非圓齒輪系齒廓曲線的優(yōu)化設(shè)計計算方法研究
2022-08-12 01:54:36張秋菊孫智甲楊晰予王柯翔
現(xiàn)代信息科技 2022年7期
關(guān)鍵詞:設(shè)計
張秋菊,孫智甲,楊晰予,王柯翔
(河南理工大學(xué),河南 焦作 454003)
0 引 言
非圓齒輪系液壓馬達(dá)是一種新興的、綜合性能優(yōu)異的液壓馬達(dá),能夠被廣泛應(yīng)用在煤礦、建筑、船舶、航空航天等行業(yè),具有很好的應(yīng)用前景和較高的市場價值。非圓齒輪行星輪系是非圓齒輪液壓馬達(dá)的核心運(yùn)動機(jī)構(gòu)。在非圓齒輪系中,非圓齒輪的節(jié)曲線多采用高階橢圓曲線,類型變化多樣,沿節(jié)曲線均布的齒廓曲線每條都有不同的長度和形狀,這些特點(diǎn)給馬達(dá)虛擬樣機(jī)的建立以及數(shù)控加工模型的建立帶來了不小的困難。設(shè)計符合齒輪系運(yùn)動關(guān)系的沿非圓形的節(jié)曲線均布的齒廓曲線,不僅是進(jìn)行非圓齒輪系傳動設(shè)計的核心內(nèi)容,同時也是進(jìn)行非圓齒輪系的運(yùn)動學(xué)、動力學(xué)相關(guān)理論研究的基礎(chǔ)。因此,開發(fā)一種能夠快速生成非圓齒輪系齒廓曲線的數(shù)值算法是目前亟待解決的關(guān)鍵問題。
共軛嚙合算法由于計算邏輯清晰,目前被廣泛用于非圓齒輪系的齒廓坐標(biāo)的計算。根據(jù)非圓齒輪系的嚙合運(yùn)動原理,共軛嚙合法計算行星輪在任意運(yùn)動時刻與非圓齒輪的嚙合點(diǎn)的坐標(biāo),并利用多次坐標(biāo)變換最終計算非圓齒輪的齒廓坐標(biāo)。在理論上,計算獲得的齒廓坐標(biāo)的數(shù)量越多,由齒廓坐標(biāo)所擬合的齒廓曲線就越精確。盡管現(xiàn)有的算法通過增加齒廓點(diǎn)的坐標(biāo)計算,能夠提高對齒廓曲線的設(shè)計計算精度,但這樣會帶來更多的數(shù)值計算量,進(jìn)而提高設(shè)計計算的計算機(jī)硬件成本,尤其會降低設(shè)計計算的效率。
為了提高對非圓齒輪系的齒廓曲線的設(shè)計計算效率,基于共軛嚙合算法,本文利用預(yù)存數(shù)據(jù)插值法代替目前算法中大量的對于內(nèi)齒圈極角的微分方程的求解計算,進(jìn)而提出一種針對非圓齒輪系的齒廓曲線設(shè)計的優(yōu)化算法。本文利用非圓齒輪系的仿真?zhèn)鲃釉囼灒诶碚撛O(shè)計層面對算法進(jìn)行了驗證;利用非圓齒輪的金屬線切割加工和實(shí)際的齒輪傳動試驗,驗證了算法的工程應(yīng)用價值。
1 非圓齒輪的齒廓點(diǎn)坐標(biāo)的數(shù)學(xué)計算模型
在非圓齒輪系的運(yùn)動中,如果不考慮齒輪嚙合所發(fā)生的滑移,則非圓齒輪的齒廓點(diǎn)是它們與行星輪齒廓曲線的瞬時重合點(diǎn),即瞬時的嚙合點(diǎn)。因此,本文建立如圖1所示的數(shù)學(xué)模型,該模型利用坐標(biāo)變換的方法計算非圓齒輪的齒廓嚙合點(diǎn)的坐標(biāo),進(jìn)而擬合出非圓齒輪的齒廓曲線。

