基于構建等效子集的觀測系統變換
2022-08-02 07:36:06王梅生儲仿東張洪濤高子涵
石油地球物理勘探 2022年4期
關鍵詞:系統
張 華 王梅生 吳 克 儲仿東 張洪濤 高子涵
(①東方地球物理公司采集技術中心,河北涿州 072751;②東方地球物理公司新興物探開發處,河北涿州 072751)
0 引言
隨著地震勘探技術的發展,“兩寬一高”地震觀測系統采集道數越來越多。目前,陸上地震采集的觀測道數呈現跨越式增長態勢,在中國已達到5.0×104道/炮的量級,國際上已開始采用超過1.0×105道/炮量級的地震采集[1],這樣對地震采集裝備資源的需求快速增長,使得地震采集成本日趨增高,采集施工難度越來越大。與此同時,海底節點(電纜)采集能獲得寬方位、寬頻、高信噪比、高保真地震數據,尤其隨著深海油氣勘探力度的不斷加大,海底節點采集將得到越來越廣泛的應用[2-3]。但海底節點數據采集具有成本高,即投放難、回收難,需要二次定位等特點,使得“兩寬一高”地震采集技術在海域的推廣應用,可能面臨比陸上更突出的地震數據采集設備不足問題。陸上可控震源激發和海上氣槍激發均具有成本低、可重復激發的特點,“以炮代道”觀測系統變換(變觀)技術對解決寬方位、高密度觀測系統的地震采集設備不足、減少海上地震采集設備工作量提供了思路,為“兩寬一高”地震勘探技術的推廣拓展了空間。
近年來,陸上和海上不同的地震探區嘗試了各種以炮代道的變觀方式,實施地震數據采集,并以不同形式展示了各自的勘探成果。
袁全社等[4]對北部灣盆地WS區的正交束狀觀測系統和片狀觀測系統進行對比分析,認為片狀觀測系統優于正交束狀觀測系統。張金淼[5]在渤海某靶區開展了正交寬方位觀測系統與Patch 寬方位觀測系統對比,認為正交束狀的寬方位觀測系統方案明顯優于 Patch寬方位觀測系統。何進勇等[6]對比了復合觀測系統與Patch觀測系統,通過屬性分析認為復合寬方位觀測系統在觀測系統屬性、面元屬性和照明效果上都優于Patch觀測系統。
張慕剛等[7]提出將常規觀測系統分別轉化為橫向推拉式、縱向推拉式、縱橫向聯合推拉式三種觀測系統,以便減輕高效地震采集模式下接收設備的壓力,并可大幅度地提高施工效率。張懷[8]在保證橫向最大炮檢距一致的前提下,提出了炮點分別重復2倍、3倍、4倍的三種橫向推拉式觀測系統。吳安楚等[9]在中東大沙漠區將常規三維觀測系統改進為橫向推拉式的觀測系統,方便震源在遠排列進行交替或滑動掃描施工,提高了施工效率,并且節省一半采集設備。
龔旭東等[10]充分利用縱向大十字技術,成功將陸上寬方位排列片推廣到海上地震采集,相比常規海上拖纜地震采集,增加了橫向信息和采集方位,提高了復雜地質體照明度。柳興剛等[11]在蘇丹復雜區采用大十字觀測系統代替常規高密度寬方位觀測系統,在有限地震采集設備條件下,成功實施了高密度、寬方位地震采集。
馮凱等[12]將陸上觀測系統排列片橫向寬度轉換為炮線長度,炮線長度轉換為排列片寬度,從而實現陸上束狀觀測系統向海洋觀測系統過渡。李海軍等[13]則將氣槍ISS高效作業模式成功地應用于平行觀測系統。
以炮代道變觀技術在不同的地震勘探階段,為解決地震采集項目難題發揮著重要作用,也基本滿足了項目技術需求。但早期的以炮代道地震采集觀測系統,尤其是海上采用的以炮代道觀測系統,較少考慮觀測系統等價變換,觀測系統分析也很少做資料分選處理,導致不同地區觀測系統類型對比差異較大,面元屬性差,勘探精度低。
21世紀以來,中國陸上油氣勘探的重點迅速向復雜構造、地層巖性、碳酸鹽巖和非常規儲層等四個領域轉移[1];海上油氣勘探開發也面臨從淺層向中深層、由構造油氣藏向復雜巖性油氣藏轉移的新態勢[5]。隨著勘探難度的不斷增大,對地震勘探采集技術的要求越來越高。觀測系統方式近年來也發生了悄然變化,如海上多方位、全方位拖纜向海底節點(電纜)正交寬方位轉變,陸上常規窄方位觀測系統向高密度、寬方位觀測系統轉變,都在主動適應高精度勘探的要求。“兩寬一高”地震勘探是高精度地震勘探的必然選擇。高精度地震勘探對變觀技術提出了更高要求。
