雜波背景下慢動目標多特征融合檢測系統設計
2022-08-02 11:00:48史亞鋒王曰根呂春雷
計算機測量與控制 2022年7期
史亞鋒,王曰根,呂春雷
(1.中國電子科技集團公司第五十二研究所,杭州 311100;2.中國科學院長春光學精密機械與物理研究所,長春 130033)
0 引言
在智能交通、智能化檢測、軍用目標檢測等方面,目標檢測已逐步深入到人類的日常生活和工作中。目標檢測是一種利用目標的幾何特性和統計學特性進行圖像分割的方法。該方法實現了對目標的分割與識別,其精確度和實時性是整個系統的一個重要功能。但是對于同一幀雜波視頻下的目標和障礙物而言,由于其均處于同一雜波背景中,二者之間的電磁特性非常接近[1],再加上慢速特性以及其他干擾因素的影響,使得被檢測目標產生的回波能量非常低,很難對其進行精準檢測。為此,相關目標檢測方法引起了學者的廣泛關注。
黃鳳青[2]等在雙通道卷積自編碼器的基礎上實現了對慢動目標的檢測。將時頻譜寫入到卷積自編碼器模型中,利用IQ雙通道結構來提升目標回波的幅度值,并將所有目標的特征值融合在一起;最后通過跳躍連接結構分析目標尺度,以此突出目標的特征,實現精準檢測。仇國慶[3]等利用視覺特征融合的方法實現紅外弱小目標的檢測。在Laplace算法的基礎上,對原始圖像銳化處理,以此獲得圖像的邊緣信息,提高圖像整體的像素強度;利用局部多項梯度算法對障礙物和雜波背景進行抑制,突出被檢測目標的灰度差異特征;通過目標特征融合和自適應閾值處理,完成紅外弱小目標檢測。
上述兩種方法均未對采集到的原始圖像進行噪聲去除處理,導致最終的檢測效果存在一定的誤差。為此,本文提出雜波背景下慢動目標多特征融合檢測系統設計方案。系統硬件部分實現了圖像的預處理和模數轉換,并通過DSP[4](Digital Signal Processing,數字信號處理)模塊控制其他模塊;軟件部分實現了慢動目標多特征融合檢測、系統通信以及存儲。硬件和軟件組合在一起,將雜波背景下目標的多特征進行融合,融合結果即慢動目標特征檢測結果。性能測試結果表明,本文系統得到的檢測精度最高,所花費的時間最少。
1 慢動目標多特征融合檢測系統設計
為了提高慢動目標檢測系統的準確性和檢測率等,本文引入了多特征融合算法,并且設計了檢測系統的硬件部分,實現慢動目標檢測。目標檢測設計流程如下:
1)設計慢動目標多特征融合檢測系統框架。
2)硬件設計:設計預處理模塊、模數轉換模塊、DSP模塊。
(1)預處理模塊:有源低通濾波所獲取的視頻序列,消除其中包含的高頻噪聲。
(2)模數轉換模塊:采集目標的多普勒回波信號,通過 DSP模塊和并行外部接口實現數據互傳。
