基于沉降點(diǎn)占比的非錯(cuò)臺(tái)型橋頭沉降檢測(cè)方法
2022-08-03 09:41:42陳圣迪
公路交通科技 2022年6期
張 萌,溫 添,陸 鍵,郎 洪,陳圣迪
(1.同濟(jì)大學(xué) 道路與交通工程教育部重點(diǎn)實(shí)驗(yàn)室,上海 201804; 2.上海海事大學(xué) 交通運(yùn)輸學(xué)院,上海 201306)
0 引言
我國江河湖泊眾多,水系發(fā)達(dá),橋梁成為連接渡水公路的主要技術(shù)手段,住建部最新統(tǒng)計(jì)數(shù)字顯示,僅江浙滬三地城市橋梁總數(shù)就多達(dá)32 515座[1]。以寧波市為代表的江南地區(qū)地基以軟土為主,修建在這類地基上的公路與橋梁在通車運(yùn)營后多發(fā)生路橋連接處的差異沉降,產(chǎn)生橋頭沉降現(xiàn)象,造成車輛經(jīng)過時(shí)的顛簸,這會(huì)影響行車平順性和車內(nèi)人員的乘坐舒適度,嚴(yán)重時(shí)還會(huì)危及行車安全。
為及時(shí)掌握橋頭沉降的發(fā)育演變規(guī)律,采取及時(shí)有效、經(jīng)濟(jì)性的處治措施,需要對(duì)其定量檢測(cè)。目前描述橋頭沉降的指標(biāo)[2]主要有工后沉降量、沉降縱坡差、垂直錯(cuò)臺(tái)高度、國際平整度指數(shù)IRI與標(biāo)準(zhǔn)偏差σ、車輛加權(quán)加速度均方根等,具體的檢測(cè)方法有水準(zhǔn)儀測(cè)量法、3米直尺法、連續(xù)平整度儀、車載式顛簸累積儀、多功能激光平整度檢測(cè)儀測(cè)量法[3]和平整度慣性剖面儀測(cè)量法[4]等。其中,水準(zhǔn)儀測(cè)量法通過測(cè)量路橋過渡段上布設(shè)測(cè)點(diǎn)的高程來繪制縱斷面線,并對(duì)比竣工驗(yàn)收縱斷面線測(cè)得工后沉降量;3米直尺法是將直尺置于路橋過渡段上,將楔塊塞入尺底間隙并讀取最大間隙值,以此來描述橋頭沉降,上述兩種方法檢測(cè)效率和采樣密度低且易受交通流和管制影響。考慮到橋頭沉降會(huì)影響路面平整度,一些學(xué)者應(yīng)用平整度類檢測(cè)設(shè)備檢測(cè)橋頭沉降,但連續(xù)平整度儀、車載式顛簸累積儀、多功能激光平整度儀和平整度慣性剖面儀均僅能對(duì)短波長即路面的局部凸起和凹陷達(dá)到較好地檢測(cè)效果,對(duì)于長波長即區(qū)段型沉降靈敏度較低,且利用上述設(shè)備檢測(cè)橋頭沉降時(shí),連續(xù)平整度儀易受坑槽等路面病害干擾;車載式顛簸累積儀與車速密切相關(guān),須考慮結(jié)果修正;多功能激光平整度儀和平整度慣性剖面儀雖檢測(cè)精度高,但無法較好地反映橋頭沉降的真實(shí)狀況。此外,橋頭沉降造成車輛顛簸和車上人員乘坐舒適性變化,我國GB/T 1344.1—2007機(jī)械振動(dòng)與沖擊標(biāo)準(zhǔn)[5]建立了車輛振動(dòng)與乘坐舒適性的聯(lián)系,一些學(xué)者便由此入手,通過檢測(cè)車輛經(jīng)過沉降處時(shí)的振動(dòng)加速度變化[6-8],或駕駛員的心率變化[9]間接表征了橋頭沉降狀況,但上述方法均通過研究車和人來間接量化橋頭沉降狀況,未測(cè)得直接反映橋頭沉降的相關(guān)指標(biāo),這就無法為處治措施提供定量的決策參考,且車輛振動(dòng)加速度、人體乘坐舒適性和心率變化皆與車速密切聯(lián)系,難以獲得標(biāo)準(zhǔn)化的檢測(cè)結(jié)果。
