半潛浮式風機的動力響應分析
2022-08-09 11:27:24張培智
造船技術 2022年3期
張培智
(江蘇科技大學 船舶與海洋工程學院,江蘇 鎮江 212003)
0 引 言
當今海上風電已成為新能源中較具開發條件和較有發展前景的發電方式,半潛浮式風機因其適用于深海、綜合性能佳等優點已逐漸成為海洋工程界研究的熱點。美國國家可再生能源實驗室(NREL)研發的三浮筒半潛風機OC4-DeepCwind和葡萄牙WindFloat半潛風機項目因各自的浮式基礎型式特點被人所熟知。對于半潛浮式風機來說,浮式基礎的型式是較為重要的。
文獻[1]~文獻[3]基于勢流理論研究僅考慮波浪載荷情況下的WindFloat三立柱無中心立柱式浮式風機基礎的水動力性能。文獻[4]和文獻[5]基于葉素理論與勢流理論對有中心立柱的三立柱式OC4和WindFloat風機浮式基礎進行在風載荷和波浪載荷線性疊加下的時域運動響應分析。文獻[6]和文獻[7]基于水動力-空氣動力-系泊系統的耦合對浮式風機的動力響應進行研究。但目前還比較缺乏半潛浮式風機在不同浮式基礎結構型式下的全耦合動態響應分析。因此,結合OC4和WindFloat半潛浮式風機的基礎結構型式,設計一種擁有新型半潛浮式風機基礎型式的浮式風機OC4-WindFloat,并對其進行水動力全耦合分析。
1 海洋環境載荷及半潛浮式風機運動理論
1.1 風載荷
目前,對于風機葉片所受風載荷的計算主要使用葉素-動量理論[8]進行考慮。葉素理論將葉輪假想為可沿其展向分成無限個互相獨立的微段,并且在每個微段上的流體運動互不干擾。此時葉素被近似為二元翼型,而葉輪所受推力及轉矩可通過對葉素所受外力和轉矩在其展向積分得到。在每個葉素上的軸向推力和轉矩分別為
dT=CnNbcdrρ1W2/2
(1)
dM=CtNbcrdrρ1W2/2
(2)
式(1)和式(2)中:Cn為法向力系數;Nb為葉片數量;c為葉素弦長;r為任意一點與輪轂之間的距離;ρ1為空氣密度;W為葉素相對風速矢量的大小;Ct為切向力系數。對上式沿軸向積分可得到作用在整個葉輪上的推力T和轉矩M。
1.2 半潛浮式風機波浪載荷
半潛浮式風機基礎的各個立柱由細長結構的橫撐互相連接,使用HydroD模塊基于水動力理論對風機基礎進行頻域水動力計算,對各個立柱使用勢流理論計算其波浪載荷,而各個細長桿件橫撐則采用莫里森公式計算其波浪載荷。莫里森公式將波浪載荷描述為波浪流體加速度產生的慣性力和黏性產生的摩擦力之和,其具體方程的微分形式如下:

(3)

對于浮式基礎的各浮筒波浪載荷,使用多體水動力勢流理論將每個浮筒視作單獨的浮體進行波浪擾動力和輻射力的計算。除上述載荷外,浮筒還受到波浪和海流的黏性拖曳力作用,這一部分受力使用莫里森公式中對于黏性力的計算方法進行表達:
(4)

1.3 半潛浮式風機運動理論
海上浮式風機在風浪作用下的運動方程如下:
(5)

