一種呼吸機人機異步的識別與改善方法
2022-08-06 07:13:34劉青華郝黎明
液壓與氣動 2022年7期
劉青華,石 巖,李 強,任 帥,3,郝黎明
(1.北方工業大學 機械與材料工程學院,北京 100041;2.北京航空航天大學 自動化科學與電氣工程學院,北京 100191;3.流體動力與機電系統國家重點實驗室,浙江 杭州 310063)
引言
2020年新冠狀病毒肆虐全球,造成大面積肺炎的感染,患者的肺部功能由于受到新冠病毒的損壞,產生大量黏液,氧氣吸收受阻,血氧飽和濃度降低,身體機能受到嚴重損害。呼吸機作為一種有效的治療裝置,能為失去呼吸能力的患者提供通氣支持,發揮著至關重要的作用。在臨床中,醫生發現適當使用呼吸機能維持危重癥新冠肺炎病人機體氧供和氧耗的平衡,使病人并發癥的發生率降低[1-5]。
但是,臨床發現呼吸機在輔助通氣治療過程中也存在著許多安全問題,如由于氣道壓過高導致的肺損傷,沒有足夠的呼氣時間導致的肺屏氣和長時間通氣導致的撤機困難等[6-10]。呼吸機造成的安全問題基本是由于通氣過程中人機異步而導致的。當呼吸機設置參數不符合患者需求時,就會發生人機異步,嚴重的人機異步比例高達43%。通氣過度協助或協助不足會轉化為不同類型的異步,對患者產生不同的影響。因此,對呼吸異步的準確識別與改善對患者的治療至關重要。
針對人機異步的監測和解決,國內外學者做了大量的研究。臨床上最廣泛接受的方法是通過目視分析氣道流量和壓力[11-12]。在輔助呼吸支持模式下,呼吸波形輸出是呼吸機與患者呼吸之間相互作用的結果,流量、體積和氣道壓力信號會受到患者-呼吸機相互作用,可以用作指導醫生采取適當措施以改善患者與呼吸機之間同步性的工具;但由于醫療資源的緊張,醫生無法持續監測機械通氣患者的異步情況。另外一種可靠的異步檢測方法是在食道中放置氣囊導管,以測量呼吸周期中胸腔內壓力的變化。食管或導管的監測的優勢是可以反映患者每一次的吸氣情況[13-15]。除此之外,肌電圖也已用于通過比較呼吸肌的肌電信號與呼吸機輸送的吸氣流量的開始來評估異步。研究者對接受壓力支持模式的健康受試者進行試驗誘導氣流受限,肌電圖記錄橫腹肌的活動獲得呼氣肌活動的時間和大小,并與根據血流描記法和肌電圖(EMG)確定的呼吸機循環和呼吸機活動進行比較,人機異步時,呼吸機氣流和肌肉群在受試者的循環中產生了明顯的相位差。兩種方法的缺點都是具有侵入性,并且某些患者尤其是機敏患者不能很好地耐受[16-17]。