2018年5月正式實(shí)施的我國《公路技術(shù)狀況評(píng)定標(biāo)準(zhǔn)》[10](下稱《標(biāo)準(zhǔn)》)新增路面跳車內(nèi)容,《標(biāo)準(zhǔn)》規(guī)定使用斷面類設(shè)備檢測(cè)路面跳車,消除縱坡和異常值對(duì)路面高程的影響后,以0.1 m為采樣間隔、10 m為統(tǒng)計(jì)單位計(jì)算單位長度內(nèi)路面高程極差,結(jié)合計(jì)算結(jié)果與3等級(jí)路面跳車程度劃分標(biāo)準(zhǔn)得到各單位路段內(nèi)的跳車評(píng)價(jià)結(jié)果,再根據(jù)路面跳車扣分標(biāo)準(zhǔn)和相關(guān)計(jì)算公式得到路面跳車指數(shù)(PBI)。然而《標(biāo)準(zhǔn)》新增的路面跳車內(nèi)容關(guān)注的主要是由路面局部凸起、凹陷及路橋異常連接引起的跳車,即僅包含錯(cuò)臺(tái)型橋頭沉降,尚未包含其他類型的橋頭沉降,即由非錯(cuò)臺(tái)型橋頭沉降引發(fā)的跳車研究仍基本處于空白狀態(tài)。
基于路面平整度測(cè)量的橋頭沉降檢測(cè)技術(shù)提供了一種代替主觀、低效的人工測(cè)量的方法,然而,平整度設(shè)備對(duì)橋頭沉降檢測(cè)的適應(yīng)性較差,且在此領(lǐng)域尚存在一定的技術(shù)缺陷;通過對(duì)車和人的研究間接量化橋頭沉降狀況是一種新的研究思路,但未還原道路自身的病害狀況,且因車速影響須修正計(jì)算結(jié)果;《標(biāo)準(zhǔn)》規(guī)范了錯(cuò)臺(tái)型橋頭沉降的檢測(cè)與計(jì)算,但尚未涉及非錯(cuò)臺(tái)型橋頭沉降。鑒于此,本研究針對(duì)《標(biāo)準(zhǔn)》未涉及的非錯(cuò)臺(tái)型橋頭沉降進(jìn)行研究,提出利用車載式檢測(cè)系統(tǒng)快速采集路橋縱坡與路面圖像,形成道路縱斷面線,并結(jié)合連續(xù)的路面圖像在圖線上定位路橋連接位置,基于此建立起橋頭沉降計(jì)算模型和算法,形成了一種非錯(cuò)臺(tái)型橋頭沉降檢測(cè)方法。最后,在寧波境內(nèi)開展了多組試驗(yàn)與計(jì)算分析,并對(duì)比人工測(cè)量結(jié)果評(píng)估了該方法。
1 沉降類型與檢測(cè)技術(shù)
1.1 橋頭沉降類型
橋頭沉降是由路橋連接處的不均勻沉降導(dǎo)致的,根據(jù)沉降后的道路線形特征可將其分為錯(cuò)臺(tái)型、折線型和曲線型3類[11],如圖1所示。錯(cuò)臺(tái)型沉降指因路橋差異沉降或路面材料剝落產(chǎn)生的路橋連接處“臺(tái)階”狀沉降,如圖1(a)所示;折線型沉降常發(fā)生于設(shè)有橋頭搭板的路橋過渡段,顯現(xiàn)出縱坡變化較為均勻的折線,如圖1(b)所示;發(fā)生橋頭沉降后的道路縱斷面線呈現(xiàn)出曲線的特征,這種橋頭沉降稱為曲線型沉降,如圖1(c)所示。

圖1 3類橋頭沉降Fig.1 Three types of bridgehead settlement
上述3類橋頭沉降中,錯(cuò)臺(tái)型橋頭沉降呈現(xiàn)出局部凸起的特征,對(duì)于這類道路縱斷面高程具有突變特征的沉降,《標(biāo)準(zhǔn)》的路面跳車內(nèi)容已對(duì)其檢測(cè)和計(jì)算作出了規(guī)定,而折線型和曲線型橋頭沉降由于具有漸變性和區(qū)段性,不再適用于路面跳車相關(guān)內(nèi)容,故這兩類非錯(cuò)臺(tái)型橋頭沉降成為研究對(duì)象和重點(diǎn)。
