高速飛行器低空級間分離時統(tǒng)方案研究
2022-08-02 11:01:44王錦鋒朱孟龍王健康
計算機測量與控制 2022年7期
關鍵詞:指令
鄒 凱,王錦鋒,朱孟龍,王健康
(1.中國運載火箭技術研究院,北京 100076; 2.中國航天空氣動力技術研究院,北京 100074)
0 引言
當前國內外已經開展了多次高速飛行器飛行試驗,在試驗中常用助推火箭將飛行器推送至預定的級間分離窗口,隨后打開火箭整流罩,釋放整流罩內部的飛行器,執(zhí)行級間分離。其中,整流罩拋罩與級間分離通常由火箭發(fā)起,為保證級間分離后飛行器在可控的時間窗口內起控,并維持姿態(tài)穩(wěn)定,飛行器需要接收火箭發(fā)送的時統(tǒng)指令,以確定起控時刻。
常規(guī)航天器的級間分離通常在大氣稀薄的臨近空間或大氣層外完成,如洲際飛行器、衛(wèi)星以及部分試驗類飛行器[1-3],分離點的橢球高度均在110 km以上,在分離后飛行器幾乎不受氣動力的干擾,動壓接近于0,且部分飛行器采用靜穩(wěn)定氣動布局,在無控狀態(tài)下能維持數秒至數十秒的姿態(tài)穩(wěn)定,對于級間分離時統(tǒng)指令的精度要求相對較低。
近年來,科學研究類高速飛行器趨向于在大氣稠密的低空進行級間分離,其典型的分離高度在45 km以下,動壓在30 kPa以上,且普遍為無整流罩氣動布局或采用在高度45 km以上提前將整流罩拋掉的方式,以避免低空拋罩對飛行器姿態(tài)的擾動[4-9]。此種級間分離方式對于時統(tǒng)精度提出了較高的要求,原因如下:
1)在低空高速飛行狀態(tài)下,干擾流場建立時間短,僅為毫秒級別,且動壓大,導致飛行器所承受的氣動力大[9];
2)隨著小型化、集成化技術的不斷發(fā)展,飛行器重量更輕、轉動慣量更小,導致姿態(tài)角變化的時間尺度更小[12];
3)為提高升阻比與飛行性能,飛行器通常采用靜不穩(wěn)定氣動布局,在無控狀態(tài)下姿態(tài)失穩(wěn)的時間更短[13]。
因此,此類飛行器與助推火箭級間分離對時統(tǒng)精度的要求較高[14],例如某高速飛行器在分離后可控的時間窗口僅有150 ms[15]。
而乘波體高速飛行器在低空、大動壓環(huán)境下同時執(zhí)行整流罩拋罩與級間分離,在技術研究和工程實現領域尚屬首次。在低空高速飛行條件下,動壓約為30 kPa,整流罩打開后氣動干擾流場會以毫秒級的時間尺度建立,對飛行器姿態(tài)產生很大的擾動,因此在與火箭分離后,飛行器可控的時間窗口僅有數十毫秒,對時統(tǒng)精度提出了更高的要求。
目前,航空航天飛行器普遍采用行程開關或分離連接器短路環(huán)等機械開關裝置傳遞級間分離時統(tǒng)指令[16-21]。此類裝置依靠機械運動產生的電觸發(fā)信號作為時統(tǒng)指令,當環(huán)境溫度、振動與供電電壓等條件變化時,裝置內部的彈簧推力、活動機構之間的滑動摩擦力與電磁分離力會發(fā)生變化,使活動機構的相對運動速度發(fā)生變化,導致傳遞時統(tǒng)指令的延遲時間尺度在數十毫秒至數百毫秒量級變化,難以提供毫秒級的時統(tǒng)精度。此外,在飛行器與火箭裝配對接后,無法測試此類機械開關裝置功能的完好性,對時統(tǒng)指令傳遞的可靠性產生影響。