為解決人機不同步問題,NELSON C等[18]開發了一種基于專家知識的算法,能最大程度地減少通氣壓力并根據通氣需求而變化,該算法實時監測呼吸機頻率和吸氣峰值,然后進行單獨或組合閉環控制來自動解算確定分鐘通氣量和潮氣量;RICHARD F等[19]設計了能夠滿足病人理想分鐘通氣量的自適應通氣控制器,該控制器基于調節呼吸機通氣頻率和通氣量來調節控制;石鵬等[20]設計了一種新的自適應通風控制策略,以PID為控制方法,在給定的潮氣量調節下自動調節壓力和吸氣持續時間,以單肺模型為例使用STM32微控制器做了驗證;YRONE F等[21]通過調節呼吸機運行時的單次呼吸潮氣量和呼吸頻率,控制患者動脈二氧化碳濃度濃度。有研究以患者血液中pH值、氧濃度和二氧化碳濃度為輸入量,采用神經模糊控制系統和中心神經控制系統調節呼吸機參數[22]。陳小飛[23]根據模糊控制原理,設計了呼吸機自動調壓控制框架,通過儲能單元的控制策略,實現功率分配,依據二次平移調節原理,利用獲取的電壓幅值比較檢測電壓值與預設值,實現自動調壓。目前對于人機不同步問題的研究大多基于通氣壓力的設置和自動調整[24-25]。
針對目前人機異步存在的一些問題,搭建了壓力支持實驗平臺,采用臨床醫生判斷人機異步的方法,基于呼吸波形,引入人機異步事件的量化定義和評價標準,提取6項呼吸波形特征,實現了人機異步事件的自動識別,利用模糊邏輯控制技術,實現了呼吸機吸氣觸發閾值、呼氣切換百分比和呼氣末正壓的實時調整。
1 人機異步類型及評價
1.1 人機異步類型
臨床研究中對人機異步的識別主要參照流速時間波形和壓力時間波形。當肺功能發生一定的變化,能夠提供直觀的參考信息,這些波形也作為判定人機異步的重要依據。臨床中常見的人機異步事件分為觸發異步和切換異步,觸發異步包含無效觸發、誤觸發、雙觸發3種,切換異步包含切換過早和切換過晚。
無效觸發為呼吸機無法感知患者努力。當患者產生吸氣動作,呼吸機無法識別患者吸氣,導致無法向患者供氣。無效努力的主要特征是由于患者吸氣努力而在壓力-時間波形中產生氣道壓降,從而降低了氣道壓力,并產生吸氣流量。如圖1所示,在標識處壓力出現下降,流速出現上升,表明患者此時有吸氣動作,后期無大幅度的壓力上升出現,表明呼吸機并未觸發。
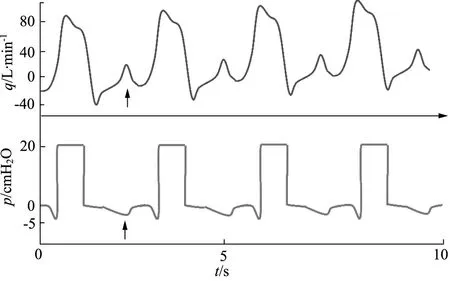
圖1 無效觸發壓力流速-時間曲線
誤觸發定義為在吸氣階段患者并未產生吸氣努力,但由于呼吸機管道泄漏或患者的咳嗽等原因導致氣道壓力急劇下降觸發了呼吸機進入了吸氣階段。誤觸發的主要特征是較短的吸氣時間和較小的峰值流速,如圖2所示,誤觸發后,呼吸機進入吸氣階段,流速曲線開始上升但由于患者并未呼吸,吸氣階段峰值流速較小,呼吸機很快切換。
