輸電線路放線滑車施工過程監測系統設計與實現
2022-08-02 11:00:52郝玉靖孫國磊
計算機測量與控制 2022年7期
關鍵詞:施工
江 明,郝玉靖,孫國磊,秦 劍,楊 吉
(1.中國電力科學研究院有限公司,北京 100055; 2.國網山東省電力公司建設公司,濟南 250118;3.北京智芯微電子科技有限公司,北京 102299)
0 引言
目前在輸電線路工程中,導線的放線作業主要采用張力放線方式,具有放線質量好、機械化程度高、放線速度快、效率高等優點。放線滑車在放線施工中承托牽引繩、導線,是施工的關鍵部件。在張力放線過程中,需安排人員觀察導線通過放線滑車的狀態,并通過對講機將信息傳達給指揮人員,以便設備操作人員對牽張力進行調整。而靠觀察不能獲得放線滑車的載荷、偏轉角度、轉動狀態等力學及運動變化數據,而且放線滑車數量多,觀察人員無法全過程、及時的匯報數據,指揮人員也難以及時對異常情況做出反應[1-3]。
預警系統能夠有效避免事故風險,確保人員及裝備的安全,因此國外學者就該方向展開了系統的研究。Jeha Ryu等在柔性多體動態系統的數值仿真研究中,通過動態應力的監測,實現了對柔性多體系統的監測和預警[4]。Nayfeh通過將繩索剛接并在端部加上可擺動球形物體來代替貨物,模擬三維模型的運動過程,進而對集中載荷的空間位置進行了監測預警[5]。Zi等建立了不忽略繩索質量的繩索懸掛式并聯機械的動力學公式,可實時對柔性繩索進行監測預警[6]。Andrew等提出一種準確并且有效地建模方法,建立了一種非平面的輸入輸出模型,可以將剛性的、柔性的或可變的繩索與整個體系的其他部件進行連接,對繩索斷裂破壞行為進行預警[7]。鞠彥忠等通過ADAMS數值仿真平臺對導線展放進行數值仿真研究,對張力架線仿真系統進行實例分析,以便掌握架線全過程的動力特性和空間位置[8]。郭昊坤等開發了輸電線路導線舞動在線監測系統,對導線的運行數據進行監測[9]。聶冰等設計了采用加速度傳感器和無線通信技術的舞動監控數據采集系統,實現對線路舞動的判斷和報警[10]。黃新波等研發出基于通用移動通信系統/短信息服務(GSM/SMS)的輸電線路覆冰在線監測系統,能實時進行數據傳輸,有效預防災害事故[11]。范偉平等設計了基于ARM+Linux和單片機的嵌入式導線舞動在線監測系統,對導線的運行實時監測[12]。