氣動恒力控制系統(tǒng)的自抗擾控制
2022-08-06 07:13:38張樹忠吳安根戴福全劉路杰陳添益
液壓與氣動 2022年7期
關(guān)鍵詞:系統(tǒng)
張樹忠,吳安根,戴福全,劉路杰,陳添益
(1.福建工程學(xué)院 機械與汽車工程學(xué)院,福建 福州 350108;2.先進驅(qū)動節(jié)能技術(shù)教育部工程研究中心,四川 成都 610031;3.閩江學(xué)院 工業(yè)機器人應(yīng)用福建省高校工程研究中心,福建 福州 350108)
引言
隨著工件加工精度要求的提高,工業(yè)機器人越來越廣泛地應(yīng)用于各領(lǐng)域[1],如在磨削和拋光等操作過程力的大小決定工件質(zhì)量[2]。因此,保持恒定的接觸力對實際應(yīng)用有著重要意義。由于氣動系統(tǒng)具有結(jié)構(gòu)簡單、柔順性好、維護方便、低成本等優(yōu)點,成為了機器人末端主動柔順控制的研究熱點之一[3]。但是氣動系統(tǒng)存在比例流量閥死區(qū)、氣缸摩擦力以及氣體可壓縮等非線性問題,導(dǎo)致數(shù)學(xué)模型建立受限,難以實現(xiàn)高精度力控制。
針對上述問題,許多學(xué)者采用了不同控制策略進行研究,并取得了顯著成果。文獻(xiàn)[4]提出一種氣動加載系統(tǒng)的模糊自適應(yīng)逆控制方法,提高了系統(tǒng)的響應(yīng)與控制精度。文獻(xiàn)[5]提出了一種基于力控法蘭的末端恒力控制方法,設(shè)計了一種模糊PID控制器,其具有較好的動態(tài)性能和跟隨魯棒性。文獻(xiàn)[6]提出由位置控制器、死區(qū)補償器、同步控制器組成的復(fù)合控制方案,改善了系統(tǒng)動態(tài)響應(yīng)性能,降低了穩(wěn)態(tài)位置同步誤差。文獻(xiàn)[7]針對液壓系統(tǒng)中存在的輸入飽和、控制閥死區(qū)等問題,設(shè)計了一種自適應(yīng)控制器與非線性死區(qū)補償器相結(jié)合的控制方法,并進行了穩(wěn)定性證明與實驗驗證。文獻(xiàn)[8]提出了一種基于雙線性插值的死區(qū)補償方法,有效地減小無位移傳感器比例方向閥的死區(qū)和滯環(huán)。上述控制策略均有效的滿足控制需求,但大多數(shù)方法依賴于被控對象的數(shù)學(xué)模型。因此,設(shè)計一種不依賴于精確的數(shù)學(xué)模型、抗干擾性強、具有快速響應(yīng)性以及易于實現(xiàn)的控制器具有重要的實際意義。
自抗擾控制[9-11](ADRC)是由韓京清教授提出的,其核心思想是利用擴張狀態(tài)觀測器對系統(tǒng)“內(nèi)外”擾動進行估計并通過控制率補償,是一種不依賴于精確的數(shù)學(xué)模型控制技術(shù),因此受到了廣泛的關(guān)注與研究。文獻(xiàn)[12]在電液舵機系統(tǒng)采用自抗擾控制策略對舵機進行控制,提高了系統(tǒng)穩(wěn)定性以及抗干擾能力。文獻(xiàn)[13]提出了一種基于自抗擾算法的泵閥解耦控制方法,在動態(tài)性能和效率上都得到有效提升。雖然上述自抗擾控制器都取得了較好的效果,但是仍存在參數(shù)整定復(fù)雜,在實際工程應(yīng)用較為困難等問題。然而,高志強博士提出頻率尺度的概念,將ADRC線性化,并將參數(shù)與帶寬相聯(lián)系[14],使ADRC參數(shù)更直觀,整定更簡單,從而得到了廣泛應(yīng)用。文獻(xiàn)[15]提出一種由死區(qū)逆補償與線性自抗擾器構(gòu)成的串聯(lián)控制器,提高了系統(tǒng)力控制精度,且具有較強的魯棒性和抗干擾性。文獻(xiàn)[16]設(shè)計了一種積分型線性自抗擾控制(I-LADRC),解決了靜態(tài)誤差難以消除問題。
針對機器人末端裝置氣動恒力控制系統(tǒng)存在比例流量閥死區(qū)、氣缸摩擦力以及氣體可壓縮等非線性問題,本研究設(shè)計了一種二階線性PID自抗擾控制器,并加入了死區(qū)補償器。
1 系統(tǒng)工作原理與建模
1.1 氣動恒力控制系統(tǒng)工作原理
氣動恒力控制試驗平臺如圖1所示,主要由工控機、數(shù)據(jù)采集卡、數(shù)模轉(zhuǎn)換器、功率放大器、空氣壓縮機、力傳感器、比例流量閥、單桿雙作用氣缸、氣動三聯(lián)件、二位五通換向閥等組成。