以往文獻雖提出了不同的變觀方案和實踐,但大多未做深入的變觀分析。本文針對目前流行的正交觀測系統變換進行研究分析,從技術需求出發,提出變觀的設計目標和設計原則,分析了十字子集在變觀中的關鍵作用,剖析了基本觀測系統變換及其典型案例,提出了較系統的變觀理論,對變觀設計、分析和研究具有借鑒作用和現實意義。
1 設計目標及設計原則
基于炮道互換原理的變觀評價標準分為兩個層次。一是基本屬性及特性評價,滿足需求是變觀設計的基礎要求。觀測系統的基本屬性主要是基于疊加成像、構造解釋需求等方面的屬性,如覆蓋次數、炮檢距、照明能量等,若變觀設計的基本屬性不能滿足需要,則變觀設計毫無意義。二是基于精細勘探需求的特殊屬性及評價,滿足精細勘探的需求。“兩寬一高”地震采集技術的推廣,標志著地震勘探已全面進入精細勘探階段,基于OVT處理、解釋技術的發展和應用,對提高構造解釋、裂縫預測、儲層預測及流體檢測等方面的精度發揮著越來越重要的作用。對于高精度勘探,在觀測系統設計階段就已考慮到高精度成像、巖性反演需求的采集參數,現場實施的變觀設計須等價于原觀測系統,以保證地震采集工程技術設計的勘探精度,完成既定的勘探目標和地質任務。
因此,高精度勘探的變觀設計不僅要求覆蓋次數、成像效果等一致,而且炮檢距和對應的方位角要與原設計的觀測系統完全一致。基于炮道互換原理的變觀設計須符合以下兩條原則:
(1)變觀前、后滿覆蓋區域相同子區內,相應面元炮檢矢量完全相同;
(2)變觀后滿覆蓋區域相同子區內,相應面元炮檢矢量完全包含原觀測系統的炮檢矢量,且能通過處理手段消除“多余”的炮檢矢量。
為符合上述兩項原則,一方面,觀測系統變化前、后的炮點距與檢波(接收)點距須保持一致,即面元一致性;另一方面,變化后觀測系統應包含原觀測系統所有縱、橫向炮檢距信息,也就是縱、橫向炮檢距的一致性。
2 十字子集的用途
一個正交三維地震采集的觀測系統具有唯一的十字子集。Vermeer在《三維地震勘探設計》專著[14]中介紹了構建十字子集的方法,即確定一條檢波(接收)線,再找出與該條檢波線相關的全部炮點,這條檢波線與對應的全部相關炮點線就構成了十字子集。十字子集在地震數據處理中發揮著重要作用。在十字排列基礎上,根據縱、橫向炮、檢線距劃分為不同的子區,每個子區具有大致相同的炮檢距和方位角,形成一個OVT向量片;將不同十字子集相同位置關系的OVT向量片抽取出來,形成覆蓋全區的單次覆蓋數據體,即OVT道集[15-17]。OVT道集是三維地震資料OVT處理、解釋的基礎。
十字子集數據體體現了現場采集數據在縱、橫向最高密度采樣特性,有效波和相干噪聲在十字子集域中采樣最充分。若采集設計的炮、檢點采樣間隔能滿足空間采樣定理,則有效波和相干噪聲特征最明顯且容易識別。有效波在XYT三維域中為時間梯度小且平緩變化的雙曲面,而線性干擾為時間梯度大且相對恒定的圓錐曲面(圖1),兩種曲面在相交處有相同的波至時間。有效波與線性干擾波的視速度和波數差異較大,地震數據從XYT域變換到KKF域,最易將其分開,這對信噪分離和線性噪聲壓制具有十分重要的意義。在計算機性能高速發展的現今,十字子集域去噪方法已經成為相干噪聲壓制的常規處理手段。薛超[18]和公亭等[19]分別在黃土塬和柴達木英雄嶺地區的地震數據處理中運用了十字排列去噪技術,取得了良好的成像效果。
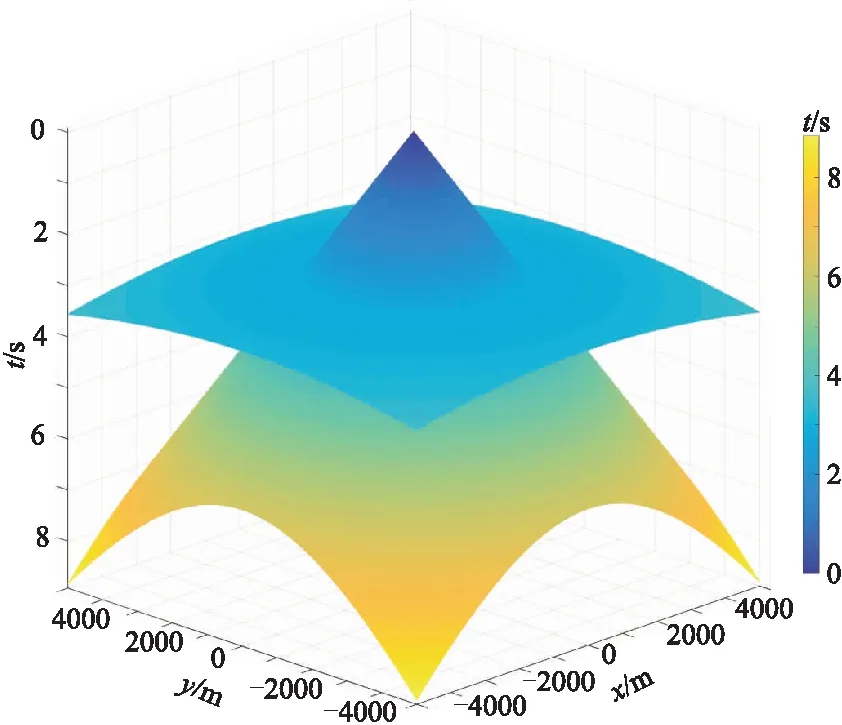
圖1 十字子集域線性干擾與有效波時距曲面
十字子集排列,通過炮—道互換原理,可等效為“一個”炮點激發、四周布滿檢波點的共炮集數據。十字子集在變觀中也發揮重要作用。