李俊等建立信息系統的實時狀態監測模型,并結合系統的故障模式、影響及危害性分析,對系統故障的影響給出初步的分析[13]。周鑫等提出了以智能技術防范為主要手段的視頻監控平臺建設方案[14],張繼平等提出自適應的背景相減法實時地定位和跟蹤直道、彎道上運動的車輛[15]。這些實時狀態監測方法及系統提升了工程安全性。
為了防止放線滑車出現與牽引板卡阻、大幅振蕩等安全事故,提高放線施工作業安全,在此通過傳感器等設備采集放線過程中放線滑車狀態信息,并通過通訊網絡系統反饋至監測系統,與施工過程狀態分析數據進行對比,實現放線預警。
1 放線滑車監測需求
首先針對放線過程中放線滑車的狀態變化,研究放線滑車的監測內容。
目前特高壓線路工程中常用三輪放線滑車如圖1所示,由3個滑輪、連板、框架、心軸、底梁組成。3個滑輪通過心軸進行連接,框架和底梁將3個滑輪連接在一起,通過連扳懸掛在輸電鐵塔上。
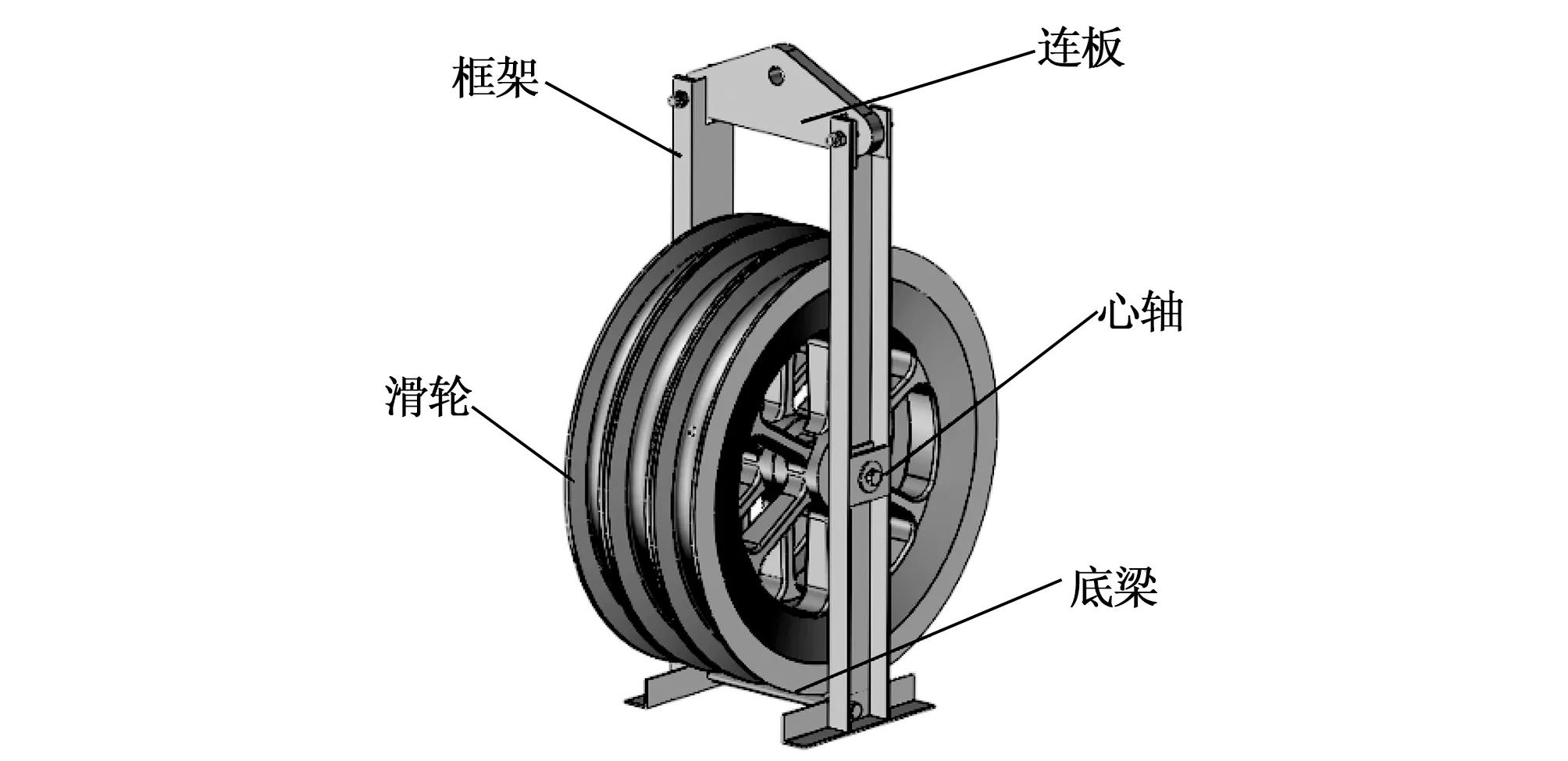
圖1 三輪放線滑車
(1)張力放線施工中,放線滑車在導線通過時承受較大載荷,當載荷過大時可造成滑輪輪片破損,進而引起放線事故,因此需密切關注放線滑車受到的導線壓力。在轉角塔處,由于線路轉角導致了放線滑車發生相對垂直方向的偏轉,當偏轉角度較大時將影響牽引板通過,如圖2所示[16]。如果牽引板卡在放線滑車上,則可能出現牽引板拉動放線滑車造成橫擔損毀的情況,因此放線滑車的偏轉角度是監測重點[17]。
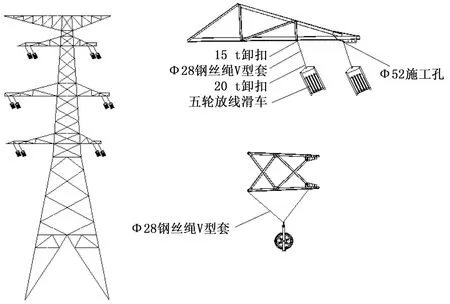
圖2 張力放線施工中的轉角塔懸掛放線滑車
2)當放線滑車兩側的導線張力發生變化時,容易出現放線滑車較大幅度的擺動,而放線滑車的擺動易造成導線在放線滑車上的扭轉,進而損傷導線,因此需要對放線滑車的位移進行監測,以便放線滑車出現大角度擺動時能夠及時發現并糾正。
3)為防止在比較惡劣的山區放線過程中導線出現損傷甚至鋁股絲斷裂而無法及時觀察到,必要時也需對放線滑車與導線的接觸情況進行監測。
根據相應放線滑車的施工需求,放線滑車的監測方案中分別對放線滑車載荷、放線滑車姿態、放線滑車實時運動變化及導線與放線滑車接觸進行實時監測。
2 監測系統結構及原理
根據監測需求的分析,設計了放線滑車施工過程監測系統。
