一種民用飛機電作動艙門集中式控制方案研究
2022-08-11 03:49:50李亞倫齊蓉周素瑩鞏明超劉二豪
航空工程進展 2022年4期
李亞倫,齊蓉,周素瑩,鞏明超,劉二豪
(西北工業大學自動化學院,西安 710129)
0 引 言
近年來,多電飛機的發展一直受到各國研究者的關注,其特征是使用機電作動器(EMA)逐步取代液壓、氣壓以及機械作動器。早在20世紀70年代初期,美國空軍對機電作動取代液壓作動進行研究,目前多電技術已在空客A380、波音B787和F-35等型號飛機上獲得應用和驗證。此外,在飛機的體系結構上,實施公共設備的機電綜合管理,是飛機管理系統的發展方向。國外在20世紀80年代就開始了一系列機電綜合研究計劃,提出了公共設備管理系統(UMS)的概念,并成功應用到F-22、F-35戰斗機和A380、B787民用客機上。目前,國內飛機電作動技術在舵面驅動上研究較多,但在艙門作動上的研究較少。國內飛機艙門作動系統還處于輔助動力作動階段,例如新舟60、ARJ21艙門均為機械作動。國外飛機貨艙門作動已經由純手動、輔助動力及液壓驅動向電作動發展,例如波音777貨艙門已實現電作動。
在艙門系統的控制方面,中國商用飛機有限責任公司設計的艙門控制設備及控制方法提高了艙門操作的安全性,但對每個艙門仍采用單獨控制器進行控制。這種分散式的控制方法使各艙門獨立存在,與其他的公共設備系統之間沒有信息交互,且大量的控制器、傳感器、執行元件及線纜導致硬件利用率低,飛機體積、重量、功耗增大,可維護性差。整體上國內民用飛機關于電作動艙門系統的集中式控制研究成熟度較低,僅在艙門系統的信號交互方面有相關研究。國外提出的飛機管理系統架構通過高速總線互聯,實現對飛機各系統的集中統一管理。這對艙門控制具有借鑒意義,可將艙門系統通過總線融入到機電設備綜合管理系統,實現對艙門系統的集中式控制。