目前,陸上常規三維地震采集觀測系統中炮點大多分布在最中間的兩條檢波線之間,本文將同一炮線的相鄰檢波線間的全部炮點稱為一組炮。圖2為陸上常規三維觀測系統(4線×2炮×8道)的一個簡單模型,其炮、道距為100m,炮、檢線距為200m,一組炮包含兩炮。由常規觀測系統(圖2)建立了十字子集排列(圖3),該十字子集排列的炮、道距與常規三維觀測系統相同。
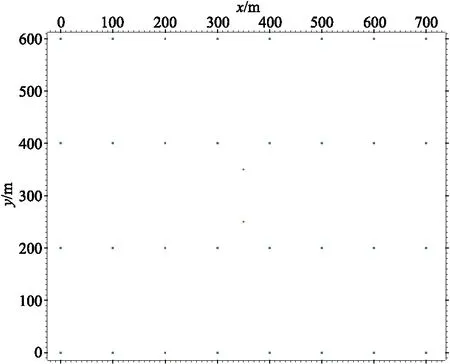
圖2 陸上常規三維地震觀測系統模型
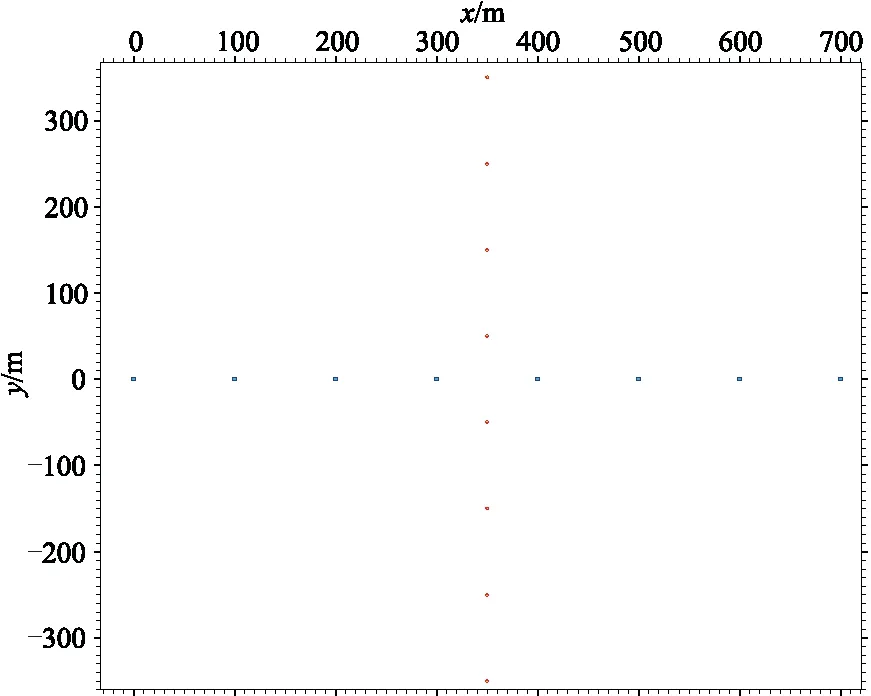
圖3 十字子集排列
首先考察十字子集排列與原觀測系統是否等價。若這兩種觀測系統對應面元的炮檢距和方位角完全一致,就可認為這兩種觀測系統是等價的。
圖4為由原觀測系統分析得到的各面元上的一次炮檢矢量分布(排列縱橫向未滾動);圖5為由構建的十字子集排列分析得到各面元的一次炮檢矢量分布。兩者一次覆蓋的面元個數是相同的,但對應面元上的炮檢距和方位角均不相同。
圖4在垂直測線方向上隨著面元由反射區中心位置向外移動,炮檢距不是逐漸增大,而是呈跳躍變化;圖5則無論是沿測線方向,還是垂直測線方向,隨著面元由反射區中心向外移動過程中,炮檢距都是逐漸增大,方位角也平緩變化。
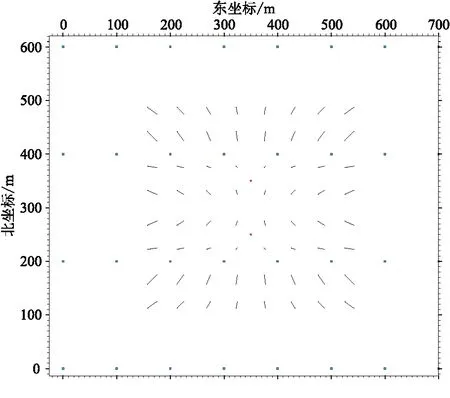
圖4 常規三維地震觀測系統模型一次炮檢矢量分布
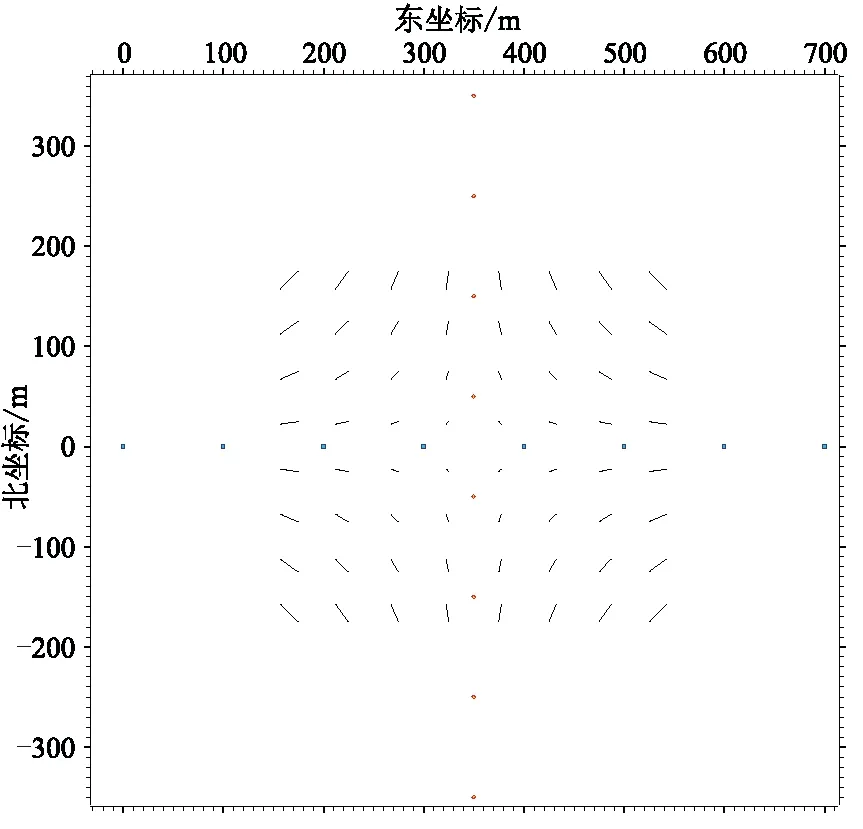
圖5 十字子集排列一次炮檢矢量分布
觀測系統的對比分析,還可通過對其滿覆蓋區內相鄰檢波線與相鄰炮線所圍子區的炮檢距與方位角的綜合對比分析來實現。對于給定滿覆蓋區域的一個面元,作用于該面元每個“炮檢對”稱為一個炮檢矢量,方向從炮點指向檢波點,長度為炮點到檢波點的距離;將所有有貢獻于該面元的炮檢矢量起點置于面元中心,就形成滿覆蓋區域的“蜘蛛圖”。滿覆蓋區域每個子區內不同面元上的蜘蛛圖都不相同,但不同子區對應面元位置的蜘蛛圖是相同的。滿覆蓋區相同子區內對應面元位置的蜘蛛圖相同與否可作為觀測系統是否等價的判斷指標。
圖6、圖7分別為原觀測系統和構建十字子集排列縱、橫向分別滾動4次后形成的滿覆蓋“蜘蛛”圖(不同顏色表征不同覆蓋次數)。可見兩者同一子區內對應面元位置的“蜘蛛”圖完全一致(炮檢矢量對比數據見附表1)。也說明圖4、圖5炮檢距矢量空間分布位置雖不同,但它們卻包含相同的炮檢距矢量數據,圖5是圖4炮檢距矢量的空間重排。
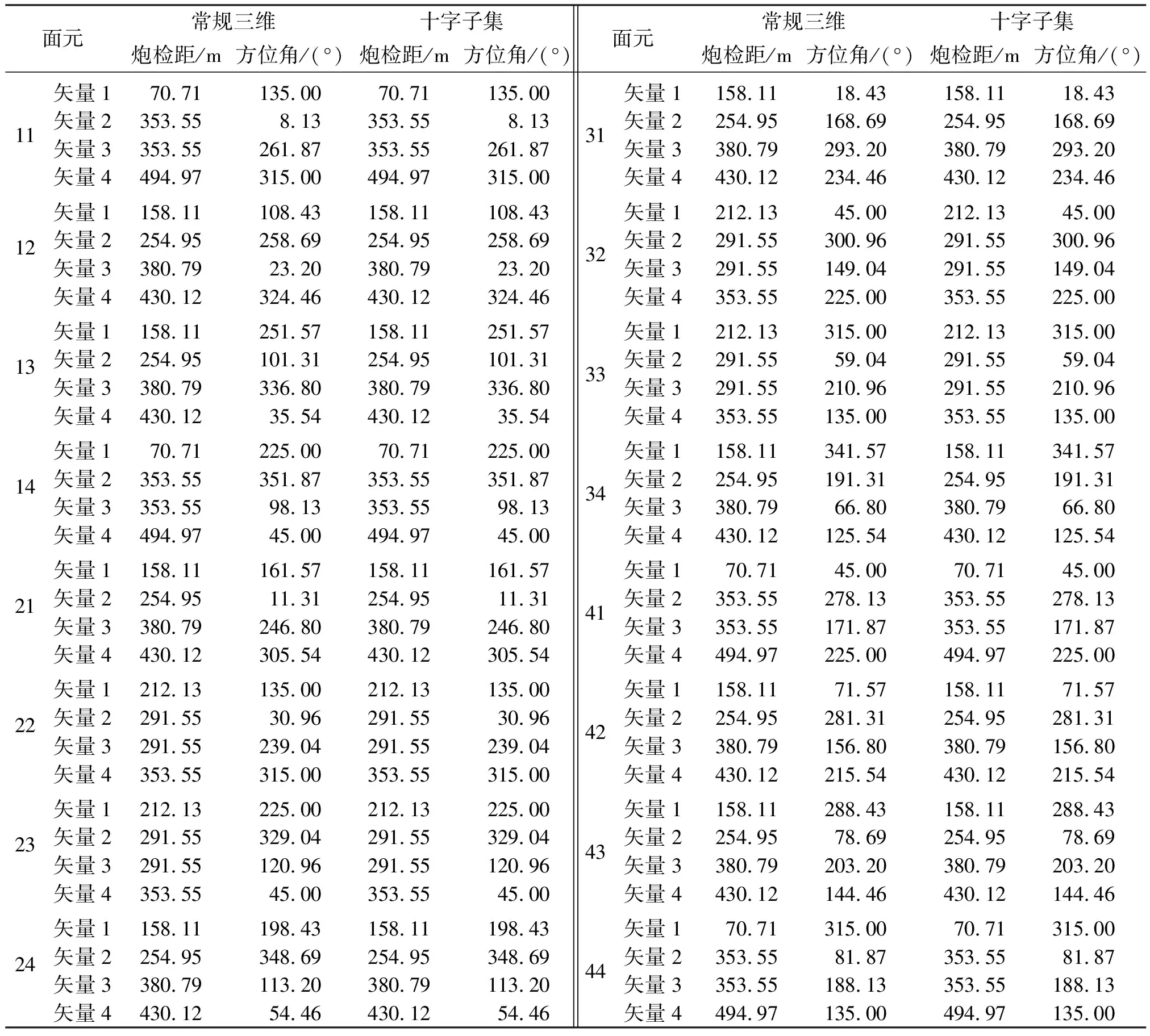
附表1 常規三維模型與十字子集滿覆蓋區相同子區對應面元內炮檢矢量對比數據
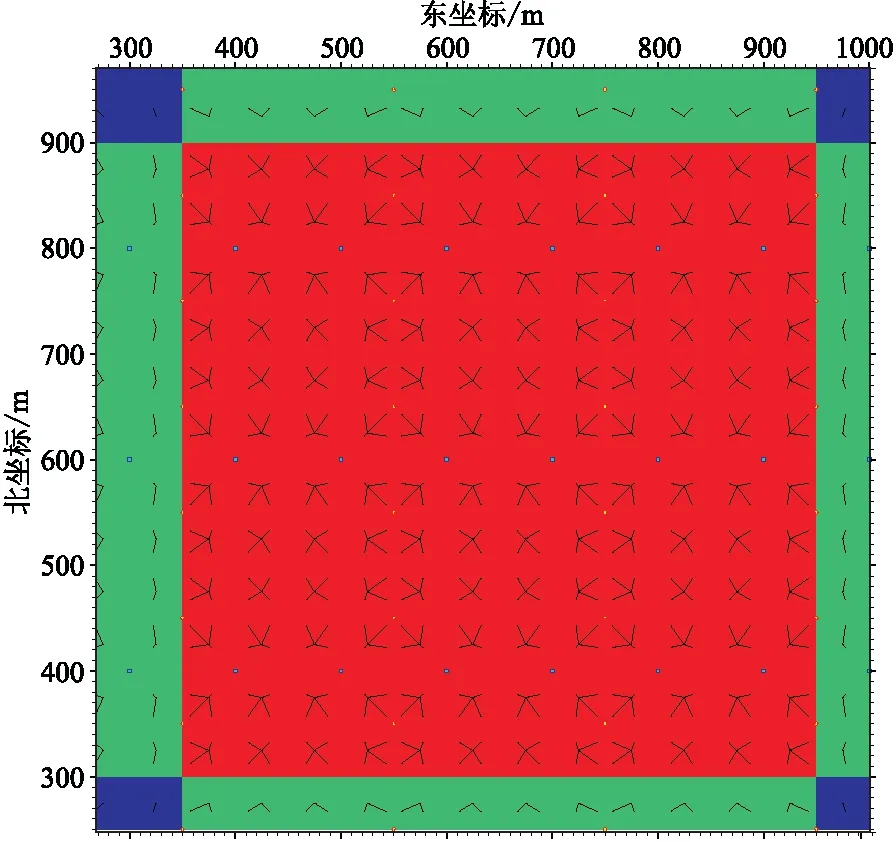
圖6 常規三維地震觀測系統模型滿覆蓋“蜘蛛”圖
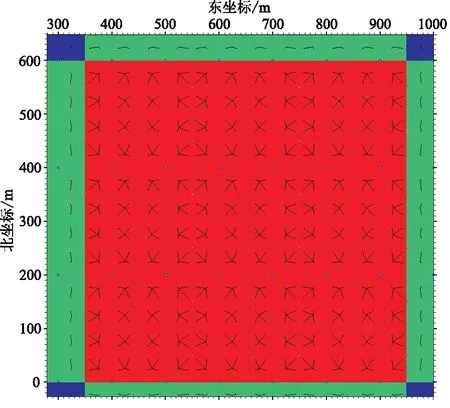
圖7 十字排列滿覆蓋“蜘蛛”圖
十字子集排列與常規陸上三維地震觀測系統包含相同的炮檢矢量,排列縱、橫向滾動后,滿覆蓋區具有完全相同的炮檢矢量組合。因此,在變觀設計時,只要變換后的觀測系統所構建的十字子集與原觀測系統的十字子集相同,則可認為變換前、后的觀測系統是等價的。由此可見,十字子集是聯結不同觀測系統等價變換的紐帶。
3 兩種基本的觀測系統變換
目前,基于相同十字子集的變觀設計主要有兩種基本形式,即推拉式觀測系統和大十字觀測系統。大多數正交觀測系統變換都是推拉式或大十字觀測系統中的一種或兩者的交互應用。
3.1 推拉式觀測系統
推拉式觀測系統(圖8)是在常規三維地震觀測系統(圖2)的基礎上,將檢波線數減至常規三維地震觀測系統的一半,炮點由原來布設在中間兩條檢波線之間的一組炮,改變為布設在接收排列兩側的兩組炮(圖8)。推拉式觀測系統縱、橫向滾動距與原觀測系統的相同,即縱向以炮線距滾動,橫向以檢波線距滾動。推拉式觀測系統檢波線數減半,橫向通過增加一組炮,使得橫向反射點數和反射點距與原觀測系統相同,在同樣的橫向滾動距下,橫向滿覆蓋次數與原觀測系統保持相同,即等于推拉式觀測系統檢波線數(原觀測系統檢波線數的一半)。推拉式觀測系統檢波線數減少一半,而橫向炮數則增加了一倍。