本文針對乘波體高速飛行器與助推火箭在低空大動壓環(huán)境下同時執(zhí)行整流罩拋罩與級間分離后,飛行器可控的時間窗口短,對時統(tǒng)指令精度要求高的特點,開展高精度級間分離時統(tǒng)方案的研究,解決現有的時統(tǒng)裝置無法保證飛行器在可控的時間窗口內起控的問題。
1 系統(tǒng)結構及原理
1.1 設計依據
根據氣動流場仿真結果,飛行器與火箭的級間分離動作時刻如下。
1)0 ms:級間分離零時刻,火箭驅動處于閉合狀態(tài)的左半與右半整流罩打開;
2)145 ms:飛行器與火箭的結構固連裝置斷開,隨后分離彈簧推動飛行器與火箭快速拉開距離;
3)165 ms:由整流罩開罩及火箭前端面對接支架引起的干擾流場脫離飛行器的空氣舵面,飛行器在此時刻才具備起控條件;
4)210 ms:飛行器需要在此時刻前起控,否則姿態(tài)可能超出可控范圍。
因此,飛行器在與火箭級間分離后,維持姿態(tài)穩(wěn)定可控的時間窗口僅有45 ms。
通過氣動流場仿真得到的級間分離時序如圖1所示。
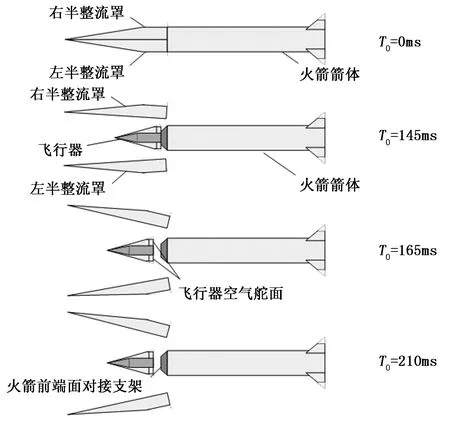
圖1 級間分離時序設計依據
1.2 時統(tǒng)裝置硬件構成及工作原理
由于異步RS-422通信受到溫度、振動與供電變化的影響極小,且在飛行器與火箭裝配對接后仍具有可測試性,具備傳遞高精度時統(tǒng)指令的條件[22],但通信過程中存在誤碼與丟幀的問題,會影響時統(tǒng)精度,需要解決。
本文設計了具有糾錯功能的RS-422通信時統(tǒng)指令(以下簡稱“422時統(tǒng)指令”)與分離連接器短路環(huán)時統(tǒng)指令(以下簡稱“短路環(huán)時統(tǒng)指令”)冗余的級間分離時統(tǒng)方案,其硬件裝置包含:
(1)位于火箭一側的分離連接器插頭(內部設有電磁解鎖裝置和解鎖拉桿)、火箭飛控計算機、解鎖電纜、拉繩與起爆電纜;
(2)位于飛行器一側的分離連接器插座(內部設有彈簧,用于在插頭與插座解鎖后將插頭彈出)與飛行器飛控計算機;
(3)連接飛行器與火箭的分離螺栓、RS-422通信電纜、短路環(huán)1、短路環(huán)2與分離彈簧。
硬件裝置組成如圖2所示。
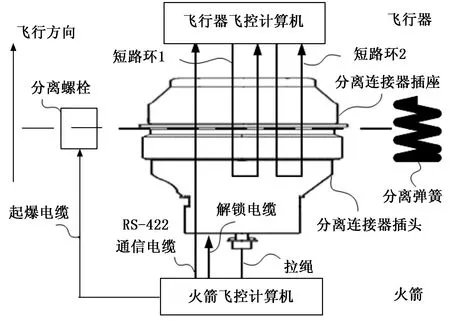
圖2 級間分離時統(tǒng)裝置組成
在級間分離前,火箭與飛行器通過分離螺栓剛性連接,火箭飛控計算機通過起爆電纜與分離螺栓連接,分離彈簧處于壓縮狀態(tài),分離連接器插座固定在飛行器上,插頭與插座插合,火箭飛控計算機與飛行器飛控計算機使用穿過分離連接器的RS-422通信電纜通信。火箭飛控計算機通過解鎖電纜驅動分離連接器插頭中的電磁解鎖裝置。拉繩的一端固定在火箭箭體上,另一端固定在分離連接器插頭的解鎖拉桿上,處于繃緊的狀態(tài)。短路環(huán)1與短路環(huán)2從飛行器飛控計算機的供電接口引出,穿過分離連接器插座后進入分離連接器插頭并折返,再次穿過分離連接器插座后進入飛行器飛控計算機的采集接口。
