基于多平臺信息融合的船舶導航技術
2022-08-09 10:09:34沈庭鈞
造船技術 2022年3期
沈庭鈞
(滬東中華造船(集團)有限公司,上海 200129)
0 引 言
近年來,全球航運規模持續擴大,據統計,2019年全球營運船舶總數量超過9.5萬艘(總噸位在100以上的有推動船舶),如此龐大的數量可保障全球海上運輸,但會增加航行安全風險。作為航行安全的重要保障,船舶導航技術的應用可為船舶航行提供準確的數據支持,依托綜合導航系統對多平臺信息的綜合處理,可有效提高導航信息的可靠性和實時性,減少船舶航行安全事故的發生。
1 船舶導航技術發展概述
導航技術是人類在二維與三維空間探索中不會迷失方向的重要前提,船舶導航技術的發展使人類邁向大洋深處。船舶導航技術經歷如下發展階段:
第一階段:經驗導航階段。經驗導航是根據對天文和地理等特殊現象的總結,經陸上長期驗證所使用的導航技術,如星象導航和地磁導航等,并利用相應原理研究制造六分儀、星象儀、計里鼓、司南和磁羅經等。經驗導航主要是對航向的大致估算,不僅精度低,而且較易受到外部環境因素影響,僅可滿足短距導航需求。
第二階段:機械導航階段。在近代導航技術的發展過程中,機械導航起到重要的承上啟下作用,主要利用機械陀螺在高速轉動下的指北特性確定航向,同時借助機械式計程儀(如航海表等)進行距離測算,在海圖上確定船舶的大致位置[1]。機械導航技術精度明顯提升,且受環境因素影響較小,在遠洋航行中得到廣泛應用,如電控陀螺羅經、平臺羅經和航海表等。
第三階段:電子信息導航階段。電子信息技術在導航領域的應用改變傳統導航模式,多元化的電子信息導航設備提供更加全面的導航信息,如船用雷達導航系統(Radar Navigation System,RNS)、光學慣性導航系統(Inertial Navigation System,INS)、多普勒計程儀(Doppler Velocity Log,DVL)和船舶自動識別系統(Automatic Identification System,AIS)等。綜合導航技術的發展實現對多元平臺導航信息的融合與管理,為實現船舶自動化和智能化奠定基礎。
2 基于多平臺信息的船舶導航技術分析
2.1 船用RNS與船舶AIS信息融合技術
RNS與AIS是船舶導航系統中較為關鍵的2種無線電導航設備,從實際使用效果來看,船用RNS與船舶AIS的信息融合可實現船舶航行態勢的整體感知,并可進行高低搭配,保證船舶航行安全。
2.1.1 船用RNS
