基于達(dá)朗貝爾原理的車橋耦合振動(dòng)模型仿真
2022-08-22 13:39:38劉宏偉沈世鑫
計(jì)算機(jī)仿真 2022年7期
劉宏偉,沈世鑫
(青海民族大學(xué)土木與交通工程學(xué)院,青海 西寧 810007)
1 引言
達(dá)朗貝爾原理表明,對(duì)于任意一個(gè)物理系統(tǒng)來講,其內(nèi)部慣性力或是施加的外力,經(jīng)過符合約束條件的虛位移處理,力所做的虛功數(shù)值之和為零[1]。根據(jù)該原理可知,在一個(gè)結(jié)構(gòu)完整的動(dòng)力系統(tǒng)內(nèi)部,約束力做的虛功能夠產(chǎn)生自動(dòng)抵消過程,系統(tǒng)內(nèi)其它力并不會(huì)受到約束力做功的影響。車橋能夠?qū)壹芘c車架相連,車橋能夠承載汽車的整體載荷,保證汽車在道路上的行駛安全。根據(jù)驅(qū)動(dòng)方式的不同,可將車橋種類劃分為轉(zhuǎn)向橋、驅(qū)動(dòng)橋、轉(zhuǎn)向驅(qū)動(dòng)橋以及支持橋等四個(gè)種類,不同種類的車橋有著不同的驅(qū)動(dòng)功能。耦合處理能夠?qū)④嚇蚺c車輛其它部分建立起連接,形成一個(gè)縫隙整體,保證橋體的穩(wěn)定。
最早對(duì)車橋耦合振動(dòng)的研究從上個(gè)世紀(jì)初開始,以車輛和橋梁的實(shí)測(cè)數(shù)據(jù)為基礎(chǔ),在計(jì)算機(jī)技術(shù)的參與下逐漸仿真出實(shí)際的振動(dòng)模型。近年來,相關(guān)學(xué)者也對(duì)車橋耦合振動(dòng)模型做出了分析。文獻(xiàn)[2]提出基于車橋耦合振動(dòng)信號(hào)的橋梁結(jié)構(gòu)損傷識(shí)別方法,以簡(jiǎn)支梁橋?yàn)檠芯繉?duì)象,將橋梁的強(qiáng)迫振動(dòng)響應(yīng)作為擴(kuò)展卡爾曼濾波算法的觀測(cè)值,通過迭代更新完成橋梁結(jié)構(gòu)損傷參數(shù)修正,據(jù)此構(gòu)建橋梁耦合振動(dòng)模型,完成結(jié)構(gòu)損傷識(shí)別。該方法對(duì)橋梁損傷的識(shí)別較為準(zhǔn)確,但計(jì)算過程較為繁瑣;文獻(xiàn)[3]提出基于路面激勵(lì)空間效應(yīng)的車橋耦合振動(dòng)模型,通過虛擬激勵(lì)方法構(gòu)建車橋耦合隨機(jī)振動(dòng)模型,并分析了相干效應(yīng)、時(shí)滯效應(yīng)對(duì)車橋振動(dòng)的的影響。該方法的分析結(jié)果較為準(zhǔn)確,但對(duì)車橋耦合振動(dòng)頻率的控制效果較差。