1.2 檢測(cè)技術(shù)
兩類非錯(cuò)臺(tái)型橋頭沉降在道路線形上呈現(xiàn)出不同特征,故提出基于道路縱斷面線研究橋頭沉降的檢測(cè)方法。對(duì)兩類沉降的檢測(cè),利用斷面類檢測(cè)技術(shù),同時(shí)搭載路面圖像檢測(cè)設(shè)備,形成車載式非錯(cuò)臺(tái)型橋頭沉降檢測(cè)系統(tǒng),如圖2所示。車載式檢測(cè)系統(tǒng)主要包含檢測(cè)車、慣性導(dǎo)航系統(tǒng)、線掃描相機(jī)、光電編碼器DMI、GPS、工業(yè)控制機(jī)和計(jì)算機(jī)顯示器等。其中,慣性導(dǎo)航系統(tǒng)用于采集道路縱坡數(shù)據(jù),光電編碼器DMI用于獲取實(shí)時(shí)車速與行駛距離,它們共同為計(jì)算獲取道路縱斷面線提供數(shù)據(jù)基礎(chǔ);線掃描相機(jī)作為路面圖像檢測(cè)設(shè)備可拍攝連續(xù)的路面圖像,當(dāng)實(shí)現(xiàn)道路縱斷面線與路面圖像位置對(duì)應(yīng)后,即可在圖線上快速定位路橋連接位置(橋接縫)。
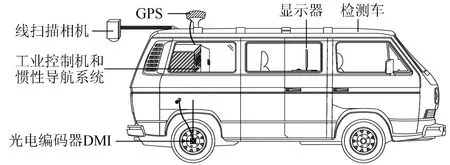
圖2 車載式非錯(cuò)臺(tái)型橋頭沉降檢測(cè)系統(tǒng)Fig.2 Vehicular non-staggered-step bridgehead settlement detection system
2 橋頭沉降計(jì)算方法
2.1 數(shù)據(jù)預(yù)處理
車載式檢測(cè)系統(tǒng)可獲取檢測(cè)車的行駛距離、車速、俯仰角(縱坡度)、橫滾角(橫坡度)、三軸(X/Y/Z)加速度等信息,利用縱坡數(shù)據(jù)和行駛距離,根據(jù)式(1),(2)計(jì)算得各采集點(diǎn)相對(duì)出發(fā)點(diǎn)的高程(出發(fā)點(diǎn)高程記為0),平滑連接行駛距離-高程二維點(diǎn)形成的圖線即為道路縱斷面線。
hi=(Li-Li-1)×sinθi-1,i=2,3,4,…,n,
(1)

(2)
式中,hi為第i點(diǎn)較前一點(diǎn)的高程變化值;Hn為第n點(diǎn)相對(duì)出發(fā)點(diǎn)的高程;n為系統(tǒng)采集的點(diǎn)總數(shù);Li,Li-1分別為第i,i-1點(diǎn)處檢測(cè)車的累計(jì)行駛距離;θi-1為系統(tǒng)采集的第i-1點(diǎn)的俯仰角,上坡為正,下坡為負(fù)。
2.2 橋頭沉降計(jì)算模型及算法
2.2.1 計(jì)算指標(biāo)及閾值規(guī)定
現(xiàn)有研究成果中,描述橋頭沉降狀況的指標(biāo)已有多類,主要包括路橋連接處錯(cuò)臺(tái)高度[12-13]、路橋過渡段工后沉降量[14]、橋接縫前后縱坡差值[15]等。本研究利用橋接縫前后縱坡差值這一指標(biāo)來量化橋頭沉降狀況,與上述研究不同的是,本研究“化線為點(diǎn)”,著重考察研究區(qū)段內(nèi)均勻選取的各點(diǎn)前后縱坡差值,以超過縱坡差閾值的點(diǎn)占取點(diǎn)總數(shù)的比例來評(píng)價(jià)非錯(cuò)臺(tái)型橋頭沉降狀況。上述超過縱坡差閾值的點(diǎn)稱“沉降點(diǎn)”,其比例即本研究提出的計(jì)算指標(biāo),被定義為“沉降點(diǎn)占比”。
