智能農機自動導航系統應用研究
2022-08-15 07:33:58陳爽
農機使用與維修 2022年8期
關鍵詞:農業
0 引言
我國國土面積龐大,北方地區有大面積可以用于農業生產的土地,地勢平坦。同時,南部地區農工模式和結構的轉變導致了農業集中的趨勢,大面積的農業用地數量增加。在這種情況下,仍然使用傳統的耕作方法,不僅效率低下,而且需要高額的生產投入,無法促進農業現代化
。例如,作物需要在合適的時間播種,而人工播種的效率低,可能會錯過最佳播種時間,這會影響作物生長。農業生產機械化是農業現代化的一個重要因素,我國的農業機械化水平發展迅速,水稻、玉米和小麥三大主糧作物基本可以實現全程機械化,但由于一些地區自然條件,現有的農業機具難以進行作業。因此,進一步提高機器的適應性和自動化程度對實現農業可持續發展至關重要
。
從農戶利益的角度出發,合作社一體化是最優的農業產業化模式。合作社能夠強有力地在統一時間聚集社員進行新季度的工作安排,靈活又有效地保障農業經濟發展,而有效的管理使資源得到合理利用。龍頭企業帶動農業經濟合作模式收納高質量農產品,使農戶手里的農產品發揮了最好的價值,避免了低質量產品的農戶產生“搭便車”行為,提高農戶種植高質量產物的積極性;在企業內部采用區別定價法,增強了龍頭企業與合作社之間的競爭,不僅能夠讓合作社產生更大的市場份額,還可以讓有組織的農業經濟得到一步發展。
20世紀90年代末期,精準農業的概念首次被提出,在全球范圍內掀起了一陣新的浪潮,也是現代農業發展的必然走向。精準農業對于農業生產規模的擴大、農業生產專業化水平的提高有顯著影響。精準農業要求生產過程應該具備更高的農業技術水平。農業機械自動導航作為農業機械自動化及智能化能力的關鍵組成部分,對于有效降低勞動成本,以及極大程度提高土地適用面積來說是極其重要的
。農機導航系統的真正應用價值應體現在實時性、可靠性和準確性三個方面的特點。
1 智能農機自動導航系統
在常規農業機械的基礎上設計了一個包括發動機、液壓油箱、轉向液壓油缸、齒輪液壓油泵、安全閥、轉向控制器在內的一整套液壓系統,與無線衛星接收系統進行配合使用;創建一個硬件仿真平臺;對拖拉機的運行情況、導航算法是否精準、編程能力如何等進行研究,為進一步發展應用和改進算法打下堅實基礎。
1.1 硬件系統
本研究主要通過拖拉機配備的硬件平臺,模擬大型拖拉機的運行狀態,并結合軟件導航系統,開發農業機械自動導航系統的硬件工具組合。該模型原理如圖1所示。
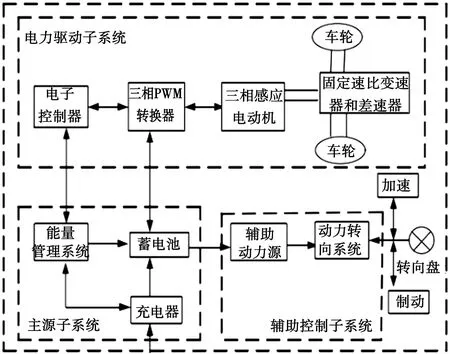
自動導航系統通過GPS定位控制拖拉機的行駛方向和行駛路線,航向追蹤是指在拖拉機行駛方向已知的情況下通過控制技術使拖拉機按照目標行駛方向行駛。主要包括以下兩方面:

農業機械的液壓轉向系統是由夾持機構、油缸、油泵、安全閥、單向閥、過濾器、轉向器和輔助部件組成。農業機械的動力要求和實際作用決定了液壓裝置和轉向機構的設計構造,可按需選擇信號。如果功率大,采用開芯無反應轉向,方向盤的位置取中,可有效實現獨立卸荷;若功率小,采用閉芯轉向,方向盤也在中間位置,在變量泵相互匹配后才可以完成卸荷。可編程控制器則是由編程來完成系統的控制。車載接收器接收無線衛星信號后將其信號傳輸至車載計算機;自動導航軟件系統將接收到的信號處理后,將其傳輸至可編程控制器,由控制器控制液壓系統和轉向機構及轉向角度,實現自動操控。
1.2 軟件控制系統