從推拉式觀測系統很容易提取與原觀測系統完全相同的十字子集(圖3)。因此,推拉式觀測系統與原觀測系統完全等價。圖9為推拉式觀測系統(圖8)的一次炮檢矢量分布,可見其與原觀測系統炮檢矢量分布(圖4)有所不同,為原觀測系統炮檢矢量分布的中間線分開后反折分布,包含了相同的炮檢矢量。圖10為推拉式觀測系統縱、橫向滾動4次滿覆蓋的“蜘蛛”圖,比較圖10與圖6可知,推拉式觀測系統與原觀測系統的滿覆蓋區對應面元具有完全一致的炮檢矢量分布。
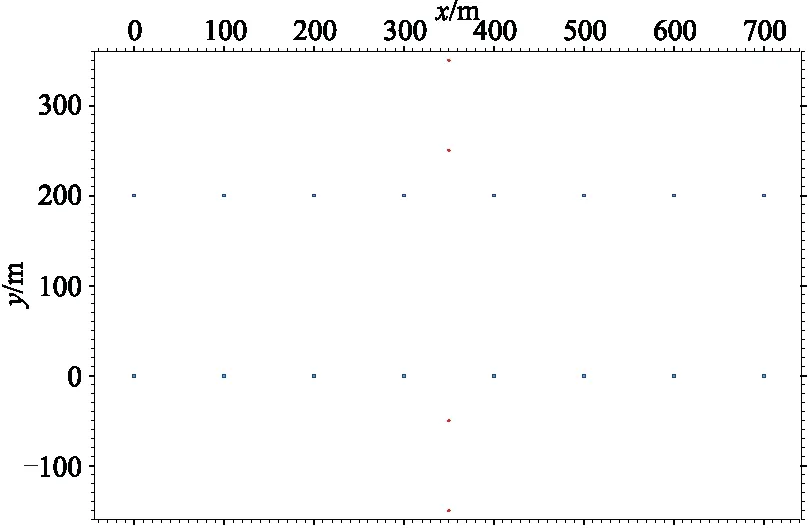
圖8 推拉式觀測系統模型
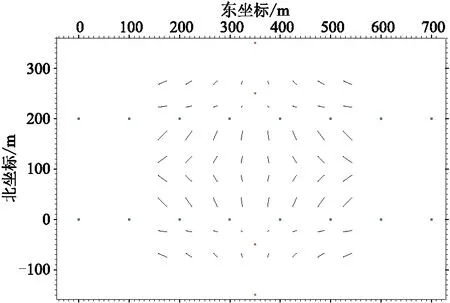
圖9 推拉式觀測系統模型一次炮檢矢量分布
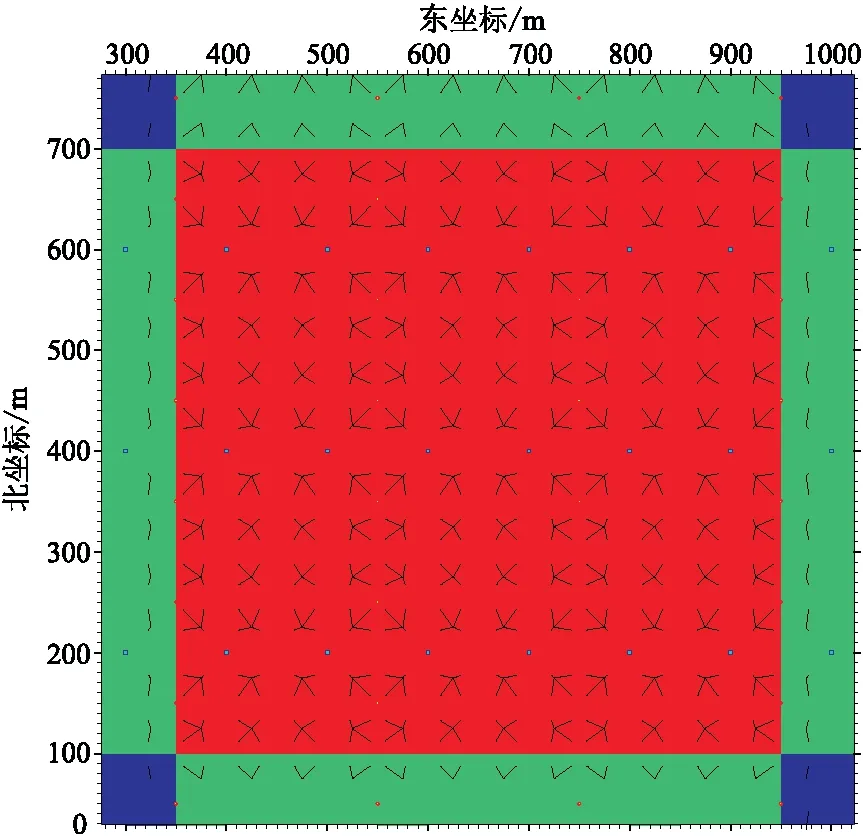
圖10 推拉式觀測系統模型滿覆蓋“蜘蛛”圖
推拉式觀測系統上側炮組和下側炮組所產生的炮檢矢量分別構成滿覆蓋“蜘蛛圖”的下部與上部。當且僅當排列片橫向滾動后,只有上、下兩組炮點位置完全重合的條件下,滿覆蓋面元內才能形成完整的“蜘蛛圖”,這是應用推拉式觀測系統的前提條件。推拉式觀測系統通過排列兩側炮點橫向滾動后的炮點重復,實現面元炮檢矢量全方位組合,達到與原始觀測系統面元屬性完全相同的目的。
張懷[8]提出由常規三維地震觀測系統(圖11)變換為三種推拉式觀測系統形式。第一種為基本推拉式觀測系統(圖12);第二種推拉式觀測系統(圖13)是將檢波線數選為原觀測系統的1/3,重復3倍放炮;第三種推拉式觀測系統(圖14)的檢波線數為原觀測系統的1/4,重復4倍放炮。后兩種推拉式觀測系統是基本推拉式觀測系統的延伸形式。此三種觀測系統有一個共同特點,即其十字子集完全相同。根據這一原則,還可設計出更多的推拉式觀測系統形式。推拉式觀測系統的線數應設定為原觀測系統線數的因數,推拉式觀測系統的炮點位置即為該線數的原觀測系統炮點位置。可將十字子集排列看成是檢波線數最少的一種特殊的推拉式觀測系統。
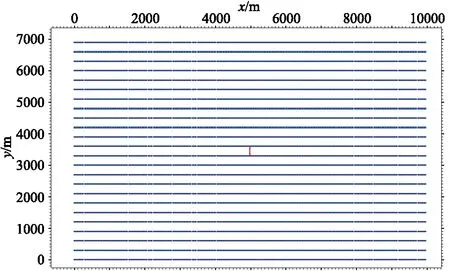
圖11 常規三維地震觀測系統
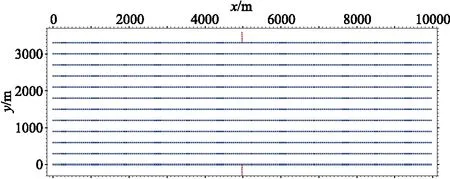
圖12 每個炮點激發二次觀測系統(檢波線數為常規1/2)
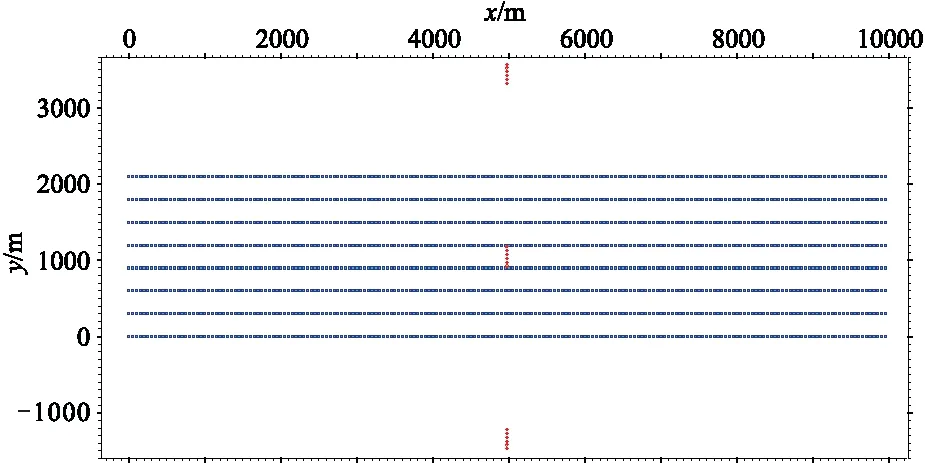
圖13 每個炮點激發三次觀測系統(檢波線數為常規1/3)
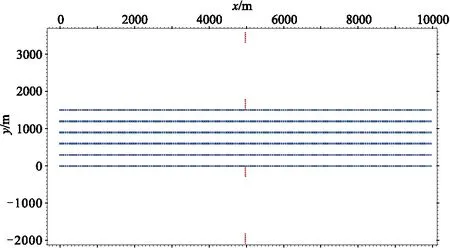
圖14 每個炮點激發四次觀測系統(檢波線數為常規1/4)
推拉式觀測系統的優點是與原觀測系統完全等價,不產生冗余炮檢信息,缺點是檢波線數選擇相對受限。推拉式觀測系統適用于激發成本相對較低、激發效率相對較高的工區,如陸上可控震源激發。顯然,三維地震高效采集項目更適合應用推拉式觀測系統。推拉式觀測系統與其他觀測方式聯合,也適用于海上地震勘探。
推拉式觀測系統是炮點與檢波點相對位置關系的一種觀測方式。一般采用橫向推拉方式,即炮點橫向布設在排列兩側;也可采用縱向推拉方式,即炮點縱向布設在排列兩端,還可采用縱橫向聯合推拉方式。圖15為由陸上常規三維觀測系統模型(圖2)變換的縱、橫向聯合推拉式觀測系統,道數減至原排列片的1/4,炮數是原觀測系統的4倍。這與張慕剛等[7]提出的三種推拉式觀測系統相一致。
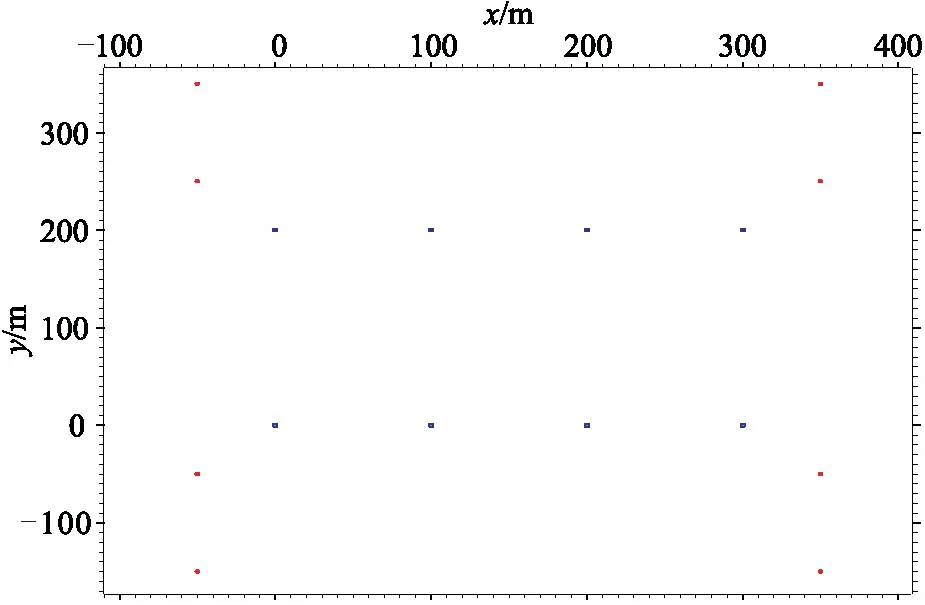
圖15 縱橫向聯合推拉式觀測系統模型
3.2 大十字觀測系統