圖1 非圓齒輪齒廓點(diǎn)坐標(biāo)的數(shù)學(xué)計算模型示意圖
在內(nèi)齒圈、行星輪、太陽輪的幾何中心分別建立隨之運(yùn)動的極坐標(biāo)系XOY、XOY、XOY,其中O和O重合。假設(shè)圖1(a)所示的為齒輪系運(yùn)動的初始時刻,在此刻,三個極坐標(biāo)系的Y 軸的正方向重合。當(dāng)太陽輪繞O點(diǎn)沿順時針方向旋轉(zhuǎn),在齒輪傳動的下一個任意時刻,如圖1(b)所示,行星輪的節(jié)圓與內(nèi)齒圈、太陽輪的節(jié)曲線分別相切于圖示C 點(diǎn)和D 點(diǎn),由三心定理證明,C、D 與O在一條直線上。圖中C 點(diǎn)在內(nèi)齒圈的隨動坐標(biāo)系XOY中所對應(yīng)的極角為,D 點(diǎn)在太陽輪的隨動坐標(biāo)系XOY中所對應(yīng)的極角為。
1.1 數(shù)學(xué)模型的基本方程
依據(jù)非圓齒輪系的運(yùn)動學(xué)規(guī)律,在齒輪系的嚙合運(yùn)動中,內(nèi)齒圈、太陽輪做同軸的自轉(zhuǎn)運(yùn)動,行星輪自轉(zhuǎn)的同時繞太陽輪公轉(zhuǎn),并且行星輪的節(jié)圓與內(nèi)齒圈和太陽輪的節(jié)曲線做相切的純滾動,由此,太陽輪的節(jié)曲線是內(nèi)齒圈的節(jié)曲線的共軛曲線。在坐標(biāo)系XOY中,如果給定內(nèi)齒圈的節(jié)曲線方程為:

其中,是的函數(shù),其具體形式由設(shè)計確定。
由共軛嚙合算法可以推導(dǎo)出太陽輪的參數(shù)方程:


1.2 非圓齒輪齒廓坐標(biāo)點(diǎn)的數(shù)學(xué)計算
以行星輪的中心為原點(diǎn),建立直角坐標(biāo)系XOY和XOY,要求兩個坐標(biāo)系的Y 軸的正向分別為從O點(diǎn)指向C、D 的方向。如圖2(a)所示,Y與Y的夾角為,Y與Y的夾角為。此刻,如果行星輪齒廓上一點(diǎn)S 與太陽輪齒廓嚙合,假設(shè)它們的齒廓為理想曲線,那么S 點(diǎn)同樣是太陽輪齒廓上的一點(diǎn)。

圖2 齒廓點(diǎn)的坐標(biāo)變換示意圖
根據(jù)齒輪系中各齒輪的節(jié)曲線純滾動的假設(shè),Y與Y的夾角可以用下式計算:

與對應(yīng)的是Y與Y的夾角,用下式計算:

在行星輪的傳動過程中,()和()具有唯一的對應(yīng)關(guān)系。
對于使用漸開線齒廓設(shè)計的行星輪,如圖2(b)所示,在坐標(biāo)系XOY中,S 點(diǎn)的坐標(biāo)為:

其中,||和可以聯(lián)立下列方程計算:

上述方程中,r是行星輪節(jié)圓半徑,是行星輪的齒數(shù),是分度圓壓力角,是行星輪在Y和Y的負(fù)半軸之間的輪齒數(shù)。
利用坐標(biāo)系XOY和XOY之間的坐標(biāo)變換,最終能夠計算出S 點(diǎn)在太陽輪隨動坐標(biāo)XOY中的坐標(biāo),即計算出來太陽輪齒廓上一點(diǎn)的坐標(biāo):

其中,(,)是行星輪中心在坐標(biāo)系XOY中的坐標(biāo)。
采用上述的計算方法,利用XOY與XOY之間的坐標(biāo)變換,同樣能夠計算獲得C點(diǎn)所對應(yīng)的內(nèi)齒圈齒廓點(diǎn)的坐標(biāo)。
2 非圓齒輪齒廓點(diǎn)坐標(biāo)的數(shù)值優(yōu)化算法
非圓齒輪與行星輪的齒數(shù)比確定之后,需要計算的齒廓數(shù)量,即式(6)中的值的范圍是確定的。從圖2(b)可以看出,在齒輪的嚙合過程中是單調(diào)變化的。
當(dāng)值確定,即當(dāng)行星輪的第個輪齒與太陽輪嚙合,在該輪齒脫離嚙合之前,∈(,),其中對應(yīng)于行星輪齒根嚙合,對應(yīng)于行星輪齒頂嚙合。設(shè)數(shù)組:

其中,=t,=t,=+(t-t)/(-1),≤。值設(shè)定越大,對齒廓點(diǎn)的計算數(shù)量越大,對齒廓曲線的擬合精度相對越高。
當(dāng)設(shè)定了,容易根據(jù)()和()的對應(yīng)關(guān)系計算()對應(yīng)的數(shù)組。此時,現(xiàn)有的計算方法會將帶入式(4),利用微分方程求解=[,,…,]。在獲得數(shù)組之后,聯(lián)立方程(5)(6)和(7)最終獲得各齒廓點(diǎn)的坐標(biāo)(,)。在每個齒廓點(diǎn)坐標(biāo)的計算中,上述方法都要將帶入式(4),求解一次復(fù)雜的微分方程。高精度的齒廓設(shè)計計算需要大量的齒廓點(diǎn)坐標(biāo),因此,上述方法會帶來大量的數(shù)值計算量。為了減少數(shù)據(jù)計算量,提高對非圓齒輪的齒廓的設(shè)計計算效率,本文提出預(yù)存數(shù)據(jù)插值法解決上述問題。
本文首先建立數(shù)組=[,,…,],利用方程(3)和(4)獲取預(yù)存數(shù)據(jù)=[,,…,] 和=[,,…,],則通過一次計算獲得了內(nèi)齒圈節(jié)曲線的極角與行星輪嚙合轉(zhuǎn)角以及的關(guān)系。在后續(xù)的計算中,可以根據(jù)設(shè)計需要確定和的值,然后利用對預(yù)存數(shù)據(jù)的插值快速計算出它們所對應(yīng)的值。本文所提方法的具體步驟,參加圖3所示的計算流程。