船用RNS基于傳統無線電導航技術發展而來,早期船用RNS技術原理相對簡單,依靠微波天線可對周圍一定范圍內的船舶和島嶼(或礁石)進行粗略的方位和距離測算[2]。依托現代雷達技術的日益成熟,裂縫天線成為船用RNS的標配,船用RNS計算機軟件系統可同時對包括方位、距離、航向和航速等在內的目標數據進行計算,甚至可根據母船導航數據計算最近會遇距離(Distance to Closest Point of Approach,DCPA)和最近會遇時間(Time to Closest Point of Approach,TCPA),其中:自動雷達標繪儀(Automatic Radar Plotting Aid,ARPA)較具有代表性,可減輕航海部門人員的工作壓力,為船舶航行提供更高的安全保障。
2.1.2 船舶AIS
船用RNS存在不足,近距離約有0.7 n mile的盲區,這為特殊航行區域內的船舶安全帶來隱患,而船舶AIS的應用則可解決該問題。船舶AIS是基于甚高頻(Very High Frequency,VHF)技術組建的區域導航網絡體系,通過在系統軟件中設置的識別信息,所有安裝該系統的船舶均可及時獲取有效通信距離內的其他船舶信息,包括航向、航速、船名、船籍和船型等,利用系統自帶軟件計算所處環境的風險級別,并可及時進行危險預警。船舶AIS具有電子海圖功能,可幫助航海部門對海上航線和危險區域等進行顯示,并結合全球定位系統(GPS)進行船舶定位,提高船舶導航數據精度。
2.1.3 船用RNS與船舶AIS信息融合技術
船用RNS是以所在船舶為基準,對探測范圍內的其他船舶進行相對航向、航速和距離的探測,在排除羅經等導航設備提供的基礎航向后,船用RNS的航向并不具有實際意義[3]。早期船用RNS僅可實現碰撞預警功能,即便是現在,以ARPA為代表的船用RNS在功能上依然需要大量的外部信息才可實現,而船舶AIS可解決這一問題。船用RNS與船舶AIS組成如圖1所示。
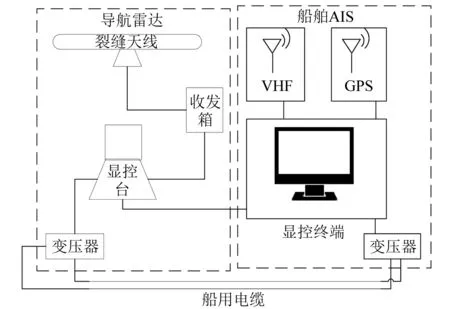
圖1 船用RNS與船舶AIS組成框圖
船用RNS與船舶AIS的信息融合使導航系統信息更加豐富,船用RNS可利用船舶自動導航系統中的GPS數據進行航跡向的推算,即通過相同時間間隔內連續兩點A和B的經緯度(x1,y1)與(x2,y2)可得出其大致航向θ,具體推算公式如下:
θ=arccos[cosy1cosy2cos(x2-x1)+siny1siny2]
(1)
利用該航跡向,不僅解決船用RNS的真航向問題,而且可將該航向用于目標船舶的航行數據計算,計算數據與船舶AIS進行比對,以確保數據的準確性。船舶AIS可將0.7 n mile半徑內的船舶信息發送至船用RNS,有效避免因盲區導致的復雜水域航行安全問題。
2.2 傳統導航設備的信息融合技術
傳統導航設備主要是指光學羅經、電控羅經、磁羅經和計程儀等。隨著電子信息技術的不斷發展,傳統導航設備已實現多元信息融合,成為船舶導航系統基準數據的來源之一。
2.2.1 羅 經
目前,船用羅經主要分為光學羅經、電控羅經和磁羅經等3種類型。3種羅經在核心器件上差別明顯,但基本原理相似。在導航數據和精度方面,磁羅經僅可提供航向信息,且精度最低;電控羅經可提供航向信息和姿態信息,精度居中;光學羅經可提供航向信息和姿態信息,精度最高。