沉降點(diǎn)占比的計(jì)算基礎(chǔ)是對(duì)縱坡差閾值的選取,由于以寧波為例開展橋頭沉降研究,故根據(jù)寧波市城市管理局相關(guān)技術(shù)導(dǎo)則[16]對(duì)不同車速下相鄰最大縱坡差的規(guī)定,同時(shí)考慮城市橋梁即城市道路的限速一般為80 km/h,提出了如表1所示的不同車速下的縱坡差閾值規(guī)定。

表1 不同車速下的縱坡差閾值規(guī)定Tab.1 Regulation of longitudinal slope difference thresholds at different vehicle speeds
2.2.2 模型及算法
由于橋頭沉降主要發(fā)生于路橋連接處,故研究區(qū)段應(yīng)為橋接縫前后的一段距離,對(duì)于不設(shè)橋接縫的對(duì)象,試驗(yàn)前應(yīng)在路橋連接處進(jìn)行標(biāo)記,使得能在路面圖像上清晰識(shí)別路橋連接位置。將道路縱斷面線和路面圖像位置對(duì)應(yīng)后,基于圖像在縱斷面線上定位橋接縫,此時(shí),縱斷面線起點(diǎn)為采集開始點(diǎn),重新設(shè)置橋接縫位置為縱斷面線水平方向0點(diǎn),如圖3所示。
計(jì)算模型適用于上橋和下橋兩處的橋頭沉降,下面以上橋?yàn)槔U述計(jì)算模型。如圖3(a)所示,在縱斷面線上定位橋接縫位置點(diǎn),由圖線上的高程突變點(diǎn)定位過渡段起點(diǎn),兩點(diǎn)間的水平距離定義為l0,截取水平方向上-l0~l0范圍內(nèi)的縱斷面線,并在圖線上沿水平方向以Δl為間隔均勻取點(diǎn);如圖3(b)所示,沿水平方向?qū)Ω鼽c(diǎn)前、后l1(l1>Δl)距離拉坡,由于l1大于Δl,故圖3(a)中所取點(diǎn)中僅部分點(diǎn)參與是否為沉降點(diǎn)的判定,將這部分點(diǎn)稱為“有效計(jì)算點(diǎn)”,其數(shù)量定義為ne,各點(diǎn)序號(hào)為k。上述各參數(shù)取值規(guī)則將在下文試驗(yàn)與結(jié)果分析部分?jǐn)⑹觥?/p>
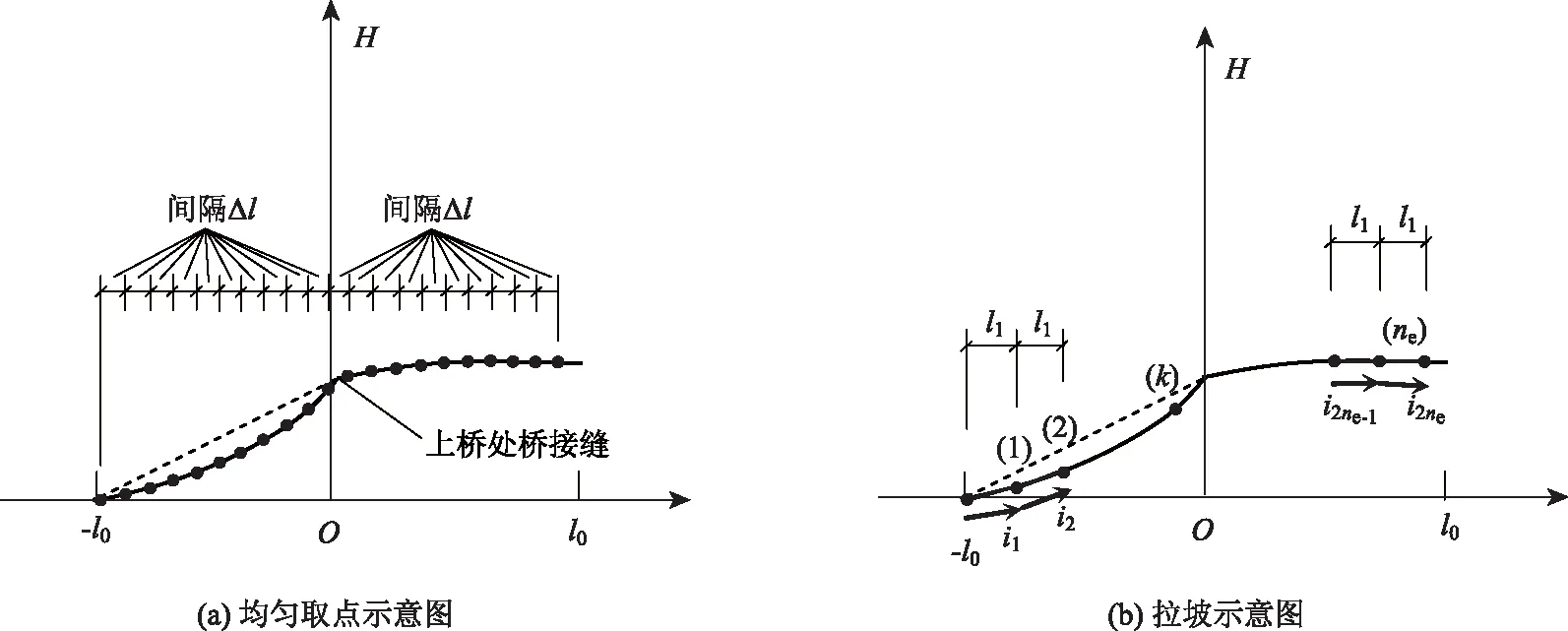
圖3 橋頭沉降計(jì)算模型示意圖(單位:m)Fig.3 Schematic diagram of bridgehead settlement calculation model(unit:m)
非錯(cuò)臺(tái)型橋頭沉降計(jì)算模型如下:
(1)計(jì)算拉坡后各有效計(jì)算點(diǎn)前坡坡度i2k-1(%)和后坡坡度i2k(%):
(3)
(4)
式中,Hk為第k個(gè)有效計(jì)算點(diǎn)的高程;Hk-1為第k-1個(gè)有效計(jì)算點(diǎn)即第k個(gè)有效計(jì)算點(diǎn)前坡起點(diǎn)的高程,H0記為0;Hk+1為第k+1個(gè)有效計(jì)算點(diǎn)即第k個(gè)有效計(jì)算點(diǎn)后坡終點(diǎn)的高程;Hne+1為縱斷面線終點(diǎn)高程;其他符號(hào)同前。
(2)計(jì)算拉坡后各有效計(jì)算點(diǎn)前坡與后坡差的絕對(duì)值Δik(%):
Δik=|i2k-i2k-1|,k=1,2,3,…,ne。
(5)
其中,有效計(jì)算點(diǎn)數(shù)ne按式(6)計(jì)算,結(jié)果取整:
(6)
(3)根據(jù)試驗(yàn)車速確定縱坡差閾值(表1),記為i0,若某有效計(jì)算點(diǎn)前坡與后坡差的絕對(duì)值Δik超過該閾值,則判定該點(diǎn)為沉降點(diǎn),nk記為1,反之記為0,即:
(7)
(4)計(jì)算沉降點(diǎn)數(shù)量N及其占有效計(jì)算點(diǎn)數(shù)ne的比例,即沉降點(diǎn)占比SPR(Settlement Points Ratio):
(8)
(9)
上述計(jì)算模型形成了一種非錯(cuò)臺(tái)型橋頭沉降分析算法,其算法流程圖如圖4所示。基于此算法可編寫相關(guān)計(jì)算機(jī)程序,實(shí)現(xiàn)對(duì)非錯(cuò)臺(tái)型橋頭沉降的自動(dòng)和快速計(jì)算,計(jì)算結(jié)果可為路橋處治決策提供量化參考。
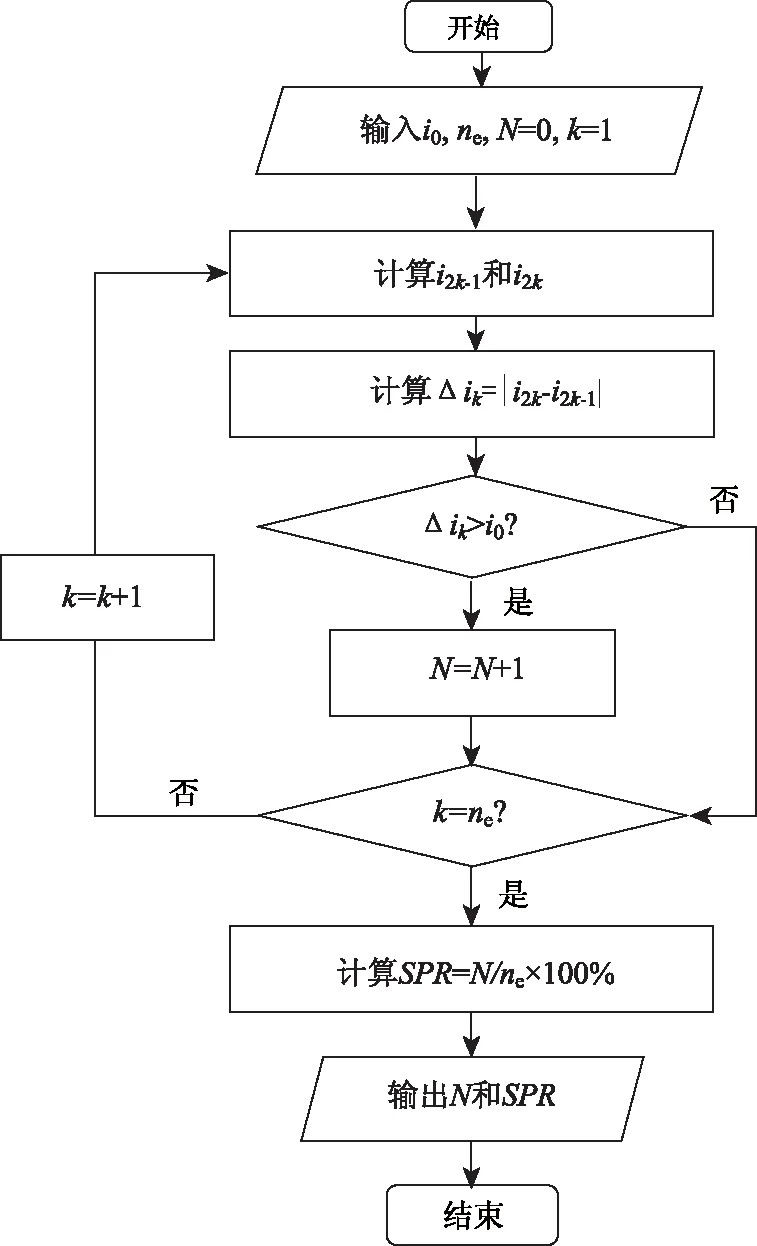
圖4 橋頭沉降檢測(cè)算法流程圖Fig.4 Flowchart of bridgehead settlement detection algorithm
3 試驗(yàn)與結(jié)果分析
3.1 道路縱坡自動(dòng)化檢測(cè)準(zhǔn)確性驗(yàn)證
為保證車載式檢測(cè)系統(tǒng)采集的道路縱坡結(jié)果在容許誤差范圍內(nèi),在正式試驗(yàn)前須先對(duì)其做縱坡自動(dòng)化檢測(cè)的準(zhǔn)確性驗(yàn)證。在此之前已參照《公路路面技術(shù)狀況自動(dòng)化檢測(cè)規(guī)程》[17]有關(guān)距離自動(dòng)化測(cè)量的準(zhǔn)確性驗(yàn)證要求進(jìn)行了試驗(yàn),試驗(yàn)結(jié)果符合《公路路面技術(shù)狀況自動(dòng)化檢測(cè)規(guī)程》[17]和《多功能路況快速檢測(cè)設(shè)備》[18]中距離自動(dòng)化測(cè)量誤差不超過0.1%的規(guī)定,即檢測(cè)系統(tǒng)對(duì)車行距離的自動(dòng)化檢測(cè)符合要求。
選取一條長約150 m、縱坡變化顯著的直線測(cè)試路段,在路段起終點(diǎn)位置做明顯標(biāo)記,并沿行車方向每10 m標(biāo)記一個(gè)測(cè)點(diǎn)位置;利用DSZ05型水準(zhǔn)儀沿行車方向逐一測(cè)量兩相鄰測(cè)點(diǎn)高程,根據(jù)式(10)計(jì)算兩相鄰測(cè)點(diǎn)間的縱坡值,將此結(jié)果作為兩測(cè)點(diǎn)間的已知縱坡,見圖5。此外,利用車載式檢測(cè)系統(tǒng)分別以20,30和40 km/h勻速檢測(cè)測(cè)試路段,系統(tǒng)按0.1 m間距采集縱坡數(shù)據(jù)并以10 m為單位輸出平均縱坡,作為縱坡自動(dòng)化測(cè)量結(jié)果。
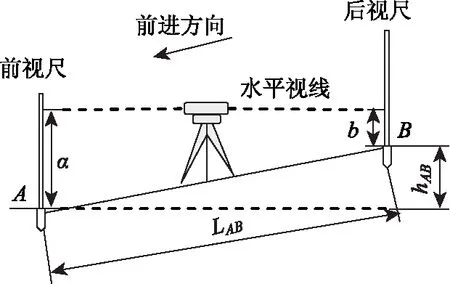
圖5 縱坡自動(dòng)化檢測(cè)準(zhǔn)確性驗(yàn)證人工試驗(yàn)Fig.5 Manual test for verifying accuracy of longitudinal slope automatic detection
(10)
式中,IHM為人工測(cè)量的兩相鄰測(cè)點(diǎn)間縱坡值;hAB為水準(zhǔn)儀測(cè)量的兩相鄰測(cè)點(diǎn)間高差;LAB為兩相鄰測(cè)點(diǎn)間距離,此處取10 m。