本文提出一種民用飛機電作動艙門集中式控制方案,對艙門集中控制系統的架構進行設計,簡化艙門系統的復雜度;對集中式控制方案涉及的關鍵問題進行詳細研究,包括總線參與的電機伺服控制設計,借鑒有限狀態機的思想設計多艙門并行控制程序以及可修改感應距離的接近傳感器設計;針對設計架構驗證試驗和電機伺服試驗,對電作動艙門集中式控制方案的可行性進行驗證。
1 艙門集中控制方案
1.1 架構設計
在充分考慮先進民用飛機機電綜合管理的架構方式下,克服分散式艙門控制的弊端,設計的集中式控制方案架構如圖1所示。在該架構下,艙門系統作為一個子系統融入到公共設備管理系統中,與剎車系統、起落架收放系統、環控系統等其他公共設備子系統共同接受機電設備的綜合管理。
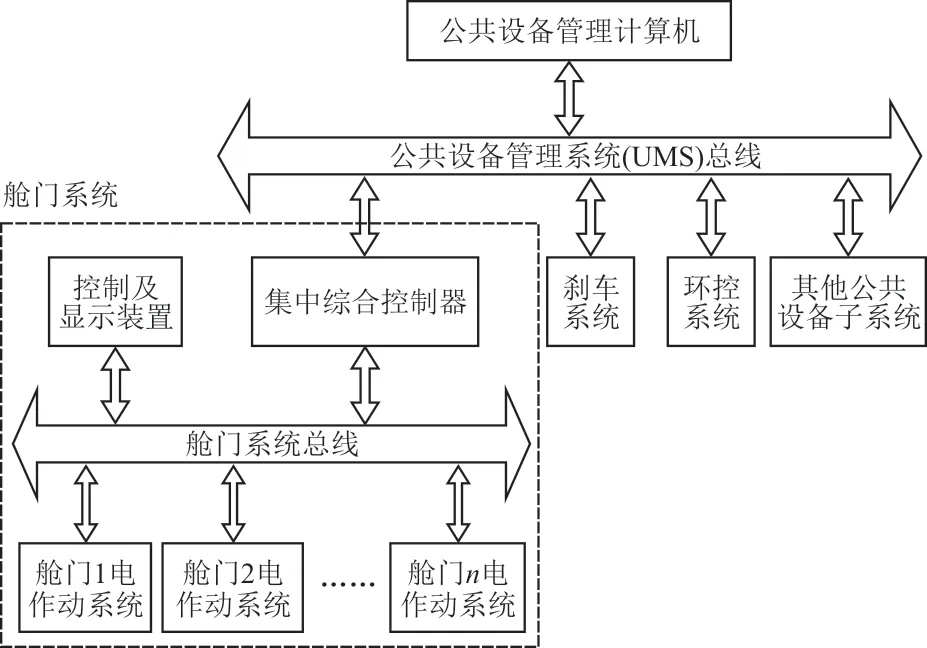
圖1 艙門集中控制系統架構圖Fig.1 Architecture diagram of the centralized control system of the cabin door
艙門集中式控制系統的組成包括:集中綜合控制器、控制及顯示裝置、艙門電作動系統以及艙門系統總線。艙門電作動系統則由艙門控制器、預位電機、閂鎖電機、開啟電機等作動器以及指示到位的接近傳感器組成。
1.2 集中式控制方案原理分析
基于上述集中式艙門控制方案的架構,艙門開啟的流程如圖2所示。控制和顯示裝置將操作人員開啟艙門的控制指令編碼,并發送到艙門系統總線上,集中控制器通過判斷標識符ID接收指令,然后進行邏輯分析并產生有效控制指令,邏輯分析的目的是防止誤操作。有效控制指令發送到艙門系統總線后,對應的艙門控制器判斷標識符并接收信息,經控制律計算驅動閂鎖電機運行,解閂鎖到位后再驅動開啟電機運行。電機運行到位信號由接近傳感器產生,艙門控制器捕獲到位信號后停止驅動電機。電機運行過程中的速度位置等信息經過艙門控制器處理后,經總線反饋回集中控制器,完成對電機的閉環控制。另外,艙門的狀態信息也可以經過總線發送至控制和顯示裝置,指示當前的艙門狀態。電機運行到位后,艙門開啟過程完成。