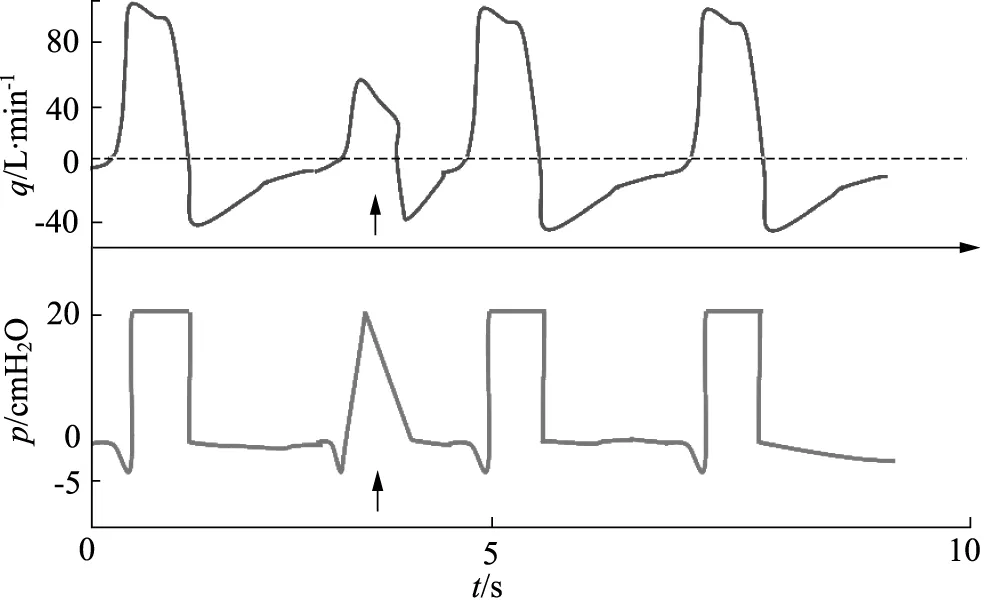
圖2 誤觸發壓力流速-時間曲線
雙觸發定義為2個周期間隔很短的呼氣時間。如果在呼吸機運轉至呼氣階段后患者的吸氣努力繼續進行,并且患者產生的這些努力能夠克服臨床醫生設定的觸發閾值,則可能會觸發呼吸機進行第2次呼吸。雙觸發的主要特征是患者切換到呼氣階段后很快轉入吸氣階段,如圖3所示,患者的呼氣在壓力-時間波形中產生氣道壓降后,立刻達到觸發壓力,進入吸氣階段。

圖3 雙觸發壓力流速-時間曲線
過早切換定義為呼吸機預設的吸氣時間小于患者自主的吸氣時間,吸氣階段時,患者還未吸氣完成呼吸機主動切換為呼氣。過早切換和雙觸發的區別在于,在過早切換中,患者的吸氣努力不足以觸發第2次呼吸,如圖4所示,呼吸波形出現較短的時間的吸氣階段。
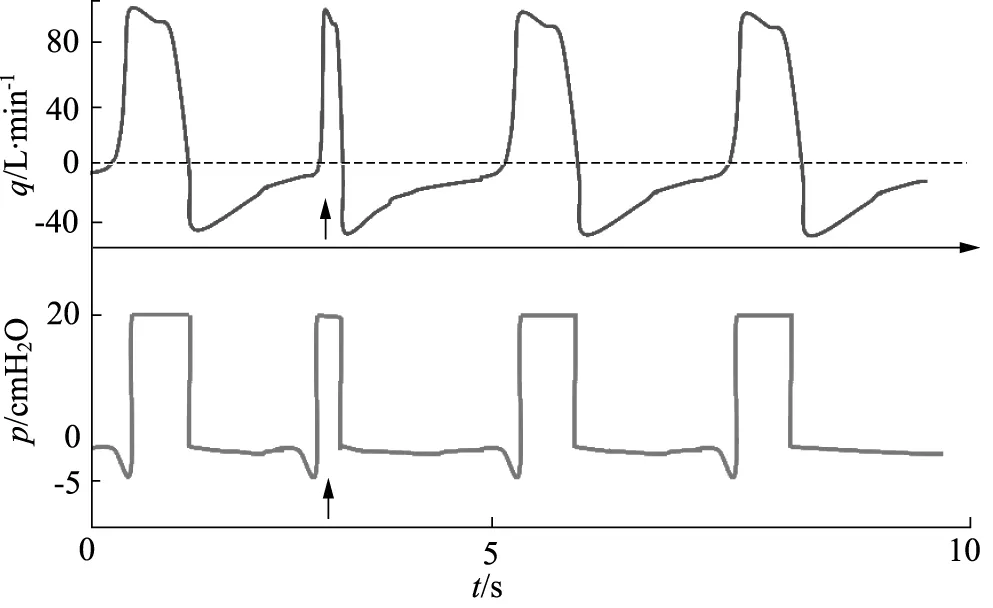
圖4 過早切換壓力流速-時間曲線
切換過晚定義為呼吸機中設定的吸氣時間超過患者吸氣時間。如果患者的吸氣階段結束后,呼吸機將在吸氣階段繼續運行,從而減少了可用于呼氣階段的時間,該現象在呼氣階段產生空氣滯留可能導致無效的努力,如圖5所示,呼吸波形出現較長的吸氣階段。
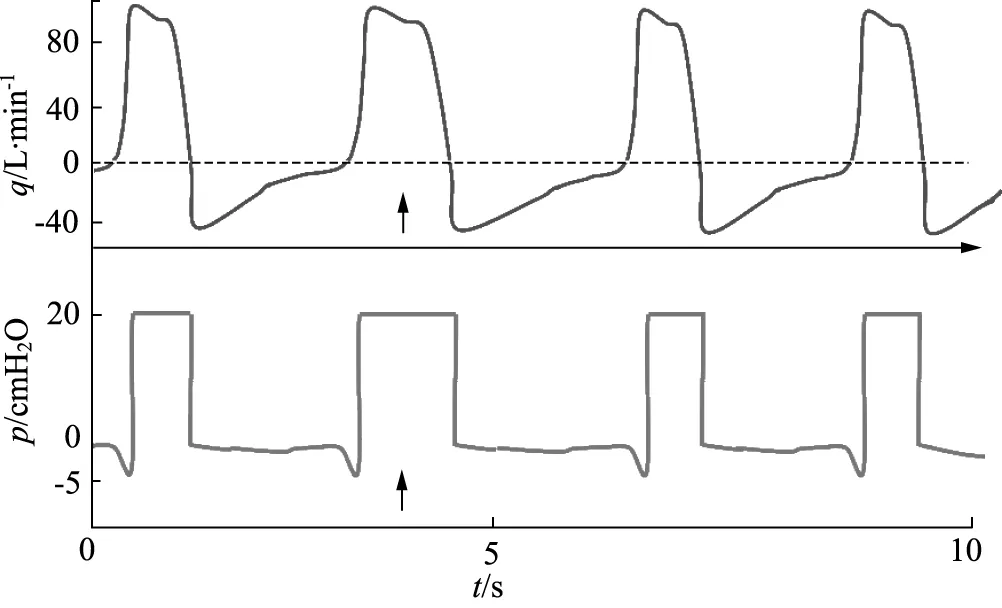
圖5 過晚切換壓力流速-時間曲線
1.2 人機異步評價
采用人機異步發生率A作為人機同步的評價指標,即人機異步的呼吸數除以總呼吸數(呼吸機輔助通氣和患者自主呼吸的總和),無效觸發、誤觸發、雙觸發、切換過早、切換過晚的呼吸數分別為N1,N2,N3,N4,N5,總模擬觸發數為N,表示為百分比[26]:
(1)
臨床研究表明,當異步率大于10%時,機械通氣時間延長,撤機失敗率增加,氣管切開率、ICU和住院病死率升高[6]。
1.3 人機異步的識別
人機異步的產生主要是因為呼吸機和患者之前的呼吸不匹配,要改善這種異步現象,減緩患者在機械通氣治療中的痛苦,首先就是要對人機異步進行有效的識別。在臨床治療中,醫生主要通過呼吸機的監測波形和患者的治療狀態來判定,但由于醫療資源的限制,人機不同步現象往往無法及時的識別,因此,人機異步的自動識別十分重要。