大十字觀測系統為一條炮線與若干條檢波線組成正交觀測的一種炮、檢關系(圖16)。大十字觀測系統檢波排列的所有炮點一次采集完成,排列橫向整體“搬家”(移動),每條檢波線移動前必須采集完十字子集所有橫向信息。滿足大十字觀測系統的每條檢波線都包含原觀測系統十字子集信息,大十字檢波排列外炮線(附加炮)長度設計為十字子集炮線長度,大十字觀測系統的總炮數必然多于十字子集炮數(一條檢波線除外)。因此,大十字觀測系統與原觀測系統并不完全等價,相對于原觀測系統,會產生橫向冗余炮檢距信息。
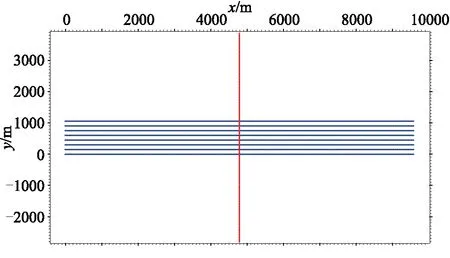
圖16 大十字觀測系統
由十字子集構建過程可知,十字子集單邊炮線長度等于原觀測系統橫向最大炮檢距,炮組數等于原觀測系統的檢波線數。由此得到大十字觀測系統與原觀測系統采集參數之間的關系,即大十字觀測系統的附加炮組數與原觀測系統的檢波線數相等。
大十字觀測系統檢波線數選擇,原則上是可任意的,但大十字觀測系統的檢波線數越少,重復炮數就越多,橫向炮檢距冗余就越少;檢波線數越多,重復炮數就越少,橫向炮檢距冗余就越多。大十字觀測系統與原設計觀測系統采集的炮工作量之比符合以下關系
(1)
式中:Nrl表示原觀測系統檢波線數或大十字觀測系統的附加炮組數;nrl表示大十字觀測系統檢波線數。
從式(1)可知:大十字排列檢波線數nrl越大,M越小,即重復炮越少;大十字排列檢波線數越少,重復炮越多,一條檢波線達到驚人的Nrl倍炮。式(1)有助于根據地震采集設備的投入、工區部署、激發成本等因素,確定效益最大化的采集方式。
大十字觀測系統一次橫向采集產生的橫向冗余炮檢距數量可表示為
(2)
式中ns表示一組炮所含炮數。
由式(2)可看出,大十字觀測系統橫向冗余炮檢距數量與大十字觀測系統的檢波線數是二次函數關系,也與每組炮數ns有關。隨著大十字觀測系統的檢波線數增加,橫向冗余炮檢距數量增加很快,一條檢波線的大十字觀測系統沒有橫向冗余炮檢距信息。
大十字觀測系統每一條檢波線的十字子集均不相同,要保持與原觀測系統完全等效,只需剔除每條檢波線中大于原觀測系統橫向最大炮檢距的炮即可,常用的處理手段是橫向限炮檢距處理。只要大十字觀測系統每條檢波線在選定的橫向限炮檢距范圍內都有正常炮點分布,限炮檢距后覆蓋次數即是均勻的,限炮檢距后的覆蓋次數等于限炮檢距范圍內的炮組數。保證大十字觀測系統每條線橫向都有正常炮點分布最大范圍是大十字觀測系統附加炮線長度,即十字子集單邊炮線長度,也就是原觀測系統橫向最大炮檢距,該范圍內炮組數等于原觀測系統檢波線數的一半,即大十字觀測系統最大橫向有效限炮檢距后,覆蓋次數等于原觀測系統覆蓋次數,數據的炮檢矢量也與原觀測系統完全相同。
如果將大十字觀測系統橫向冗余炮檢距作為有效信息使用,要注意這些冗余炮檢距對數據精度的影響程度,冗余炮檢距會不同程度產生地震數據“采集腳印”現象。當橫向冗余炮檢距作為有效信息使用時,大十字觀測系統橫向覆蓋次數的均勻設計是有必要的。一方面,大十字觀測系統接收排列兩邊的炮線長度不小于十字子集兩邊的炮線長度,檢波線數選擇也不是任意的。大十字觀測系統橫向搬家前,橫向反射點數(每組炮選一個點)及覆蓋次數相互關系可表示為一個梯形模板(圖17紅色折線),梯形模板的滿覆蓋點數等于附加炮組數,最高滿覆蓋次數為大十字排列檢波線數,覆蓋次數漸減帶點數(含一個滿覆蓋點)也等于大十字排列檢波線數,點距為半個檢波線距。

圖17 大十字觀測系統梯形模板及橫向推演示意
梯形模板橫向滾動,每次滾動2nrl個點,滿覆蓋點總數被2nrl分若干次后,當剩余滿覆蓋點數為nrl時,相關梯形模板的覆蓋次數漸減帶才能無縫銜接成正常滿覆蓋次數,達到橫向上滿覆蓋次數的均勻
(3)
式中k為自然數。將式(3)化簡
(4)
由此不難得到滿足橫向滿覆蓋次數均勻條件公式
(5)
式中:Ns為大十字觀測系統設計總炮數;ds為炮點距;Rli為檢波線距;K為非零自然數。式(5)表明,大十字觀測系統排列片的設計總炮點數乘以炮點距與檢波線數乘以檢波線距之比應為偶數,橫向滿覆蓋次數才是均勻的。因與大十字觀測系統的炮數、檢波線數等參數的關系更明晰,所以更方便、實用。