圖2 艙門開啟流程圖Fig.2 Door opening flow chart
經過上述分析,艙門控制的實質是對電機的控制,由于集中式艙門控制方案增加了集中控制器對整機艙門進行統一調度的過程,因此電機的伺服控制過程有總線參與其中,如何解決這一問題是關鍵。整機多個艙門同時控制,并行運行互不影響的問題也需要解決。另外,針對目前民用飛機艙門傳感器選型混亂多樣的局面,設計感應距離可修改的接近傳感器,有利于統一艙門系統傳感器選型。
綜上,對比傳統分散式艙門控制方案,集中式艙門控制方案具有以下優勢。
(1)采用集中控制器對各艙門作動系統進行統一調度,對艙門的控制管理高度集中化。集中控制器可選擇環境較好的安裝位置,降低電磁干擾影響。
(2)艙門控制器承擔的計算量減少,降低對控制器的性能要求。
(3)采用總線取代點對點通信,大量減少線纜數量,降低系統復雜度,降低經濟成本,提高艙門系統可靠性。
(4)采用感應距離可修改的接近傳感器,選型統一,提高應用靈活性。
2 關鍵問題解決措施
2.1 總線參與的電機伺服控制設計
通常電機的控制過程只由一個控制器完成,但是在集中式艙門控制方案下,由集中控制器綜合管理各艙門控制器,同時考慮到降低艙門控制器的性能要求,集中控制器也承擔了部分控制律的計算。集中控制器計算結果的發送及電機轉速、位置信息的反饋均需要通過總線傳送,針對這一問題本文設計有總線參與的電機伺服控制方案,該控制方案的結構如圖3所示。
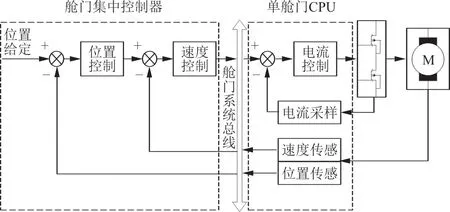
圖3 電機伺服控制方案Fig.3 Motor servo control scheme
由于艙門各電機動作行程為固定角度,同時為保證艙門運行的平穩性,采用電流、轉速、位置三閉環電機伺服控制方案,控制律采用經典PID控制。位置環和速度環的控制由集中控制器完成,由于電流環控制對實時性要求較高,因此電流環控制仍由艙門控制器完成。集中控制器控制律計算的轉速環輸出通過總線發送到艙門CPU作為電流環給定,參與電流環控制律的計算,艙門CPU捕獲的速度和位置信號也通過總線發送給集中控制器,參與速度環和位置環控制律的計算。設置外環控制周期為內環的5~8倍,提高總線利用率。
常用的航電總線類型及特點如表1所示。
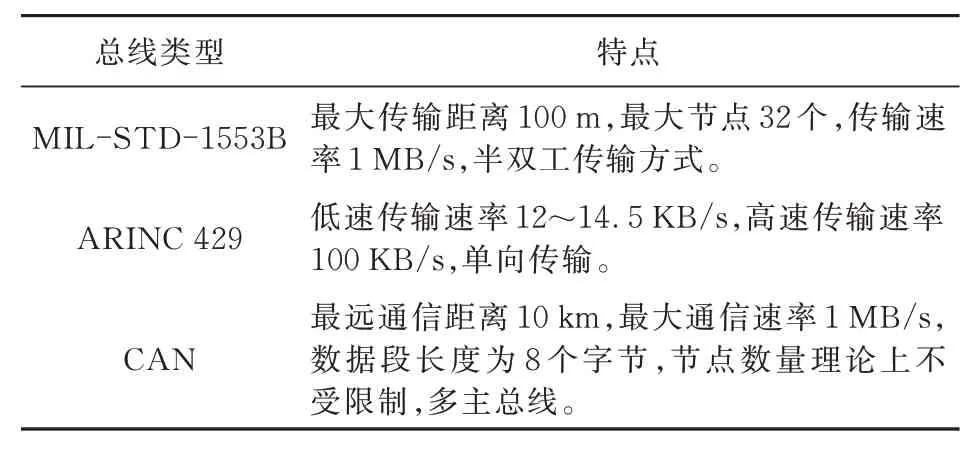
表1 常用航電總線對比Table 1 Comparison of commonly used avionics buses
考慮到可靠性、實時性、抗干擾能力及傳輸距離等因素,選用CAN總線作為集中式艙門控制系統的總線。隨著總線技術的發展,總線通訊速率將進一步提高,電流環控制律計算也可以交由集中控制器完成,艙門控制器只需要完成簡單的通訊功能、電機驅動功能以及傳感器信號采集功能,整個艙門系統的功能更加集中化。
2.2 實現多艙門并行控制的軟件設計
在分散式艙門控制系統下,每個艙門控制器都通過各自的通信線纜單獨控制,艙門之間不存在信息交互,因此各艙門的控制與運行過程是相互獨立的。但是在集中式控制系統中總線取代了點對點通信,整機艙門的控制信號及運行過程中的反饋信號均通過總線傳輸,如何在一個艙門運行占用總線時還能夠同時控制其他艙門,即實現多艙門并行控制的問題需要解決。針對這一問題,本文提出通過軟件設計來解決的方案。
借鑒有限狀態機(FSM)的思想設計的軟件方案如圖4所示,能夠解決集中式艙門控制系統下多艙門的并行控制問題。