2 OC4-WindFloat半潛浮式風機結構
OC4半潛浮式風機結構[9-10][見圖1(a)]和WindFloat半潛浮式風機結構[11][見圖1(b)]均由頂部風機、塔架、浮式基礎和系泊系統組成。OC4半潛浮式風機基礎是四立柱浮式結構,頂部風機安裝在中心立柱上;而WindFloat半潛浮式風機基礎是三立柱浮式基礎結構,頂部風機安裝在邊立柱上。WindFloat和OC4半潛浮式風機都各有優缺點:WindFloat半潛浮式風機基礎的垂蕩板結構比OC4減搖效果更好,但設計水深不到100 m,不適合深海區域;WindFloat半潛浮式風機只適合葡萄牙地區,依據當地安裝地點風向特點,多為往復型而不是360°,三立柱式最不利工況在90°方向,此時通過壓載水調節,可將風機控制在10°以內,該基礎型式在布置方向上有一定要求;OC4半潛浮式風機基礎排水量大、吃水深,基礎型式復雜且建造成本高,壓載水調節比WindFloat更麻煩一些。
設計一種擁有新型半潛浮式風機基礎型式的浮式風機OC4-WindFloat[見圖1(c)]。新型OC4-WindFloat半潛浮式風機采用與OC4半潛浮式風機相同的頂部風機、相近的設計吃水及排水量,而浮式基礎型式參考WindFloat半潛浮式風機。與WindFloat相比有更深的設計吃水,綜合適應性能比WindFloat要好;與OC4相比,基礎型式的改變使制造成本比OC4半潛浮式風機要低。OC4、WindFloat和OC4-WindFloat半潛浮式風機結構主參數如表1所示。

圖1 3種半潛式浮式風機結構示例

表1 OC4、WindFloat和OC4-WindFloat半潛浮式風機結構主參數
3 風浪耦合響應下的半潛浮式風機水動力性能數值模擬分析
為合理研究OC4-WindFloat半潛浮式風機的水動力性能,對OC4半潛浮式風機進行基于風浪耦合響應的頻域水動力和數值模擬分析,將固有周期計算結果與文獻[10]中的試驗數據進行對比研究,在數值模擬與試驗結果相一致的基礎上,進行基于風浪耦合下的OC4半潛浮式風機時域動態響應計算分析,以相同求解方法求解OC4-WindFloat半潛浮式風機的固有周期及動態響應計算結果。
3.1 OC4半潛浮式風機頻域水動力數值分析
3.1.1 OC4半潛浮式風機水動力有限元模型
OC4半潛浮式風機設計水深為 200 m,海水密度為1.025×103kg/m3,吃水為20 m,排水量約13 500 t。采用挪威船級社(DNV)的船舶與海洋工程軟件SESAM建立OC4半潛浮式風機基礎的水動力模型,如圖2(a)所示。濕表面模型和莫里森模型網格大小為2 m,共有2 401 個節點和 2 395個單元,如圖2(b)和圖2(c)所示。

圖2 OC4半潛浮式風機水動力有限元模型
3.1.2 OC4半潛浮式風機運動響應
通過計算得到OC4半潛浮式風機在0°~180°(步長為30°)浪向角下,0.1~2.5 rad/s(間隔0.1 rad/s)頻率范圍內的縱蕩、橫蕩、垂蕩、橫搖、縱搖和艏搖,即沿x、y和z軸方向的移動和繞這3個坐標軸轉動的運動響應值結果,如圖3所示,其中:RAO(Response Amplitude Operator)為響應幅值算子。