通過傳感器等設備采集放線施工過程中放線滑車的載荷、實時位置及姿態角度等數據信息,并通過通訊網絡系統傳輸至監測數據分析模塊。
監測數據分析模塊結合施工過程狀態計算放線滑車載荷及姿態角度,并與采集數據進行對比。當計算與采集數據相差較大時進行放線狀態預警,由施工人員進行狀態調整后再繼續放線施工。監測系統原理如圖3所示。
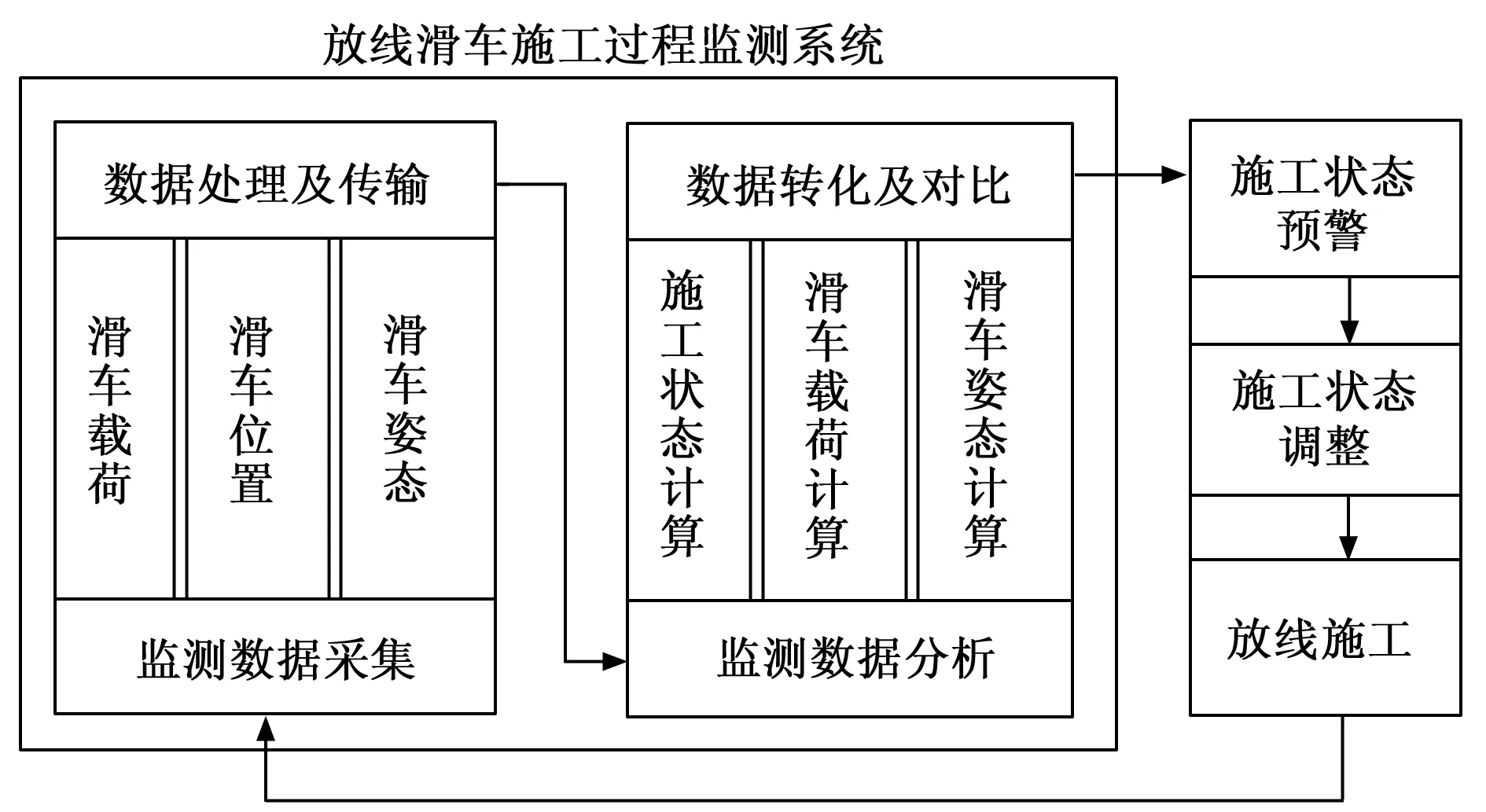
圖3 放線滑車監測系統原理
3 監測硬件設計實現
監測系統硬件設計包括載荷、空間姿態等參量傳感監測單元,及監測數據傳輸單元。
3.1 載荷監測模塊
采用具有高精度、低功耗特點的10 t無線拉力傳感器SC6415,如圖4所示。該傳感器為一個平板,由高強度特殊鋼材制成,以貼有應變片的彈性體為敏感元件,在外接激勵電源后,輸出與外加負荷(力)成正比例的信號。它與相應的儀器配套,可廣泛用于各種拉式受力結構場合。此外,還可以選用不同形式的配套儀器,以滿足計量、檢測、調節及控制等其它應用要求。

圖4 無線拉力傳感器SC6415
無線拉力傳感器在設備上的實際使用,還會受到溫度、側向分力的影響,因此在生產時已進行了溫度補償和信號輸出補償,確保可以達到現場實際使用精度。為防止在野外施工時雨霧等造成設備故障,防護等級設計為IP67。另外,為保證在放線過程中持續工作,傳感器配置了大容量鋰電池。
3.2 姿態監測模塊
采用基于3D-MEMS的高精度加速度傳感器實現重力參考系下放線滑車三軸傾斜角度的測量。傳感器結構如圖5所示,該傳感器主要是由彈簧、阻尼器及慣性質量塊組成的單自由振蕩系統。精度達到0.05°。
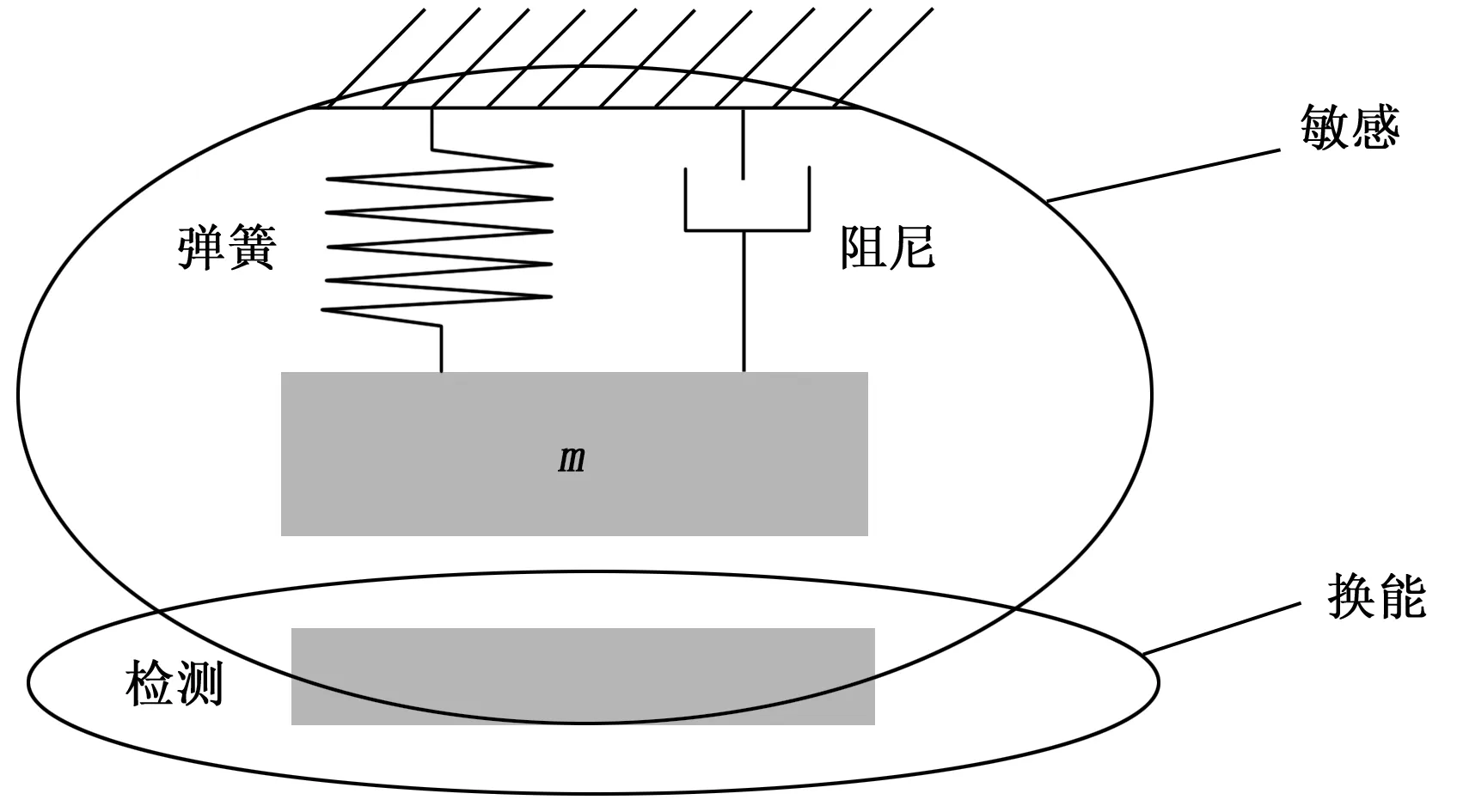
圖5 電容式加速度傳感器原理
3D-MEMS高精度傾角傳感器芯片結構相對復雜,傳感器中復雜的MEMS器件由多個獨立的微結構相互結合在一起形成一個具有優良性能整體的微結構器件。MEMS器件一般包含運動部件,目前MEMS器件的封裝主要依靠的還是IC封裝技術。
3.3 定位模塊
定位模塊采用智芯SC3405定位導航模塊,基于國產自主化GNSSSOC單芯片設計,支持中國的BDS(北斗衛星導航系統)、美國的GPS以及衛星增強系統SBAS(WAAS,EGNOS,GAGAN,MSAS),包含32個跟蹤通道,可以同時接收兩個衛星導航系統的GNSS信號,并可實現聯合定位、導航。SC3405模塊前置SAW和外置LNA,具有高靈敏度、低功耗、低成本等優勢。