2.2.2 計程儀
計程儀利用水對目標物力的作用實現船舶航行速度的測量,并通過對速度的積分計算船舶航程。早期計程儀分為拖曳式和轉輪式,其技術原理較為簡單,誤差相對較大,對遠距離航行并不適用。隨著水壓計程儀、電磁計程儀和DVL的出現,壓力傳感器技術、電磁感應技術和水聲技術得到廣泛應用,通過傳感器將水流產生的壓力信號轉變為電信號,在濾波和放大環節后可減少外部干擾,經模數轉換后對數字信號進行計算,最終得到船舶航速與航程。以電磁計程儀為例,其數據具有較好的線性特征,對船體速度變化敏感,通過水流(導體)切割安裝在船體底部中軸線上的電磁傳感器形成感應電壓(或感應電流),并利用模數轉換將其轉換為船舶航速,經積分后可得到船舶航程信息。
2.2.3 傳統導航設備的信息融合技術
在羅經和計程儀等傳統導航設備的實際使用過程中發現:受多種干擾因素的影響,獨立工作狀態的傳統導航設備所提供的航向、航速和航程等信息誤差不斷增加,對于需要長期連續航行的遠洋船舶來說存在較大安全隱患[4]。針對這一問題,在完善相關算法的基礎上,將導航數據進行融合處理,即組合導航系統,可提高導航數據的可靠性。
組合導航系統的出現結束長期以來導航裝備相互獨立運行的狀態。狹義上的組合導航系統是指以羅經為核心的INS,而廣義上的組合導航系統則是由多類型導航裝備組成的數據綜合處理系統。將INS作為組合導航系統的核心,是由于INS所提供的數據精度最高,具有可參照性。組合導航系統組成如圖2所示,其中:勞蘭(Loran)為音譯名,為long range navigation(遠程導航)系統的縮寫。
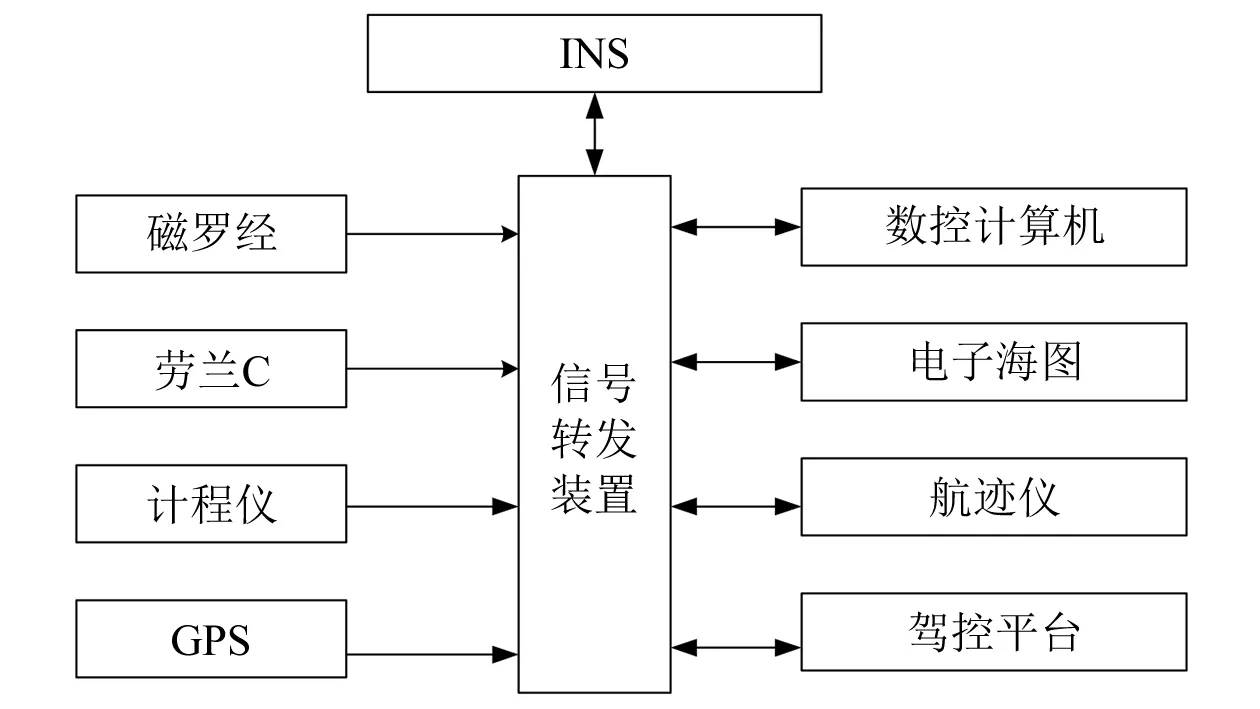
圖2 組合導航系統組成框圖
組合導航系統的實現主要采用最優估算法,其中卡爾曼濾波法的應用較為廣泛。與維納濾波等其他濾波方式相比,卡爾曼濾波對信號質量并未進行明確要求,通過對復合信號(真實信號與噪聲的疊加信號)的處理,得出誤差最小的真實信號的估計值。基于該算法的應用,組合導航系統功能如下:
(1)復合精度提升功能。真實信號來源的增加可弱化噪聲對真實信號帶來的干擾,提高真實信號估算精度。
(2)測量冗余功能。在導航系統中對同一數據存在重復測量現象,即存在測量冗余,樣本數量的增加可提高計算結果的可靠性,并有利于排除樣本中的“野值”對卡爾曼濾波計算結果造成的影響[5]。
2.3 基于多平臺信息融合處理的綜合導航系統
船用導航裝備類型的豐富與數量的增加在一定程度上提高船舶航行的安全性,但導航系統數據量的增加會提高數據處理難度。為實現導航數據的統一管理,提出綜合導航系統概念。
2.3.1 綜合導航系統功能及組成