對(duì)測(cè)量結(jié)果進(jìn)行誤差分析,選取絕對(duì)誤差(Absolute Error)和相對(duì)誤差(Relative Error)作為縱坡自動(dòng)化測(cè)量的準(zhǔn)確性驗(yàn)證參數(shù),其計(jì)算公式如下:
(11)
式中,EAE為兩相鄰測(cè)點(diǎn)間縱坡測(cè)量的絕對(duì)誤差;ERE為兩相鄰測(cè)點(diǎn)間縱坡測(cè)量的相對(duì)誤差;IAM為車載式檢測(cè)系統(tǒng)以10 m為單位輸出的兩相鄰測(cè)點(diǎn)間的平均縱坡值。
分析結(jié)果見表2,自動(dòng)化和人工測(cè)量的縱坡結(jié)果共15組,分別按0~10,10~20,…,140~150 m 即10 m為單位分布。由表可知,3種車速下的15組縱坡測(cè)量結(jié)果絕對(duì)誤差EAE均小于6%,即同一車速下的所有檢測(cè)值絕對(duì)誤差小于6%。同時(shí),20 km/h車速下0~10,10~20和140~150 m距離范圍內(nèi)的相對(duì)誤差ERE分別為13.25%,10.39%和10.25%,均大于10%,使此車速下有80%的檢測(cè)值相對(duì)誤差小于10%;30 km/h和40 km/h車速下相對(duì)誤差小于10%的檢測(cè)值占比分別為86.67%和100%。20 km/h和30 km/h車速下滿足相對(duì)誤差要求的檢測(cè)值比例雖不足95%,但100%檢測(cè)值的絕對(duì)誤差小于1.5%,即絕對(duì)誤差小于1.5%的檢測(cè)值比例大于95%。綜上所述,上述3種車速下的誤差分析結(jié)果均符合我國JTG/T E61—2014標(biāo)準(zhǔn)規(guī)范中的相關(guān)規(guī)定,證明本研究采用的車載式檢測(cè)系統(tǒng)滿足縱坡自動(dòng)化檢測(cè)的準(zhǔn)確性要求。
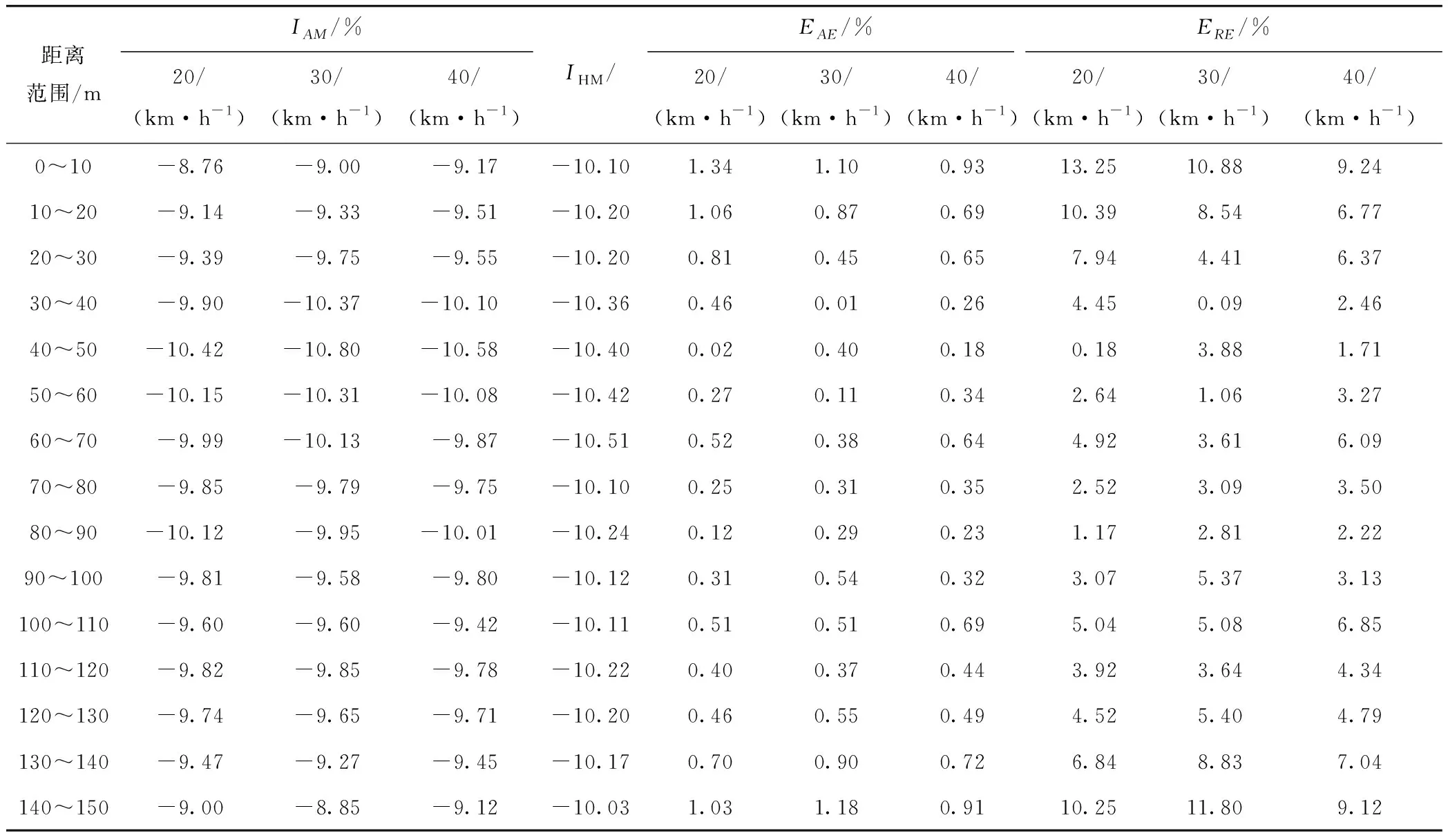
表2 車載式檢測(cè)系統(tǒng)與人工測(cè)量結(jié)果誤差分析Tab.2 Error analysis between vehicular detection system and manual measurement result
3.2 橋頭沉降相關(guān)性分析
3.2.1 自動(dòng)化與人工試驗(yàn)方案
如圖6所示,搭載檢測(cè)系統(tǒng)的檢測(cè)車經(jīng)加速后勻速通過路橋過渡段和橋梁段,采集數(shù)據(jù)與圖像,完成后經(jīng)減速停車。考慮行車安全,并減小車輛顛簸對(duì)試驗(yàn)結(jié)果的影響,檢測(cè)車加速后以不大于40 km/h的車速勻速行駛。基于構(gòu)建的橋頭沉降計(jì)算模型和算法,輸入檢測(cè)系統(tǒng)采集的數(shù)據(jù)和圖像,即得到各試驗(yàn)對(duì)象的沉降點(diǎn)占比SPR。
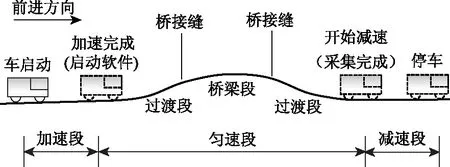
圖6 車載式檢測(cè)系統(tǒng)采集道路縱坡及路面圖像Fig.6 Collecting road longitudinal slope and pavement images by vehicular detection system