3.4 視頻監測模塊
視頻監測模塊采用200 W低照度高清攝像頭,結合高集成度的SOC處理器,具有極低功耗,超強穩定的特點,可滿足導線與放線滑車接觸觀察需要;處理器支持H.265壓縮算法,保證圖像質量的同時有效降低網絡帶寬占用,并支持標準ONVIF協議,支持RTSP,支持RTMP,支持手機遠程監控,便于施工人員現場使用。
3.5 傳感器集成與數據傳輸
采用集成化技術將放線滑車載荷、姿態和實時位置監測傳感器與微處理器集成為一體,形成多參量傳感器,如圖6所示。

圖6 多參量監測裝置結構示意圖
結合智能信息融合技術建立傳感器多源異構信息模型,對多參量傳感器及其元數據進行統一建模,消除傳感器之間的差異性,便于對各類傳感數據進行融合[17]。
多參量監測裝置采集的信息經過收集、融合處理和傳送3個過程。監測裝置數據收集的作用在于整合來源于不同傳感器節點的數據,去掉冗余,獲得最小數據傳輸內容,減少數據傳輸代價。數據融合處理操作主要應用于一段時間內的感知數據,或者具有高相關性的簡單冗余數據,目的在于減少傳輸的數據量。同時,數據收集和數據聚集可以減弱錯誤數據對最終結果的影響,實現容錯功能。
以ARM-Cortext M0+內核的主控芯片為微處理器,充分利用其低功耗的特性和豐富的外設接口,外接各個模塊來實現放線滑車的數據監測及通信功能。
微功率無線通信單元兼有監測和信息處理功能,同時還具有記憶、存儲、解析、統計處理及自診斷、自校準、自適應和遠距離通訊等功能。采用支持遠距離傳輸的Lora芯片,通信距離可達2 000米。
放線滑車載荷、姿態、實時位置傳感器在采集數據后向主控芯片傳輸數據,主控芯片負責數據處理、協議封裝、參數監測、通信管理等。
電源單元負責產品的供電,采用大容量鋰電池實現。
監測系統可實現兩部分功能:組網和多參量監測。組網功能根據自定義的自組網協議實現與基建系統的組網,保證系統間的無線通信正常。多參量監測功能根據通信協議實現與感知模塊的通信,從而獲取實時的測量值,再通過無線功能上傳數據。
3.6 傳感器安裝