依據異步事件的定義和有關文獻的調查研究得到人機異步事件的量化定義[26]:無效觸發定義為吸氣觸發時間txc大于平均吸氣時間tex的1.5倍且吸氣功Px大于平均吸氣功Pex的1.5倍;誤觸發定義為吸氣峰值流速vp小于平均吸氣峰值流速vep的1/2;雙觸發定義為呼氣時間th小于平均呼氣時間teh的1/2;吸氣時間tx小于平均吸氣時間tex的1/2;切換偏早定義為吸氣時間tx大于平均吸氣時間tex的1/2;切換偏晚定義為吸氣時間大于平均吸氣時間tex的2倍。
如圖6所示,根據臨床異步事件量化定義提取6項呼吸波形特征:
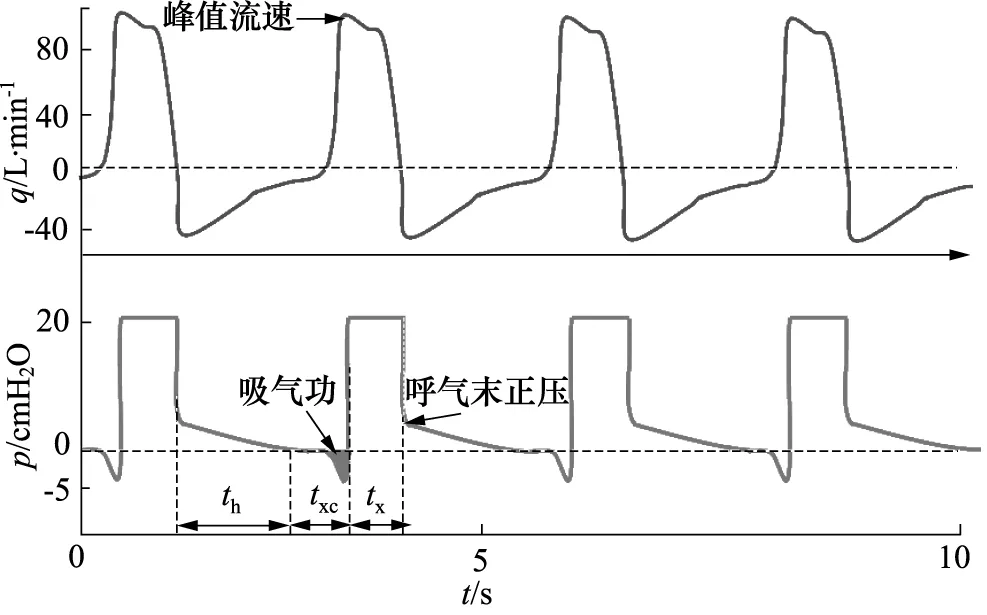
圖6 呼吸波形特征
(1) 吸氣觸發時間txc,上一周期降至呼氣末正壓后至呼吸機觸發前的時間;
(2) 吸氣功Px,吸氣階段壓力低于呼氣末正壓的觸發面積(PTP=壓力與時間的乘積);
(3) 吸氣時間tx,吸氣觸發至呼吸切換的時間;
(4) 峰值流速vp,壓力達到峰值時的吸氣流速;
(5) 呼氣時間th,呼氣切換至壓力降至呼氣末正壓的時間。
(6) 呼氣末正壓phm,呼氣末期在呼吸道保持的一定正壓。
根據人機異步的量化定義,判定標準是基于當前監測量與前期監測量的均值進行比較得到的,這種判斷的依據是呼吸節律,即人在靜息狀態下,呼吸的節律基本是均勻而整齊的。對此,以提取特征的均值為特征庫,在初始階段以前30次呼吸的特征均值為初始特征庫,之后的每次呼吸同特征庫特征值比較,以識別人機異步現象,如本次呼吸無人機異步現象,將本次提取的特征值納入特征庫然后更新特征庫,識別過程如圖7所示。
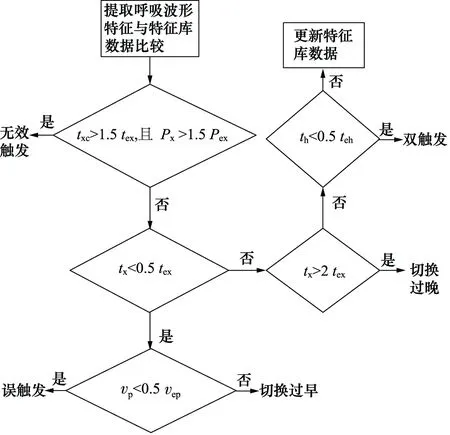
圖7 人機異步的自動識別流程圖
2 壓力支持通氣模式試驗平臺搭建
2.1 壓力支持通氣模式
壓力支持通氣模式(PSV)在有創和無創呼吸機上都可實現,通用性強,適用于治療可以自主呼吸的病人,工作過程如圖8所示。病人吸氣產生負壓觸發呼吸機,呼吸機送氣使氣道壓迅速升高,當氣道壓達到設定值后,維持該氣道壓力直至吸氣流量降低至峰值流量的設定百分比,此時,病人從吸氣階段轉為呼氣階段。壓力支持通氣模式主要適用于病人脫離呼吸機的訓練過程中[27]。
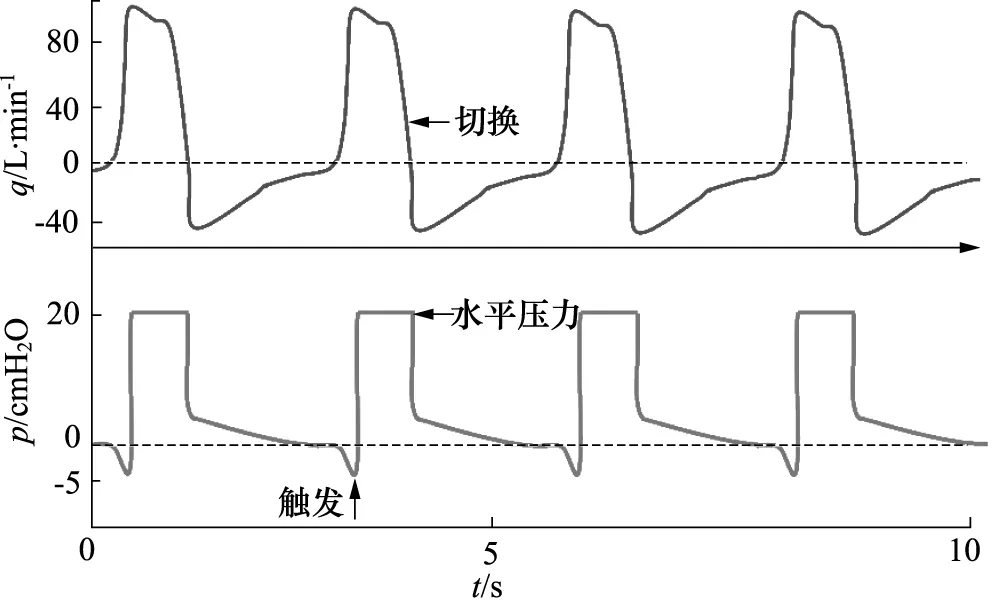
圖8 PSV通氣模式呼吸波形示意圖
由PSV通氣模式的原理可知,該模式輸入量為氣道壓力和流量,在使用呼吸機時,需要預設的呼吸機參數為吸氣觸發閾值pxt、呼氣切換百分比E、水平壓力ps、呼氣末正壓phm。試驗平臺的設計包括氣路設計和電路設計,呼吸機的結構和閾值設置均參考美國萬靈科公司Pb700系列呼吸機,水平壓力范圍:0~70 cmH2O,呼氣切換百分比范圍:1%~80%。
2.2 試驗平臺的設計