圖3 OC4浮式半潛風機運動響應
由圖3可得:
(1)縱蕩和橫蕩運動響應振幅隨波浪頻率的增大逐漸減小。垂蕩運動響應隨波浪頻率的增大,先增大后減小,垂蕩方向的波浪頻率敏感區間為0.2~0.4 rad/s,極值點的波浪頻率為0.3 rad/s。
(2)橫搖和縱搖運動響應值曲線趨勢相似,先減小后增大再減小,波浪頻率敏感區間為0.5 ~1.0 rad/s。艏搖方向波浪頻率敏感區間為0.7~1.3 rad/s,極值點的波浪頻率為1.0 rad/s。
3.2 風浪耦合響應下的OC4半潛浮式風機時域動態響應分析
為了對設計的OC4-WindFolat半潛浮式風機進行較為合理的水動力性能分析,對OC4半潛浮式風機固有周期及六自由度運動響應進行數值模擬研究,并與文獻[10]中的試驗和數值模擬結果進行對比分析。
3.2.1 OC4半潛浮式風機固有周期數值模擬分析
通過計算,OC4半潛浮式風機在六自由度方向的固有周期及與文獻[10]中的試驗結果如表2所示。由表2可知:計算結果與文獻[10]中的試驗結果誤差百分比約5%,因此,半潛浮式風機的固有周期數值模擬方法是合理的。
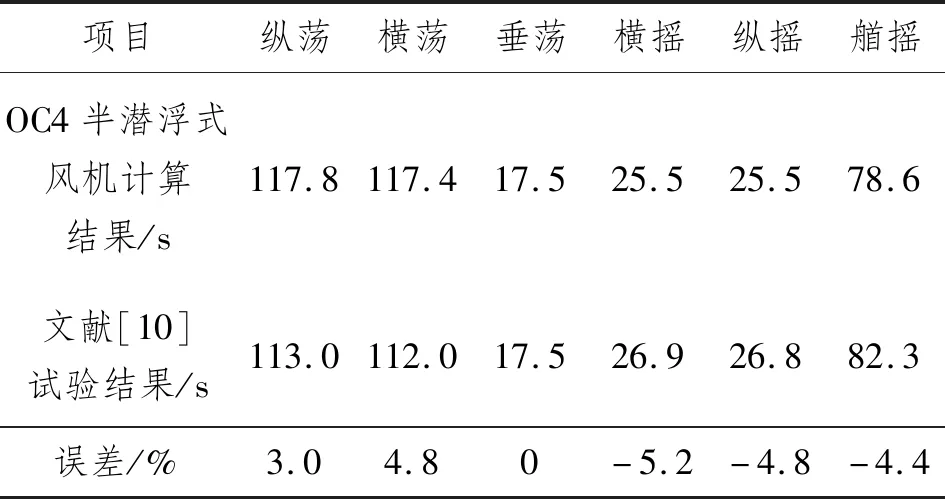
表2 OC4半潛浮式風機固有周期計算結果與文獻[10]中的試驗結果對比
3.2.2 OC4半潛浮式風機時域動態響應分析
由于OC4半潛浮式風機的設計水深為200 m,因此適用于我國南海海域。根據南海海域海洋氣象資料[12]和海洋環境條件DNV-ST-0437[13],風譜采用美國石油協會(API)風譜,擬定極端工況平均風速為25.0 m/s,運行工況平均風速為11.4 m/s。波浪譜采用JONSWAP譜,擬定極端工況波高為10 m,譜峰周期為6 s;運行工況波高為3 m,譜峰周期為10 s。OC4半潛浮式風機在南海海域時的極端工況和運行工況如表3所示。

表3 OC4半潛浮式風機在南海海域的部分設計工況
OC4半潛浮式風機會受到風機載荷和隨機波浪載荷的共同作用,所以基于SIMO和RIFLEX對半潛浮式風機整體系統進行耦合動力響應計算。分析的時間總長為1 800 s,時間步長為0.02 s,風浪方向同向,沿x軸(0°方向)正對頂部風機。六自由度的運動響應在極端工況和運行工況條件下的結果如表4和表5所示。

表4 OC4半潛浮式風機極端工況六自由度運動響應

表5 OC4半潛浮式風機運行工況六自由度運動響應
根據相關規定,浮式平臺的橫縱蕩運動位移一般不超過水深的5%~6%,垂蕩運動幅值不超過±(2.0~3.0)m,由于浮式風機平臺上無人居住,因此對其水平和垂蕩運動的要求可適當放寬。OC4半潛浮式風機設計水深為200 m,因此橫縱蕩運動一般不超過10~12 m[14]。浮式風機在正常發電情況下,縱搖運動均值(平均俯仰角)需在±5°內,而最大值(動態俯仰角)需在±15°內[15]。
由表4和表5可知:OC4半潛浮式風機的橫蕩、垂蕩、橫搖和艏搖運動響應較小,而縱蕩和縱搖運動響應較為明顯;在極端和運行工況條件下,縱蕩運動最大值分別為9.510 m和8.120 m,垂蕩運動的最大值分別為0.863 m和0.492 m;在運行工況條件下,縱搖運動均值(平均俯仰角)為2.803°,而最大值(動態俯仰角)為4.985°。因此,OC4半潛浮式風機相關運動響應滿足要求。
3.3 風浪耦合響應下的OC4-WindFloat半潛浮式風機時域動態響應分析
3.3.1 OC4-WindFloat半潛浮式風機固有周期數值模擬分析
通過計算,OC4-WindFloat半潛浮式風機在六自由度方向下的固有周期計算結果如表6所示。