同時(shí),考慮到橋頭沉降由路橋間的不均勻沉降產(chǎn)生,通過測(cè)量兩者的縱坡差值來描述橋頭沉降狀況。如圖7所示,利用水準(zhǔn)儀測(cè)量橋接縫處、橋接縫前l(fā)0距離處、橋接縫后l0距離處3點(diǎn)高程,通過式(12)計(jì)算過渡段和橋梁段縱坡值及兩者差的絕對(duì)值。
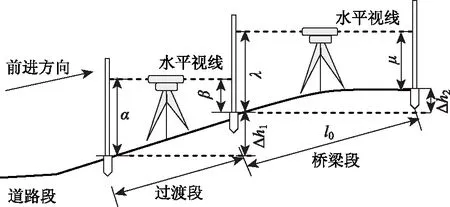
圖7 人工測(cè)量道路縱坡Fig.7 Manual measuring road longitudinal slope
(12)
式中,l0為人工測(cè)量縱坡選取的橋接縫橋前(后)距離,意義同上文計(jì)算模型中相同參數(shù);Δh1,Δh2分別為橋接縫前、后l0距離內(nèi)過渡段、橋梁段高差;I1,I2分別為橋接縫前、后l0距離內(nèi)人工測(cè)量的縱坡值;ΔI為人工測(cè)量的橋接縫前后縱坡差絕對(duì)值。
3.2.2 結(jié)果相關(guān)性分析
在實(shí)際情況下,錯(cuò)臺(tái)型橋頭沉降常發(fā)生在路橋平直連接(無顯著縱坡變化)和橋接縫路面材料顯著剝落的橋頭處,而這里研究的是非錯(cuò)臺(tái)型橋頭沉降,為使提出的檢測(cè)方法適用對(duì)象正確,選取上下橋縱坡變化顯著且橋接縫處無明顯材料剝落的橋梁為試驗(yàn)對(duì)象。
對(duì)于模型參數(shù)的取值,考慮了《標(biāo)準(zhǔn)》[11]對(duì)路面跳車檢測(cè)采樣間隔為0.1 m的規(guī)定和實(shí)際應(yīng)用模型時(shí)取點(diǎn)密度對(duì)計(jì)算結(jié)果的影響,同時(shí)考慮了《導(dǎo)則》對(duì)檢測(cè)車軸距的規(guī)定及實(shí)際應(yīng)用模型時(shí)拉坡長度對(duì)計(jì)算結(jié)果的影響,綜上所述,按如下規(guī)則對(duì)模型參數(shù)進(jìn)行取值:
(1)對(duì)于模型中的l0:精確到0.05 m,根據(jù)試驗(yàn)對(duì)象的縱斷面線不同,其取值不同。
(2)對(duì)于模型中的Δl:當(dāng)l0>5.0 m時(shí),Δl取0.5 m,反之,Δl取0.1 m。
(3)對(duì)于模型中的l1:當(dāng)l0>5.0 m時(shí),l1取2.0 m,反之,l1取1.0 m;
(4)對(duì)于模型中的i0:由于各組試驗(yàn)的檢測(cè)車速均小于40 km/h,按表1規(guī)定,i0取4%。
按上述試驗(yàn)方案、試驗(yàn)對(duì)象和參數(shù)取值原則選取了浙江寧波境內(nèi)的100座橋梁,利用車載式檢測(cè)系統(tǒng)采集其縱坡數(shù)據(jù)和連續(xù)路面圖像,并通過所建立的計(jì)算模型與算法獲得了200組(上、下橋)沉降點(diǎn)占比SPR。同時(shí),按人工試驗(yàn)方案在各試驗(yàn)對(duì)象的上、下橋處測(cè)得過渡段與橋梁段縱坡差絕對(duì)值ΔI,產(chǎn)生200組人工試驗(yàn)結(jié)果,部分結(jié)果如表3所示。
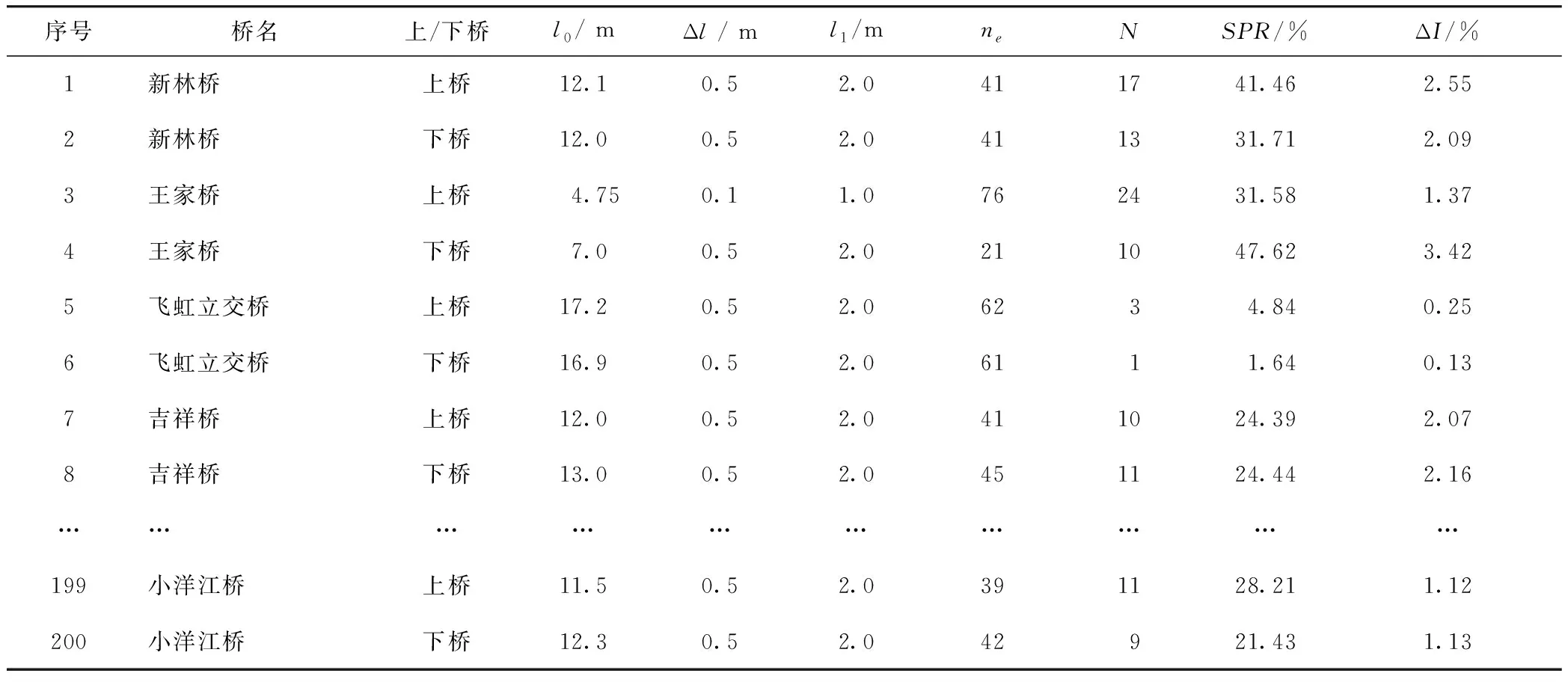
表3 自動(dòng)化與人工試驗(yàn)結(jié)果Tab.3 Result of automatic and manual test