如圖9所示,試驗平臺的整體結構包括3部分:吸氣道、呼氣道與氣源。呼吸機治療氣源采用自然氣源,控制電路通過驅動風機轉動鼓風為氣路提供一定的風壓與流量以完成治療,氣路采用醫用波紋管,醫用波紋管具有柔韌性好、易于彎曲、抗壓、耐磨與減振等優點,呼吸機面罩采用非排氣面罩,將氣路固定于患者口鼻,實現患者吸氣道與氣路的連通。
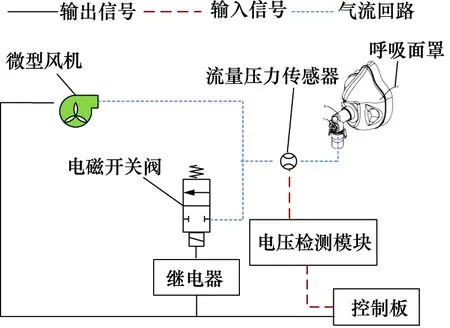
圖9 呼吸機氣路
吸氣時,當壓力流量傳感器監測到壓力信號達到預設值,風機打開,電磁開關閥關閉,空氣進入氣道,氣道壓上升;呼氣時,當壓力流量傳感器監測到流量信號到達吸氣終止條件時,風機進入低壓供氣狀態,電磁開關閥打開,當氣路壓力達到設定壓力,呼氣末正壓閥打開,肺內氣體排向大氣。
搭建實物測試平臺如圖10所示,呼吸機的中央處理模塊核心芯片采用基于ARMCortex-M3的32位微控制器-STM32F103ZET6,擁有數模轉化和串口通信等模塊,能實現傳感器的信息采集和對風機、電磁閥的有效控制。

圖10 整體測試平臺
壓力流量傳感器采用美國矽翔傳感器型號FS6122,其適用環境為相對濕度不大于100%且無水汽凝結的空氣,工作溫度-5~65 ℃,壓力滿量程測量精度為±(0.8+0.5 fs)%,測量范圍為-5~45 cmH2O,流量滿量程測量精度為±(2.5+0.5 fs)%,測量范圍為-100~100 L/min。
風機選用東萊WS7040,風機自帶控制板WS2403,支持脈沖調制的控制方式,風機接口直徑17 mm,最大風量達280 L/min,最大風壓65 cmH2O。
電磁開關閥選用SMCVX230,接口直徑15 mm,臨界壓力比為0.39,上游壓力20 cmH2O,下游壓力0 cmH2O,最大流量可達129 L/min。
3 呼吸參數自調整
模糊控制用模糊的語句對被控對象的狀態特征進行相應的描述,能夠實現對非線性系統的有效控制[28-32]。本研究采用的模糊參數自調整控制器是根據控制系統中當前吸氣功相對誤差e1、呼氣時間相對誤差e2和吸氣流速相對誤差e3作為信息,對吸氣觸發閾值pxt、呼氣末正壓phm和呼氣切換百分比E進行調整,進而達到自適應的效果。在實際控制中,通過單片機實時的采集當時的吸氣功相對誤差、呼氣時間相對誤差和吸氣流速相對誤差,通過已設置的程序進行模糊解算,從而實現呼吸機參數的實時調整,由此使整個控制系統獲得更好的控制結果。
3.1 模糊輸入量