在級間分離時刻,火箭飛控計算機首先驅動整流罩開罩,同時通過RS-422通信電纜向飛行器飛控計算機發(fā)送“422時統(tǒng)指令”,隨后通過解鎖電纜驅動分離連接器插頭中的電磁解鎖裝置產生磁力拉動拉桿向插頭外側移動,使分離連接器的插頭與插座解鎖,插頭被插座中處于壓縮狀態(tài)的彈簧彈出,插頭與插座分離。此時短路環(huán)1與短路環(huán)2斷開,并由飛行器飛控計算機采集,作為“短路環(huán)時統(tǒng)指令”。根據工程經驗,在面對稱飛行器與火箭分離時,需要盡量減少分離端面的連接機構,避免對飛行器的姿態(tài)產生影響,因此待分離連接器插頭與插座的外殼分離后,火箭飛控計算機通過起爆電纜引爆分離螺栓,在分離螺栓斷開后,通過分離彈簧的推動,飛行器與火箭分離快速拉開距離,以便使飛行器的空氣舵面盡快脫離由火箭前端面對接支架產生的干擾流場區(qū)域。若分離連接器插頭中的電磁解鎖裝置失效,在分離螺栓斷開后,火箭與飛行器沿飛行方向的相對位移迫使拉繩將拉桿拉出,此時分離連接器插頭與插座解鎖分離。
2 系統(tǒng)硬件設計
2.1 422時統(tǒng)指令設計
由RS-422通信傳輸的原理可知,火箭向飛行器傳輸422時統(tǒng)指令時存在一定的延遲時間,由三部分組成:
1)從火箭飛控計算機確定級間分離0時刻,至開始發(fā)送422時統(tǒng)指令數據幀,此延遲時間最短趨近于0,最長為火箭飛控計算機軟件的運行周期,在本文中軟件的運行周期為10 ms,因此延遲時間范圍為0~10 ms;
2)從火箭飛控計算機開始發(fā)送422時統(tǒng)指令數據幀,至此數據幀全部存入飛行器飛控計算機串口數據接收緩沖區(qū)中,此延遲時間為固定值,與422時統(tǒng)指令數據幀的字節(jié)數和RS-422通信數據傳輸碼速率有關,本文中422時統(tǒng)指令數據幀共包含64個字節(jié),即704個比特位,傳輸碼速率為115 200 bps,因此延遲時間約為7 ms;
3)從飛行器飛控計算機開始讀取串口數據接收緩沖區(qū)中的數據幀,至開始執(zhí)行飛行控制律的軟件定時延遲,此延遲時間最短趨近于0,最長為飛行器飛控計算機軟件的運行周期,本文中軟件的運行周期為5 ms,因此延遲時間范圍為0~5 ms。
以上3個延遲時間之和為422時統(tǒng)指令傳輸的延遲時間,最短為7 ms,最長為22 ms。因此,422時統(tǒng)指令傳輸延遲時間的變化范圍為15 ms,即時統(tǒng)精度為15 ms,滿足飛行器在可控的時間窗口45 ms內起控的精度要求。在飛控計算機硬件性能存在余量的條件下,通過降低飛控軟件的運行周期,可以降低指令傳輸延遲時間的變化范圍,從而獲得更高的時統(tǒng)精度。
為解決由于誤碼或丟幀導致飛行器獲取時統(tǒng)指令推遲,造成時統(tǒng)精度降低的問題,在時統(tǒng)指令數據幀中分別設置“分離狀態(tài)”與“起控延時標志”兩個字節(jié),在飛行器飛控計算機軟件中,設置與“起控延時標志”對應的“起控倒計時時間”,指令內容與對應關系參見表1。