針對(duì)上述方法存在的問題,本文在達(dá)朗貝爾原理下,仿真車橋耦合振動(dòng)模型,并設(shè)計(jì)仿真驗(yàn)證所設(shè)計(jì)模型的有效性。
2 基于達(dá)朗貝爾原理的車橋耦合振動(dòng)模型仿真
2.1 構(gòu)建車橋振動(dòng)響應(yīng)關(guān)系
車橋耦合產(chǎn)生振動(dòng)過程中,車輛的荷載與橋梁在形成一個(gè)時(shí)-空分布,在利用構(gòu)建車橋振動(dòng)響應(yīng)關(guān)系時(shí),首先構(gòu)建車輛荷載時(shí)-空分布識(shí)別框架。采集車輛荷載的動(dòng)態(tài)地形監(jiān)測(cè)數(shù)據(jù)和車輛空間監(jiān)控?cái)?shù)據(jù)后,運(yùn)用計(jì)算機(jī)視覺方法標(biāo)記車輛的荷載信息[4],結(jié)合交通設(shè)備的位置信息,劃定兩個(gè)車輛荷載目標(biāo)區(qū)域。在區(qū)域1的動(dòng)態(tài)地秤處安置一個(gè)探測(cè)區(qū)域,在區(qū)域2內(nèi)選取車輛子圖,利用子圖識(shí)別和粒子濾波方法處理車輛經(jīng)過全橋時(shí)的時(shí)-空位置信息[5],構(gòu)成如圖1所示的時(shí)-空識(shí)別框架。
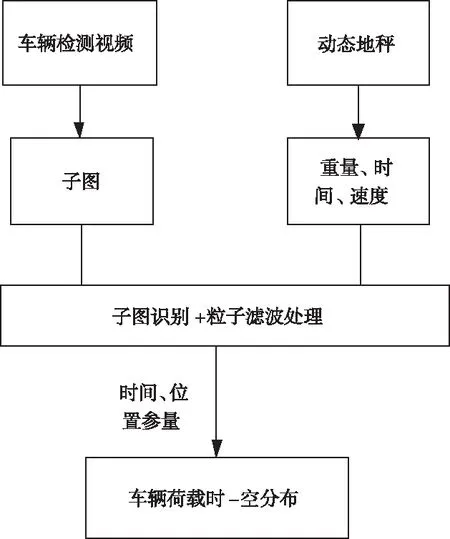
圖1 構(gòu)建的車輛荷載時(shí)-空識(shí)別框架
在圖1所示的識(shí)別框架內(nèi),采用灰度背景減除法探測(cè)車輛的運(yùn)行過程,將承載車輛的彩色幀圖像處理為三個(gè)顏色通道,根據(jù)顏色通道表現(xiàn)出的強(qiáng)度值,采用達(dá)朗貝爾原理轉(zhuǎn)化為處理灰度化數(shù)值,處理過程可表示為
(1)
其中,Rp,Gp,Bp分別表示顏色通道的強(qiáng)度值,p表示車輛處理圖像,ε表示達(dá)朗貝爾參數(shù),Λp表示轉(zhuǎn)換得到的灰度數(shù)值。灰度化處理后,根據(jù)車橋間的行駛圖像,構(gòu)建以行駛速度與車輛荷載重量為標(biāo)準(zhǔn)的指示圖像[6],根據(jù)計(jì)算機(jī)視覺方法體現(xiàn)出的橋梁接觸點(diǎn)的豎向撓度和橋面的不平整度數(shù)值,計(jì)算車輛在橋面上的耦合位移,計(jì)算公式為
(2)