采用吸氣功相對誤差e1、呼氣時間相對誤差e2和吸氣流速相對誤差e3作為輸入變量,對于呼氣末正壓的設置由吸氣功和呼氣時間決定,觸發閾值由吸氣功和吸氣流速決定:
(2)
(3)
(4)
吸氣功相對誤差,使用“大”(B)、“中”(M)、“小”(S) 3個模糊詞對應量化,最終取[-1,1]為吸氣功相對誤差的量化域,{B,M,S}為相對應的模糊詞集;
呼氣時間相對誤差,使用“長”(L)、“中”(M)、“短”(S)3個模糊詞對應量化,最終取[-0.5,0.5]為呼氣時間相對誤差的量化域,{L,M,S}為相對應的模糊詞集;
吸氣流速相對誤差,使用“大”(B)、“中”(M)、“小”(S)3個模糊詞對應量化,最終取[-0.5,0.5]為吸氣流速相對誤差的量化域,{B,M,S}為相對應的模糊詞集。
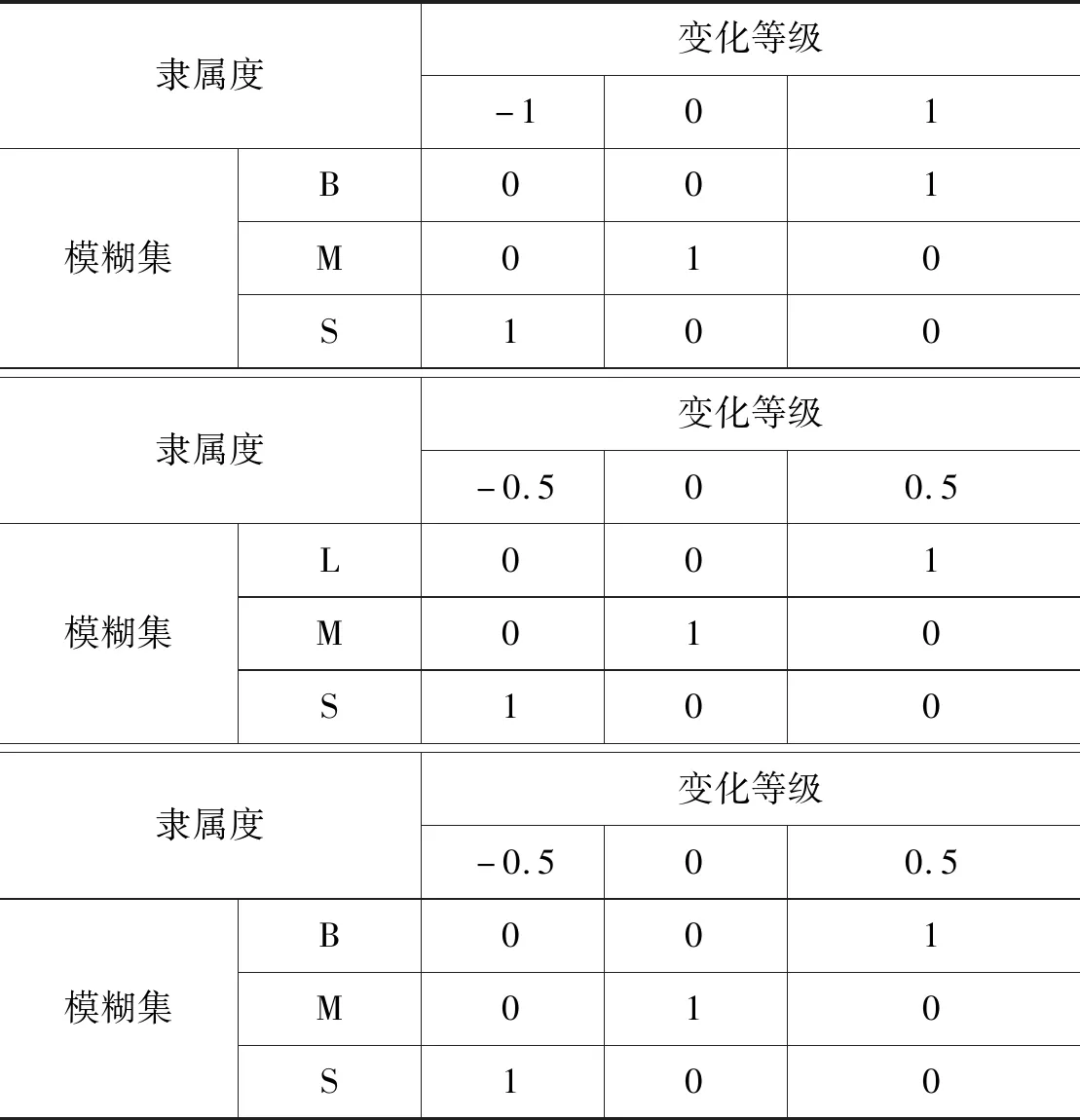
表1 隸屬度表
3.2 模糊規則
依據人機異步率最小原則和經驗得到如下的調整原則。
1) 呼氣末正壓的調整原則
呼氣末正壓是指病人在呼氣后呼吸道仍保持一定正壓。呼氣末正壓主要針對肺泡早期閉合和肺不張的病人,能擴張肺泡,減少的功能殘氣量的增加,達到提高血氧的目的;但在壓力支持通氣模式中,較大呼氣末正壓會導致患者吸氣觸發困難,易造成無效觸發及雙觸發。呼氣末正壓增量比值Kp的模糊規則見表2。
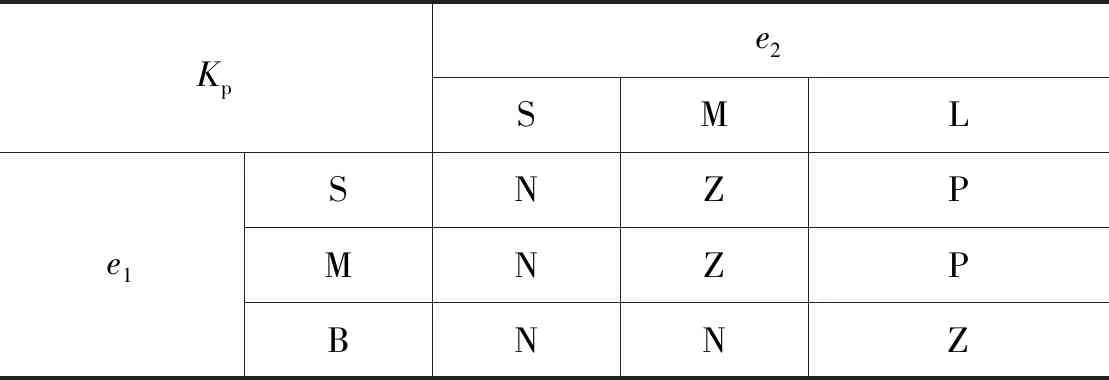
表2 呼氣末正壓增量比值的模糊規則
2) 吸氣觸發閾值調整原則
吸氣觸發閾值是指,在吸氣階段,患者如果產生吸氣動作且達到設定的吸氣觸發閥值,呼吸機就按照設定的參數壓力供氣。觸發閾值的設定在PSV通氣模式中十分重要,觸發閾值設置的過大容易造成無效觸發,觸發閾值過小會造成誤觸發和雙觸發,吸氣觸發調整規則見表3。
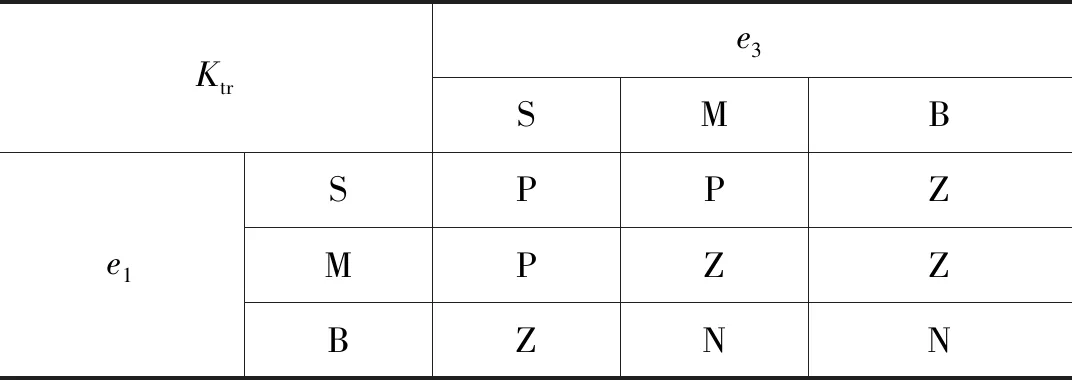
表3 吸氣觸發調整規則
3.3 解算輸出量
基于調研市場呼吸機的參數設置情況,將呼氣末正壓增量比值和觸發閾值增量比值作為輸出量,隸屬函數的選擇為三角隸屬函數。采用重心法解算輸出信息即式(5),得推理輸出圖11和圖12。

圖11 呼氣末正壓增量比值的推理輸出圖

圖12 吸氣觸發增量比值的推理輸出圖
(5)
下一次的切換百分比E(k+1)、呼氣末正壓設定值phm(k+1)和觸發閾值pxt(k+1)可由式(6)~式(8)求得。
(6)
phm(k+1)=phm(k)+Kppehm
(7)
pxt(k+1)=pxt(k)+Ktrpext
(8)
式中,E(k)——當前切換百分比
tx(k)——吸氣時間