(3)DSP模塊:標記內容、控制目標多特征融合、與其他模塊通信以及與存儲模塊信息互傳。芯片采用的是TI公司設計的TMS320C6203B。
3)軟件設計:設計慢動目標多特征融合監測模塊、通信接口模塊、存儲模塊和特征提取模塊。
(1)慢動目標多特征融合監測模塊:在檢測視頻中慢動目標之前,通過對比目標的相似性,實現慢動目標多特征融合監測。
(2)通信接口模塊:利用虛擬串口轉換技術,將DSP模塊的USB接口轉換為虛擬的RS232串口,實現信息傳遞。
(3)模塊和存儲模塊:作用是存儲數據,采用TS201片上存儲器。
(4)特征提取模塊:采用LBP算子方法提取慢動目標的特征。
1.1 慢動目標多特征融合檢測系統框架
根據提高目標檢測的準確性的目的,基于上述三點目標檢測流程,本文設計了慢動目標多特征融合檢測系統,該目標檢測系統的框架如圖1所示。

圖1 慢動目標多特征融合檢測系統框架
根據圖1可知,慢動目標多特征融合檢測系統由硬件部分和軟件部分兩部分組成,其中硬件部分包括預處理模塊、模數轉換模塊[5]、DSP模塊,軟件部分包括慢動目標多特征融合檢測模塊、通信接口模塊、存儲模塊以及特征提取模塊。預處理采集的視頻序列后,有效抑制了雜波及其他干擾的影響,為后續實現更精準的檢測做好基礎準備工作。
1.2 硬件設計
為了成功實施雜波背景下慢動目標多特征融合檢測系統,設計硬件部分的預處理模塊、模數轉換模塊、DSP模塊,具體設計如下。
1.2.1 預處理模塊
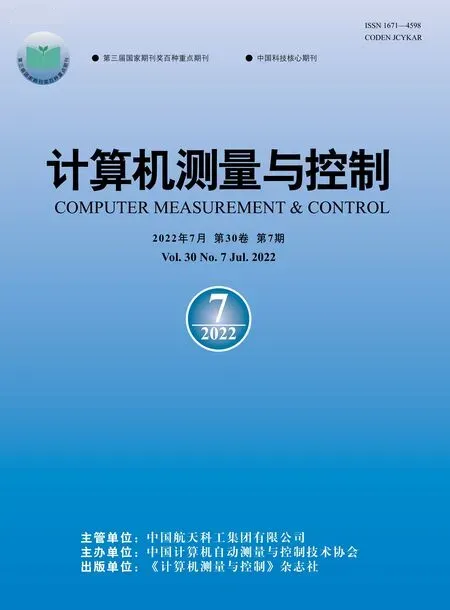
預處理模塊是對采集到的視頻序列進行有源低通濾波,消除其中包含的高頻噪聲[6]。為了后續目標檢測時能有效抑制共模增益,在設計該模塊時,低通濾波的輸出端利用二階有源巴特沃思濾波器實現了差分輸出[7],具體過程如圖2所示。
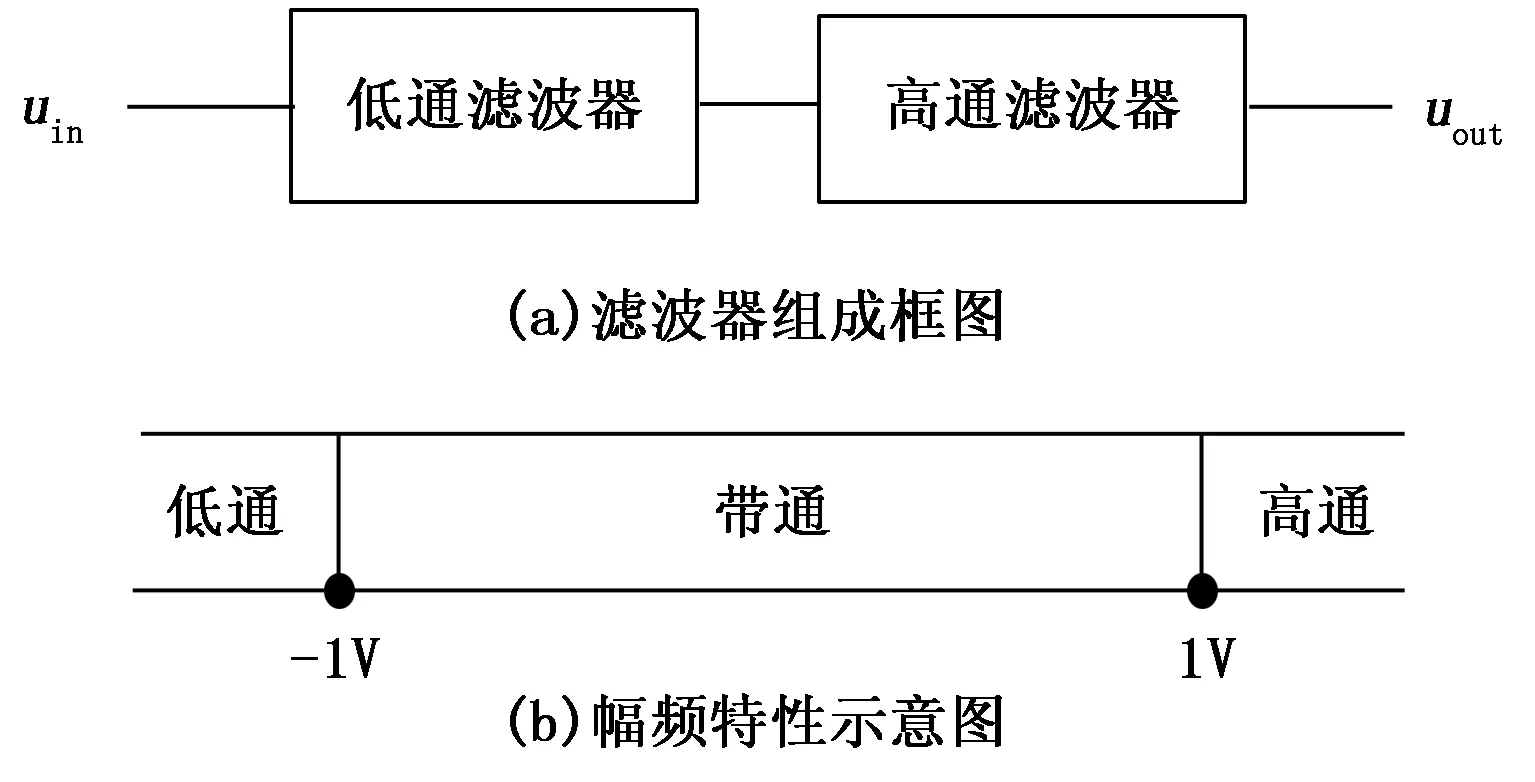
圖2 濾波器原理
圖2所示的濾波器AD芯片采用的是2.4 V電壓,差分輸入峰值低于2.2 V,目標回波幅度為[-1 V,+1 V],保證后續檢測的高精準度。濾波器的通帶增益Ao=-2,為了降低高頻噪聲的干擾,同時保證目標信號的無損失,將截止頻率設置為fc=4 kHz。
選擇AD公司研發的AD8132差模放大器實現差分輸出。該放大器具有超強的過載恢復能力,不用配備相應的A/D轉換器,不會對低頻信息或直流信息產生任何影響,可以有效保證預處理的可靠性。在實際應用中,AD8132的同相端[8]輸入信號時,其反相輸出端采用了與同相端相同的電路結構,以確保系統整體電路的均衡性和運行可靠性。電路結構如圖3所示。