其中,z表示耦合位移數(shù)值,ψi表示接觸點(diǎn)i的自由度,qi表示車輛與接觸點(diǎn)間的面積,r表示橋面不平等參數(shù)。在上述耦合位移控制下,車橋之間形成一個(gè)耦合作用力,根據(jù)橋梁的各項(xiàng)參數(shù),構(gòu)建橋梁與行駛車輛作用力間的關(guān)系如式(3)所示
{Fv}=[c]{z}+[k]{z}
(3)
其中,c表示車輛的振動(dòng)狀態(tài),k表示橋梁的振動(dòng)狀態(tài),F(xiàn)v表示橋梁與車輛之間的作用力。結(jié)合上述作用力關(guān)系,計(jì)算得到每個(gè)車輪在橋面上形成的荷載數(shù)值,可表示為
(4)
其中,η表示車輛與行駛車輛間的摩擦系數(shù),其余參數(shù)含義不變。根據(jù)上述車橋間的耦合振動(dòng)響應(yīng)關(guān)系,建立車橋耦合振動(dòng)模型。
2.2 利用達(dá)朗貝爾原理建立車橋耦合振動(dòng)模型
在上述車橋耦合振動(dòng)響應(yīng)關(guān)系控制下,假定車輛與橋面始終保持接觸[7],設(shè)定行駛車輛模型由車輪質(zhì)量和載體彈簧質(zhì)量組成,在橋梁平衡狀態(tài)下,構(gòu)建如下圖所示的車橋耦合模型:
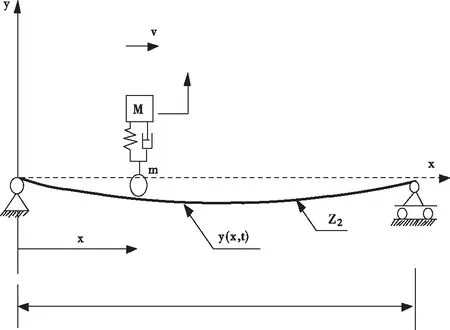
圖2 模擬得到的車橋耦合模型
在如圖2所示的耦合模型下,根據(jù)達(dá)朗貝爾原理構(gòu)建圖2耦合振動(dòng)模型的方程
mz+c[z1-y(x,t)]+k[z2-y(x,t)]=0
(5)
其中,m表示車輪質(zhì)量和載體彈簧質(zhì)量總和,z1表示車輪產(chǎn)生的耦合位移,z2表示彈簧產(chǎn)生的耦合位移,y(x,t)表示橋梁產(chǎn)生的梁位撓度函數(shù),其余參數(shù)含義不變。在上述振動(dòng)方程控制下,使用計(jì)算式(2)得到的車輪與橋梁間的位移,劃定耦合振動(dòng)模型為不同節(jié)點(diǎn),在不同跨徑長(zhǎng)度橋支梁的影響下[8],模擬移動(dòng)載體彈簧產(chǎn)生的耦合位移可表示為
x=vtk-xk
(6)
其中,v表示移動(dòng)載體彈簧,tk表示車載時(shí)間,xk表示彈簧產(chǎn)生的耦合數(shù)值。在上述計(jì)算公式的控制下,不同的位移數(shù)值產(chǎn)生的彈簧耦合數(shù)值變化如圖3所示。
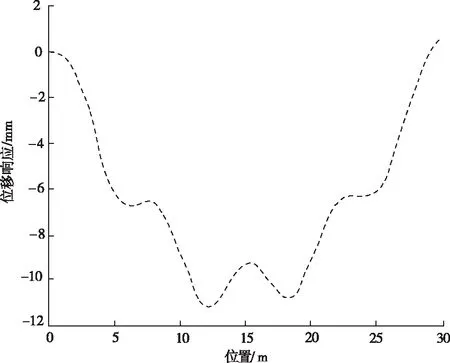
圖3 彈簧耦合數(shù)值響應(yīng)變化