表6 OC4-WindFloat半潛浮式風機固有周期計算結果 s
3.3.2 OC4-WindFloat半潛浮式風機時域動態響應分析
對OC4-WindFloat半潛浮式風機進行在極端和運行工況條件下的時域動態響應分析,設計工況如表4所示,六自由度的運動響應在兩種工況條件下的結果如表7和表8所示。

表7 OC4-WindFloat半潛浮式風機極端工況六自由度運動響應

表8 OC4-WindFloat半潛浮式風機運行工況六自由度運動響應
由表7和表8可知:OC4-WindFloat半潛浮式風機的橫蕩、垂蕩、橫搖和艏搖運動響應較小,而縱蕩和縱搖運動響應較為明顯;在極端和運行工況條件下,縱蕩運動最大值分別為10.272 m和9.060 m,垂蕩運動最大值分別為1.325 m和0.804 m;在運行工況條件下,縱搖運動均值(平均俯仰角)為3.382°,最大值(動態俯仰角)為6.292°。根據文獻[14]和[15],OC4-WindFloat半潛浮式風機運動響應滿足相關要求。
4 OC4-WindFloat與OC4固有周期及動態響應對比分析
4.1 固有周期
OC4-WindFloat與OC4半潛浮式風機固有周期如圖4所示。由圖4可知:OC4-WindFloat與OC4半潛浮式風機的縱蕩、橫蕩和艏搖固有周期比較接近,這是因為2個浮式風機基礎型式雖有所不同,但采用的系泊系統較為一致,而縱蕩、橫蕩和艏搖的恢復力主要由系泊系統提供;橫搖、縱搖和垂蕩固有周期有差異的原因是浮式基礎的型式不同。
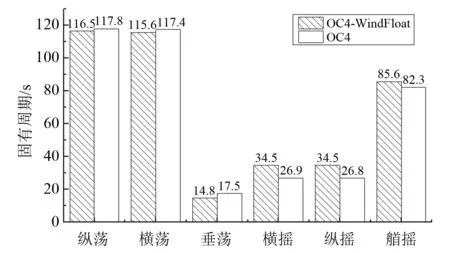
圖4 OC4-WindFloat和OC4半潛浮式風機固有周期對比分析
4.2 動態響應
OC4-WindFloat與OC4半潛浮式風機最大位移動態響應如圖5和圖6所示。由圖 5和圖6可知:對于極端工況和運行工況,在縱蕩、橫蕩和艏搖方向上OC4-WindFloat和OC4半潛浮式風機位移響應幅值比較相近,這是因為2個風機采用相同系泊系統,而系泊結構物的低頻運動響應很大程度上受到系泊系統剛度和阻尼的影響;對于極端工況和運行工況,橫搖、縱搖和垂蕩3個方向的運動響應幅值有一定差值,一是由于浮式基礎型式差異引起靜水回復剛度與黏性阻尼的差異,二是由于不同浮式風機基礎受到波頻力、平均漂移力和緩變漂移力等高階力的作用不同。

圖5 OC4-WindFloat和OC4半潛浮式風機極端工況最大位移響應

圖6 OC4-WindFloat和OC4半潛浮式風機運行工況最大位移響應
5 結 論
對OC4-WindFloat半潛浮式風機的基礎結構型式進行設計,對其固有周期及動態響應進行數值模擬分析,并與文獻中的OC4半潛浮式風機進行結果對比研究,得到如下結論:
(1) OC4-WindFloat半潛浮式風機結構結合OC4與WindFloat 半潛浮式風機基礎型式的特點,由于基礎借鑒WindFloat半潛浮式風機,沒有中心立柱,與OC4相比建造成本低;由于其沿用OC4基礎浮筒型式,因此其適用水深比WindFloat更佳。
(2)OC4-WindFloat與OC4半潛浮式風機縱橫蕩和艏搖固有周期及位移動態響應相接近,而縱橫搖和垂蕩固有周期及位移動態響應有差異,這主要是由于相同的系泊系統、不同的基礎結構型式及上部風機安裝位置不同所造成。