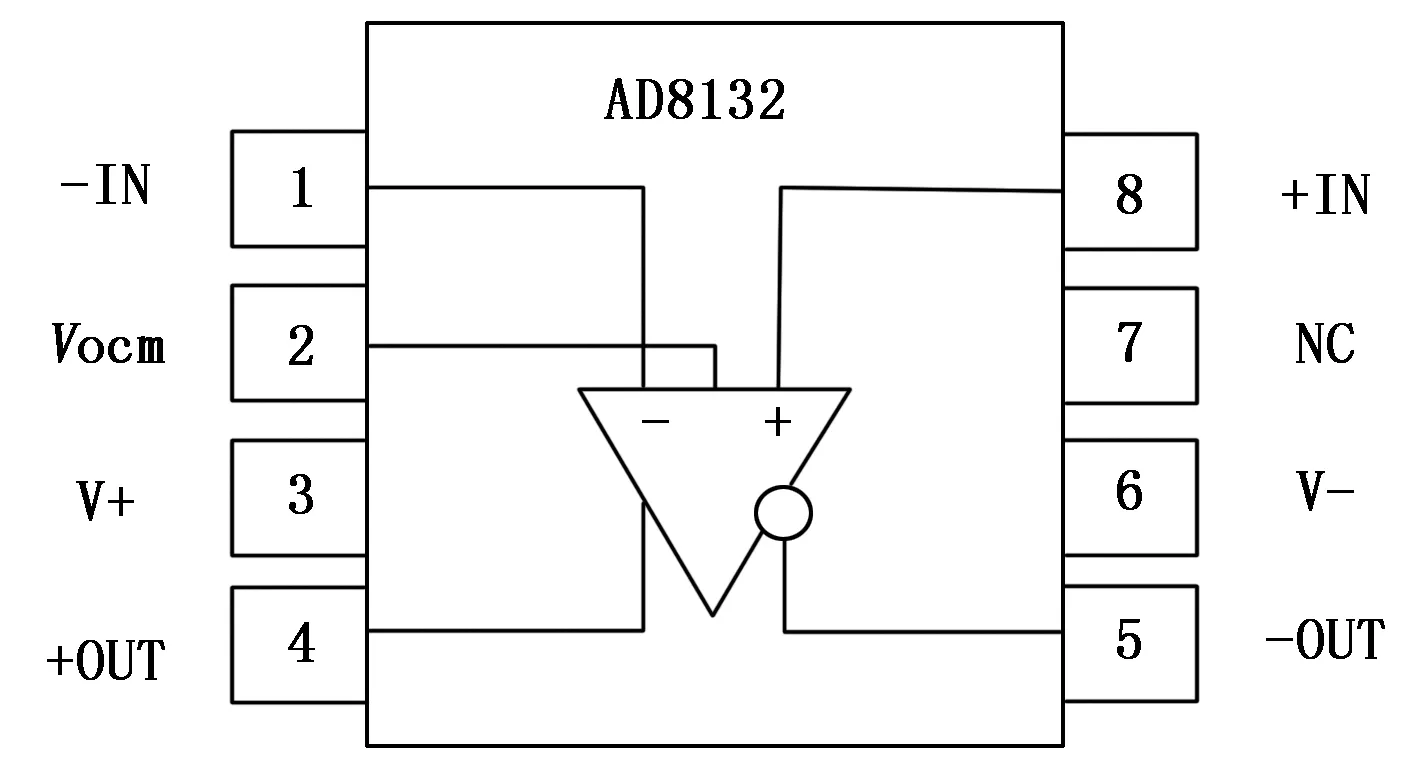
圖3 AD8132差模放大器電路結構
1.2.2 模數轉換模塊
模數轉換模塊的主要作用是通過數字方式獲取目標主體的多普勒回波信號,通過并行外部接口和 DSP實現數據互傳。
本文設計的檢測系統要求各個模塊都盡可能地保留目標回波信號,同時抑制雜波的影響,降低信號的抖動頻率,保證系統的低功耗。對于模數轉換芯片的選取,需要配備相應的輸出接口和PPI(parallel peripheral interface,并行外設總線)端口[9],具體接口如圖4所示。
圖4 通信接口示意圖
根據圖4可知,PPI端口主要包括模擬輸入、AD配置、時鐘配置、上電配置、數據輸出等部分。本文選用的模數轉換芯片為AD公司設計的具有超高性能的14位AD6644模數轉換器,輸出的格式為二進制補碼,可以更好地抑制共模增益,降低雜波背景的干擾。AD6644內部具有三級轉換結構,保證系統具有更高的檢測精度。
1.2.3 DSP模塊
DSP模塊芯片采用的是TI公司設計的TMS320C6203B,頻率為250 MHz,內部配備了384 kB的RAM(random access memory,隨機存取存儲器)和512 kB的數據RAM。同時,DSP模塊設計了多通道緩沖串口,與系統的存儲模塊可直接進行信息傳輸。具體連接情況如圖5所示。
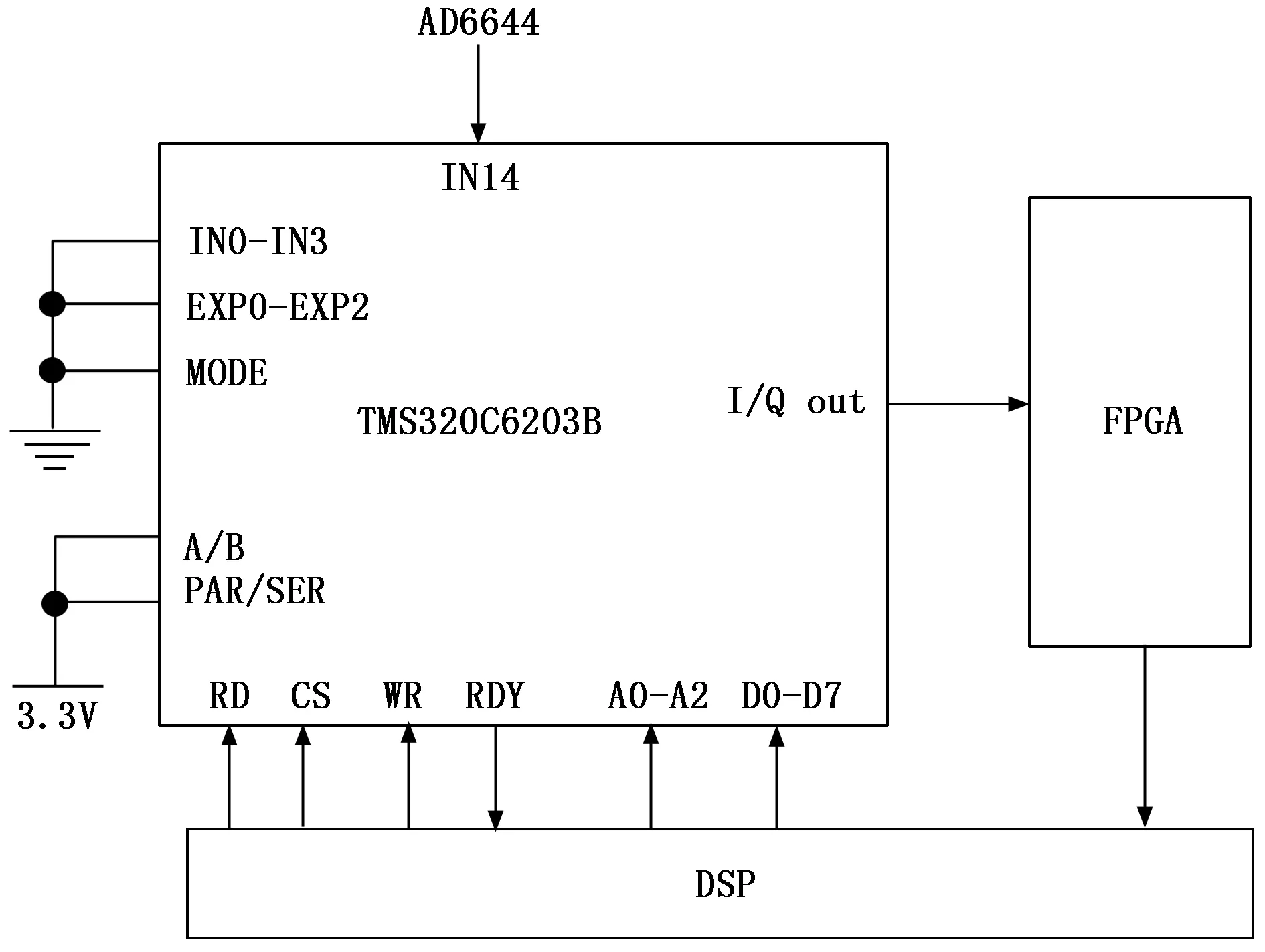
圖5 DSP連接示意圖
DSP在系統中的作用是控制其他模塊,具體細分為內容的標記、控制目標多特征融合、與其他模塊通信以及與存儲模塊信息互傳等。DSP模塊可剔除除目標主體外的其他障礙物或區域,僅保留目標信息,然后將其打包,傳輸至存儲模塊中。
1.3 軟件設計
在DSP集成開發環境Code Composer Studio上,采用了模塊化的設計思想完成了軟件設計,主要由慢動目標多特征融合檢測模塊、通信接口模塊、存儲模塊以及特征提取模塊四部分構成。
1.3.1 慢動目標多特征融合監測模塊
該模塊在實際應用過程中,首先選取一段視頻圖像,在檢測視頻中慢動目標之前,需要將其分為若干個子區域,并計算每個子區域的CLBP(完全局部二值模式)直方圖[10]和色調直方圖[11]。然后通過對比目標的相似性,實現慢動目標多特征融合監測。
假設Mt表示t時刻時子區域的CLBP直方圖,該區域慢動目標的相似性表示為:
(1)