放線滑車的輪片在不同放線階段分別通過牽引繩和導線,為測量放線滑車所受的全部載荷,將拉力傳感器通過卸扣與連板相連接,再將連板與鐵塔連接,可實現放線滑車的載荷測量。
而姿態監測集成裝置通過夾持裝置安裝在連板下方的中心位置處,由于剛性框架的作用,可保證集成裝置與放線滑車心軸的運動狀態同步,如圖7所示。
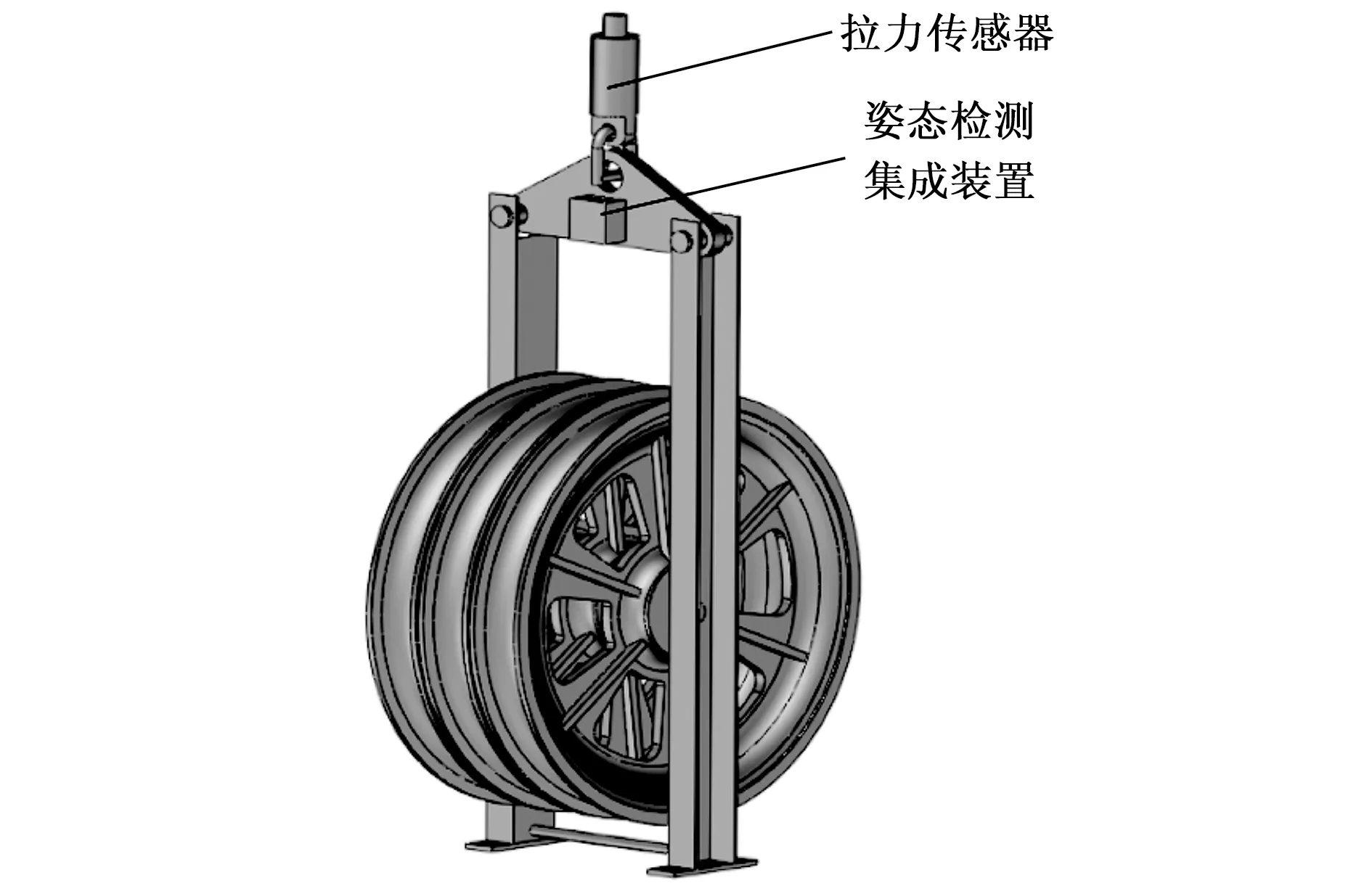
圖7 放線滑車監測安裝示意圖
視頻采集裝置的安裝方式有3種。方式一:通過連接桿(端部安裝攝像頭)延伸出放線滑車本體外,在保證放線滑車本體受力平衡的前提下,從連板的側上方拍攝放線滑車,可根據需要調整觀察位置,通過連桿向監測裝置傳輸視頻數據,實現導線與放線滑車不同接觸位置的觀察。方式二:將攝像頭通過連接件安裝在連板下方,固定角度拍攝放線滑車輪片,可實現放線滑車輪片兩側的導線情況,攝像頭可直接與監測裝置連接。方式三:攝像頭安裝在放線滑車周圍的塔體(鐵塔橫擔或者放線滑車附近的塔身)上,通過監控系統遙控攝像頭對準對焦到放線滑車進行拍攝。
視頻采集裝置的3種安裝方式各有優缺點,其中方式一、二的優點是攝像頭可隨放線滑車進行一體部署,隨放線滑車吊裝即可。但存在幾處風險:1)放線滑車依靠吊繩懸吊在空中,牽引繩/導線通過放線滑車時會使得攝像頭發生抖動,尤其是牽引板通過放線滑車時,攝像頭會劇烈抖動,影響視頻質量;2)當攝像頭安裝在連接桿時,容易在劇烈抖動或異常天氣下,從高空滑落,造成高空墜物傷人的風險;3)當牽引板通過放線滑車時,牽引板與放線滑車接觸碰撞時會發生偏擺,牽引板尾槌可能上下甩動,有碰撞到攝像頭的風險,增大了設備損傷的發生概率。
而方式三安裝方案的優點是安全性更高、空間寬裕、電池問題容易解決。缺點是需要施工人員在放線滑車附近的桿塔橫擔上安裝,且可能與放線滑車距離較遠,監測畫面不清晰,另外方式三攝像頭數據需單獨傳輸,無法通過集成裝置與其他數據一起發送。
4 監測數據分析實現
監測系統具備監測數據分析功能,結合放線施工計算方法,可以通過牽引繩、導線在不同階段的計算,獲得放線滑車對應的載荷、偏角等姿態的計算結果。監測系統將計算結果與放線滑車監測數據進行對比分析,實現施工過程的實時預警。
4.1 放線滑車狀態計算
以張力機、牽引機、放線滑車為放線系統的節點,牽引板為移動節點。設共有n+1個節點(放線滑車n-1個),節點間相對高差為hi,i=1,…,n,相對跨距為Li,i=1,…,n。
