基于駕駛員轉向模型的共享控制系統
2022-08-01 01:42:02田彥濤趙彥博
自動化學報 2022年7期
田彥濤 趙彥博 謝 波
眾所周知,自動駕駛分為5 個階段,分別是輔助駕駛系統、部分自動駕駛、有條件的自動駕駛、高度自動駕駛、完全自動駕駛.有一部分專家跳過人機共享控制的過程,直接對無人駕駛進行研究,2013 年,姜巖等[1]提出基于微分約束的橫縱向協同規劃算法,用高階多項式模型在預瞄距離內對可行駛曲線進行建模,橫向規劃算法提供橫向安全性,縱向規劃算法保證了縱向安全性,最終能夠實現封閉環境下速度低于 40 km/h 的無人駕駛.2017 年,田濤濤等[2]提出了一種基于無模型自適應控制的無人駕駛汽車橫向控制方案,其實際是運用了預瞄偏差角構成橫向控制的數據模型,從而避免了對無人車復雜模型的建模,進而設計自適應算法,該方法對復雜的無人駕駛運行有較好的自適應性.一定環境條件限制下的無人駕駛研究得到了較快的發展,但是當前駕駛的現實情況下是無法忽略駕駛員的,則本文著重考慮人機共駕的共享控制過程.
共享控制的應用廣泛,可應用于飛行領域、車輛駕駛領域、智能輪椅領域以及機器人等領域[3?8],以車輛駕駛為例,當前無人駕駛存在安全性和可靠性無法保障的問題時,共享駕駛在目前汽車行業發展過程中能夠發揮其積極的作用[9?11].因此,在保證車輛行駛安全性的基礎上,如何合理分配二者的駕駛權重以及優化共享系統的性能是共享控制的核心問題[12?14].2004 年,Griffiths 等[15]較早地針對人機共享控制問題展開研究并取得了一定的研究成果,其研究結果表明通過對駕駛員進行觸覺輔助能夠提高駕駛精度、減輕駕駛員負擔,但是其未考慮當駕駛員與控制器發生控制沖突時,應該如何有效分配控制權.2016 年,Erlien 等[16?17]提出了基于模型預測的避障預測觸覺反饋控制方案,系統引入安全駕駛包絡的概念,使得系統能夠包容不同的駕駛風格,大大降低了人機之間不必要的控制沖突.2018 年,Nguyen 等[18]提出了一種新的共享控制方法用于車道保持系統,該方法能夠合理地分配駕駛員與控制器的駕駛權,并且能夠有效降低兩者之間的沖突,但其缺乏對駕駛員不同駕駛狀態下的人機共享的討論.2019 年,Ji 等[19]提出了一種基于隨機博弈的共享控制框架,從而有效地模擬駕駛員與智能系統之間的轉向力矩,該框架下博弈的合理性得到了有效的驗證.本文則從駕駛員的角度出發,在并聯方式的間接共享控制的結構下,建立駕駛員轉向操控模型,并利用遺傳算法辨識駕駛員模型參數,可以得到一個與駕駛員特性相近的模型,其合理性得到驗證,在辨識出相關參數后,將其作為共享控制器應用至共享控制系統,同時對駕駛員不同駕駛狀態下的人機共享控制作進一步分析,從而能夠得到該模型能夠有效增加駕駛精度,減輕駕駛員的駕駛負荷.本文的主要貢獻有:1) 針對駕駛員轉向模型的參數辨識問題,本文采用遺傳算法對駕駛員轉向模型的視覺預瞄參數、補償參數與神經肌肉系統參數進行辨識,獲得了很好的擬合效果;2) 針對車輛與道路曲率變化對駕駛員模型參數的影響,本文基于上述辨識方法進一步分析不同車速和道路曲率下駕駛員模型參數的變化情況,并建立了駕駛員神經肌肉系統相關參數與車速之間的函數關系,以達到增加駕駛員模型參數適用范圍的目的;3) 針對駕駛員不同駕駛狀態下的人機共享問題,本文將已辨識的理想駕駛員模型應用至共享系統,并基于模擬駕駛實驗平臺對共享系統進行在線實驗,實驗結果說明該系統能夠在不同的駕駛員轉向操作下保證車輛行駛的安全性與軌跡跟蹤的精確性,同時能夠減輕駕駛員的駕駛負荷.
本文結構安排如下:第 1 節對駕駛員轉向行為進行描述并對駕駛員轉向行為進行建模;第 2 節分別對實驗場景與駕駛員狀態信息進行采集,并對第 1節得到的駕駛員轉向模型進行參數辨識;第 3 節給出仿真實驗結果,并對結果進行分析;第 4 節得出結論.
1 駕駛員轉向模型建立
借鑒文獻[20]并聯方式的間接共享控制結構,如圖1 所示,駕駛員與控制器分別作用于轉向角權重分配,綜合作用于車輛.