式中,i表示子區域CLBP直方圖的維度值,最大維度為n,M1,i、M2,i分別表示在i維度下,子區域CLBP直方圖向量的歸一化處理[12]結果,M1、M2分別表示子區域1、2的CLBP直方圖。當M1=M2時,式(1)的計算結果為1。給定一個閾值σ,當SCLBP(M1,M2)≥σ時,說明子區域1、2之間具有相似的CLBP紋理特征。
每個子區域慢動目標的色調直方圖相似性表示為:
SHue(N1,N2)=
(2)
式中,N1、N2分別表示子區域1、2的色調直方圖,D表示子區域的長度,W表示子區域的寬度,N1,i、N2,i分別表示子區域1、2在維度i下的色調直方圖的歸一化處理結果。設定閾值為μ,當SHue(N1,N2)≥μ時,說明子區域1、2具有相似的色調特征。
對于閾值σ和μ,選值要格外注意,如果定義的值太大或太小,就會導致慢動目標的多特征與背景混淆在一起,無法實現精準檢測。通常情況下會將σ和μ的值定義在[0.7,0.9]范圍內,本文取其中間值0.8。
將CLBP紋理特征和色調等多種特征融合在一起,所能獲得的即目標的最終特征,因此多特征融合檢測問題也可以轉化為融合目標檢測問題,為此在式(1)和式(2)的基礎上,選取某一塊子區域與雜波背景模型做相似性計算,如式(3)所示:
S=αSCLBP(Mt,Mt,j)+(1-α)SHue(Nt,Nt,j)
(3)
式中,α表示多特征的融合的因子,取值范圍為0≤α≤1,Mt,j、Nt,j分別表示背景模型中t時刻的第j個子區域,Mt、Nt分別表示子區域在t時刻下的CLBP直方圖和色調直方圖。
對于α值的確定,如果檢測條件較好,一般取α=0.5;如果雜波背景影響較大,就要適當增大CLBP直方圖相似性的權重值,α取值一般在[0.7,0.9]范圍內,本文取中間值0.8;如果圖像受到較大的陰影干擾時,就要適當增大色調直方圖的相似性,α取值一般在[0.1,0.3]范圍內,本文取中間值0.2。
在視頻圖像序列中,如果存在子區域的i值取值范圍為1≤i≤L(其中,L表示第L個子區域),即可認定該子區域與雜波背景模型的相似度為S<2.5ηt,m(ηt,m表示t時刻下,子區域中第m個高斯分布的方差),則認定該子區域為圖像背景,否則為目標。進一步利用GMM(gaussian mixed model,高斯混合模型)方法來更新雜波背景模型中的參數,具體實現過程如下所示:
1)預處理雜波背景模型;
2)將預處理后的背景模型代入到當前幀圖像中,并將其分為若干個子區域;
3)計算每個子區域的CLBP直方圖和色調直方圖;