圖4 基于有限狀態機的軟件方案Fig.4 Software scheme based on finite state machine
該軟件設計方案是三層狀態機的嵌套,第一層為艙門作動系統層,第二層為艙門作動器層,第三層為控制層。整個狀態機呈現出從待機狀態(IDLE)不斷向下層發散的樹狀結構。該狀態機的特點是,當第一層狀態機的狀態轉移變量從一個艙門轉換到另外一個艙門后,只要該艙門分支下層的狀態轉移變量不變,如果第一層狀態轉移變量再次轉換回該艙門,則狀態機可以承接上一次的運行過程,繼續執行對應電機的控制。通過對該特點的運用,可以解決多艙門的并行控制問題,然而該方法并不是嚴格意義上的同時控制,而是通過狀態機的方式對程序執行過程進行調度,呈現出并行控制的特點。
利用該方法控制艙門作動電機對系統提出時序上的要求:

式中:為電機控制程序的執行時間;為總線數據的收發時間;為電機速度環控制周期。
2.3 感應距離可修改的接近傳感器設計
接近傳感器為艙門作動器的運動提供到位信號,參與艙門作動系統的控制過程。目前應用的接近傳感器大多與接口模塊集成為接近開關,只能檢測靶標距離固定值,因此在艙門控制中針對不同功能需要選擇不同型號的接近開關。為了統一選型并且提高應用的靈活性,設計感應距離值可修改的接近傳感器,其工作原理如圖5所示。

圖5 可修改感應距離的接近傳感器原理圖Fig.5 Schematic diagram of proximity sensor that can modify the sensing distance
在控制器外部擴展一塊電可擦除可編程只讀存儲器(EEPROM)來存儲艙門各作動器到位值。隨著靶標的移動,接近傳感器輸出與靶標距離呈現一定函數關系的模擬信號,在經過信號調理和A/D轉換后與存儲的預設值進行比較,產生“接近”或“遠離”信號。根據以上分析,只需要在軟件中修改感應距離的預設值,就可以實現同一型號的接近傳感器感應不同距離靶標。
3 試驗驗證
3.1 集中式控制方案的架構驗證試驗
集中式控制架構的驗證試驗由上位機、控制器及艙門作動系統模擬裝置組成。上位機基于Lab Windows/CVI設計,負責各控制指令下發及艙門狀態監視;控制器采用TMS320F28335;作動系統模擬裝置由電機帶動金屬擋板運動模擬艙門作動器的運動,由某型號接近傳感器產生到位信號。
模擬控制顯示裝置的上位機界面如圖6所示,艙門作動系統由6個艙門模擬裝置組成,具體如圖7所示。

圖6 上位機界面Fig.6 PC interface

圖7 艙門作動系統模擬裝置Fig.7 Simulating device for cabin door actuation system
試驗時由上位機下發艙門具體作動器的控制指令,指令經過CAN總線被控制器接收后進行邏輯判斷。邏輯判斷的目的是保證正確的操作順序,例如艙門在未解鎖狀態時下發開啟艙門指令,則指令不能被執行。經邏輯判斷為有效的控制指令,能夠發送至艙門作動系統,執行相應動作。電機運行到位后,艙門狀態信息上傳至上位機進行顯示。
試驗中上位機對客艙門4依次發出解鎖、開啟指令,由于當前艙門處于完全關閉狀態,因此指令均被邏輯判斷為有效。鎖電機、開啟電機依次動作,對應的接近傳感器產生到位信號后電機停止運行,模擬裝置開啟到位指示燈亮起顯示該艙門當前狀態,并通過總線將狀態信息上傳到上位機顯示。上位機母面板指示當前4個艙門處于可靠關閉狀態,而客艙門4處于禁止起飛狀態。觀察客艙門4的子面板,指示當前艙門解閂、開啟到位。該艙門作動器模擬裝置的試驗結果如圖8所示,上位機界面的試驗結果如圖9~10所示。

