基于ADS-B 的通用航空監視系統規劃
2022-08-06 10:14:12耿文博
科技創新與應用 2022年22期
耿文博,董 兵
(中國民用航空飛行學院,四川 廣漢6 183000)
自民航局印發《通用航空發展“十三五”規劃》以來,我國通用航空產業在國家戰略形勢的促進下高速發展。根據2021 年6 月中國民用航空局發布的《2020年民航行業發展統計公報》,截至2020 年底,獲得通用航空經營許可證的通用航空企業523 家;通用航空在冊航空器總數達到2 892 架;新增通用機場93 個,全國在冊管理的通用機場數量達到339 個。
根據近幾年的通用航空發展情況(圖1)可以看出通用航空企業和通用機場數量在穩步增長。結合當前政策形勢可以預見未來中國通用航空產業將快速增長。由此將使得空域需求變得緊張,通用航空產業快速增長對安全飛行、空域利用以及運行效率都提出了更高的要求,針對通用航空的特點為其配備相應的監視系統勢在必行。
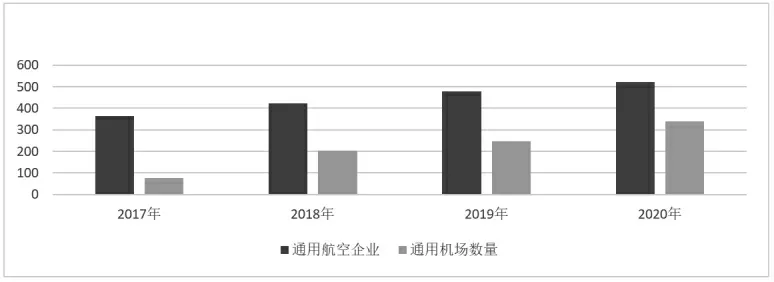
圖1 通用航空發展情況
國際民航組織于第十一屆航行大會確定ADS-B技術為全球新航行技術的主要發展方向。ADS-B 作為新監視技術的代表,因其定位精度高、更新頻率快、系統構成簡單、部署和維護成本低而受到重視和推廣[1]。我國的ADS-B 技術應用在民航局的政策和標準引導下,絕大多數航空器已加改裝完成,配備了1 090 MHz擴展電文(1090ES)ADS-B OUT 機載設備。在B213 航路、B330 航路、中國南海以及各機場的應用中積累了豐富的經驗且ADS-B 設備已經實現產業化。
本文針對通用航空運行特點和監視需求對比分析了幾種主要監視手段,確定了以ADS-B 技術為通用航空監視系統的核心。在以ADS-B 為核心的基礎上結合多源數據融合技術規劃了可靠性高、拓展性強、覆蓋全面的通用航空監視系統,為通用航空監視系統的建設與布局理清了思路。
1 通用航空監視系統需求
通用航空是指使用民用航空器從事公共航空運輸以外的民用航空活動,通常使用1 000 m 以下的低空空域[2]。通用航空相較于運輸航空具有單位體量小,產業鏈構成復雜的特點。我國低空空域環境復雜,高大建筑物、自然山體、氣象條件、空域結構等都加大了低空飛行的難度。通用航空飛行在操縱方法和管制規則上也較為混亂,缺乏行之有效的統一標準,各類航空器在同一空域的協同運行效率低下,這對通航低空飛行安全性造成威脅。通用航空監視技術應用面臨著眾多影響因素,也決定了監視系統必須符合通用航空的特點,滿足通用航空的監視需求。
1.1 運行環境復雜
隨著我國低空開放的力度加大,通用航空在諸如救援、觀光、航拍、教育培訓等很多領域都占據重要位置。通用航空飛行活動通常在高度1 000 m 以下的低空空域飛行,目視飛行(VFR)與儀表飛行(IFR)同時存在,部分繁忙低空空域通用航空與運輸航空等共同使用。多種障礙物和對流層復雜多變的氣象因素都對飛行活動有很大影響,通用航空飛行任務靈活復雜,飛行速度較慢,飛行距離較短,飛行高度較低,極易受到山體、建筑物等地面障礙物的影響,通用航空運行航路通常不固定,隨意性和機動性較強,作業環境差,各項因素決定了通用航空復雜的運行環境[3]。