4)將子區域圖像與雜波背景模型做相似性匹配[13]計算。如果二者匹配則將子區域代入到背景模型中,并更新圖像整體參數,根據權值大小選擇前m個背景模型后返回步驟(2);如果二者之間不匹配則將雜波背景模型中權值最小的篩選出來,明確慢動目標的多特征融合結果。
1.3.2 通信接口模塊
通信接口模塊采用DSP的多總線通信模塊,其主要作用是建立系統各個模塊之間的溝通連接。當圖像經過預處理模塊和DSP模塊后,根據上位機中的緩沖空閑標志位[14],判定是否向目標多特征融合檢測模塊和存儲模塊發送圖像數據。
為了降低系統軟件部分的開發難度,通信接口模塊利用了虛擬串口轉換技術,將DSP模塊的USB接口轉換為虛擬的RS232串口。DSP負責通訊和控制總線規范, IIC總線負責采集和通信現場的數字信號,CAN (controller area network)總線負責與伺服設備的通信, SPI串行口負責高速的數據傳輸和存儲,以太網則負責將最終的測試數據打包上傳到網管中心進行數據共享。CAN總線的體系結構可劃分為數據鏈路層、物理層和應用層3個層次。
1.3.3 存儲模塊
存儲模塊本文采用的TS201片上存儲器,每個內核獨享100 kB高速、專用L1存儲器[15],大于128 kB的大容量信息將存入L2存儲器內。TS201還有一個優勢就是可以通過EBIU(外部總線接口單元)接口向外延伸,得到SDRAM(同步動態隨機存取內存)[16-18]和Flash兩種存儲器。
SDRAM存儲器由2片MT48L32M16A2組合在一起構成,可存儲圖像數據或者圖像處理過程數據[19-20]。Flash存儲器外擴的內存大小通常為64 MB,由S29GL064M90T構成,主要存儲DSP模塊和目標多特征融合檢測模塊傳輸過來的數據。存儲模塊框架圖如圖6所示。
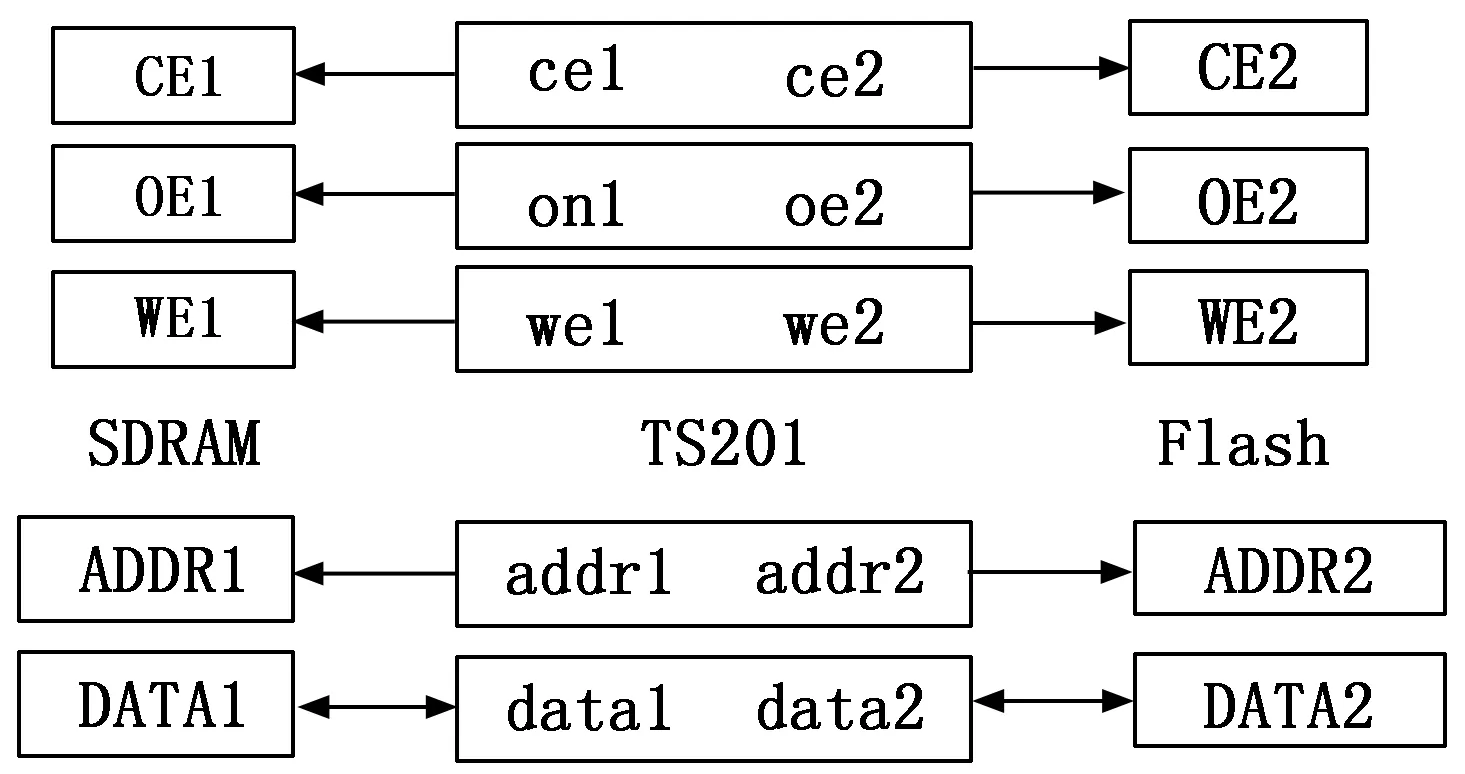
圖6 存儲模塊框架圖
外部擴展總線是由端口模擬而構成的,包括信號線、讀/寫控制信號線、片選信號線和中斷請求信號。初始化程序設計實現主設備的初始化,一串口的初始化和與主控制器芯片的數據通信,這些都是系統軟件的基礎。主控制器的軟件實現主要是完成核心驅動的功能,具體而言,就是只使用一種基本的數據傳輸方法。在此基礎上,建立了相應的功能函數,實現了數據傳輸等操作。框架類協議在設備類中實現了一種傳輸協議,它可以執行不同類型的子類請求指令,從而對設備進行不同的訪問和讀寫操作。在本設計中,基本數據傳輸的實現包含在傳輸函數中,該函數是嚴格按照協議格式編寫的傳輸子程序,其參數包括傳輸數據的長度,數據緩沖區地址指針,端點和包號PID和負載。在參數和標識位初始化階段,將內部地址分配到DATA0和DATA1,DATA1將有效負載加到DATA0上。