tex(k)——吸氣時間均值
phm(k)——當前呼氣末正壓設定值
Kp——呼氣末正壓增量比值
pehm——呼氣末正壓均值
pxt(k)——當前吸氣觸發閾值
Ktr——吸氣觸發增量比值
pext——吸氣觸發均值
4 結果分析
4.1 觸發效果評價
圖13為呼吸機識別無效觸發的壓力流量波形圖,呼吸時間3.8 s,呼吸頻率16次/min,平均吸氣時間1.0 s,平均呼氣時間2.8 s,呼吸比2.8∶1,呼氣末正壓為3.90 cmH2O。初始吸氣觸發閾值為1.00 cmH2O,吸氣觸發時間為1.2 s,得到平均吸氣功為0.0107 cmH2O·s;之后吸氣觸發閾值不斷增大至2.00 cmH2O,此時,產生了吸氣觸發困難,呼吸機檢測到呼吸功為0.1070 cmH2O·s,吸氣觸發時間為6.5 s,識別為無效觸發;呼吸機迅速做出調整,將吸氣觸發閾值降至1.63 cmH2O,吸氣功降至0.010 cmH2O·s,吸氣觸發時間降至1.1 s,人機異步消除。

圖13 無效觸發識別壓力流量波形圖
圖14為呼吸機識別誤觸發的壓力流量波形圖,呼吸時間2.50 s,呼吸頻率24次/min,平均吸氣時間1.07 s,平均呼氣時間1.50 s,呼吸比1.5∶1。初始吸氣觸發閾值為0.50 cmH2O,吸氣時間為0.15 s,呼氣末正壓3.50 cmH2O,得到平均吸氣功為0.0011 cmH2O·s,峰壓流速為15.50 L/min;之后吸氣觸發閾值不斷降低至為0.34 cmH2O,此時,呼吸機檢測到呼吸功為0.0001 cmH2O·s ,吸氣時間為0.52 s,峰壓流速為-37.78 L/min,識別為雙觸發;呼吸機識別后做出調整,將吸氣觸發閾值升至0.69 cmH2O ,吸氣功升至0.0080 cmH2O·s,峰值流速升至46.00 L/min,人機異步消除。

圖14 誤觸發識別壓力流量波形圖
圖15為呼吸機識別雙觸發的壓力流量波形圖,呼吸時間2.5 s,呼吸頻率24次/min。平均吸氣時間0.90 s,平均呼氣時間1.60 s,呼吸比1.7 ∶1,初始吸氣觸發閾值為0.50 cmH2O,吸氣觸發時間為0.50 s,呼氣末正壓3.50 cmH2O,得到平均吸氣功為0.0029 cmH2O·s,峰壓流速為14.11 L/min,不斷增大吸氣觸發閾值至0.66 cmH2O,此時,呼吸機檢測到呼吸功為0.0034 cmH2O·s,呼氣時間0.27 s,峰值流速-4.15 L/min為誤觸發,呼吸機將吸氣觸發閾值升至1.00 cmH2O,呼氣末正壓降低為3.10 cmH2O,調整后呼氣時間0.90 s,人機異步消除。