在圖3所示的響應(yīng)變化下,選取位置響應(yīng)最小的點(diǎn)作為模型構(gòu)建點(diǎn),根據(jù)上述計(jì)算式(3)中的荷載數(shù)值,在橋面接觸間設(shè)定一個(gè)插值函數(shù)NT,整合為一個(gè)模態(tài)正交分解式的耦合振動(dòng)方程,可表示為
(7)
其中,M表示車橋耦合振動(dòng)模型中的廣義坐標(biāo)向量,C表示車輛的位移向量,u表示自由度,K表示模型節(jié)點(diǎn),F(xiàn)1,F(xiàn)2分別表示車橋間的荷載力。為了消除橋面不平順產(chǎn)生的隨機(jī)荷載影響,設(shè)定一個(gè)橋面不平順隨機(jī)過程,提取慢變調(diào)制函數(shù),在模型空間內(nèi)的空間域轉(zhuǎn)化為時(shí)間域[9],采用脈沖函數(shù)處理上述計(jì)算式(7),將處理后的振動(dòng)模型作為最終的振動(dòng)模型。以得到的振動(dòng)模型為作用對(duì)象,仿真處理車橋耦合振動(dòng)模型。
2.3 完成車橋耦合振動(dòng)模型的仿真
仿真處理車橋耦合振動(dòng)模型時(shí),以上述處理得到的節(jié)點(diǎn)作為處理對(duì)象,將耦合振動(dòng)響應(yīng)過程轉(zhuǎn)化到模型階段上,轉(zhuǎn)化過程可表示為:
(8)
其中,W表示轉(zhuǎn)化參數(shù),c1~cn均表示車橋間主振動(dòng)與內(nèi)振動(dòng)聯(lián)合參數(shù),B表示耦合振動(dòng)模型,{a}表示激勵(lì)集合,T表示轉(zhuǎn)化周期。轉(zhuǎn)化處理后,根據(jù)耦合振動(dòng)模型振動(dòng)單元功能[10],仿真模擬車輛平動(dòng)動(dòng)能和轉(zhuǎn)化動(dòng)能,可表示為
(9)
其中,ρ表示振動(dòng)線密度,U表示振動(dòng)慣量參數(shù),其余參數(shù)含義不變。在平動(dòng)動(dòng)能和轉(zhuǎn)化動(dòng)能的控制下,構(gòu)建的耦合振動(dòng)模型側(cè)向加速度峰值較大,一旦扭振頻率與側(cè)向模態(tài)頻率接近,車橋之間就會(huì)產(chǎn)生共振,破壞已構(gòu)建振動(dòng)模型的牢固性[11]。計(jì)算耦合振動(dòng)模型在共振時(shí)產(chǎn)生的動(dòng)態(tài)變化量
(10)