在放線分析計算中,認為導線、牽引繩是具有彈性的柔性懸鏈線,可以建立施工各檔的高差hci及跨距Lci的表達式[18]:
(i= 1,2,…,k)
(1)


首先,以放線滑車的頂部(導線/牽引繩與放線滑車輪片切線的交匯點,默認為放線滑車的最高點)為中心o,建立坐標系oxyz。其中z軸正方向為垂直向上,x軸為張力側的水平方向,平面Ω1(oxz)為張力側導線所在平面,平面Ω2為牽引側導線所在平面,Ω1與Ω2的夾角為β(即線路轉向角度,以繞z軸順時針方向為正),如圖8所示。
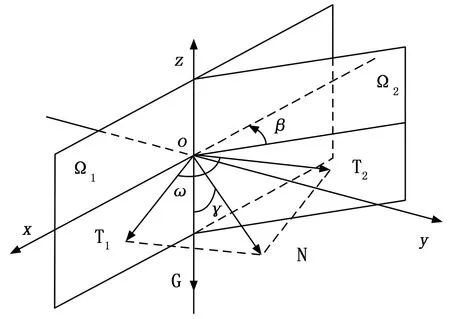
圖8 具有轉角線路的放線滑車示意圖
導線/牽引繩對放線滑車的切向力T1、T2可表示為坐標系oxyz下的矢量:
T2=Hi+1cosβi+Hi+1sinβj+Vi+1k
(2)
式中,i,j,k分別為坐標系oxyz各軸的單位向量,如圖9所示。由此可得到切向力的值,即
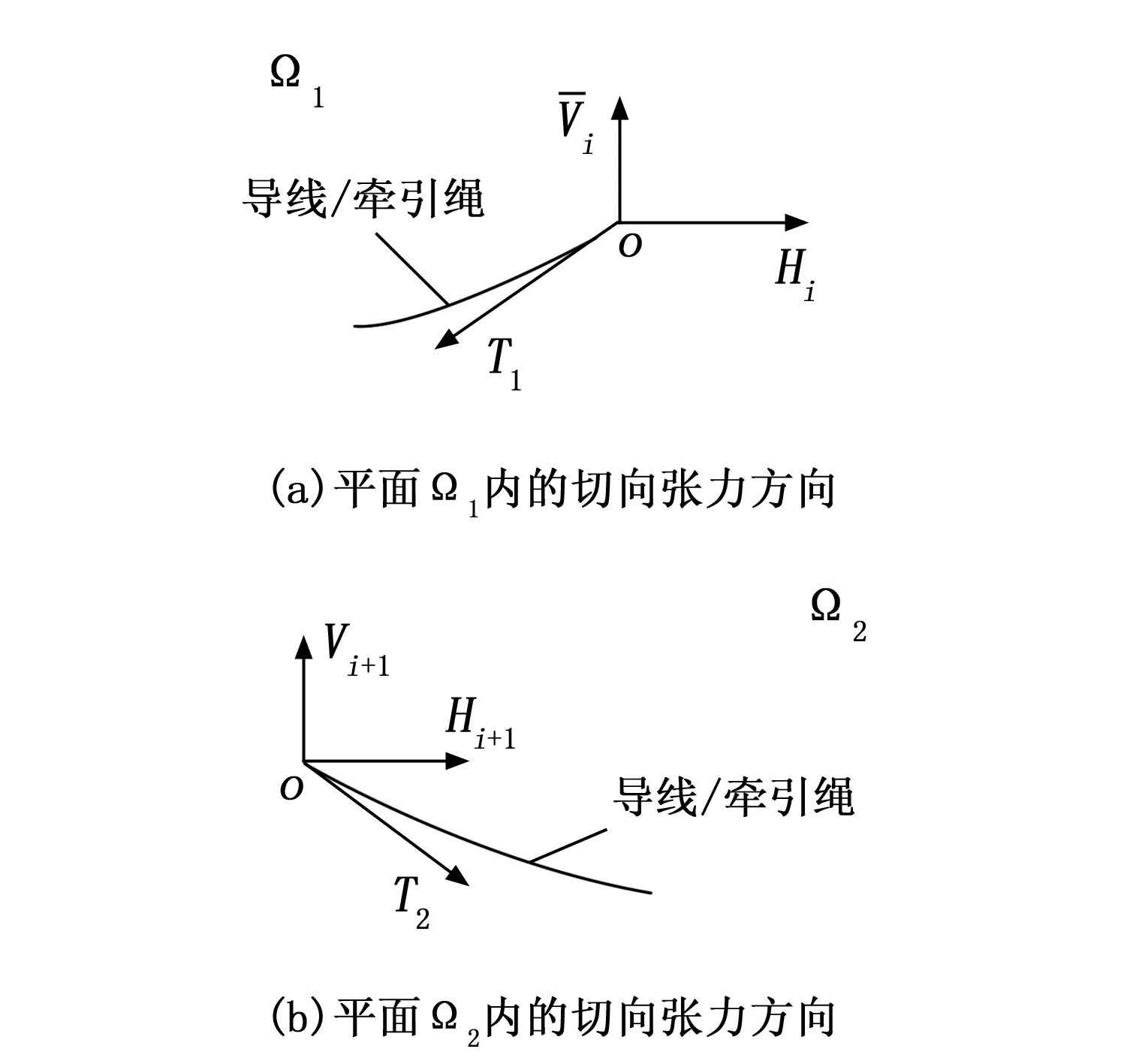
圖9 作用在放線滑車上的張力向量
導線/牽引繩對放線滑車的合力矢量為
N=T1+T2=
(3)
因此導線/牽引繩對放線滑車的作用力值為:
(4)
N與z軸的夾角γ即為放線滑車相對垂直方向k的偏斜角,如圖10所示,即
N·-k=|N|cosγ
(5)
則可計算得到
(6)
當考慮放線滑車重力G的影響時,N與z軸的夾角γ并不等于放線滑車與z軸的夾角θ。因此需考慮放線滑車的懸掛結構,根據放線滑車在N、G作用下的力矩平衡計算夾角θ。如圖10所示。
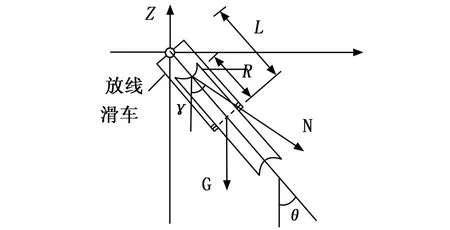
圖10 放線滑車作用力與z軸夾角
以放線滑車懸掛點為原點建立力矩平衡方程,認為放線滑車的重力集中于放線滑車的中軸上,中軸與原點距離為L。導線/牽引繩對放線滑車的作用力N作用在放線滑車輪片頂部,與中軸距離為放線滑車半徑R,如圖10所示。則力矩平衡方程可表示為:
|G|Lsinθ= |N|(L-R)sin(γ-θ)
(7)
則可計算得到
(8)
在此以一牽1(1根牽引繩牽引1根導線)為例進行計算分析,當采用一牽2或一牽4(1根牽引繩牽引2根或4根導線)施工工藝,則有2根或4根導線通過放線滑車,當導線通過放線滑車,采用式(8)計算θ時,N應為2根或4根導線對放線滑車的作用力。