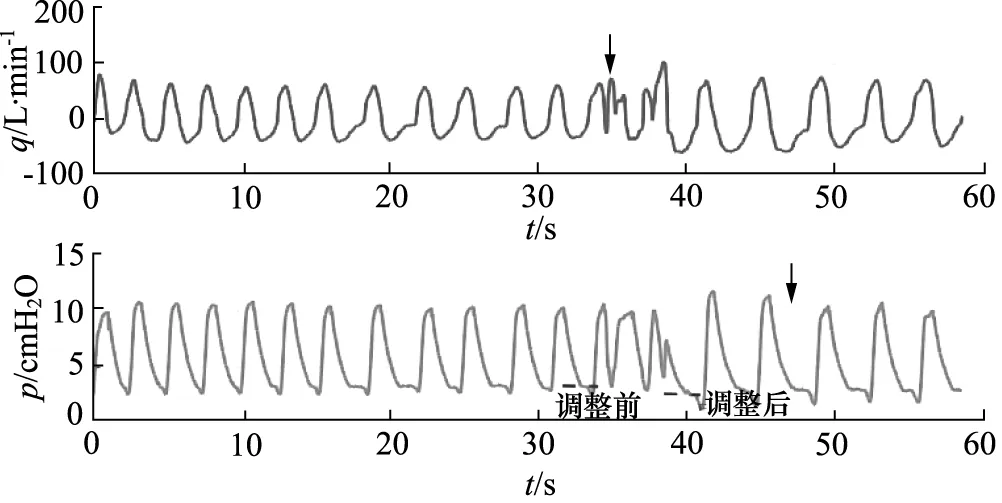
圖15 雙觸發識別壓力流量波形圖
圖16為呼吸機識別切換過早的壓力流量波形圖,呼吸時間3.8 s,呼吸頻率16次。平均吸氣時間2.2 s,平均呼氣時間1.6 s,呼吸比0.7∶1,初始吸氣觸發閾值為0.5 cmH2O,吸氣觸發時間為0.2 s,呼氣末正壓2.5 cmH2O,呼氣切換百分比0.35,之后不斷降低切換百分比為0.22,此時,吸氣時間為1.0 s,呼氣時間為1.4 s,識別為切換過早,呼吸機將切換百分比降低到0.05,調整后吸氣時間1.7 s,人機異步消除。
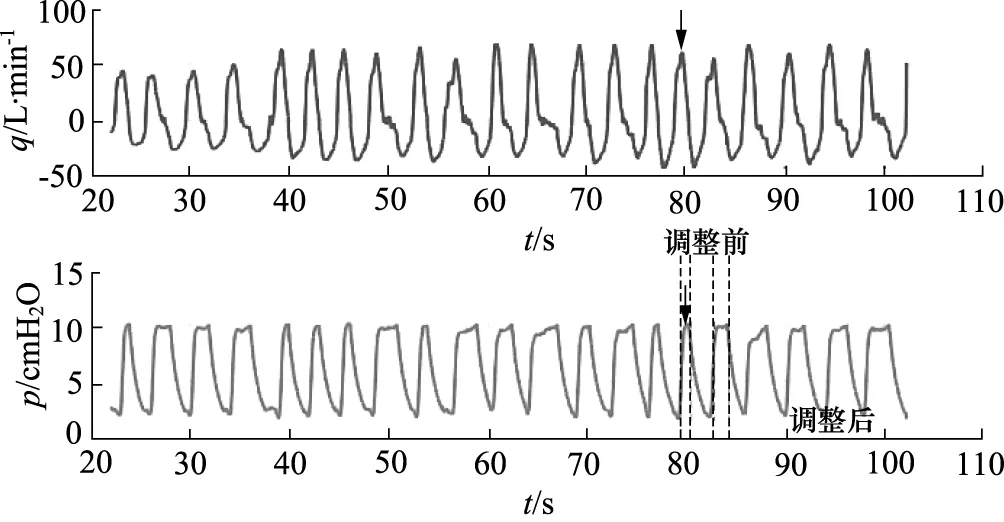
圖16 切換過早識別壓力流量波形圖
圖17為呼吸機識別雙觸發的壓力流量波形,呼吸時間2.8 s,呼吸頻率21次。平均吸氣時間1.2 s,平均呼氣時間1.6 s,呼吸比1.3∶1,初始吸氣觸發閾值為0.5 cmH2O,吸氣觸發時間為0.3 s,呼氣末正壓2.5 cmH2O,呼氣切換百分比0.35,之后不斷降低切換百分比為0.23,此時,吸氣時間為4.6 s,呼氣時間為1.7 s,識別為切換過晚,呼吸機調整設置參數將切換百分比提高到0.80,調整后吸氣時間0.8 s,人機異步消除。
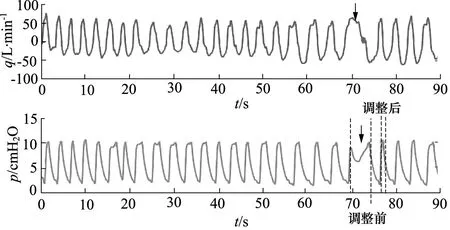
圖17 切換過晚識別壓力流量波形圖
5 結論
本研究對呼吸機的人機同步性進行了研究,涉及到的關鍵技術有:人機異步量化定義、呼吸波形的特征提取、試驗平臺的建立和呼吸機參數自調整等,主要研究結論如下:
(1) 基于呼吸波形,提出了5種人機異步事件的量化定義,基于人的呼吸節律實現了人機異步事件的自識別,為后續研究提供了理論基礎;
(2) 基于壓力支持通氣模式,針對呼吸參數無法調整、人機協調性差、控制精度低等問題,設計了以 STM32F103為核心的呼吸機;
(3) 采用模糊邏輯的方法,設計了呼吸參數自調整控制器,以吸氣功、吸氣時間、呼氣時間為輸入量,呼氣末正壓、吸氣觸發閾值為輸出量,利用反復的調試以及醫學專家的知識經驗建立了模糊控制規則庫,建立了一套呼吸機參數調整算法;
(4) 在實現人機異步識別和良好試驗平臺的基礎上,對呼吸機參數調整算法做了測試,試驗表明,呼吸機能準確識別無效觸發、誤觸發、雙觸發、切換過早和切換過晚5種異步事件,并針對不同的異步事件對呼氣末正壓、呼氣切換百分比、吸氣觸發閾值進行實時調整。