為進(jìn)一步分析計(jì)算模型及算法的輸出結(jié)果和人工測(cè)量結(jié)果的相關(guān)性,將上述200組沉降點(diǎn)占比SPR與人工測(cè)量的縱坡差絕對(duì)值ΔI做相關(guān)性分析,得到兩者的相關(guān)系數(shù)r=0.957 4,p值為0,說明兩者顯著相關(guān)。進(jìn)一步利用Origin軟件建立兩者間的線性回歸模型,模型擬合結(jié)果如圖8所示。分析得,SPR和人工測(cè)量結(jié)果的決定系數(shù)為0.916 6,表明所建立的回歸模型具有較高的擬合精度,進(jìn)而驗(yàn)證了所提出的非錯(cuò)臺(tái)型橋頭沉降檢測(cè)方法及模型參數(shù)取值規(guī)則是科學(xué)合理的。
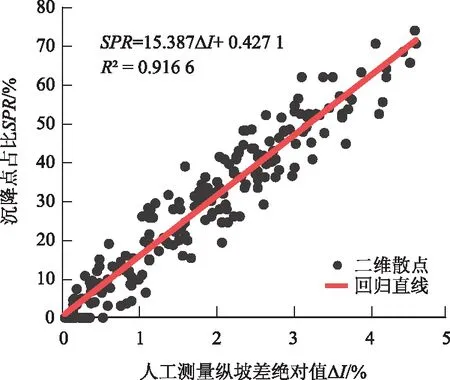
圖8 模型及算法結(jié)果與人工測(cè)量結(jié)果的線性回歸模型Fig.8 Model of linear regression between results of model +algorithm and manual measurement
4 結(jié)論
(1)對(duì)于非錯(cuò)臺(tái)型橋頭沉降,現(xiàn)行國家標(biāo)準(zhǔn)未對(duì)其檢測(cè)方法作出規(guī)定,且現(xiàn)有方法效率低、主觀性強(qiáng)、對(duì)區(qū)段型沉降靈敏度低、易受變形類病害干擾等,針對(duì)上述問題,提出利用車載式檢測(cè)系統(tǒng)快速采集路橋縱坡與路面圖像數(shù)據(jù),形成與圖像位置對(duì)應(yīng)的道路縱斷面線,并基于此建立了非錯(cuò)臺(tái)型橋頭沉降計(jì)算模型與算法,其中提出了一項(xiàng)計(jì)算指標(biāo)即沉降點(diǎn)占比SPR。
(2)對(duì)車載式檢測(cè)系統(tǒng)自動(dòng)化檢測(cè)道路縱坡的準(zhǔn)確性進(jìn)行了試驗(yàn)驗(yàn)證,結(jié)果表明,3種車速下各15組距離梯度的道路縱坡自動(dòng)化檢測(cè)結(jié)果與人工測(cè)量結(jié)果的誤差均符合有關(guān)標(biāo)準(zhǔn)規(guī)范的規(guī)定,即檢測(cè)系統(tǒng)滿足縱坡自動(dòng)化檢測(cè)的誤差要求。
(3)規(guī)定了試驗(yàn)對(duì)象選取和模型參數(shù)取值規(guī)則,在浙江寧波境內(nèi)對(duì)100座橋開展了自動(dòng)化和人工試驗(yàn),對(duì)自動(dòng)化檢測(cè)數(shù)據(jù)利用所建模型與算法輸出了200組(上、下橋)SPR,并將其與人工測(cè)量的200組縱坡差絕對(duì)值ΔI進(jìn)行了相關(guān)性和回歸分析。結(jié)果表明:兩者的相關(guān)系數(shù)為0.957 4,p值為0,回歸模型決定系數(shù)為0.916 6,兩者顯著相關(guān),說明提出的檢測(cè)方法和參數(shù)取值規(guī)則是科學(xué)合理的,能夠準(zhǔn)確定量描述非錯(cuò)臺(tái)型橋頭沉降狀況。
(4)所提檢測(cè)方法填補(bǔ)了橋頭沉降檢測(cè)的研究空白,對(duì)于自動(dòng)化定量檢測(cè)其沉降狀況具有重要的應(yīng)用價(jià)值,但此方法為單車道逐一檢測(cè),針對(duì)一次性檢測(cè)多車道下的橋頭沉降狀況還需深入研究,且未來需添加全國其他地區(qū)的數(shù)據(jù)集,進(jìn)一步優(yōu)化所提檢測(cè)方法,從而增強(qiáng)模型的普適性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19