大十字觀測系統檢波線數選擇靈活,項目實施不受地震采集設備道數限制,較少采集設備道數也能進行寬方位、高密度地震勘探。大十字觀測系統的另一優點是排列整體搬家,不需重復收放檢波器等接收設備,可大大減輕海底節點、電纜等重復收放的工作量,因此該技術也被廣泛地應用于海上地震勘探。大十字觀測系統的缺點是重復放炮量較大,橫向上不同程度地產生炮檢距冗余,降低了激發炮的利用率。
大十字變觀技術與推拉式觀測系統一樣,也是炮點與檢波點相互位置關系的一種觀測方式,不但適用于橫向觀測,也適用于縱向觀測。
大十字觀測系統橫向上排列整體搬家滾動,縱向上滾動距與原觀測系統相同,即一個炮線距。陸上地震勘探大多單獨使用大十字觀測系統;海上應用大十字觀測技術時常與其他以炮代道觀測技術聯合進行。縱、橫向均采用大十字觀測技術的觀測系統稱為“Patch”排列片,“Patch”觀測系統是與接收排列所有相關炮點一次采集完成,然后排列片以橫向檢波線數、縱向接收道數為滾動距,實施整體搬家。“Patch”觀測系統的施工組織較靈活,早期海上地震勘探運用較多。“Patch”觀測系統缺點是重復炮量大,冗余炮檢信息更多。
大十字觀測中檢波線數(道數)設定更靈活、自由,對于“Patch”觀測系統,原則上“單道”也能實現寬方位、高密度地震勘探,它是以海量重復激發炮數為前提的。
當橫向采用推拉式觀測、縱向采用大十字觀測時,推拉式的橫向兩組炮疊加大十字觀測模式,就形成兩個炮線束,平行分布在排列兩側,這種觀測系統常被稱為平行觀測系統(圖18)。平行觀測系統采用橫向滾動一條檢波線、縱向上排列整體搬家的滾動方式,兼顧了“Patch”觀測系統海上勘探優點,最大程度減少了重復炮。目前,平行觀測系統成為海上地震勘探的常用觀測系統。平行觀測系統的施工順序一般先橫向滾動采集,后縱向采集。由于排列片縱向整體搬家,可根據工區部署情況和采集設備投入量,將工區劃分為若干塊進行采集,每塊稱為一個“Zipper”(有時也稱作“Tier”),根據Zipper長度設計接收排列長度和接收道數。

圖18 平行觀測系統
4 應用實例
4.1 東非M探區大十字觀測系統變換
在東非M探區進行地震勘探時,油公司給定的三維地震采集觀測系統模板為48線×6炮×384道,檢波點、炮點距均為25m,檢波線、炮線距均為150m,排列片縱、橫向滾動距分別為炮、檢線距(150m),采用可控震源激發。按照該觀測系統施工,排列片總道數為18432。考慮到排列滾動時的備用線,所需投入的儀器采集道數至少要達到40000,而當時在該區所擁有儀器采集道數尚不足15000,重新調集或購置儀器將會延誤工期。
在此情況下,只能嘗試以炮代道的變觀方案。甲方油公司接受變觀進行現場數據采集的動議,但強調變觀采集的地震資料信息不少于原設計觀測系統應獲取的地震信息,且通過處理手段可獲得原設計方案能獲取的所有資料成果。在反復權衡所具備的接收道數能力和處理方法的基礎上,最終采用的以炮代道方案為大十字觀測系統,其模板為16線×384炮×384道(圖19)。炮、道距和炮、檢線距等采集參數均與原觀測系統相同,大十字橫向滾動16條檢波線(2400m),縱向滾動一條炮線(150m)。
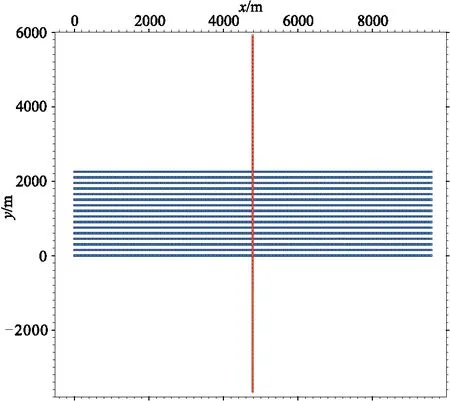
圖19 東非M探區實施的大十字觀測系統
原觀測系統模板檢波線數為48、炮點數為6,變觀后的大十字觀測系統檢波線外每側炮點應不少于144個,而實際設計的大十字觀測系統每側炮點為147個,包含了原設計觀測系統十字子集信息。從橫向滿覆蓋次數均勻性分析,大十字觀測系統總炮數乘以炮點距與檢波線數乘以檢波線距之比為4,符合比值為偶數的要求。大十字觀測系統的附加炮組數比十字子集多一組(6)炮,充分地考慮并達到了橫向覆蓋次數均勻。該項目采用大十字觀測系統采集后,檢波線數降為原設定數的1/3,炮數是原設計方案的4倍。