培養城市會展旅游品牌就是為城市制作一張拿得出手的會展旅游名片,有助于提升成都市在游客中的影響力。想要培養成都市的會展旅游品牌,首先要找出成都市的優勢產品、優勢行業和優勢會展。提到成都,人們往往會首先想到國寶大熊貓或者火鍋、串串等具有地方特色的美食。成都市可以圍繞這些知名的產品打造具有特色的會展項目,會展要具有鮮明的主題特色,定期舉辦,提供專業的服務,集中資源對會展旅游品牌進行大力營銷推廣。培養城市會展旅游品牌不僅可以促進成都市的整體會展旅游建設發展,還能提升游客的感知價值。
設計的過程中,以速度變化率為依據,進行自適應PID的設計,利用該控制器可實現航向追蹤控制。通過計算先得到拖拉機實際行駛方向與目標行駛方向的偏差,其次將得到的數據輸入到控制器的系統,依據拖拉機的實際作業情況控制器可以生成實時調節參數,并通過這些生成的控制參數控制轉向機構。
1.3 航向追蹤
車模系統主要由車身結構、電子控制器、電動機、電源、充電器、轉換器等組成,配有一個可拆卸的液壓系統,便于進行各種實驗。其主要功能是:1)車身。由車架、車輪、方向盤、指示燈、座椅、喇叭、反光鏡等共同組成。2)電動機。該電動機是三相異步型,是該型號的供電單元。3)中央控制器。可以控制電機的啟動與停止、轉動速度和轉動的方向。4)電池。該模型所需的電源和照明功率由電池提供。目前,拖拉機大多由液壓系統控制轉向。該模型液壓轉向系統結構如圖2所示。
該軟件設計對于拖拉機自動導航系統操作的便利性有顯著的積極影響,而且能夠利用軟件調節校正,增強算法的穩定性,實現拖拉機行走路徑控制和作業精度控制。軟件在進行工作過程中,控制界面上可以動態實時地顯示追蹤結果,可以在對話框隨時調整拖拉機的行駛路線;通過計時器結合算法可以推算拖拉機的行走路徑,在系統中自動制定下一個時間單元的行駛路線和方向。
1.1 換元基礎上的數形結合法 換元思想是指通過變元或式表示、代替或轉換為某些確定的數學對象,將數學問題化繁為簡、化難為易,從而達到化未知到已知的終極目標的一種思維傾向。換元思想的本質是映射轉移,或者說就是引進某種新的映射,對原給定的函數進行分解或實施復合,它的理論依據是等量代換〔2〕。
2)通過PID實現自適應速度控制。拖拉機在實際行駛中可能會發生下面幾種情況:①勻速行駛;②進行轉彎時,速度逐漸降低;③拖拉機在曲線行駛時,隨著曲率的變化速度也一直在改變;④行駛結束時,速度逐漸降低并平穩停止。
1)利用PID技術規范行駛路線。PID控制是線性控制技術,算法極其繁瑣,但是控制質量精準。根據校正的方式將其分為三個部分,分別為比例校正、微分校正和積分校正。比例校正是指通過比例對系統的誤差做出反應,并及時規范控制器正確工作,以減小系統誤差;調節速度與比例系數之間呈正比;最后通過積分校正部分對系統內部穩態誤差實現徹底清除。清除質量與積分常數呈現正比關系,清除過程中容易發生穩定性變差和振蕩等問題。因此,在微分校正部分需要依據誤差信號進行應對,在誤差信號變大前需要輸入早期矯正信號,這樣可以減少調節時間,系統響應速度也會有一個大的提升。
取2016年3月—2018年6月我院收治的CT增強掃描患者106例,研究組(53):男33例,女20例,年齡9~84歲,平均年齡為(68.83±11.25)歲;對照組(53):男32例,女21例,年齡10~86歲,平均年齡(68.92±11.34)歲。各資料無差異(P>0.05),可比。
1.4 路徑追蹤
路徑跟蹤分為三個步驟:第一,得到拖拉機和預定目標之間相關聯的動態參數;第二,確定機動控制的范圍;第三,對其做出精確的控制操作。在實際作業過程中,通過位置信息接收器接收到與預定目標之間相關聯的動態參數,并以這些參數作為基本信息進行研究分析;設置一個預覽點,得到兩個參數:橫向跟蹤的誤差和路線的縱向偏差,通過方案算法得出最合適的控制動作,并在指定時間執行該控制動作;機器的運動狀態參數在運行中是連續循環傳輸給系統控制的動態過程。
2 田間試驗