圖1 恒力控制試驗平臺Fig.1 Constant force control test bench
氣動恒力控制系統(tǒng)結(jié)構(gòu)如圖2所示,工控機通過Qt軟件設(shè)計交互界面來實時顯示力傳感器數(shù)據(jù),并將采集的數(shù)據(jù)反饋給所設(shè)計的控制器,控制器輸出控制量經(jīng)過數(shù)模轉(zhuǎn)換器轉(zhuǎn)換和功率放大器放大后對比例流量閥進行控制,最終控制氣缸輸出所需目標(biāo)力。

圖2 控制系統(tǒng)結(jié)構(gòu)圖Fig.2 Control system structure diagram
1.2 氣動恒力控制系統(tǒng)數(shù)學(xué)模型
1) 比例流量閥模型
理想氣體流經(jīng)收縮噴管的等熵流動,采用Sanville流量公式可得比例流量閥的流量q為:
(1)
式中,Av——閥口有效面積
pd,pu——閥進口、出口壓力
Cf——閥節(jié)流口流量系數(shù)
T——絕對溫度
R——理想氣體常數(shù)
k——絕熱系數(shù)
在閥內(nèi)溫度不變時,流量與閥口面積有關(guān),而電壓u大小決定閥口面積,進而影響出口壓力pd,因此,將其等效看作為:
q=K1uf+K2pd
(2)
式中,K1,K2——待定系數(shù)
uf——實際輸出電壓,由比例閥死區(qū)電壓與控制器輸出電壓組成
2) 氣缸壓力
由質(zhì)量守恒定律和理想氣體狀態(tài)方程有:
(3)
式中,qA,qB——A腔和B腔氣體質(zhì)量流量
VA,VB——A腔和B腔的體積
V10,V20——A腔和B腔死區(qū)容積
AA,AB——A腔和B腔有效截面積
pA,pB——A腔和B腔壓力
l——活塞行程
x——活塞位移
3) 氣缸力平衡方程
根據(jù)牛頓第二定理,氣缸活塞力平衡方程為:
(4)
式中,m——與氣缸連接的工件總質(zhì)量
B——黏性阻尼系數(shù)
Ff——摩擦力
F——總輸出力
由于力傳感器測量的是實際輸出力F,其包括工具的重力與裝置輸出力Fn,因此實際輸出力F表示為:
F=Fn+mgcosθ
(5)
式中,θ——裝置軸向與垂直方向的夾角
裝置工具與工件接觸時,實際輸出力F與工件作用會被動使活塞產(chǎn)生位移x,則可以表示為:
F=Kex
(6)
式中,Ke——等效剛度系數(shù)
4) 控制系統(tǒng)狀態(tài)空間方程
(7)
2 控制器設(shè)計
I-LADRC能有效的解決傳統(tǒng)ADRC難以消除靜態(tài)誤差的問題,但在期望信號突變時,仍存在一定的超調(diào)和抖振問題,因此設(shè)計了一種二階線性PID自抗擾控制器。該控制器加入了跟蹤微分器對輸入信號進行過渡,并保留了積分項對穩(wěn)態(tài)誤差消除,以及加入死區(qū)補償器快速跳過死區(qū)。I-LADRC控制器和線性PID自抗擾控制器分別為圖3和圖4所示。