表1 422時統(tǒng)指令內容與對應關系
表1中各參數說明如下:
1)“分離狀態(tài)”由火箭向飛行器發(fā)送,在級間分離開始前為“0x00”,開始后變?yōu)椤?xFF”;
2)“起控延時標志”由火箭向飛行器發(fā)送,在級間分離開始前為0,開始后隨每幀422時統(tǒng)指令數據幀增加1,由1開始,逐漸累加至255,用正整數n表示;
3)“起控倒計時時間”中,C422為飛行器飛控計算機從接收到“分離序號”為1的422時統(tǒng)指令至起控的軟件倒計時時間,通過地面試驗的結果設計與計算獲得;T422為火箭飛控計算機發(fā)送422時統(tǒng)指令數據幀的周期。
在級間分離過程中,若前幾個422時統(tǒng)指令數據幀出現誤碼或丟幀,飛行器飛控計算機可通過后續(xù)正確的數據幀獲得“分離狀態(tài)”與“起控延時標志”,通過計算得到正確的“起控倒計時時間”,從而消除由于RS-422通信誤碼或丟幀造成的時統(tǒng)誤差增大,保證飛行器在可控的時間窗口內起控。
2.2 短路環(huán)時統(tǒng)指令延遲時間測量
本文選用航天電器研制的YF43-54型分離連接器,外觀如圖3所示,外殼為不銹鋼材質,表面為導電狀態(tài)。

圖3 分離連接器插頭(左)與插座(右)
在分離連接器插頭與插座分離的過程中,短路環(huán)與RS-422通信通路先斷開,插頭與插座的外殼后分離。由于該過程存在機械運動,從火箭飛控計算機驅動電磁解鎖裝置至短路環(huán)斷開的延遲時間變化范圍相對于毫秒級時統(tǒng)精度要求較大,需要測量。
本文設計了一套分離連接器短路環(huán)及外殼斷開延遲時間測量裝置,包含有機玻璃支架、水平振動臺、多路輸出電源與4通道示波器。分離連接器插座通過螺釘固定在支架上,支架通過螺釘固定在水平振動臺上,分離連接器插頭插接在插座上,支架可以保證分離連接器的外殼與振動臺的臺面之間絕緣。
電源分別對分離連接器的電磁解鎖裝置、短路環(huán)1、短路環(huán)2與插座外殼供電,在電源與電磁解鎖裝置之間串聯(lián)1只開關,用于控制電磁解鎖裝置的供電狀態(tài)。通過電阻對電源進行分壓后,使用示波器分別采集電磁解鎖裝置的通電時間與短路環(huán)1、短路環(huán)2、插頭外殼的斷電時間,等效得到從火箭飛控計算機驅動電磁解鎖裝置至兩路短路環(huán)斷開、插頭與插座外殼分離的延遲時間。
測量裝置的電氣連接關系如圖4所示。
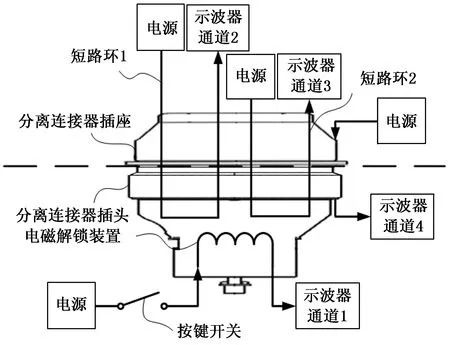
圖4 短路環(huán)斷開延時測量裝置電氣連接關系
影響短路環(huán)斷開、插頭與插座外殼分離延遲時間的條件包括以下三項。
1)振動方向:沿分離連接器不同方向的振動將導致插頭與插座之間的滑動摩擦力大小發(fā)生變化,由于插座中彈簧的推力固定,使插頭與插座的相對運動速度不同,造成延遲時間不同。在測量時通過調節(jié)支架在振動臺的安裝方向,分別沿分離連接器的軸向與側向施加振動,以覆蓋實際飛行過程中級間分離時刻的振動方向;