綜合導航系統是現代遠洋船舶的標配之一。與傳統導航系統或平臺相比,綜合導航系統是導航技術、計算機技術、網絡技術、信息融合技術、無線電技術和衛星通信技術等多種先進技術的集成。綜合導航系統通過接收外部導航終端發送的信息,并根據信息類型對相同信息進行計算,完成目標信息的二次融合,使原本復雜的導航信息更加直觀,精度明顯提高。綜合導航系統組成如圖3所示。
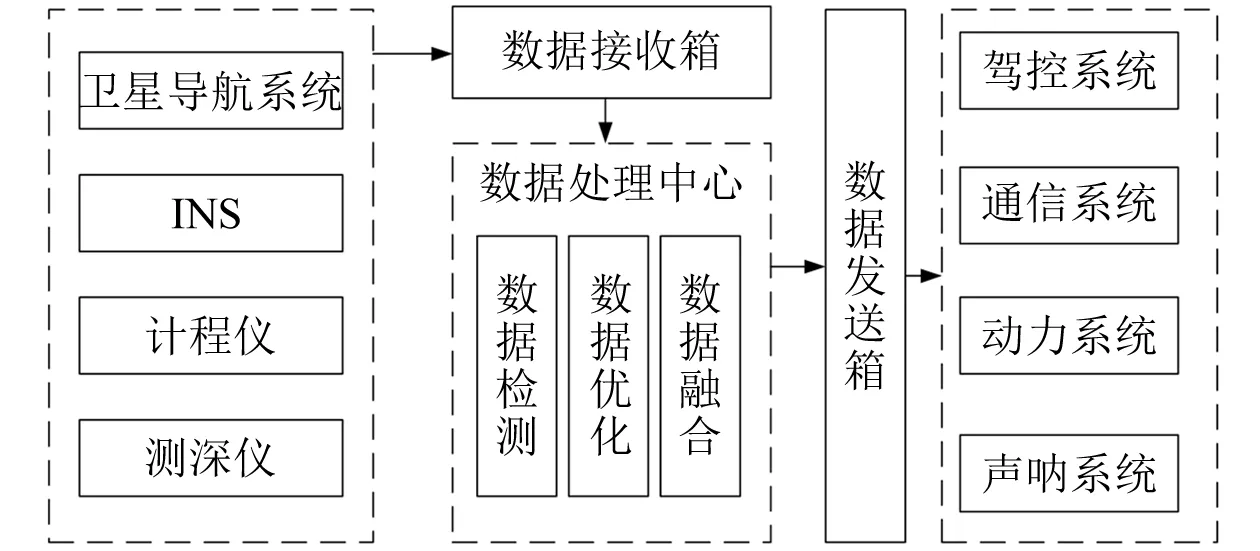
圖3 綜合導航系統組成框圖
綜合導航系統幾乎涵蓋所有與導航相關的設備,不僅包括輸出導航信息的設備,而且包括眾多需要依托導航信息才可正常工作的系統,如駕控系統、通信系統、動力系統和聲吶系統等。綜合導航系統的核心是數據處理中心,通過數據檢測技術、數據優化技術和數據融合技術,完成對多平臺信息的高效利用,使導航信息更加真實、可靠。
2.3.2 數據檢測技術
綜合導航系統數據處理中心在接收導航信息后,需要對數據的有效性進行分析,減輕下一階段數據優化的壓力。針對綜合導航系統常見的數據單點異常、關聯異常和集體異常等3種現象,在此過程中采用的導航數據檢測技術主要為如下3種:
(1)聚類檢測技術。由于在導航系統中異常數據的產生大多具有一定的規律性,因此在數據檢測過程中可對某一異常數據的特征進行分析,并將具有與該特征高度相似的數據進行歸類[6]。聚類檢測技術的應用雖可提高檢測效率,但由于無法對導航信息影響因素的關聯性進行明確,因此在實際使用中對數據源的穩定性和可靠性要求較高,無法適用于復雜噪聲環境下的導航數據檢測。
(2)偏差檢測技術。通過對海量導航數據進行分析,并在此基礎上構建對應數據的仿真模型,進行數據仿真結果比對,計算數據偏差是否在閾值范圍內,確定綜合導航系統所接收的導航信息的準確性。基于數學模型的偏差檢測技術精度高,但綜合導航系統數據量較大,數據模型仿真存在明顯的滯后性。
(3)概率相關技術。綜合導航系統所接收的導航數據來自不同的導航設備,部分異常數據之間存在一定的相關性,對某一數據的異常現象可通過具有相關性的導航數據進行體現。數據之間的相關性越高,則數據同步異常的概率越高。例如,船用INS的速度v和航程x的信息通過加速度計實時數據積分而來,如圖4所示。
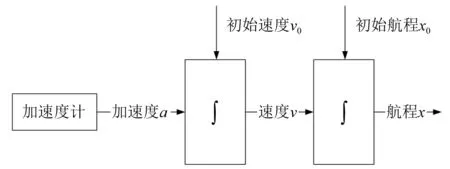
圖4 INS的速度和航程積分示例
若不考慮外部干擾的影響,則速度v和航程x的公式為
(2)
(3)
式(2)和式(3)中:t為時間。
INS的加速度是航速和航程的元數據,三者之間為100%相關,一旦加速度數據異常,則直接導致INS輸出航速和航程數據異常。通過概率相關技術,可提高數據異常的檢測效率,保證數據的可靠性。
2.3.3 數據融合技術
傳統導航系統強調導航數據的真實性,即根據導航設備的數據精度確定導航系統的數據來源,由此減輕導航系統在數據處理方面的壓力。隨著計算機技術的不斷發展,計算機數據處理能力明顯提高,這為數據融合技術在綜合導航系統中的應用奠定基礎。