圖3 I-LADRC控制器結(jié)構(gòu)圖Fig.3 I-LADRC controller

圖4 線性PID自抗擾控制器結(jié)構(gòu)圖Fig.4 Linear PID active disturbance rejection controller
2.1 線性PID自抗擾控制器設(shè)計
式(7)中,將系統(tǒng)中氣缸摩擦力、氣體可壓縮等非線性影響視為總擾動,則等效為式(8):
(8)
式中,ω——外部擾動
b——系統(tǒng)控制量矩陣
根據(jù)式(8)二階線性PID自抗擾控制器,其主要由跟蹤微分器、擴張狀態(tài)觀測器、線性PID反饋控制率組成。
1)跟蹤微分器
跟蹤微分器是一個為輸入信號安排過渡的過程,將輸入信號v經(jīng)過跟蹤微分器,得到一個輸入的跟蹤信號v1和一個差分信號v2。
跟蹤微分器的算法如下:
(9)
式中,r——速度因子
h——采樣周期
h0——輸入信號的濾波因子
fhan——最速控制函數(shù)
2) 擴張狀態(tài)觀測器

擴張狀態(tài)觀測器算法如下:
(10)
式中,e——輸出力與力觀測值的誤差
β01,β02,β03——擴張狀態(tài)觀測器的增益系數(shù)
3) 線性PID反饋控制律
構(gòu)建線性PID反饋控制律,對擴張狀態(tài)觀測器估計的“總擾動”進行補償,逐步減小穩(wěn)態(tài)誤差、提高系統(tǒng)響應(yīng)以及補償擾動,則線性PID反饋控制律u為:
(11)
(12)
式中,u0——狀態(tài)誤差反饋控制律
β1,β2,β3——控制率系數(shù)
b0——補償因子
控制器參數(shù)根據(jù)參考文獻(xiàn)[14]提出的帶寬簡化概念,只需要對控制器帶寬ωc、觀測器帶寬ω0以及補償因子b0進行調(diào)節(jié),配置如下:
(14)
2.2 死區(qū)補償器設(shè)計
為更快的使比例閥跳出死區(qū)范圍,提高系統(tǒng)響應(yīng)性,設(shè)計了死區(qū)補償器:
(15)
式中,uf——被控對象實際輸入電壓
ub——正向死區(qū)補償電壓
3 試驗結(jié)果
為對比三種控制策略,根據(jù)實際打磨所需目標(biāo)力在80 N左右,并且時常伴隨目標(biāo)力切換和外擾力影響。首先對擴張狀態(tài)觀測器進行測試,然后對80 N恒力加載、50 N突變至80 N加載、外擾力加載三種工況下進行試驗。控制系統(tǒng)控制器參數(shù)如表1所示,其中kp,ki,kd分別表示控制器的比例、積分、微分項系數(shù)。控制系統(tǒng)關(guān)鍵參數(shù)如表2所示。
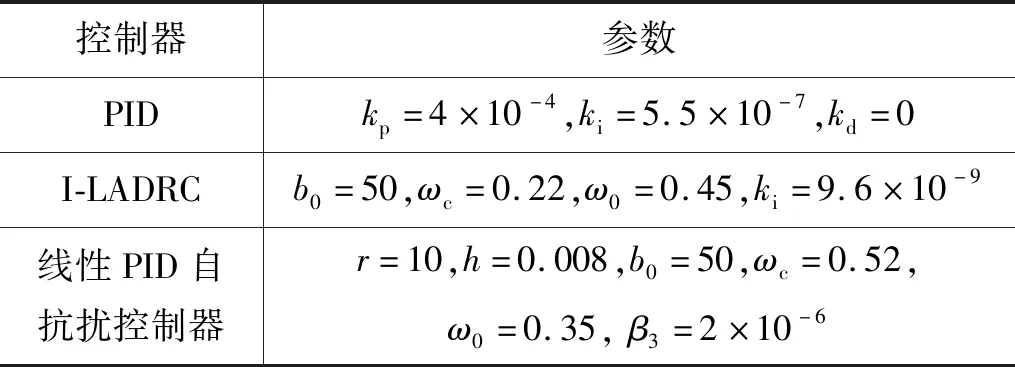
表1 三種控制器參數(shù)Tab.1 Parameters of three controllers