2)振動量級:振動量級的不同將導致插頭與插座之間的滑動摩擦力大小發(fā)生變化,由于插座中彈簧的推力固定,使插頭與插座的相對運動速度不同,造成延遲時間不同。在測量時通過調節(jié)振動臺的振動量級,分別設置無振動、振動總均方根加速度為grms=8.14 g和grms=11.52 g三種狀態(tài),以覆蓋實際飛行過程中級間分離時刻的振動量級;
3)電磁解鎖裝置供電電壓:電磁解鎖裝置供電電壓的不同將導致解鎖拉桿受到的磁拉力發(fā)生變化,使解鎖拉桿的運動速度不同,造成插頭與插座分離的延遲時間不同,在測量時通過調節(jié)電源的輸出電壓,分別設置為25 V、26 V、28 V與31 V,以覆蓋實際飛行過程中的供電電壓。
將以上條件組合得到24種測量狀態(tài),每個狀態(tài)重復測量3次,共獲得72組數據,統(tǒng)計后得到如下結論:
1)在同一次分離測試中,兩路短路環(huán)斷開的時間差小于6 ms;
2)從按鍵開關驅動電磁解鎖裝置至兩路短路環(huán)全部斷開的延遲時間,最短為20 ms,最長為85 ms(最長時間出現的條件為25 V解鎖電壓下側向最高振動量級),按照3 σ統(tǒng)計,參照20~61 ms設計;
3)從按鍵開關驅動電磁解鎖裝置至插頭與插座外殼分離的延遲時間,最短為34 ms,最長為110 ms(最長時間出現的條件為25 V解鎖電壓下側向最高振動量級),按照3 σ統(tǒng)計,參照不長于91 ms設計。
綜上,短路環(huán)時統(tǒng)指令在供電電壓較低與側向高振動量級的環(huán)境條件下,傳輸的延遲時間將大幅延長,作為時統(tǒng)指令時不滿足時間精度要求。因此,將422時統(tǒng)指令作為主份時統(tǒng)指令,將短路環(huán)時統(tǒng)指令作為備份時統(tǒng)指令。
3 級間分離時序設計
根據級間分離設計的輸入條件,設計級間分離步驟如下:
1)在級間分離0時刻,火箭飛控計算機驅動整流罩開罩,同時持續(xù)向飛行器飛控計算機發(fā)送422時統(tǒng)指令;
2)火箭飛控計算機通過解鎖電纜驅動分離連接器插頭的電磁解鎖裝置;
3)飛行器飛控計算機持續(xù)接收并判斷422時統(tǒng)指令,當首次接收到“分離狀態(tài)”有效的時統(tǒng)指令時,進入步驟4,當未接收到正確的時統(tǒng)指令或“分離狀態(tài)”無效時,進入步驟5;
4)飛行器飛控計算機根據首次接收到422時統(tǒng)指令中的“起控延時標志”確定“起控倒計時時間”,開始422時統(tǒng)指令起控倒計時,之后進入步驟8;
5)飛行器飛控計算機采集短路環(huán)1與短路環(huán)2的狀態(tài),若全部斷開,則進入步驟6,否則返回步驟3;
6)飛行器飛控計算機判斷兩路短路環(huán)斷開的持續(xù)時間是否滿足閾值,若滿足,則進入步驟7,否則返回步驟3;
7)飛行器飛控計算機開始短路環(huán)時統(tǒng)指令起控倒計時;
8)火箭飛控計算機通過起爆電纜引爆分離螺栓;
9)分離螺栓斷開,火箭與飛行器分離;
10)飛行器飛控計算機在起控倒計時結束時刻起控。
級間分離流程如圖5所示。
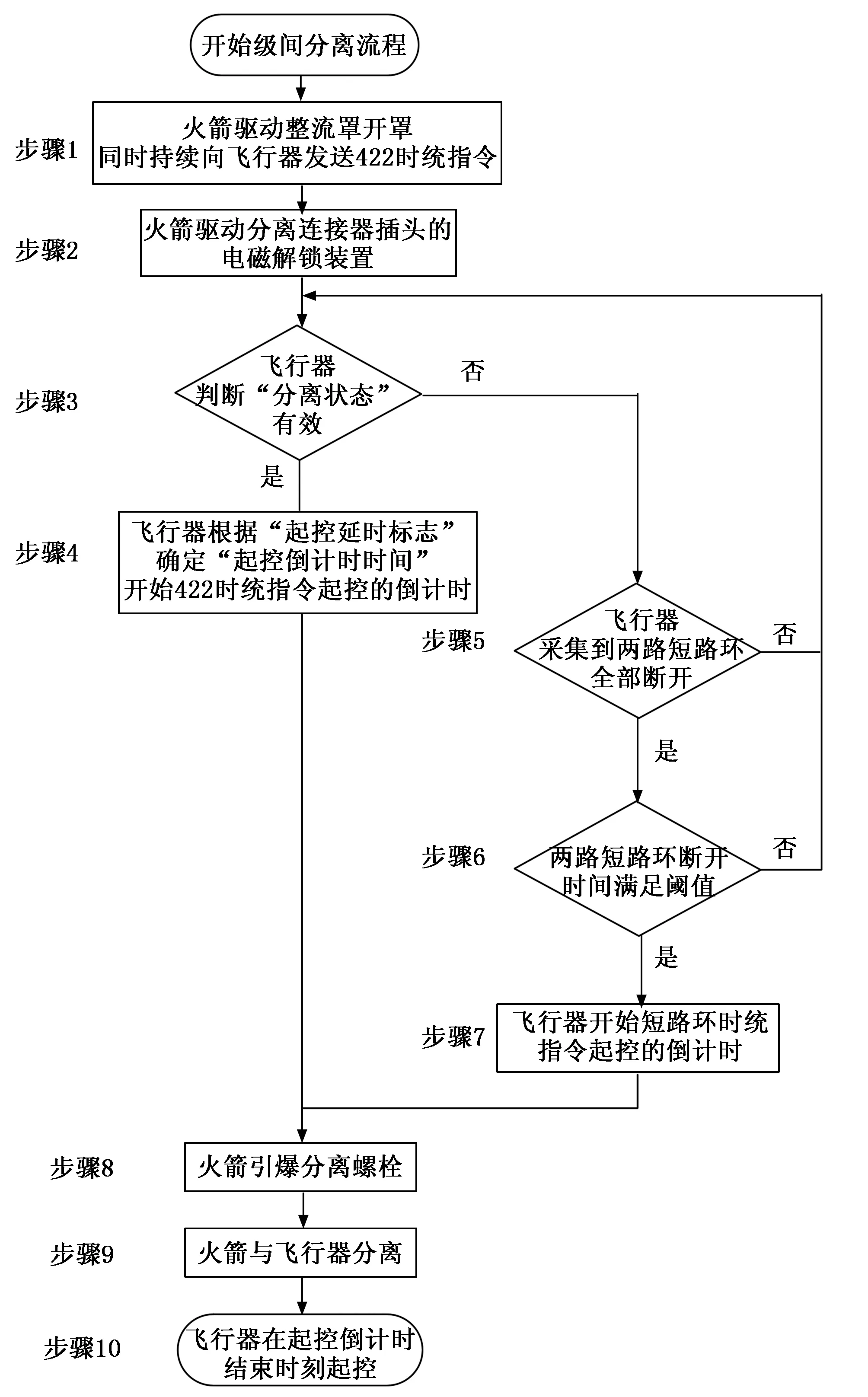