圖3 齒廓點(diǎn)坐標(biāo)的數(shù)值計算流程圖
3 算法的試驗驗證與分析
3.1 行星輪齒廓與非圓齒輪齒廓的干涉驗證
基于本文所提算法,以為驅(qū)動變量,編寫內(nèi)齒圈和太陽輪齒廓曲線的設(shè)計計算程序,并將每個計算位置的行星輪齒廓曲線與非圓齒輪齒廓的擬合曲線輸出在非圓齒輪的隨動坐標(biāo)系中,如圖4所示。
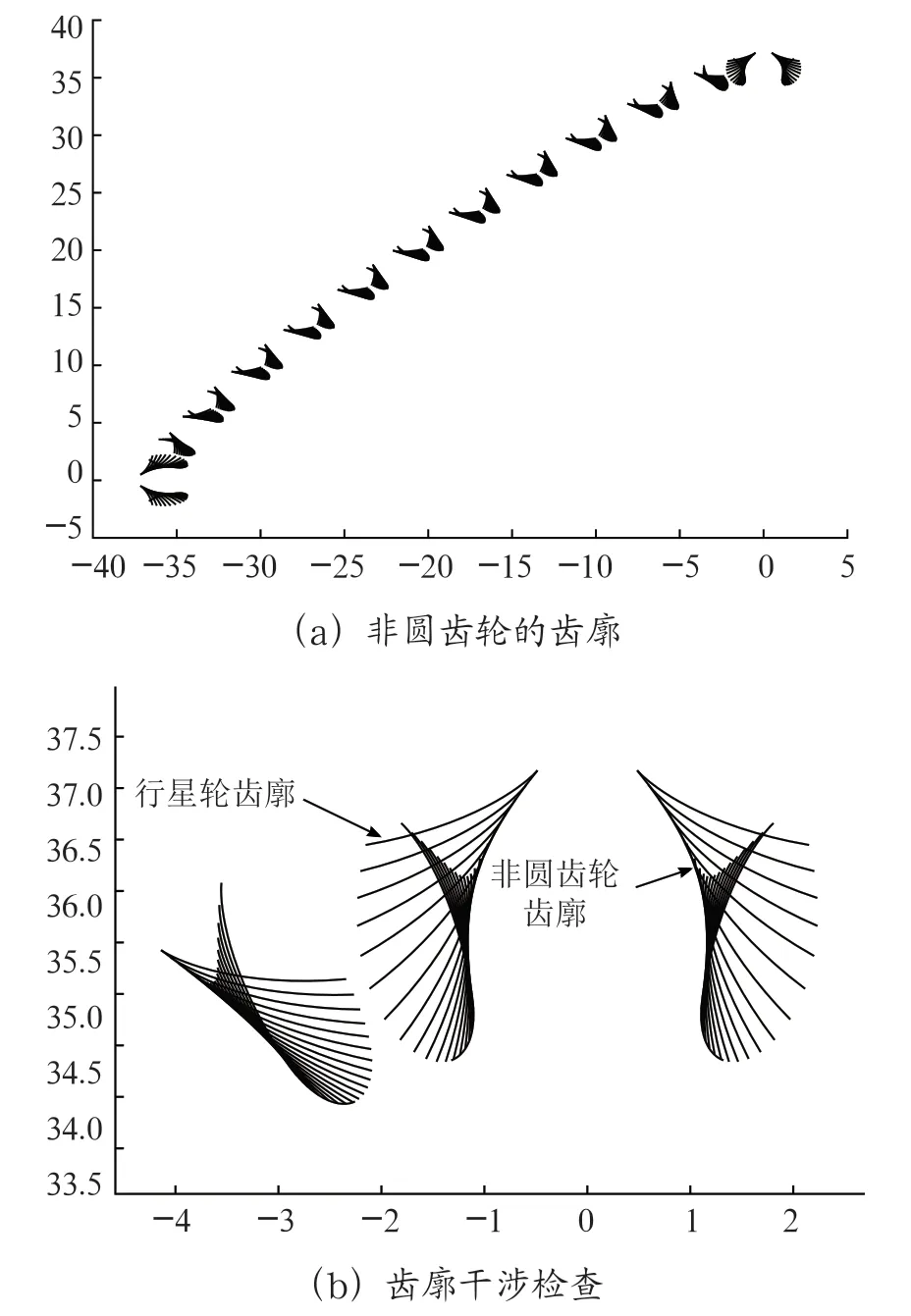
圖4 利用計算程序生成的非圓齒輪的齒廓曲線
從圖4可以看出,行星輪的齒廓在每個位置都與擬合所得非圓齒輪的齒廓曲線相切,并且沒有發(fā)生齒廓的干涉問題,由此可以證明,本文所提算法能夠正確計算非圓齒輪的齒廓點(diǎn)的坐標(biāo),所擬合的齒廓曲線在理論上能夠?qū)崿F(xiàn)非圓齒輪系的運(yùn)動學(xué)原理,且不會發(fā)生輪齒干涉問題。
3.2 非圓齒輪系的傳動試驗
3.2.1 數(shù)值傳動仿真試驗
利用圖4中所示的可視化界面對非圓齒輪系進(jìn)行了靜態(tài)干涉檢查之后,還需要建立齒輪系的傳動仿真模型,進(jìn)而驗證算法生成的齒廓在運(yùn)行中是否發(fā)生“卡齒”問題。
將算法生成的齒廓導(dǎo)入CAD 軟件,建立非圓齒輪系的三維數(shù)字模型,然后使用Adams 軟件建立起齒輪機(jī)構(gòu)的傳動仿真模型。在仿真模型中,內(nèi)齒圈被施加固定約束,太陽輪被施加與內(nèi)齒圈軸線重合的旋轉(zhuǎn)約束,行星輪被施加了與非圓齒輪的接觸約束。在對非圓齒輪機(jī)構(gòu)的傳動仿真的過程中,太陽輪被施加勻速的定軸旋轉(zhuǎn)動力,太陽輪在定軸旋轉(zhuǎn)的同時,通過齒面接觸力推動行星輪運(yùn)動,從而模擬行星輪機(jī)構(gòu)的實(shí)際的嚙合運(yùn)動。圖5(a)所示為行星輪的仿真運(yùn)動軌跡。
除了對齒輪機(jī)構(gòu)的嚙合運(yùn)動進(jìn)行可視化的仿真之外,傳動仿真模型還實(shí)時采集齒輪機(jī)構(gòu)的運(yùn)動學(xué)和動力學(xué)的仿真實(shí)驗數(shù)據(jù),并將行星輪的仿真軌跡與理論軌跡進(jìn)行對比,如圖5(b)所示。上述的傳動仿真試驗的結(jié)果表明,使用本文算法所設(shè)計的非圓齒輪系傳動結(jié)構(gòu),在運(yùn)動中能夠?qū)崿F(xiàn)行星輪的預(yù)設(shè)傳動軌跡,實(shí)現(xiàn)預(yù)期的嚙合傳動。本文利用非圓齒輪系的傳動仿真模不僅驗證了所提出的齒廓算法,而且獲得了齒側(cè)隙的設(shè)計范圍。研究發(fā)現(xiàn)如果行星輪與非圓齒輪的齒側(cè)隙如果超出了該設(shè)計范圍,無論是側(cè)隙過大,還是側(cè)隙過小,非圓齒輪機(jī)構(gòu)在傳動過程中都會發(fā)生“卡齒”的問題。