1.3.4 特征提取模塊
LBP特征描述符是一種特殊的紋理描述符,它被廣泛地應用于各個領域中,并在人臉識別中取得了很好的效果。當背景復雜邊緣雜亂無章時,HOG 特征效果不佳,局部二值模式在這方面是互補的,將邊緣形狀特征和紋理信息結合在一起,可以更好地捕捉目標的外觀。
LBP算子以鄰近區域3*3為界,以鄰近區域的中心像素作為閾值,將鄰近8 個像素的灰度與中心像素進行對比,如果鄰近像素值大于中心像素值,則將其編碼為1,否則為0。通過改進LBP算子擴展3*3的鄰域擴展到任意一個相鄰域,從而得到了p個 LBP算子的公式:
(4)
式中,(x,y)表示中心像素點;gc表示中心像素點的灰度值;gi表示鄰域內像素點的灰度值;p表示采樣點個數;R表示圓的半徑。若p等于8,則對均勻模式的LBP算子編碼時,按從小到大的順序其LBP圖譜對應的灰度值為1~58,非均勻模式則被編碼為0,即灰度值為0,故均勻模式的LBP圖譜相比圓形LBP圖譜整體偏暗。
綜合上述內容,實現了雜波背景的處理和慢動目標的多特征融合,完成了雜波背景下慢動目標多特征融合檢測系統設計。
2 試驗結果分析
為了驗證本文設計的檢測系統在實際應用中是否合理有效,與引言中提到的雙通道卷積自編碼器和視覺特征融合算法展開了性能對比測試。
2.1 試驗設置
實驗是在MATLAB7.0平臺上實現的,CPU為6 GHz,Windows 7 旗艦版,64 位操作系統。在四段視頻內截取4張含有慢動目標的圖像,如圖7所示,其大小為320×256,灰度級為256,圖像背景中含有一定的噪聲。
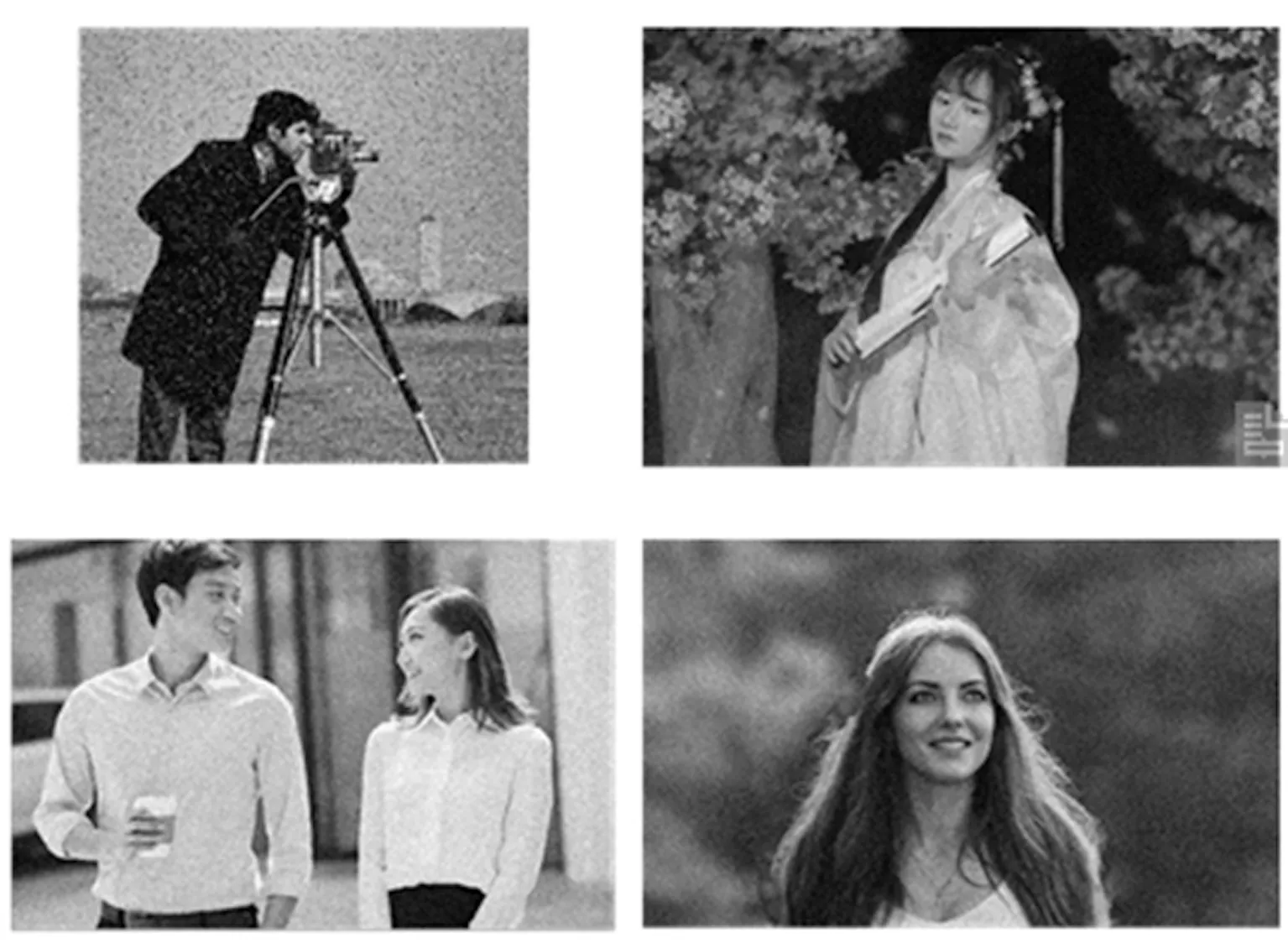
圖7 原始圖像
以圖7所示的原始圖像為基礎,分別進行檢測性能、檢測概率、檢測效率測試、CPU占比以及抗干擾性能,具體步驟如下:
檢測性能測試:分別利用本文方法與雙通道卷積自編碼器、視覺特征融合算法3種算法對四段視頻中的慢動目標進行特征融合,通過對比3種算法應用后的圖像噪聲分布情況驗證其檢測性能,其中噪聲分布越少,證明背景中多余信息和無用信息更少,對應算法的特征融合效果越好,檢測性能越好。
檢測概率測試:將原始圖像的信噪比σ定義為:
(5)
式中,GT表示目標主體的最大灰度平均值,GT表示原始圖像的灰度平均值,σ表示灰度標準差。
再從一段視頻序列中截取含有慢動目標的4張雜波圖像,記為圖像1~4。圖像具體參數如表1所示。

表1 圖像參數
設置4張圖像的多特征融合結果數量分別為65、69、78和95,分別利用3種算法對4張圖像進行檢測,對比其多特征融合結果數量與預設數值的差異,驗證其檢測概率。