圖5 級間分離流程
根據級間分離時序設計依據與時統(tǒng)指令傳輸延遲時間測量結果,調整火箭與飛行器飛控計算機軟件中各步驟的執(zhí)行時刻,設計級間分離時序如圖6所示。

圖6 級間分離時序
圖6中各符號的定義與時間關系說明如下:
1)D422:火箭發(fā)送的422時統(tǒng)指令數據幀通信傳輸的延遲時間,參照2.1小節(jié),范圍為7~22 ms;
2)DDIO:從火箭飛控計算機驅動電磁解鎖裝置至短路環(huán)斷開的延遲時間,參照2.2小節(jié),范圍為20~61 ms;
3)DSB:從火箭飛控計算機驅動電磁解鎖裝置至分離連接器插頭與插座外殼分離的延遲時間,參照2.2小節(jié),不長于91 ms;
4)DBB:從火箭飛控計算機引爆分離螺栓至分離螺栓斷開的延遲時間,參照分離螺栓廠家的數據,范圍為2.92 ~ 5.58 ms;
5)C422:參照表1,在飛行器飛控計算機軟件中設定為160 ms;
6)CDIO:使用短路環(huán)時統(tǒng)指令時,從飛行器飛控計算機確定兩路短路環(huán)可靠斷開,至起控的倒計時時間,在飛行器飛控計算機軟件中設定為76 ms;
7)T422:參照表1,在火箭飛控計算機軟件中設定為10 ms;
8)n:參照表1,起控延時標志;
9)WDIO:飛行器飛控計算機判斷短路環(huán)可靠斷開的時間閾值,設定為檢測到斷開狀態(tài)持續(xù)50 ms,認為短路環(huán)可靠斷開;
10)T0:級間分離0時刻,火箭飛控計算機驅動整流罩開罩,并向飛行器飛控計算機連續(xù)發(fā)送422時統(tǒng)指令;
11)S0:飛行器飛控計算機接收到第一個正確422時統(tǒng)指令的時刻,并開始起控倒計時,由于422通信可能存在誤碼或丟幀的情況,即未正確收到前n-1個422時統(tǒng)指令數據幀,則S0=D422+(n-1)×T422;
12)T1:火箭飛控計算機通過解鎖電纜驅動分離連接器插頭中電磁解鎖裝置的時刻,在火箭飛控計算機軟件中設定為級間分離20 ms時刻;
13)S1A:飛行器飛控計算機采集到短路環(huán)1與短路環(huán)2全部斷開的時刻,S1A=T1+DDIO,范圍為40~81 ms;
14)S1B:短路環(huán)斷開時間滿足閾值,短路環(huán)時統(tǒng)指令有效的時刻,S1B=S1A+WDIO,范圍為90~131 ms;
15)S1C:分離連接器插頭與插座外殼分離的時刻,S1C=T1+DSB,范圍為≯111 ms;
16)T2:火箭飛控計算機通過起爆電纜引爆分離螺栓的時刻,在火箭飛控計算機軟件中設定為級間分離140 ms時刻;
17)S2:分離螺栓斷開時刻,S2=T2+DBB,范圍為142.92~ 145.58 ms;
18)S3:飛行器起控時刻,若使用422時統(tǒng)指令,S3=D422+C422,范圍為167~ 182 ms;若使用短路環(huán)時統(tǒng)指令,S3=S1B+CDIO,范圍為166~207 ms。
計算結果表明,設計的級間分離時序滿足飛行器在可控時間窗口內起控的要求。
4 實驗結果與分析