4.2 監測數據分析
在放線滑車的初始坐標系oxyz中,以面內水平方向i、放線滑車側面法向j、垂直方向k為正交的基矢量。在導線/牽引繩對放線滑車的作用力及自身重力作用下,放線滑車經過空間轉動,轉動后固結在放線滑車的主軸基矢量變為i′、j′、k′,如圖11所示。
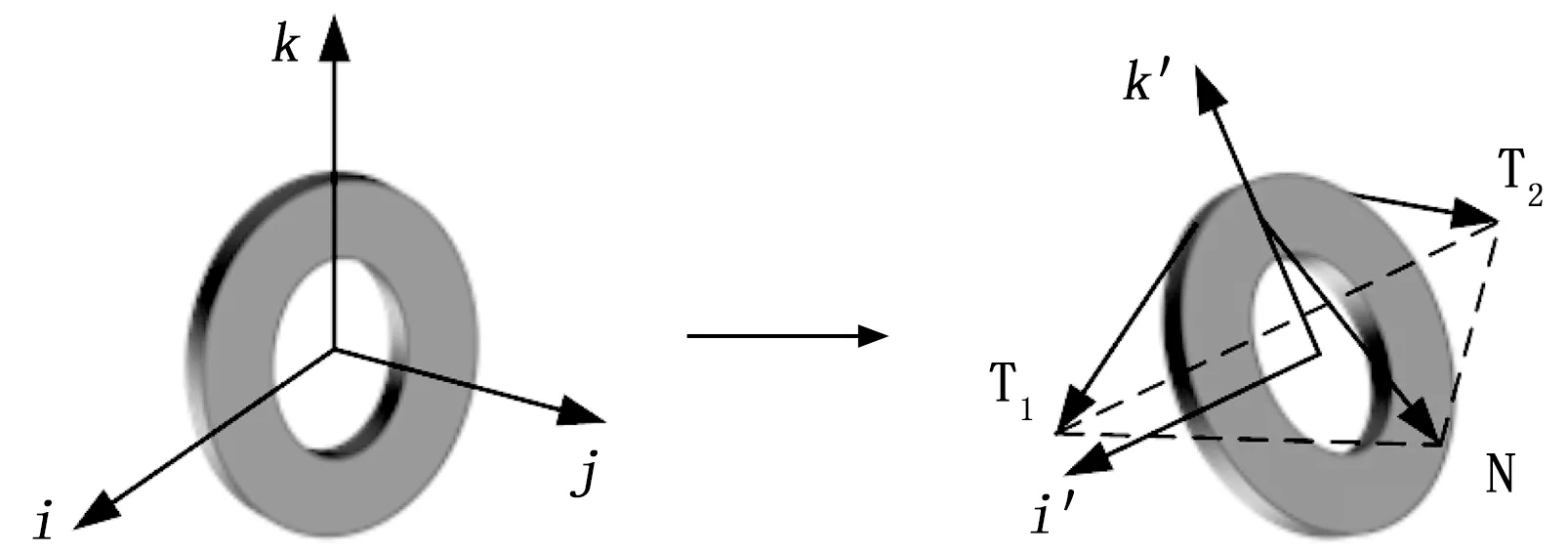
圖11 放線滑車的坐標變換
由于放線滑車摩擦系數較小,在此認為|T1|=|T2|。放線滑車在導線/牽引繩在壓力作用下隨之調整角度,放線滑車的面內主軸i′與張力合力N垂直,可由N與初始坐標系的垂直方向k確定:
(9)
主軸k′可由N/|N|繞i′轉動γ-θ得到(轉動方向由i′方向確定),根據Rodrigues變換可知
(10)
進而可知j′=k′×i′。
計算主軸i′、j′、k′在初始坐標系下的方向余弦,即可得到放線滑車相對初始坐標系的轉動角度。
根據放線施工數據按以上方法計算各項結果,并與監測數據進行對比。根據放線施工影響因素及測量需求分析,當監測值與計算值相差較小時(在此認為相差不超過8%),認為施工過程正常;當監測值與計算值相差較大時(在此認為相差超過8%),認為施工過程存在異常,及時采取暫停施工等措施進行調整及恢復。具體流程如圖12所示。

圖12 監測系統實施流程
5 驗證試驗
在青海-河南±800 kV特高壓直流線路工程某標段中開展了現場放線驗證試驗,放線區段長度為11 200 m,經過鐵塔23基。采用一牽2展放方式,以□28防扭鋼絲繩作為牽引繩,展放1 250 mm2導線。
在5#放線滑車安裝載荷監測模塊、姿態監測模塊。監測從牽引板通過5#放線滑車開始,直至牽引板經過9#放線滑車。
將放線過程中獲得的監測數據與相應位置的計算結果進行對比分析,驗證監測系統的有效性。由于放線過程時間長,采集數據量大,因此僅輸出部分關鍵施工數據,并進行對比。
1)放線滑車載荷:
在牽引板通過5#~9#放線滑車時,5#放線滑車的載荷監測數據與對應的計算數據相比有1~2 kN的偏差,相對偏差的絕對值平均為2.43%,如圖13所示。考慮到放線施工中放線滑車受導線運行、風載晃動等因素影響造成的載荷變化,可以看出該數據測量精度較高,且與計算數據符合良好。