圖5 非圓齒輪結(jié)構(gòu)的傳動仿真模型和傳動仿真數(shù)據(jù)
3.2.2 非圓齒輪系的加工和傳動試驗
參照仿真試驗所確定的齒側(cè)隙的設(shè)計范圍,使用本文算法生成非圓齒輪的齒廓數(shù)據(jù),將其導(dǎo)入金屬線切割設(shè)備中,實(shí)際加工了液壓馬達(dá)的非圓齒輪傳動機(jī)構(gòu),圖6(a)所示。


圖6 非圓齒輪的加工和傳動試驗
設(shè)計并加工專門的非圓齒輪系傳動試驗裝置,使用齒輪傳動試驗臺,進(jìn)行了非圓齒輪系的傳動試驗,如圖6(b)所示。試驗結(jié)果表明,所加工的非圓齒輪系的傳動機(jī)構(gòu),在太陽輪的轉(zhuǎn)速低于800 r/min 的條件下,未出現(xiàn)齒輪卡死,未產(chǎn)生劇烈的機(jī)械振動。綜上結(jié)果表明,本文所提的算法能夠被用于非圓齒輪系的工程設(shè)計中,具有較好的工程應(yīng)用價值。

圖6 HMI 顯示界面
4 結(jié) 論
(1)基于非圓齒輪系的共軛嚙合算法,本文提出了一種非圓齒輪系齒廓曲線的優(yōu)化設(shè)計算法,該算法利用對預(yù)存數(shù)據(jù)的插值算法,減少傳統(tǒng)算法中大量的微分方程的求解計算,從而優(yōu)化了算法的計算效率。
(2)本文建立了非圓齒輪系的傳動仿真模型,通過傳動仿真試驗對算法生成的齒廓曲線進(jìn)行了傳動仿真驗證。仿真結(jié)果表明,使用本文算法所生成的齒廓曲線能夠?qū)崿F(xiàn)行星輪的預(yù)設(shè)傳動軌跡,不會發(fā)生“卡齒”問題。
(3)利用算法生成的齒廓數(shù)據(jù),本文加工了非圓齒輪,并利用所加工的齒輪完成了非圓齒輪系的齒輪傳動試驗。試驗結(jié)果表明,本文算法所設(shè)計的齒輪能夠直接用于工程實(shí)際。
綜上所述,本文提出了一種用于非圓齒輪系齒廓曲線設(shè)計的優(yōu)化數(shù)值算法,該算法對于非圓齒輪系的優(yōu)化設(shè)計理論的發(fā)展,以及工程應(yīng)用的推廣具有一定的價值。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04

- 現(xiàn)代信息科技的其它文章
- 線上教學(xué)在高職網(wǎng)絡(luò)安全專業(yè)課程中的應(yīng)用研究
- “PLC應(yīng)用技術(shù)”課程線上線下混合教學(xué)改革探討
- 基于“實(shí)戰(zhàn)+模擬+SPOC”的混合式教學(xué)生態(tài)系統(tǒng)設(shè)計與實(shí)踐
——以“網(wǎng)絡(luò)零售運(yùn)營”課程為例 - 基于在線教學(xué)平臺的動畫創(chuàng)意與設(shè)計課程教學(xué)研究
- HTML5 Canvas在應(yīng)力狀態(tài)教學(xué)中的應(yīng)用研究
- 超星平臺在“工程熱力學(xué)”課程中的應(yīng)用研究