其中,ΔF表示側(cè)向加速度產(chǎn)生的彈性力,μ0表示車橋間的剛度系數(shù),F(xiàn)0表示橋梁軋制力的穩(wěn)態(tài)值。平穩(wěn)處理上述動(dòng)態(tài)變化量后,為了減少仿真過程中所需的計(jì)算量,整合上述處理過程為一個(gè)振型函數(shù),可表示為
(11)
其中,L表示橋梁的長(zhǎng)度,m表示車橋質(zhì)量,x表示耦合振動(dòng)位移,n表示車輛加速度峰值。形成的仿真過程如圖4所示。
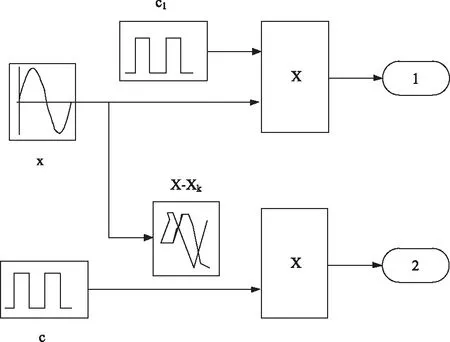
圖4 耦合振動(dòng)模型的仿真過程
不斷更新車輛加速度中的峰值后[12],最終完成對(duì)基于達(dá)朗貝爾原理的車橋耦合振動(dòng)模型的仿真過程研究。
3 實(shí)驗(yàn)分析
3.1 實(shí)驗(yàn)準(zhǔn)備
利用結(jié)構(gòu)加載系統(tǒng)來模擬車輛在橋梁上形成的加載力,使用溫度量程在100~600℃的溫度控制系統(tǒng),在計(jì)算機(jī)內(nèi)安裝一個(gè)數(shù)據(jù)采集軟件后,連接一個(gè)最大荷載值為1000kN的計(jì)算機(jī)控制電子萬能實(shí)驗(yàn)機(jī),設(shè)定實(shí)驗(yàn)機(jī)的加載控制精度為1%,采用測(cè)量標(biāo)距為45mm、量程在0~30mm、精度為0.01mm的電子引伸計(jì),搭建實(shí)驗(yàn)環(huán)境結(jié)構(gòu)如5圖所示。
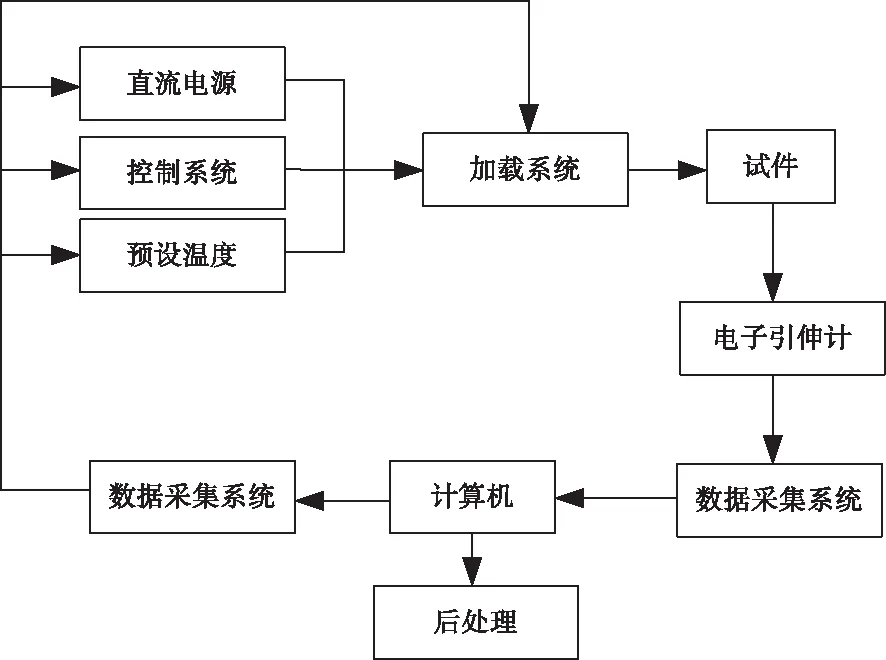
圖5 搭建的實(shí)驗(yàn)環(huán)境
在圖5所示實(shí)驗(yàn)環(huán)境下,采用低合金高強(qiáng)度鋼作為橋梁制作材料,設(shè)定模擬橋梁厚度為30mm,標(biāo)距長(zhǎng)度為1m,平行段的長(zhǎng)度為1.2m,控制各個(gè)橋梁間連接處的誤差數(shù)值小于0.05mm后,調(diào)試實(shí)驗(yàn)環(huán)境中的設(shè)備,將制作的模擬橋梁構(gòu)建放置在實(shí)驗(yàn)機(jī)上,保持橋梁構(gòu)件處于垂直方向,使用溫度加載裝置加載模擬構(gòu)件后,在計(jì)算機(jī)數(shù)據(jù)采集軟件中輸入試驗(yàn)車的參數(shù),輸入?yún)?shù)如表1所示。

表1 實(shí)驗(yàn)車輛參數(shù)
以表1所示的各項(xiàng)參數(shù)作為車輛在橋梁上形成的固定參數(shù),當(dāng)計(jì)算機(jī)內(nèi)結(jié)構(gòu)加載軟件各項(xiàng)數(shù)值顯示正常時(shí),分別使用文獻(xiàn)[2]方法、文獻(xiàn)[3]中的仿真方法以及文中設(shè)計(jì)的仿真方法進(jìn)行實(shí)驗(yàn),對(duì)比三種仿真方法的性能。