1.2 航空器缺少統一標準
通用航空使用的航空器種類多樣、構成復雜,主要包括小型飛機、固定翼/旋翼無人機、直升機、旋翼飛行器,這些航空器具有體積相對較小、飛行高度相對低、速度相對慢等特點,相較于民航運輸飛機設備簡單,造價低。相同種類的航空器由于制造企業制造標準不統一,導致飛機性能和機載設備差異較大。不同種類的航空器飛行特點差異較大,運行監視難點不同,對在同一低空空域同時運行的多種航空器進行飛行動態的監視具有緊迫性、必要性,更具有挑戰性。
1.3 建設投入預算有限
部分通用航空機場的資金來源為國家投資,由管理部門進行投資建設通用航空機場,在建設完成后,由政府或者企業進行經營;或者由地方政府投資建設,地方政府為促進通用航空的發展,進行通用航空機場建設,然后交至國有企業運營;部分機場由非公有制經濟出資籌建,然后由企業運營管理。通用航空在建設過程中投資大,效益低,資金投入預算非常有限,需要充分考慮各功能部分建設規劃的經濟性、實用性與拓展性。綜上所述通用航空具有運行環境復雜、航空器缺少統一標準以及建設投入預算有限等監視系統建設限制因素。其中,復雜的運行環境給監視設施的建設帶來不便,對監視技術的可靠性、準確性有較高要求;航空器缺少統一標準導致監視機載設備的安裝推行困難,要求機載設備必須滿足重量輕、成本低、信號可靠、方便加裝的基本要求。建設投入預算有限要求對于監視設施的建設需充分考慮其成本和實用價值。
2 監視技術對比分析
2.1 廣播式自動相關監視(ADS-B)
廣播式自動相關監視(ADS-B)依靠機載導航設備來獲得飛機的位置和速度等信息,機載ADS-B 設備從GNSS 獲取定位信息,再對定位信息和飛行參數向其他具備ADS-B IN 的航空器或地面接收站進行廣播。ADS-B 技術可以在不增加雷達監控設備的情況下增強監視系統監控能力,實現對飛行的及時動態監視,有助于縮短航空器飛行間隔,提高空域的使用,擴大飛行容量[4]。ADS-B 技術具有很多優點,是監視領域的中堅力量,但在推廣使用過程中還是存在著一些問題。ADS-B 報文的定位信息數據源來自GNSS。在GNSS的完好性受損,出現故障發生錯誤的情況下,以ADSB 技術為核心的監視系統將失去監視能力。以ADS-B為核心的監視系統,對沒有安裝ADS-B 機載設備的航空器無法探測。自2017 年起多數航空器都裝配或加裝完成了ADS-B 機載設備[5]。
2.2 一次監視雷達(PSR)
一次監視雷達(PSR)依靠自身發射電磁波,然后通過接收目標對電磁波的反射信號測定目標位置及方位,具有穩定可靠,可無人值守的特點。一次監視雷達通常指脈沖雷達,能夠有效實現射頻脈沖連續發射,能夠對目標方位或者距離進行探測。一次監視雷達不需要考慮探測目標是否具有機載設備,可以實現絕大多數航空器的探測監視,屬于獨立非協同式監視手段。但一次雷達僅能探測識別目標的距離和位置信息,無法對被探測航空器的種類進行識別,除非要求航空器按管制指令做出指定動作回復,監視范圍相對較小,回波存在閃爍,建設和運行維護成本高,地面站建設受地形限制。
2.3 二次監視雷達(SSR)