采用的大十字觀測系統橫向最大炮檢距為5912.5m(原設計為3587.5m),總覆蓋次數達到1024(比原設計增加256次),總炮道密度也增加了。將大十字觀測系統橫向滾動3次、縱向滾動42次,獲得縱向滿覆蓋次數32、滿覆蓋長度1650m;橫向滿覆蓋次數32、滿覆蓋寬度3675m的包含大十字排列全部炮檢信息特征的滿覆蓋資料區域。
圖20為大十字觀測系統滿覆蓋區的最大炮檢距分布,藍色區面元的最大炮檢距小,紅色區面元的最大炮檢距大,具有在橫向上分塊、條帶狀分布的特征,最大炮檢距相差達1km;大十字排列橫向滾動銜接部位滿覆蓋區(中間1/3條帶寬度)與其他滿覆蓋區的最大炮檢距分布在細節上也存在差異。
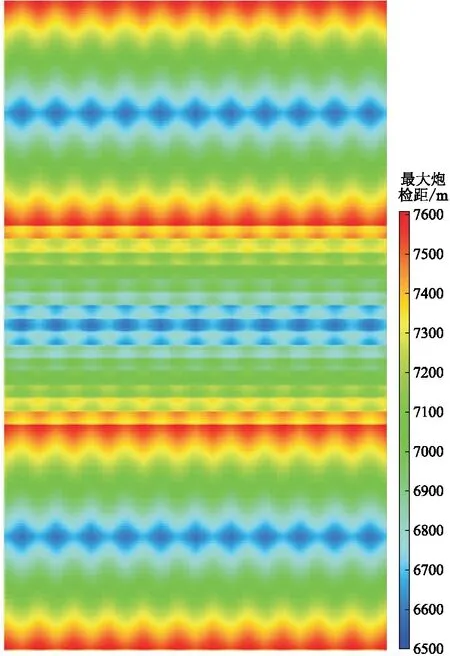
圖20 大十字觀測系統最大炮檢距分布
圖21為通過橫向限炮檢距得到的原觀測系統的最大炮檢距分布,該分布在縱、橫向分別以炮、檢線距(150m)為步長呈空間周期變化,最大炮檢距相差約為180m。可見大十字觀測系統橫向產生的冗余炮檢距信息,在空間上的分布是不均勻的,影響了數據整體的均勻性。
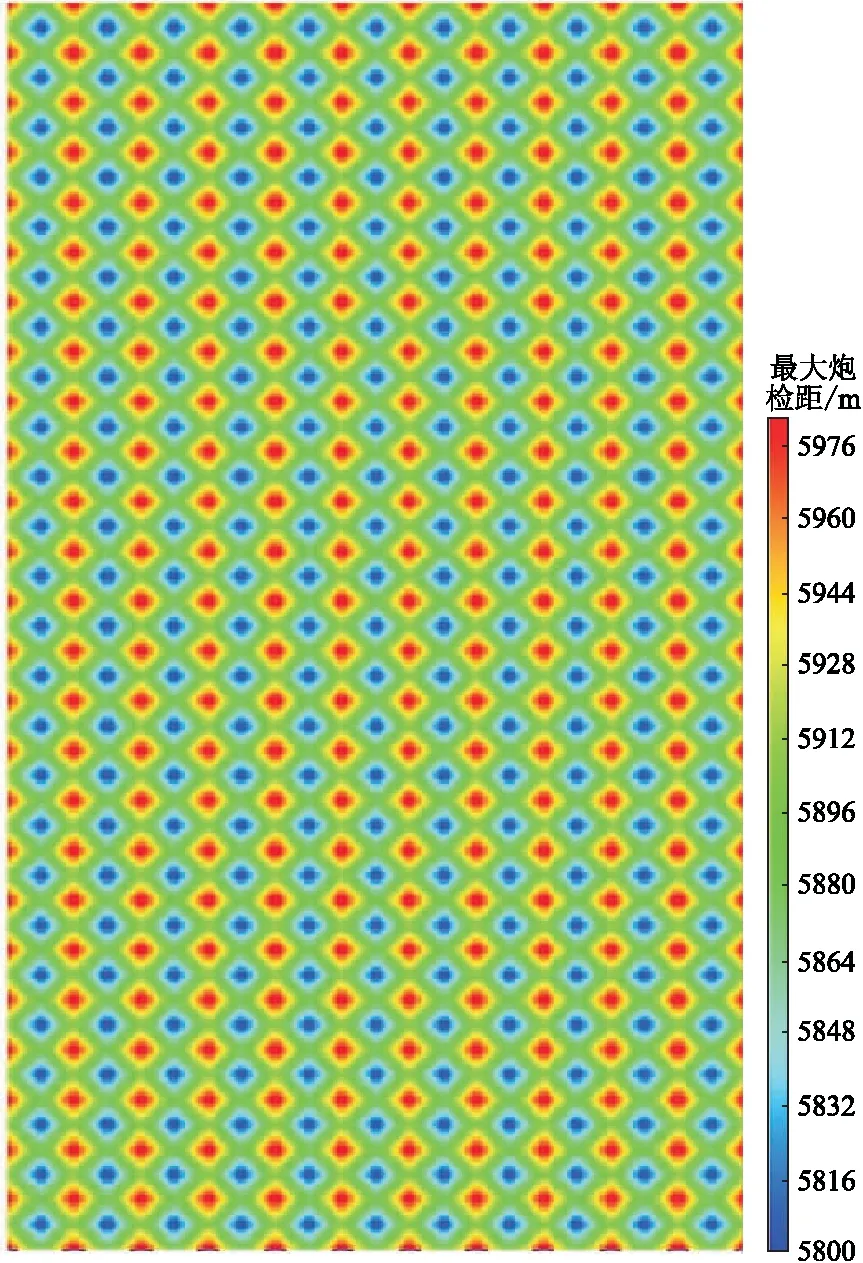
圖21 原觀測系統最大炮檢距分布
采集腳印是成果數據在空間上子波形態的差異,主要表現為振幅差異。從采集腳印的觀測系統成因分析,炮檢矢量空間差異是造成地震采集腳印的根本原因,采集腳印分布隨炮檢矢量空間變化而周期性地變化。根據東非M探區的主要勘探目的層埋深和巖性參數,分別對大十字觀測系統和原觀測系統進行地震采集模擬疊加分析。
圖22、圖23分別為大十字觀測系統與原觀測系統的數值模擬疊加結果。可見大十字觀測系統模擬疊加振幅空間變化大,最小值為32.90,最大值為33.51,振幅相對變化達1.82%;原觀測系統模擬疊加的振幅最小值為27.24,最大值為27.26,振幅相對變化僅0.07%。大十字觀測系統的所有橫向信息都參與處理應用,會產生地震采集腳印問題。大十字觀測系統采集腳印產生的主要原因,類似于早期束線三維觀測系統,因其設定的炮點線長,排列片橫向滾動距大,是導致產生“采集腳印”的重要因素之一[20]。
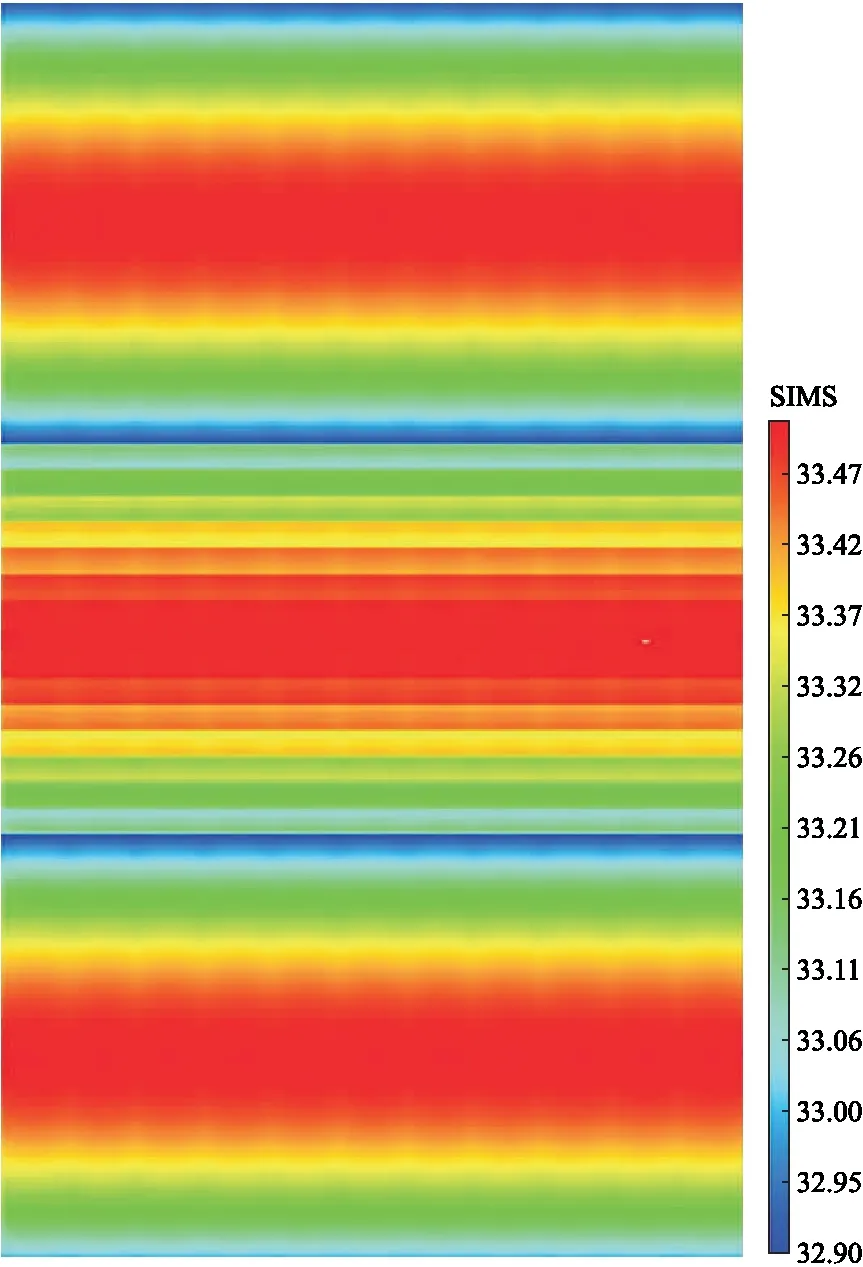
圖22 大十字觀測系統模擬疊加振幅分布
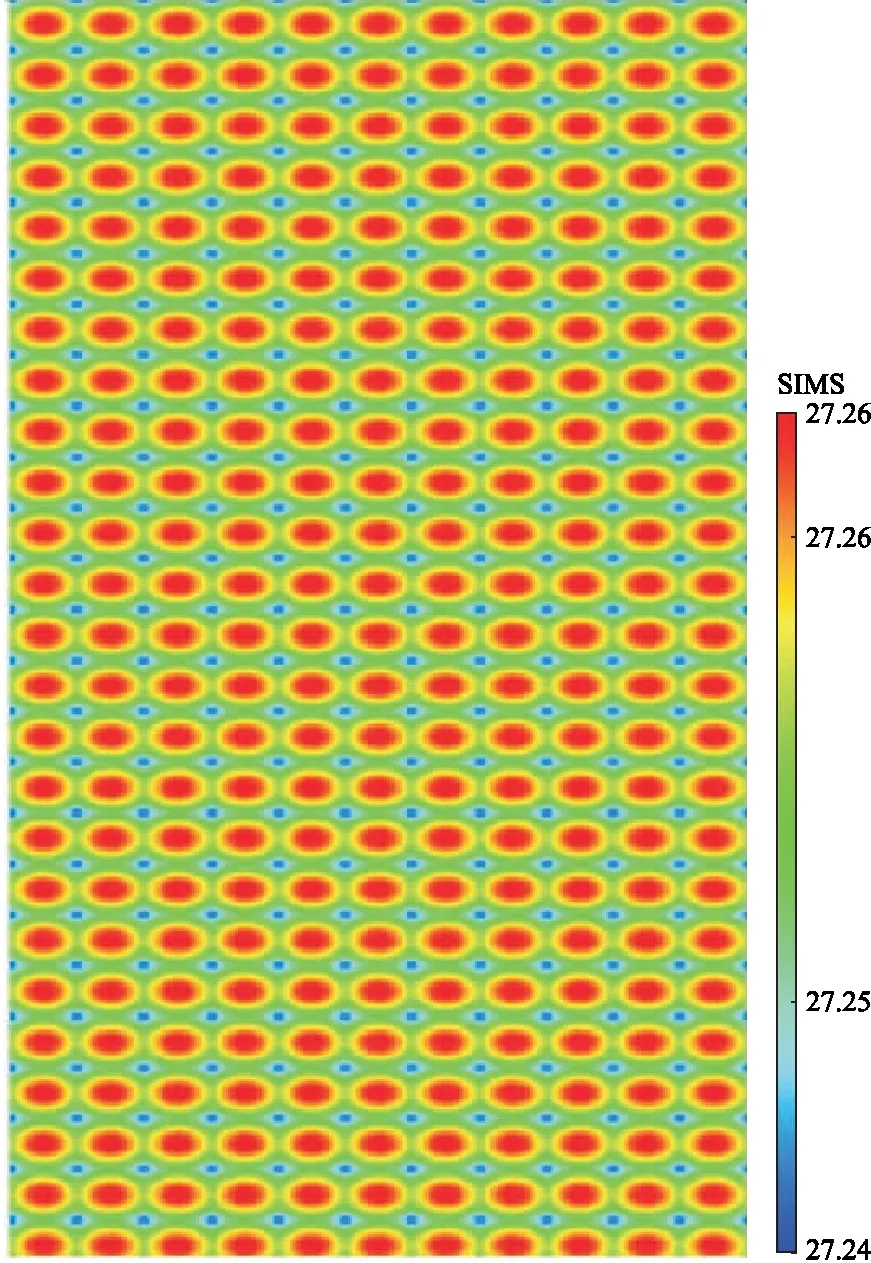
圖23 原觀測系統模擬疊加振幅分布
從對地下成像點采集信息貢獻角度分析,橫向大炮檢距信息拓寬了波數范圍和空間分布,能提高成像點子波空間分辨率,使橫向偏移歸位更準確。但橫向炮檢距大而不勻帶來了地震數據的采集腳印問題。對于大十字觀測系統的橫向大炮檢距信息的取舍,應根據大十字觀測系統縱、橫向最大炮檢距參數和地震數據用途綜合考慮,慎重使用。
在大十字觀測系統設計時,已考慮了包含原始觀測系統的十字子集信息,將橫向限炮檢距的最大炮檢距選擇為原觀測系統的橫向最大炮檢距,對大十字觀測數據進行橫向限炮檢距處理后,覆蓋次數均勻,且完全等同于原設計觀測系統數據體屬性。
4.2 印尼某海上平行觀測系統變換
觀測系統參數做以下設定。
接收排列:21線×295道=6195道
檢波線距:200m 道距:50m
激發排列:2束×4條(Inline)×949炮
=7592炮
炮線距:50m 炮點距:25m(Inline)
兩個炮線束的每束包含4條炮線;奇數炮線與偶數炮線之間錯位半個炮點距(圖24),檢波器類型為海底節點。
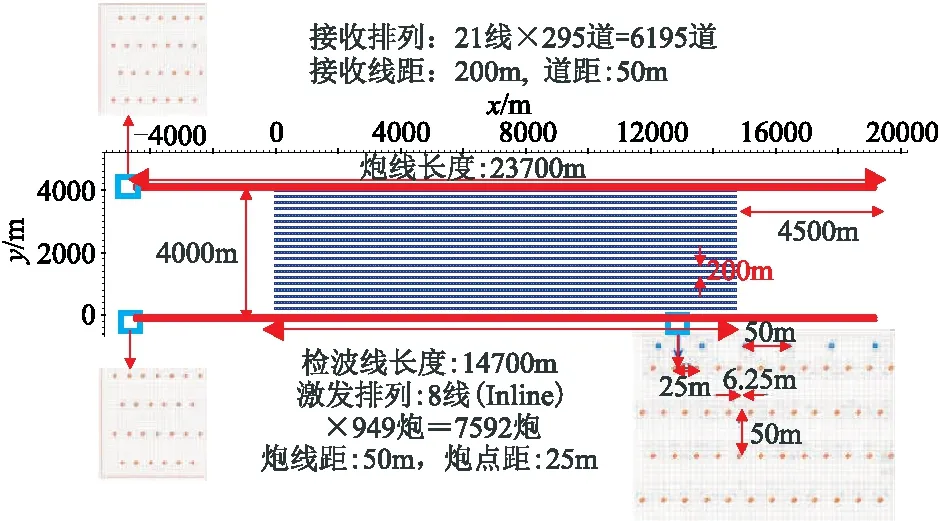
圖24 印尼某海上平行觀測系統
該平行觀測系統縱向上采用大十字觀測、橫向上采用推拉式觀測技術。滾動方式為:橫向上滾動一條檢波線(200m),縱向上滾動距為整個排列長度(14700m)。現場采集時,縱向上將工區劃分為若干個“tier”,每個“tier”長度即為14700m。即先橫向滾動采集,每束線的兩個炮線束采集完成,橫向滾動一條檢波線;每個“tier”橫向采集完成,縱向搬家,進行下一個“tier”的采集工作。