2.1 試驗設計
為了驗證所設計的自動導航系統的精度和可靠性,在田間分別進行了播種和覆膜作業試驗。試驗將手動駕駛和自動駕駛兩種駕駛模式進行對比,五種速度設定為8 m·s
、9 m·s
、10 m·s
、11 m·s
和12 m·s
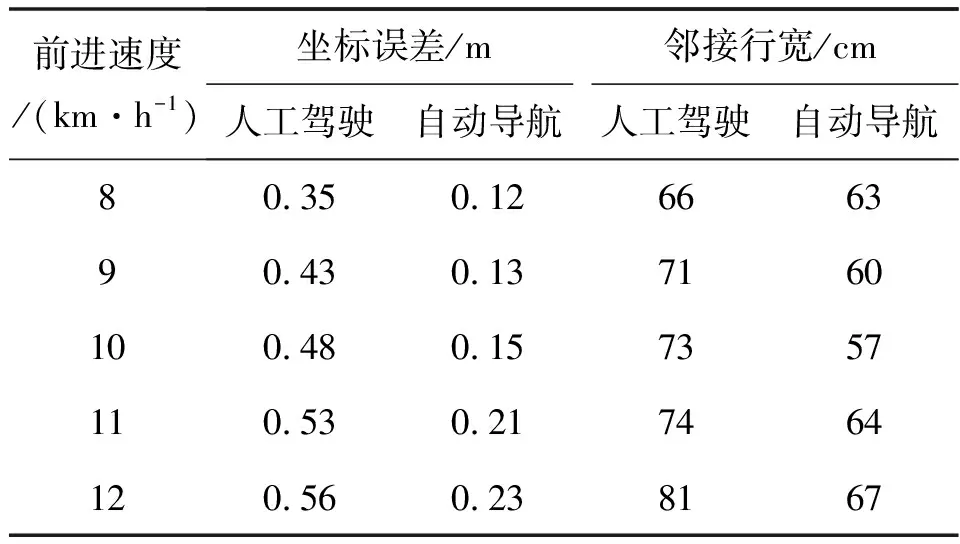
。每個速度下,在設定的路線上行走200 m,然后在路線上隨機選擇30個點。播種時人工測量播種誤差,相鄰行寬(標準60 cm)在覆土時測量。坐標誤差是指實際坐標與理論坐標之間的偏差,可以反映出導航的作業精度。行寬是指相鄰兩條壟行之間的距離,可以反映出土地利用率指標。試驗現場如圖3所示。

2.2 試驗結果和分析
田間試驗的結果如表1所示。隨著拖拉機運行速度的提高,人工駕駛播種的精度也在下降,最終坐標誤差達到0.56 m。自動導航的準確性有所下降,但最大的坐標誤差只有0.23 m,這在可接受的范圍內。在覆膜作業時,隨著拖拉機速度的增加,手動駕駛模式下相鄰行的寬度也在增加,與標準行寬度的差異也在增加,最終誤差達到20 cm。在不同速度的自動導航中,相鄰行的寬度幾乎不偏離設定的標準,最大為6 cm,相鄰行很少被遺漏,說明土地利用率高。
3 結論
設計了包括發動機、液壓油箱、轉向液壓油缸、齒輪液壓油泵、安全閥、轉向控制器等配件在內的一整套液壓系統,其需與無線衛星接收系統組合使用;依據角度傳感器設計實驗了一個硬件模擬平臺,以便模擬拖拉機的運行狀態和情況。該系統被安裝在拖拉機上,以驗證其在田間播種和覆土試驗中的實時和精確導航。結果顯示,在不同的速度下,該系統提供了比人工駕駛更好的導航精度和土地利用,并能在技術上支持農業機械的智能化和自動化改造,開辟了廣泛的應用。
[1] 朱立安.論智能農機自動導航系統應用研究[J].現代農業研究,2021,27(8):75-76.
[2] 楊柏婷.關于智能農機自動導航系統的應用探討[J].南方農機,2020,51(21):57-58.
[3] 張漫,季宇寒,李世超,等.農業機械導航技術研究進展[J].農業機械學報,2020,51(4):1-18.
[4] 黃振.智能農機中精準定位的研究與實現[J].微型機與應用,2017,36(23):25-27.
[5] 孫琦.智能農機自動導航系統應用研究[J].農機化研究,2018,40(4):230-233.
[6] 宋春月.無人駕駛拖拉機控制系統設計研究[D].上海:上海工程技術大學,2015.
[7] 羅為林.農業機械導航技術發展分析[J].時代農機,2017,44(12):23-24.
[8] 周巖,王雪瑞.基于WSN的智能農機自動導航控制系統研究[J].計算機測量與控制,2015,23(9):3038-3041.
[9] 高雷,胡靜濤,李逃昌,等.以角速度為轉向動作反饋的拖拉機自動導航控制系統[J].農機化研究,2015,37(3):25-29.
[10] 朱清山,高廣智,牛文祥.農機自動導航駕駛系統及其應用[J].現代化農業,2016,34(5):65-67.
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2021年13期)2021-08-14 01:38:18
今日農業(2020年15期)2020-12-15 10:16:11
今日農業(2019年12期)2019-08-13 00:49:56
現代營銷(創富信息版)(2018年3期)2018-03-15 08:05:29
現代營銷(創富信息版)(2018年2期)2018-02-10 05:20:47
江蘇年鑒(2014年0期)2014-03-11 17:09:36