檢測效率測試:以檢測花費的時間為對比指標,取同一段視頻序列中4張圖像,分別使用3種算法對其進行檢測,驗證算法的檢測效率。檢測花費時間越短,證明對應算法的檢測效率越高。
CPU占比以及抗干擾性能測試:隨機選取150張原始圖像,通過計算機自帶軟件統計CPU占比,CPU占比高,即證明該方法下的設計系統出現了計算機運行卡頓現象。同時選取信噪比峰值為實驗性能指標,信噪比峰值越大,則表明該方法下系統的抗干擾性能越好。
2.2 結果分析
2.2.1 3種算法檢測性能對比
首先對比本文方法與雙通道卷積自編碼器、視覺特征融合算法在慢動目標多特征融合檢測方面的性能,結果如圖8所示。
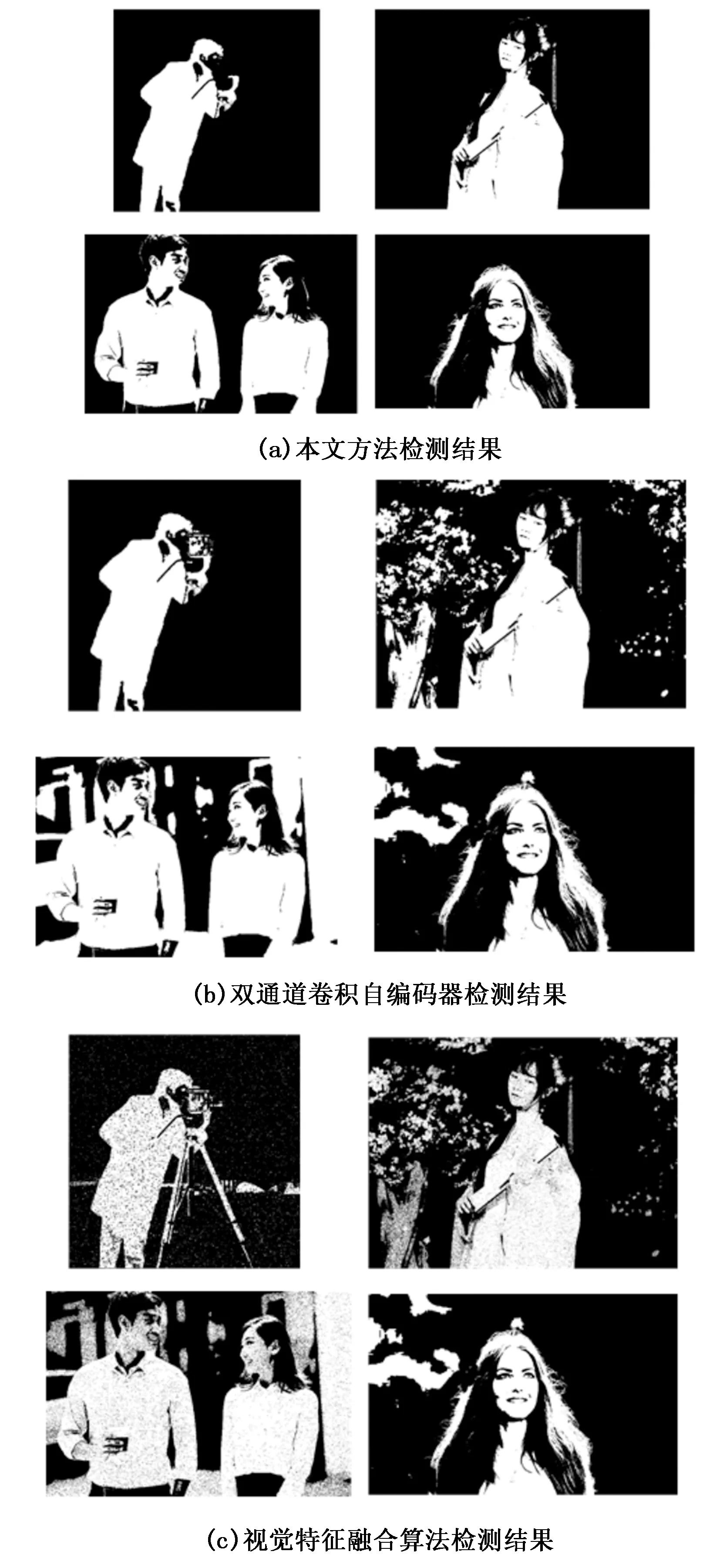
圖8 3種算法檢測結果對比
從圖8中可以看出,由于原始圖像雜波背景的影響,對比算法的檢測結果中含有大量的多余信息和無用信息,使得目標多特征融合檢測結果誤差較大。而本文方法的檢測結果中沒有出現多余的部分,有效抵抗了雜波背景的影響,得到了精準的多特征融合檢測結果。其主要原因是本文方法將原始圖像分成了若干個子區域后計算了其CLBP直方圖和色調直方圖,通過與背景模型的相似性匹配,提高了最終檢測結果的精度。
2.2.2 3種算法檢測概率對比
3種算法的檢測概率結果如表2所示。

表2 3種算法檢測結果
通過表1可以很清楚地看出,隨著視頻序列的時間推移,目標特征亮度越來越小,σ值最終也從1.474降到了-0.022,說明圖像4中的目標特征最大灰度平均值要比圖像整體的灰度均值低。結合表2可知,在這種影響因素較多的情況下,本文方法依然取得了非常理想的多特征融合檢測正確率,平均值達到了99.1%,雙通道卷積自編碼器為93.7%,視覺特征融合算法為95.8%。綜合對比之下,可以發現本文方法具有更高的檢測概率。
2.2.3 3種算法檢測效率對比
利用3種方法對同一段視頻序列中4張圖像的檢測花費時間對比結果如圖9所示。

圖9 3種算法檢測效率對比
通過圖9可以看出,隨著圖像中目標融合數量的逐漸增多,本文方法所需的檢測時間呈現緩慢增長趨勢,且整體波動較為平穩。而其他兩種方法的檢測時間曲線均出現了大幅度的增長,尤其是雙通道自編碼器,曲線波動較大,說明該算法的穩定性較差。
2.2.4 3種算法檢測目標的CPU占比對比
設計方法是否具有實際應用價值,需要分析很多指標,其中一個指標為CPU占比,如果設計方法在運行時CPU占比高,導致計算機運行出現卡頓等現象,則其應用價值不高,即檢測方法的存在一定的局限性,需要進一步改善,因此,為了進一步驗證該方法的性能,對比分析檢測方法的CPU占比,此次分析隨機選取100張原始圖像,通過計算機自帶軟件統計CPU占比,實驗結果如表3所示。