圖8 模擬裝置試驗結果Fig.8 Experimental results of the simulation device

圖9 上位機試驗結果Fig.9 Experimental results of the PC

圖10 上位機試驗結果Fig.10 Experimental results of the PC
綜上所述,在集中式艙門控制方案的架構下,艙門控制裝置的指令能通過總線正確發送到艙門控制器,艙門控制器能解碼并執行動作,且顯示裝置能正確指示當前的艙門狀態信息。
另外,上位機同時發送多個艙門控制指令,各艙門作動模擬裝置均能正確動作,驗證實現多艙門并行控制的軟件設計的正確性。通過上位機修改接近傳感器感應距離預設值,能夠實現電機帶動擋板停止在不同位置,說明所設計的感應距離可修改的接近傳感器的可行性。
3.2 集中式控制下電機伺服試驗驗證
集中式艙門控制方案下的電機伺服試驗裝置平臺,采用TMS320F28335為集中控制器,艙門控制器采用DSP28035,控制和顯示面板的模擬用上位機設計,系統總線采用CAN總線,艙門作動電機選用無刷直流電機,電機的運行過程則通過磁粉制動器加載模擬。試驗裝置如圖11所示。
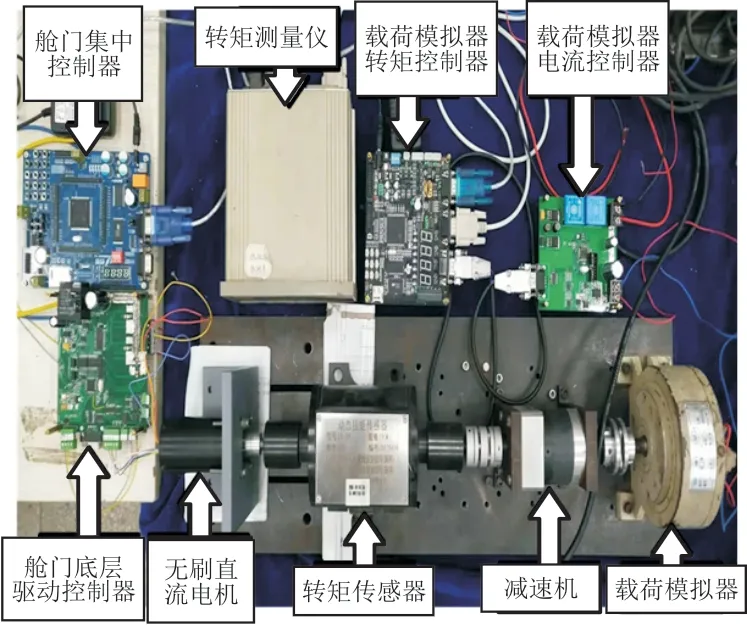
圖11 驗證試驗平臺Fig.11 Simulation experiment platform
試驗過程如下:上位機發出艙門開啟或關閉指令,集中控制器接收到動作指令后按照位置給定曲線開始執行位置環和轉速環控制律的計算,并將計算結果發送至CAN總線,艙門控制器接收計算結果后作為電流環給定,進行電流環控制律計算,驅動并控制電機開始帶載運行;載荷模擬器通過轉矩控制器和電流控制器加載,模擬艙門運行過程中作動電機的帶載情況;電機位置和轉速信息則通過無刷直流電機的霍爾傳感器反饋,反饋值通過CAN總線按照設定的頻率發送回集中控制器,構成閉環完成對電機的伺服控制。
試驗以艙門某作動電機要求30 s內轉動(100±2)°,行程范圍為20°起始至120°到位為例。考慮到作動機構不同角度位置及風載,電機運行過程中的負載時刻變化,電機行程范圍內各位置對應的負載大小已給定,如圖12所示。

圖12 電機負載曲線Fig.12 Motor load curve
將滿足上述要求的曲線作為位置給定,通過在集中控制器中設置數組表示該曲線。電機運行過程中控制器將電機位置、轉速信息實時上傳至上位機顯示。試驗結果的電機位置跟蹤如圖13所示,轉速跟蹤如圖14所示。

圖13 位置給定與反饋曲線圖Fig.13 Position setting and feedback curve diagram

圖14 轉速給定與反饋曲線圖Fig.14 Speed setting and feedback curve diagram
從圖13~圖14可以看出:電機在30 s時由20°運行至119.3°,滿足30 s內運行(100±2)°的指標要求,且反饋曲線顯示電機位置及轉速跟蹤效果良好。該試驗結果表明本文設計的集中式艙門控制方案,能夠實現對艙門作動電機的伺服控制,且控制效果良好,初步證明了集中式艙門控制取代分散式艙門控制的可行性。
4 結 論
(1)綜合未來民用飛機的發展趨勢,本文提出的電作動艙門集中式控制方案使得艙門系統的控制更加集中化,并且可以將艙門系統融入到機電設備綜合管理系統中。
(2)該方案采用總線取代傳統點對點通信,極大地減少了線纜數量,降低了艙門系統復雜度,提高了系統經濟型、可靠性和可維護性。