該平行觀測系統的奇數炮線與偶數炮線錯位半個炮點距,這通常是氣槍施工的需要,尤其是多源船施工,一方面給氣槍充氣留有時間,另一方面是減少相鄰炮間的氣泡影響。奇數線與偶數線錯動也實現了縱向面元細分,即縱向面元由12.50m細分為6.25m。兩個炮線束的炮點對稱接收排列錯位分布,即下側炮線束奇數炮線縱向錯位半個炮點距,上側炮線束偶數線縱向錯位半個炮點距,這樣的布炮方式使得橫向滾動后,上、下兩束炮線的炮點均不重復,中心反射點也不重復,奇、偶炮線錯開后橫向面元寬度由單邊50m再次細分為25m。最終實現空間數據采集密度為6.25m×25m。橫向滿覆蓋次數并不等于檢波線數(21次),而是將21次覆蓋橫向分開分布,因為奇數檢波線橫向覆蓋次數會以11次、10次交替分布。
上、下炮點橫向滾動不重復的結果,縱、橫向滾動后的“滿覆蓋”炮檢矢量為原觀測系統“蜘蛛圖”的上部或下部,且在相鄰面元上下、左右交替分布(圖25)。通常數據處理時,縱向面元選擇為12.5m,從而使每個面元的“蜘蛛”圖與原設計觀測系統相同,橫向滿覆蓋次數也變為21次。

圖25 實際觀測系統滿覆蓋“蜘蛛”圖(局部)
該平行觀測系統總接收道數為6195(原設計的總接收道數為7560)。從排列片總道數看,平行觀測系統的總道數比原觀測系統的總道數并未明顯減少。因為該項目為勘探公司重大勘探項目,配備地震采集節點設備數量相對較多。最終實施觀測系統的選擇是在充分利用所配備節點設備的基礎上,合理劃分采集區塊,最大程度地減少重復放炮,以達到采集效率最大化。
根據式(5)計算,該平行觀測系統縱向滿覆蓋次數并不均勻,縱向最大炮檢距達19200m。觀測系統設計更多地考慮了數據處理在縱向上做限炮檢距(4500m)處理,對采集數據進行篩選,剔除縱向冗余炮檢距信息,回歸原設計觀測系統數據屬性。
對該平行觀測系統縱向限炮檢距4500m后,排列未滾動,縱向滿覆蓋次數為90,滿覆蓋長度為10.3km。若采用常規三維觀測系統采集同樣面積的數據,則根據海底節點施工要求,至少需配備19950道海底節點。充分體現了大十字、推拉式等以炮代道觀測技術在海上節點地震采集中發揮的重要作用。
5 結論
以炮代道變觀技術結合現代三維地震高效采集技術,對寬方位、高密度地震勘探發揮著越來越重要的促進作用。以炮代道變觀設計能以有限的道數實現超高道數的高密度現場采集;對于海上地震勘探,也可通過以炮代道變觀設計最大程度地減輕海底節點、電纜施工工作量。通過分析、總結以炮代道變觀技術,取得以下幾點認識:
(1)以炮代道變觀是對現場數據采集方式的改變,變觀不應改變原地震采集工程技術設計確定的觀測系統的數據屬性;變觀要與原地震采集工程技術設計的觀測系統等價,十字子集相同是變換后觀測系統等價于原設計觀測系統的基本條件。
(2)推拉式、大十字、平行觀測系統、Patch觀測系統等都是常規三維觀測系統的一種等價變換形式;非等價變換的觀測系統評價實質是對觀測系統參數選擇的評價,不應武斷某種變觀形式的優劣。
(3)推拉式觀測系統和大十字觀測系統是正交觀測系統變換的最基本變觀形式,大多數復雜的變觀設計都可分解為推拉式和大十字兩種形式。推拉式觀測系統屬性與原觀測系統完全等價,大十字觀測系統剔除冗余炮檢距信息后,也與原觀測系統完全等價。
(4)推拉式和大十字變觀技術均可在接收排列的橫向或縱向上適用。推拉式觀測系統不產生冗余炮檢距信息,炮道數之積與原觀測系統的炮道積是一種恒定關系。大十字線(道)數選擇較靈活,線(道)數多,重復炮數越少,產生冗余炮檢距信息就越多;線(道)數少,重復炮數就越多,產生的冗余炮檢距信息反而少。大十字觀測系統炮道積常大于原觀測系統的炮道積。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