4.1 地面試驗
為驗證422時統(tǒng)指令與短路環(huán)時統(tǒng)指令精度是否滿足設計要求,在地面試驗中使用示波器對火箭T0時刻與飛行器S0時刻輔助進行時統(tǒng)測量。
在測試422時統(tǒng)指令時,將火箭飛控計算機的1路開關量輸出通道設置為在T0時刻由低電平變?yōu)楦唠娖剑涍^分壓電阻后連接示波器的通道1;將飛行器飛控計算機的1路開關量輸出通道設置為在S0時刻由低電平變?yōu)楦唠娖剑涍^分壓電阻后連接示波器的通道2;
在試驗中,可以通過火箭飛控計算機輸出數據獲取的時刻包括T0、T1與T2,可以通過飛行器飛控計算機輸出數據獲取的時刻包括S0、S1A、S1B與S3;分離螺栓斷開時刻S2可以通過飛行器的近場沖擊傳感器測量沖擊峰值時刻獲得。分離連接器插頭與插座外殼分離時刻S1C使用示波器輔助測量:將插座的外殼與飛行器艙壁進行絕緣處理后,連接隔離電源的正極,插頭的外殼經過電阻分壓后連接示波器的通道3,電源的負極與示波器的測量地連接,在外殼分離時刻示波器可以檢測到插頭的供電斷開,即S1C時刻。地面試驗結果如表2所示。

表2 地面試驗422時統(tǒng)指令時序 ms
由表2可知,飛行器的起控時刻為級間分離173 ms時刻,滿足在167 ms時刻至182 ms時刻之間的設計要求。
在測試短路環(huán)時統(tǒng)指令時,需要斷開422時統(tǒng)指令通路。相較422時統(tǒng)指令地面試驗,將飛行器飛控計算機連接示波器通道2的開關量輸出通道調整為在S1A時刻由低電平變?yōu)楦唠娖剑渌麥y量通道不變。本輪試驗出于成本考慮,未安裝分離螺栓。地面試驗結果如表3所示。
由表3可知,在無飛行振動環(huán)境條件下,飛行器的起控時刻為級間分離171 ms時刻,滿足在166 ms時刻至207 ms時刻之間的設計要求,而振動環(huán)境條件在整機地面試驗中的實施難度較大,因此不進行短路環(huán)時統(tǒng)指令精度測量。
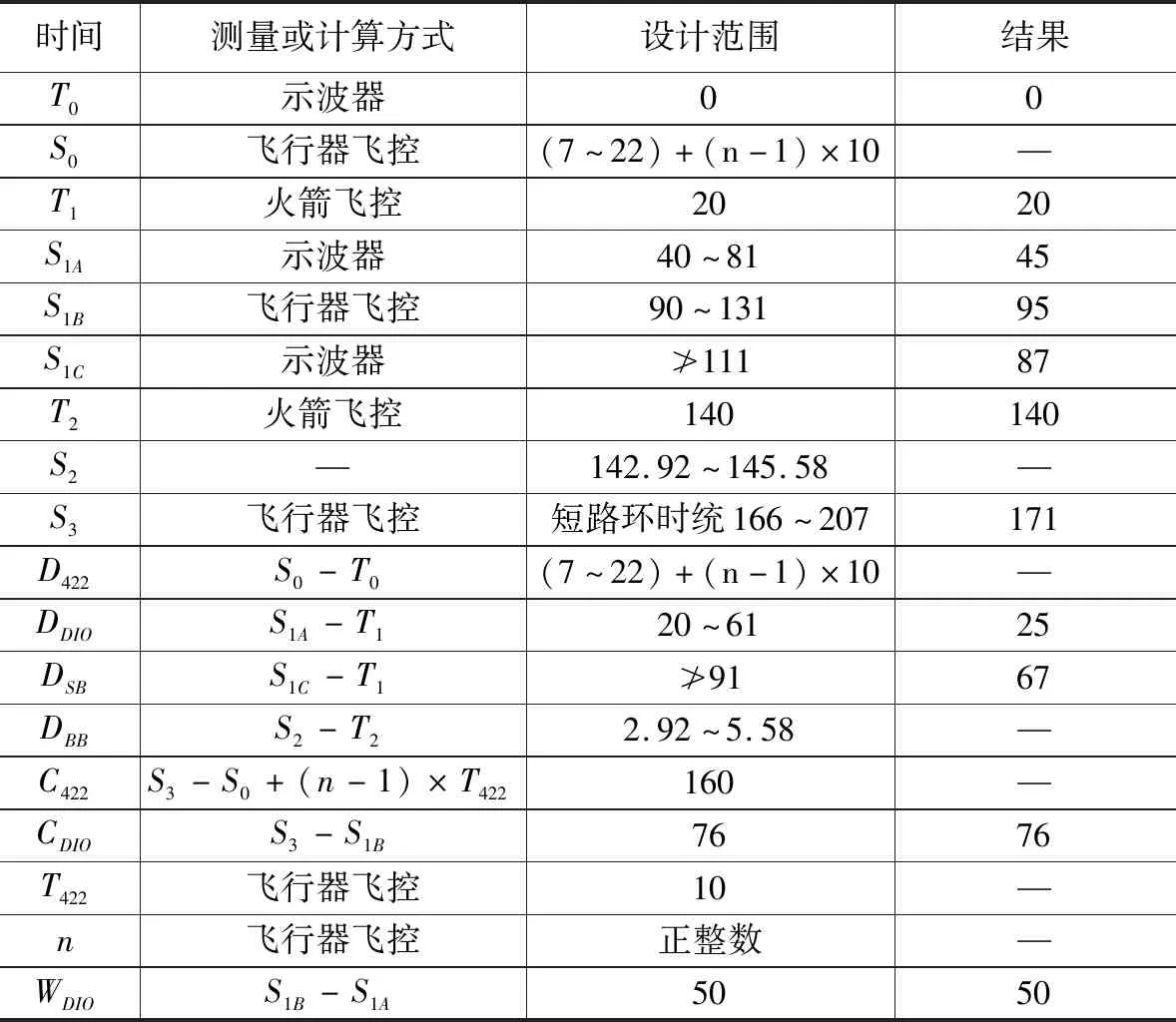
表3 地面試驗短路環(huán)時統(tǒng)指令時序 ms
隨后,模擬火箭飛控計算機發(fā)出錯誤的時統(tǒng)指令,測試飛行器飛控計算機對指令的響應情況如下:
1)當422時統(tǒng)指令中的“分離狀態(tài)”與“起控延時標志”存在1~2項錯誤時,飛行器飛控計算機不響應指令;
2)當兩路短路環(huán)未全部斷開或連續(xù)斷開時間不足50 ms的閾值時,飛行器飛控計算機不響應指令;
3)飛行器飛控計算機以先接收到的正確時統(tǒng)指令作為起控倒計時的時統(tǒng)指令。
經過驗證,飛行器飛控計算機對各種錯誤時統(tǒng)指令的響應結果滿足設計要求,能夠實現有效的識別與糾錯。
4.2 飛行試驗
在飛行試驗中,由于無法使用示波器測量火箭與飛行器的相對時間關系,以火箭沖擊傳感器與飛行器沖擊傳感器同時采集到火箭發(fā)動機點火沖擊的峰值時刻作為時統(tǒng)標志,推算出T0與S0之間的時間關系。本輪試驗無法測量分離連接器插頭與插座外殼分離的時刻。飛行試驗的級間分離時序測量結果如表4所示。