綜合導航系統數據融合技術對一切具有實用價值的導航信息進行采集、傳輸、綜合、過濾、相關和合成,輔助完成環境態勢判定、任務規劃和故障診斷等相關工作,具體可分為數據層融合、特征層融合和決策層融合,其中數據層融合和特征層融合的使用較為廣泛[7]。以航向數據為例,綜合導航系統航向數據來自INS、GPS(航跡向)、北斗系統(航跡向)和船舶AIS(航跡向)。綜合導航系統在接收對應數據后,通過比對航向數據之間的差值,結合駕控系統實際航向變化趨勢,在實時數據的基礎上進行誤差在線修正和加權平均,修正的數據作為綜合導航系統的航向真值。
在實際使用中,綜合導航系統集成電子海圖和航跡儀等多種功能,可實現與船用RNS、船舶AIS的目標融合,實際效果如圖5所示,其中:①、②和③分別為船用RNS A、船用RNS B和船舶AIS所提供的目標方位;在結合氣象儀、GPS、計程儀和激光測距儀等相關平臺信息進行目標融合后,綜合導航系統最終顯示融合目標方位④。
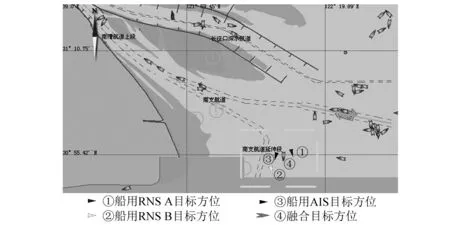
圖5 多平臺信息的融合示例
3 基于多平臺信息的船舶導航技術發展趨勢
3.1 船舶導航技術的智能化
在全球船舶運輸行業持續發展及海上船運數據網絡日益完善的情況下,船舶導航數據的智能化將成為現實。通過人工設定導航數據,船舶可通過衛星接收岸基綜合管理平臺的統一調配和管理。智能導航系統可根據航行區域的實際情況,結合航速和航向等數據,保持與其他船舶的安全距離,可針對航行區域內存在的安全風險向岸基綜合管理平臺預警,并采取有效的規避措施,避免航行安全事故發生。
3.2 船舶導航技術的網絡化
船舶導航技術的網絡化包括內、外兩個方向。內部網絡化是指船舶導航設備之間通過局域網進行數據傳輸,實現導航數據的實時傳輸,規范導航數據格式,提高數據處理效率[8]。外部網絡化是指構建區域海洋導航數據網絡,利用大數據網絡技術為船舶導航數據融合處理提供跨平臺數據參考,在此過程中可依托船舶之間的導航信息進行區域航行數據的異常檢測,并對區域范圍內的船舶航行數據誤差進行整體修正,提高船舶航行數據的可靠性和準確性。
4 結 語
船舶導航技術水平的不斷提升為船舶遠洋航行提供保障,針對船舶導航設備多元化發展的現狀,應促進多平臺信息的綜合處理與融合,充分利用數據優勢,構建更加精準、實時和系統的船舶航行安全保障模式。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
今日農業(2021年19期)2022-01-12 06:16:36
船舶(2021年4期)2021-09-07 17:32:22
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00