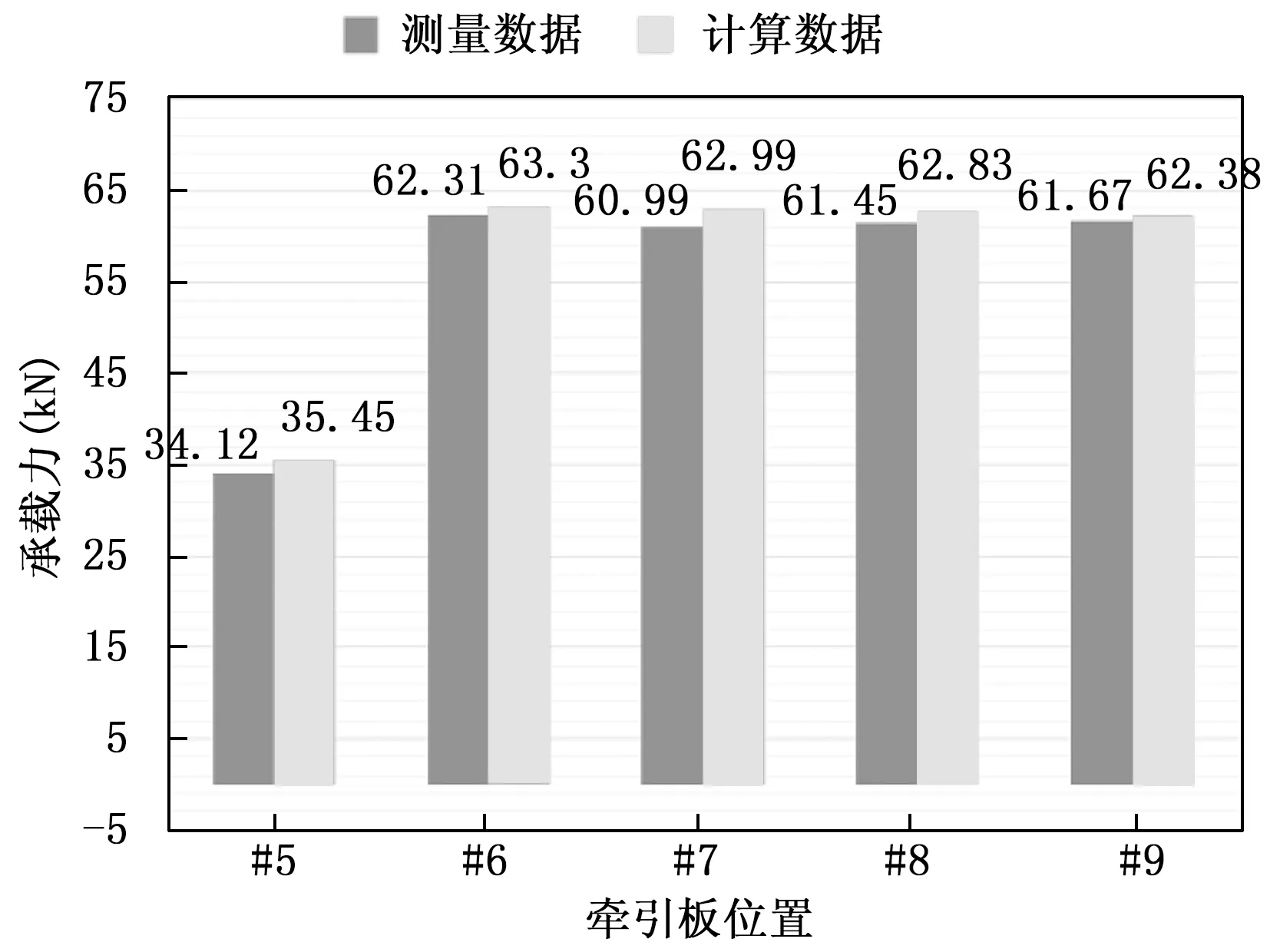
圖13 放線滑車載荷數據對比
2)放線滑車姿態:
由于5#放線滑車所在鐵塔的線路轉角僅為1°,放線滑車的側面法向j基本無變化,因此僅列出牽引板通過5#~9#放線滑車時,5#放線滑車的面內水平方向i的轉動角度(k與i的轉動角度相同),如圖14所示。相對偏差絕對值平均為6.64%。考慮到上文提到的施工因素影響,可以看出放線滑車轉動角度測量精度較高,且與計算數據符合良好。
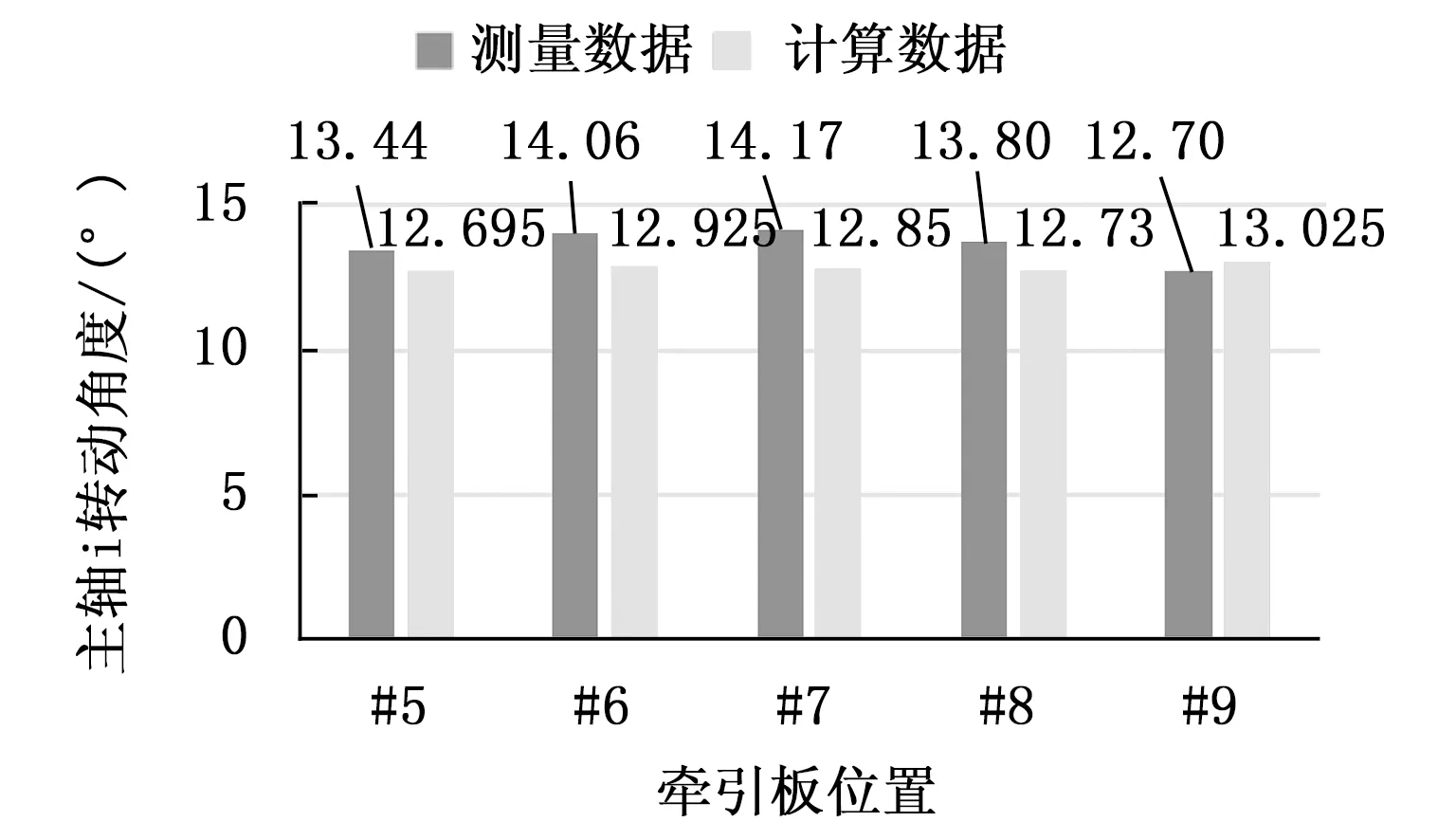
圖14 放線滑車主軸i轉動角度數據對比
綜合以上情況可以看出,監測數據與計算數據相差較小,兩者基本一致,相對誤差滿足分析要求,表明監測系統對放線滑車載荷、空間姿態角度的數據監控有效。
6 結束語
根據監測需求的分析,設計放線滑車狀態監測系統,采用集成化技術將放線滑車載荷、姿態和實時位置監測傳感器與微處理器集成為一體,形成多參量傳感器,實現放線滑車的載荷、姿態等實時監測。
結合放線施工過程中牽引繩、導線的狀態,計算放線滑車的載荷、偏角等姿態實時結果,并轉化為與監測數據對應的數據,與傳感器測量數據進行對比,實現狀態的監測分析。
通過實際輸電線路工程中的驗證試驗,驗證了監測系統的有效性和準確性,可在實際輸電線路張力放線施工中作為放線滑車的連續監測手段。
猜你喜歡
建材發展導向(2022年18期)2022-09-22 07:13:20
建材發展導向(2022年12期)2022-08-19 02:33:10
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年22期)2022-01-18 06:12:46
建材發展導向(2021年19期)2021-12-06 03:20:50
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年12期)2021-07-22 08:06:58
建材發展導向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產業(2016年2期)2016-03-01 01:25:48