表4 飛行試驗級間分離時序 ms
由表4可知,飛行器的起控時刻為級間分離175 ms時刻,滿足設計要求。
對級間分離階段飛行器的姿態(tài)角與1號舵機數據進行分析,評估飛行器的姿態(tài)穩(wěn)定性與起控時間。
將T0作為0時刻,在0~300 ms之間飛行器的俯仰角、滾轉角、1號舵機指令角度與反饋角度變化如圖7所示。氣動干擾流場在火箭飛控計算機驅動整流罩開罩后的10 ms內作用在飛行器機體上,此時刻雖然1號舵機指令角度為0°,但舵面在流場的作用下開始抖動,使1號舵機反饋角度在-0.16°~0.16°之間變化;隨后,飛行器與無整流罩火箭組合體的滾轉角由0°減小至-1.42°;在與火箭分離后,飛行器的滾轉角降至最小值-1.52°,隨后逐漸增大至0.91°;俯仰角全程由3.49°逐漸增大至5.28°。

圖7 級間分離0~300 ms姿態(tài)角與舵機角度
飛行器飛控計算機的起控標志在175 ms(S3)時刻變?yōu)槠鹂貭顟B(tài),飛行控制律介入,由于采用比例-微分控制方式,加入了對滾轉角與滾轉角速度變化趨勢的判斷,而在175~235 ms之間,飛控控制律認為飛行器姿態(tài)穩(wěn)定,因此1號舵機指令為0°;在235 ms時刻,飛控計算機認為飛行器滾轉角即將超過0°,立刻發(fā)出1號舵機指令。
以T0作為0時刻,在0~7 s之間,飛行器的俯仰角、滾轉角、1號舵機指令角度與反饋角度變化如圖8所示。飛行器與火箭分離后,俯仰角在0.145~0.40 s之間由3.73°增大到6.11°,并在1.30 s時刻穩(wěn)定至3.67°。滾轉角在1.60 s時刻減小至-1.52°,隨后在0.81 s時刻增大到9.80°,并在5.69 s時刻恢復至穩(wěn)定值0.19°。
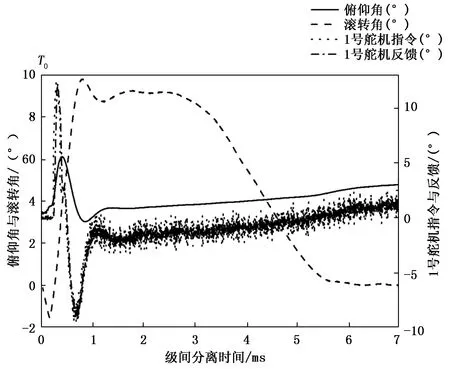
圖8 級間分離0~7 s姿態(tài)角與舵機角度
通過飛行試驗,驗證了級間分離時統(tǒng)方案保證了飛行器在可控的時間窗口內起控,并在級間分離后使飛行器維持姿態(tài)穩(wěn)定。
5 結束語
針對本文設計的級間分離時統(tǒng)方案,結論如下:
1)通過地面試驗與飛行試驗,驗證了422時統(tǒng)指令可以對通信傳輸過程中的丟幀與誤碼進行糾錯,并保證飛行器在可控的時間窗口內起控;
2)在高振動量級的飛行環(huán)境下使用短路環(huán)時統(tǒng)指令時,起控時間存在一定概率超出可控的時間窗口,因此,當422時統(tǒng)指令失效,依靠短路環(huán)時統(tǒng)指令進行時統(tǒng)時,增加了飛行器姿態(tài)失控的風險,在后續(xù)的方案設計中需要改進;
3)本文設計的時統(tǒng)方案經過飛行試驗考核,時統(tǒng)精度滿足設計要求,RS-422通信接口在飛控計算機中的應用非常廣泛,因此無需對飛控計算機的硬件進行修改,即可提高級間分離的時統(tǒng)精度,滿足乘波體高速飛行器低空級間分離的時統(tǒng)精度要求。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27