二次監視雷達(SSR)由地面詢問雷達向目標發射頻率為1 030 MHz 的詢問脈沖信號,目標接收后,經過信號處理、譯碼,然后通過全向天線發送頻率為1 090 MHz 的應答脈沖信號。該應答信號中包含飛機代號、高度、方向、位置和距離等信息[6]。當地面雷達接到反射信號時,會對信號進行相應的解譯處理,從而獲取飛機高度、距離、方位、代碼等信息。二次監視雷達監視范圍廣,相較于一次監視雷達,二次監視雷達提供的信息更豐富。二次監視雷達屬于獨立協同式監視,各地面站能夠實現獨立運行。其地面站建設受地形影響,運行維護成本高,更新頻率低。
2.4 多點定位(MLAT)
多點定位(MLAT)也叫做雙曲定位,是通過計算監視目標向不同接收傳感器發出信號的到達時間差(TDOA)來定位監視目標的過程。最早在軍事上用來探測航空器位置,在民航監視領域,開始僅作為機場場面監視雷達的一種補充手段,用于機場場面監視[7]。近年MLAT 技術在區域飛行或進近階段也得到了驗證。多點定位可以利用已有的機載設備,屬于獨立協同式監視。具有定位精度高、更新頻率快、建設運行維護成本低等特點。但是對航空器定位需多個站點協同工作和實時解算,監視高度越低,需要的地面站數量越多。定位精度依賴于地面站的布局、時間同步、求解算法和測時精度。
幾種主要監視技術的比較見表1[8],廣播式自動相關監視(ADS-B)從探測范圍、定位精度、更新周期、建設成本方面都更具優勢。
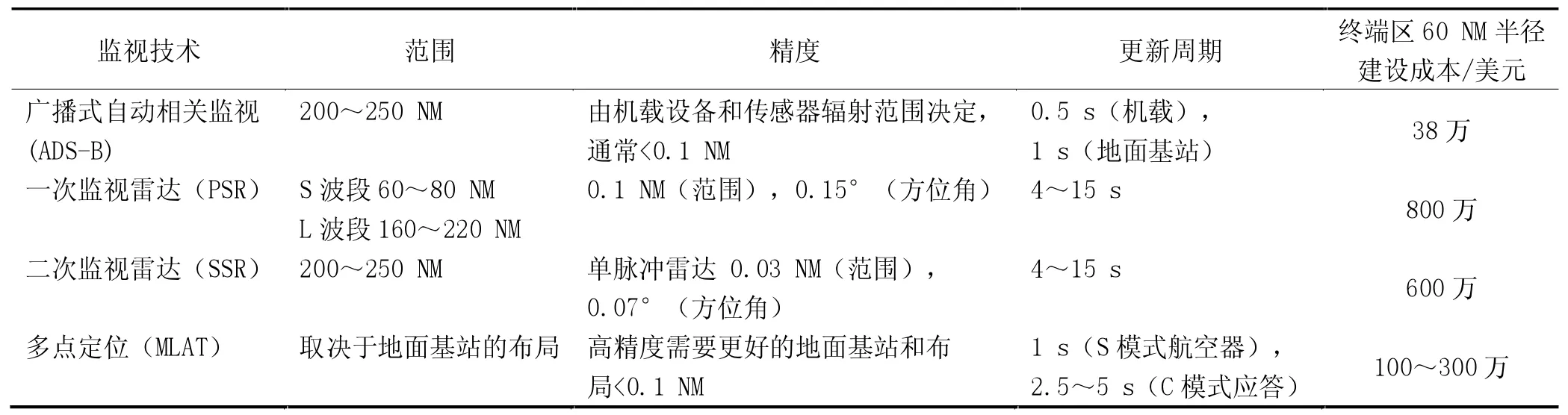
表1 監視技術比較
綜上所述在目前通用航空所處的發展階段,一種性能可靠,精度高,建設維護成本低,能夠適應通用航空復雜運行環境的監視技術對滿足活動量日益增長的通用航空十分必要。ADS-B 作為前沿監視技術,從定位精度、更新頻率、監視范圍、建設成本等方面都能滿足通用航空監視需求。建設以ADS-B 技術為核心設計合理高效的監視系統對通用航空監視具有重要意義。
3 監視系統規劃
3.1 系統框架及構成
系統框架如圖2 所示,主要由ADS-B 機載設備、ADS-B 地面站、視頻監控系統、數據融合服務器、顯示終端、ADS-B 數據傳輸網絡以及作為補盲的公共通信網絡組成。機載設備包括便攜式ADS-B 發射機、ADSB 車載發射機、無人機ADS-B 組件及航空器預裝ADS-B 設備。ADS-B 地面站負責接收監視范圍內的ADS-B 信息,通過ADS-B 數據傳輸網絡與其他監視信息在數據融合后生成航跡信息在終端設備顯示。
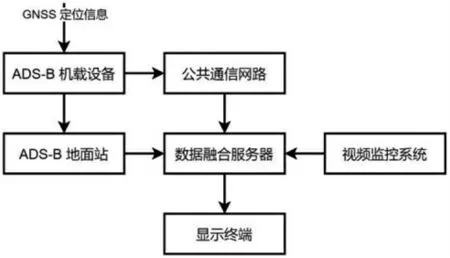
圖2 通用航空監視系統框架
系統構成及關聯如圖3 所示,ADS-B 機載設備定位信息數據源兼容GPS 和北斗導航系統,通過廣播式向地面站發送ADS-B 信息完成空地通信。空地通信由機載設備和地面站接收完成,由航空器ADS-B 機載設備向外廣播信息,地面站接收到ADS-B 數據后處理生成ASTERIX CAT021 格式的信息數據[9],通過ADS-B數據傳輸網絡由數據融合服務器進行數據融合。

圖3 通用航空監視系統拓撲圖
航空器間的空空通信以ADS-B IN 為核心,通過航空器機載設備的ADS-B IN 功能,實現航空器與航空器之間的數據通信,使飛行員能夠在第一時間了解飛行環境與飛行態勢,及時作出飛行決斷精準避讓,實現安全飛行。