表2 氣動系統(tǒng)關(guān)鍵參數(shù)Tab.2 Key parameters of pneumatic system
1) 擴張狀態(tài)觀測器測試
由圖5可知,z1與輸出力幾乎重合,且z2隨著系統(tǒng)逐漸穩(wěn)定而趨于0 N/s,說明所設(shè)計擴張狀態(tài)觀測器具有很好的觀測效果。

圖5 擴張狀態(tài)觀測器的觀測結(jié)果Fig.5 Observation results of extended state observer
2) 三種工況試驗
(1) 80 N恒力加載:由圖6中恒力加載的跟蹤曲線可看出,線性PID自抗擾控制器具有較快的響應(yīng)、無波動現(xiàn)象,且系統(tǒng)穩(wěn)態(tài)誤差較小。

圖6 80 N恒力加載試驗結(jié)果Fig.6 Test results of 80 N
(2) 50 N突變至80 N加載:由圖7可知,在突變負(fù)載下,線性PID自抗擾控制器具有更快的響應(yīng)、穩(wěn)態(tài)誤差更小,且穩(wěn)定后無振蕩現(xiàn)象。

圖7 50 N突變至80 N加載試驗結(jié)果Fig.7 Test results of 50 N jumping to 80 N
(3) 外擾力加載:當(dāng)系統(tǒng)穩(wěn)定后,在5 s時突然從圖1中的曲面滑塊最底部變化至最頂部。由圖8可知,線性PID自抗擾控制器在干擾下收斂至目標(biāo)值更快,且穩(wěn)定后無振蕩現(xiàn)象,具有更強的魯棒性。

圖8 外擾力加載試驗結(jié)果Fig.8 Test results of external disturbances
對三種工況下的誤差進行對比(見表3),在80 N恒力加載下雖I-LADRC比線性PID自抗擾控制器均方根值更小,但從三種工況下的誤差最大值和均方根值綜合看出,相比傳統(tǒng)PID和I-LADRC,線性PID自抗擾控制器穩(wěn)態(tài)誤差均小于2 N,且在不同工況下都具有很好的控制效果。

表3 三種工況下的誤差對比Tab.3 Comparison of force errors under three working conditions
4 結(jié)論
針對氣動恒力控制系統(tǒng)存在比例閥死區(qū)、氣缸摩擦力以及氣體可壓縮等非線性問題,設(shè)計了一種二階線性PID自抗擾控制器,并加入了死區(qū)補償器,開展了80 N恒力加載、50 N突變至80 N力加載、外擾力加載三種工況的試驗研究,結(jié)果表明:
(1) 線性PID自抗擾控制器使穩(wěn)態(tài)誤差控制在2 N 以內(nèi),并且在外擾下能快速收斂至目標(biāo)值;
(2) 與PID,I-LADRC控制相比,線性PID自抗擾控制器具有更優(yōu)的動態(tài)響應(yīng)以及更強魯棒性,顯著提高了氣動恒力控制系統(tǒng)的恒力控制性能。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