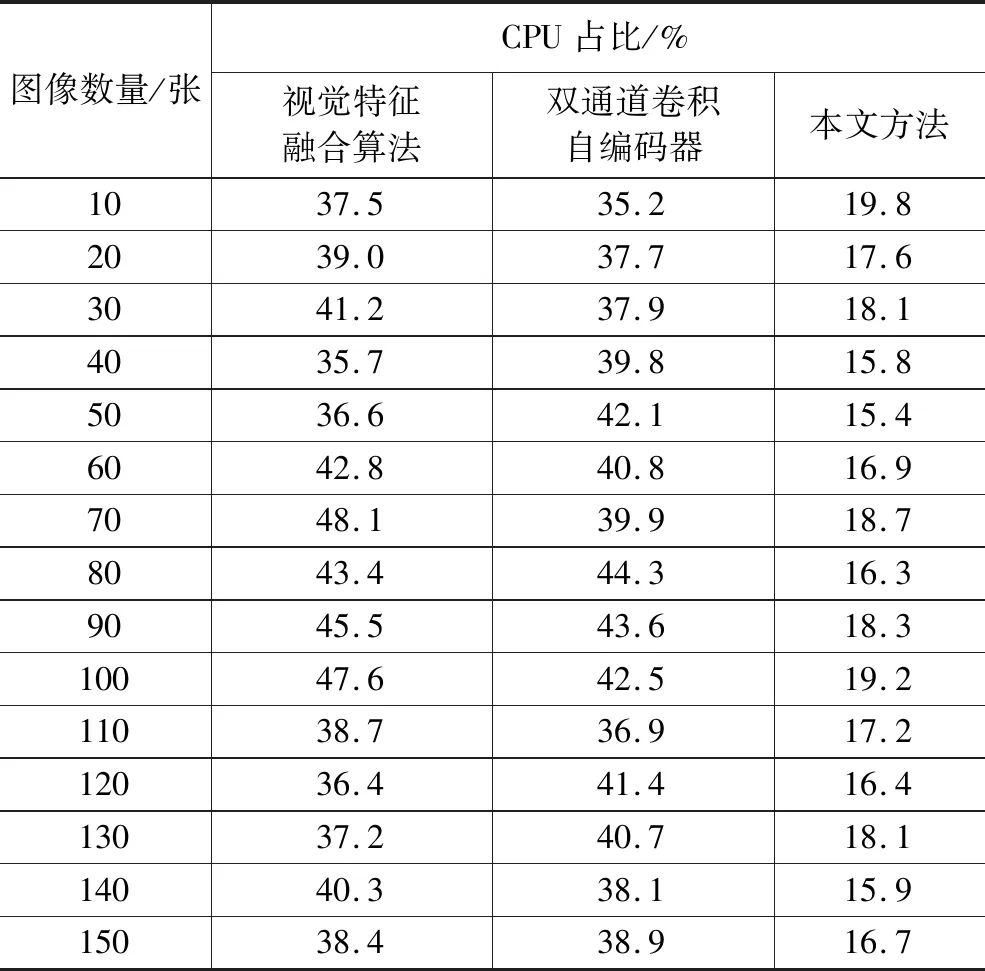
表3 3種算法檢測的CPU占比結果
根據表3可知,視覺特征融合算法的CPU占比均在35.0%以上,最高CPU占比達到了48.1%,雙通道卷積自編碼器的CPU占比也均在35.0%以上,其最高CPU占比達到了44.3%,該值雖然低于視覺特征融合算法的CPU占比最高值,但是也相對較高,本文方法CPU占比均在20.0%以下,CPU占比最高值僅為19.8%,3種目標檢測方法相比可知,本文方法的CPU占比最低,分別比視覺特征融合算法和雙通道卷積自編碼器降低了15.0%以上,因此,本文方法有效地降低了CPU占比,提高了慢動目標檢測的運行效率,具備一定的應用價值。
2.2.5 3種方法抗干擾性對比
在實際檢測慢動目標時,實際場景下目標檢測經常受到各種各樣的干擾,導致檢測結果不準確,因此,目標檢測方法的抗干擾性能,以信噪比峰值為實驗性能指標,信噪比峰值越大,則表明驗證的方法的抗干擾性能越好。實驗隨機選擇150張原始慢動圖像,整體實驗數據如表4所示。

表4 3種算法信噪比峰值對比結果
根據表4可知,3種目標檢測方法的信噪比峰值均沒有隨著檢測數量的增加而增加,整體呈現相對穩定的狀態。視覺特征融合算法的信噪比峰值最低為4.11 dB,最高信噪比峰值僅為4.97 dB,雙通道卷積自編碼器的信噪比峰值最低為4.12 dB,最高信噪比峰值僅為4.98 dB,這兩種方法的信噪比峰值相對較低,本文方法的信噪比峰值最低為8.61 dB,最高信噪比峰值僅為8.93 dB,本文方法的最低信噪比峰值分別比視覺特征融合算法和雙通道卷積自編碼器的最高信噪比峰值高出3.64 dB和3.63 dB,3種目標檢測方法相比,本文方法的信噪比峰值最高,因此,本文方法的抗干擾性能最佳,有效提高了抗干擾性能。
3 結束語
在雜波環境下,由于雜波中噪聲的影響,會嚴重降低視頻質量,給目標跟蹤和識別造成不便。因此,如何在雜波環境下有效識別目標,融合慢動目標特征成為相關領域亟需解決的問題。本文設計的慢動目標多特征融合檢測系統,可有效抑制雜波的干擾和影響,具有較高的檢測精度和檢測效率,能很好地適應復雜檢測背景。但是本文設計的檢測系統在處理雜波影響較為嚴重的圖像時,檢測精度還有一定的提升空間,下一步將以此為研究重點,進行更深入地研究。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54