場面視頻監控信息通過ADS-B 數據傳輸網絡匯入數據融合服務器,通過對監控目標的定位提取和類型標注,在終端顯示。場面監控信息的數據融合為管制中心的遠程指揮提供了極大的便利。
公共通信基站作為特殊情況下的補盲手段用作具備4G/5G 信息傳輸功能的機載設備和無人機操控信息的傳輸網絡,經過處理后上傳ADS-B 數據傳輸網絡。
ADS-B 數據傳輸網絡作為各信息源數據上傳以及各數據源、數據站和用戶之間的數據傳輸的載體,包括數據融合、數據傳輸網、信息發布網關。數據融合與監視中心站對ADS-B 數據進行匯總和處理,并通過數據網絡傳送給機場監視中心,機場監視中心根據安全需求,向相關部門提供航空器監視信息,通過信息發布網關為空管、企業、用戶提供信息服務。
3.2 系統特點
3.2.1 兼容性定位數據源
目前航空器定位數據信息主要依賴GPS,其完好性和可靠性容易受到很多因素的制約和干擾,在有突發情況發生時具有單一的數據源監視系統是相對脆弱的,因此系統設計兼容北斗衛星導航系統,以此保證得到穩定、準確的定位信息,實現自主安全飛行。
3.2.2 場面監視
場面監視除了為入場車輛配裝便攜ADS-B 設備避免場面沖突外,結合場面視頻監控和先進的目標檢測與跟蹤技術,對人、車、機、環境進行定位跟蹤監視,通過數據融合顯示,完善場面監視。
3.2.3 無人機監視
在通用航空運行中,無人機具有極其重要的地位,對無人機的監控和管制以及如何與其他航空器融合運行始終是通航領域的重點研究問題。對無人機加裝ADS-B 機載設備能夠解決“看得見”的監視問題,與無人機操縱者的信息通暢是實現“管得住”的必要環節。明確飛行規則,加強動態監視,為無人機飛行用戶提供信息獲取終端能夠有效地實現對無人機的監視和管制。
3.2.4 通信補盲
通用航空航空器構成豐富,運行環境復雜,難免出現ADS-B 通信故障或航空器信號傳輸困難的情況,依靠現有的移動通信基站通過機載設備4G/5G 傳輸功能,對ADS-B 信號補盲,為系統做通信備份,以此增加系統的監視可靠性,擴大航空器安全運行活動范圍。
4 結束語
廣播式自動相關監視(ADS-B)作為新監視技術的代表更加符合通用航空的實際需求。定位數據源兼容北斗,通信方式具備公共通信網絡傳輸能力的ADS-B監視系統可靠性更高。本系統規劃考慮了多種航空器同空域同時間運行的監視問題,多源數據融合,多種監視手段互補能夠更好地滿足通用航空監視需求。
猜你喜歡
中國外匯(2019年18期)2019-11-25 01:41:56
電子制作(2018年14期)2018-08-21 01:38:28
人大建設(2017年10期)2018-01-23 03:10:17
民生周刊(2017年19期)2017-10-25 10:29:03
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
中央社會主義學院學報(2013年1期)2013-03-01 04:17:32
中國火炬(2009年9期)2009-07-24 14:36:47
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