3.2 結(jié)果及分析
基于上述實(shí)驗(yàn)準(zhǔn)備,調(diào)用計(jì)算機(jī)程序?qū)Ψ抡娼Y(jié)果進(jìn)行對(duì)比驗(yàn)證,以車橋處的橫向位移作為處理對(duì)象,以實(shí)驗(yàn)車輛參數(shù)作為標(biāo)準(zhǔn)位移參數(shù),設(shè)定仿真時(shí)間為200s,以20s作為一個(gè)時(shí)間統(tǒng)計(jì)點(diǎn),以表1設(shè)定的各項(xiàng)數(shù)值作為參考,運(yùn)用計(jì)算式(2)計(jì)算得到位移數(shù)值,并將其作為標(biāo)準(zhǔn)車橋位移,統(tǒng)計(jì)車橋耦合過程中產(chǎn)生的誤差,誤差結(jié)果如表2所示。

表2 三種仿真方法得到的耦合位移誤差
由表2所示的各項(xiàng)位移誤差數(shù)值結(jié)果可知,在相同的時(shí)間統(tǒng)計(jì)點(diǎn)下,文獻(xiàn)[2]方法產(chǎn)生的平均位移誤差數(shù)值在0.144mm左右,耦合位移誤差數(shù)值較小,文獻(xiàn)[3]中產(chǎn)生的平均位移誤差數(shù)值在0.145mm左右,耦合位移誤差數(shù)值最大,而文中設(shè)計(jì)的仿真方法實(shí)際產(chǎn)生的耦合位移誤差最小,數(shù)值在0.083mm之間。
在上述實(shí)驗(yàn)環(huán)境下,采用傅里葉變換處理上述得到的耦合位移后,將統(tǒng)計(jì)時(shí)間點(diǎn)處理為五階振動(dòng)頻率,采用有限元程序Bmode處理這五階振動(dòng)頻率,得到的參數(shù)數(shù)值結(jié)果如表3所示。
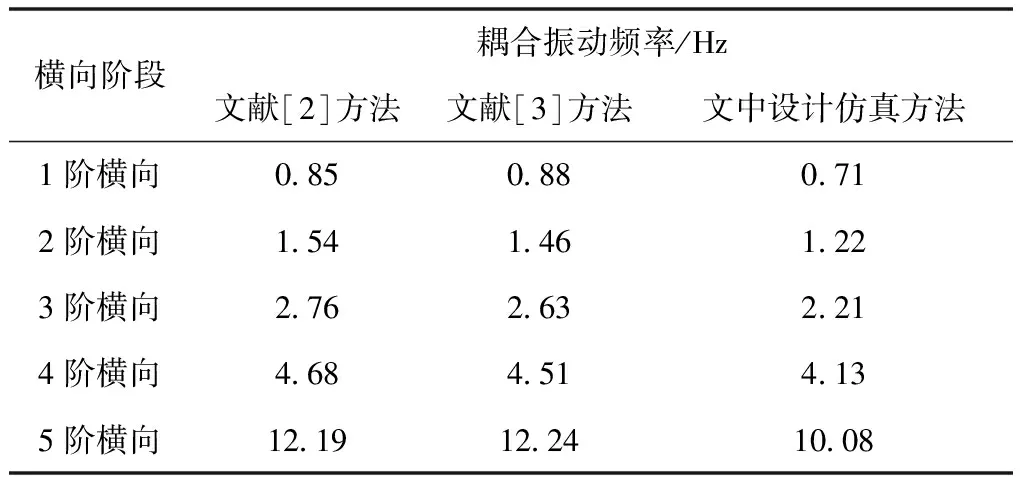
表3 三種仿真方法產(chǎn)生的振動(dòng)頻率數(shù)值
由表3所示的振動(dòng)頻率數(shù)值變化可知,以相同的階段橫向作為對(duì)比指標(biāo),在三種仿真方法的控制下,文獻(xiàn)[3]方法得到的耦合振動(dòng)頻率最大,文獻(xiàn)[2]方法方法得到的耦合振動(dòng)較小,而所設(shè)計(jì)方法的耦合振動(dòng)頻率最小。由此可見,所設(shè)計(jì)方法對(duì)振動(dòng)頻率的控制效果較好,能夠在一定程度上抑制車橋之間共振作用對(duì)橋梁結(jié)構(gòu)產(chǎn)生的沖擊。
設(shè)定三種仿真方法的操作數(shù)據(jù)數(shù)量為10組,定義仿真方法的訓(xùn)練參數(shù)R為表示仿真方法計(jì)算量的參數(shù),訓(xùn)練參數(shù)R的計(jì)算公式可表示為
(12)
其中,σ表示各項(xiàng)數(shù)值的高斯算子再生核,gi表示車橋的各項(xiàng)數(shù)據(jù)集合,fi表示精度參數(shù)。計(jì)算并統(tǒng)計(jì)三種仿真控制下,仿真車橋耦合振動(dòng)模型的訓(xùn)練參數(shù)大小,結(jié)果如表4所示。
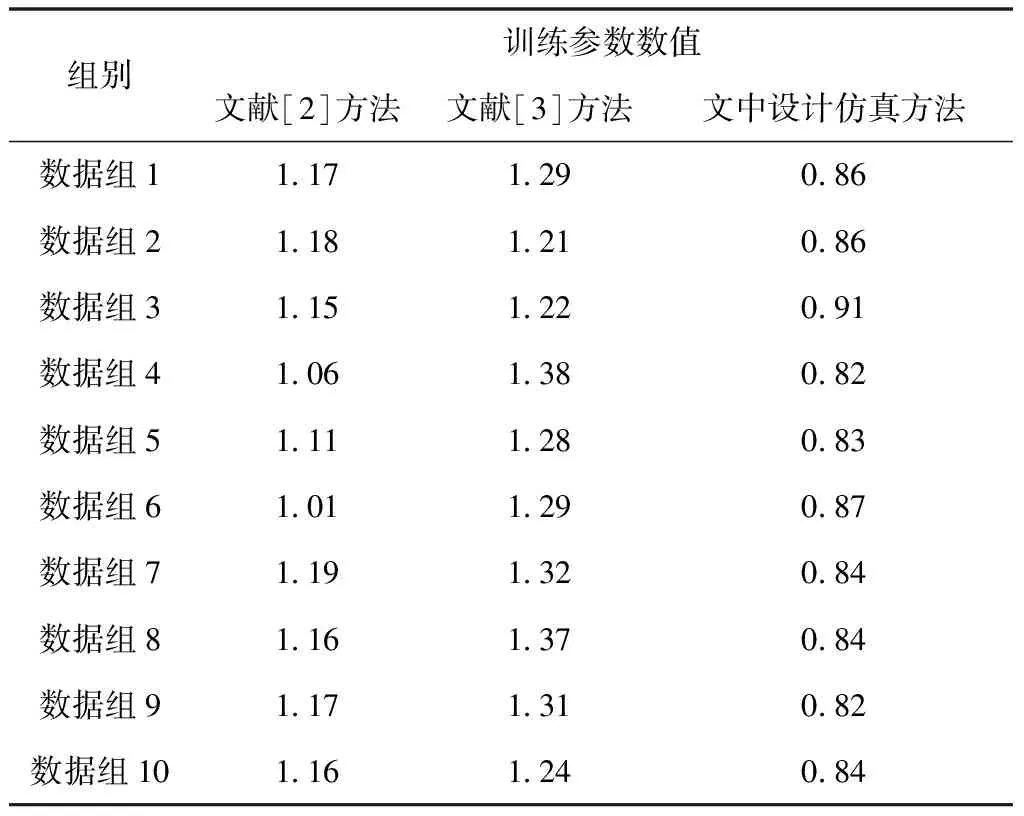
表4 三種仿真方法得到的訓(xùn)練參數(shù)數(shù)值
定義訓(xùn)練參數(shù)R數(shù)值大于1表明該種仿真方法產(chǎn)生較大的計(jì)算量,R的數(shù)值小于1時(shí),表明該種仿真方法計(jì)算量較少。由上表所示的訓(xùn)練參數(shù)數(shù)值結(jié)果可知,文獻(xiàn)[2]方法與文獻(xiàn)[3]方法產(chǎn)生的訓(xùn)練參數(shù)數(shù)值大于1,表明兩種仿真方法產(chǎn)生的計(jì)算量較大,而文中設(shè)計(jì)的仿真方法得到的訓(xùn)練參數(shù)數(shù)值小于1,表明該種仿真方法最終產(chǎn)生的計(jì)算量最少。
4 結(jié)束語
車橋之間的共振作用會(huì)對(duì)橋梁結(jié)構(gòu)產(chǎn)生一定的沖擊,影響橋梁結(jié)構(gòu)的安全。為此,在達(dá)朗貝爾原理的基礎(chǔ)上,仿真車橋耦合振動(dòng)模型,改善現(xiàn)有仿真方法計(jì)算量過大的不足。仿真結(jié)果表明,所設(shè)計(jì)方法能夠在較少計(jì)算量的前提下有效控制車橋耦合振動(dòng)批頻率及耦合位移誤差,為今后仿真處理工作提供一定的研究方向。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2019年4期)2019-04-22 03:28:24
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:04
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
計(jì)算物理(2014年2期)2014-03-11 17:01:44