圖1 間接共享控制結構圖Fig.1 Indirect shared control structure
1.1 視覺預瞄、補償與傳遞延遲
本文使用基于兩點預瞄特性與神經肌肉系統的駕駛員轉向模型結構[21],主要包括視覺預瞄模塊、視覺補償模塊和神經肌肉模塊,如圖2 所示.該模型可簡化為兩點預瞄模型[22],如圖3 所示.圖3 中近預瞄點用來計算車輛與道路中心線的偏差距離,遠預瞄點用來估算前方道路的曲率大小.在圖3 中,lf代表遠預瞄點與車輛距離,ln代表近預瞄點與車輛距離,Rt代表轉彎中心到遠預瞄點的距離,Rv代表車輛的轉彎半徑;因此可以得到,遠預瞄點處的偏差角θf與近預瞄點處的偏差角θn可表達為[22]

圖2 駕駛員轉向結構示意圖Fig.2 Driver steering structure

圖3 駕駛員兩點預瞄示意圖[22]Fig.3 Two-point preview of driver[22]

式 (2) 中,預瞄側向偏差為yL,車輛航偏角為φL,θf是視覺預測模塊Gp的輸入,θn是視覺補償模塊Gc的輸入,Gp和Gc分別表達為[22]

其中,預測模塊的比例增益為Kp,補償模塊的比例增益為Kc,車輛行駛速度為v,補償速率為TL,補償頻帶為TI.時間延遲可以用純滯后環節 e?τps進行表達,為提高模型的通用性,對此采用一階泰勒近似,即

延遲模塊作用于神經肌肉系統,進而通過神經肌肉系統作用于方向盤,因此,接下來需要對神經肌肉系統進行建模與分析.
1.2 神經肌肉模型
本文借鑒了英國劍橋大學的 Pick 等[23?24]的肌電分析方法得到了肌電信號與轉向力矩的關系,以及清華大學劉亞輝等[25]提出的駕駛員神經肌肉收縮以及物理變化過程的一些研究結論,從而搭建神經肌肉系統的傳遞函數模型.該模型由前饋GNa、反饋GNf與神經肌肉動力GNM三個部分構成,如下所示[22]:

其中,Kr是力矩與轉角間的比例系數;v是車輛的縱向速度;TN是神經肌肉的時間因子;Kt是轉向角偏差的比例因子.綜上所述,駕駛員模型的傳遞函數如圖4.其中代表駕駛員意圖產生方向盤轉角,δsw代表反饋的方向盤轉角,Γs代表反饋力矩,Γd代表模塊輸出力矩.為了方便參數辨識過程,將駕駛員模型的傳遞函數改寫為駕駛員轉向模型的狀態空間形式:

圖4 駕駛員轉向模型Fig.4 Driver steering model

其中,x1,x2,x3是傳遞函數轉換成狀態空間過程中產生的中間變量,是輸入輸出之間的一種線性組合.
2 參數辨識
2.1 實驗場景與駕駛員狀態信息采集
本文著重考慮轉彎時的轉向特性,建立雙向單車道如圖5 所示,其中,路面坡度為 0,附著系數設為 1,長度為 3 m,兩線間隔為 6 m,單側道路寬度為 3.5 m.

圖5 模擬駕駛實驗場景Fig.5 Driving simulation experiment scenario
道路的俯視圖如圖6 所示,由直線段和半徑分別為200 m、300 m 的 90°彎道組成實驗道路,采用內置的車輛模型,由于現有的設備與方法還暫時無法檢測出駕駛員視覺感知的遠預瞄點和近預瞄點誤差的真實值,因此,根據文獻[22]的論述,本文選取車輛前方行駛路徑中心 5 m 遠處為近預瞄點,車輛前方道路間隔線 10 m 遠處為遠預瞄點.其次,為了便于模型參數的辨識,本文將每次實驗中車輛的行駛速度v設定為常數.因此,實驗時車速為 72 km/h,轉彎半徑為 200 m.

圖6 模擬駕駛實驗場景 (單位:m)Fig.6 Driving simulation experiment scenario (unit:m)
2.2 駕駛員轉向模型參數辨識
為了研究駕駛員轉向特性,只選取彎道路況數據,數據集截取各個變量 800~2 200 之間的 1 400個數據點,駕駛員力矩數據序列濾波后如圖7 所示.

圖7 駕駛員力矩濾波與截取Fig.7 Filtering and interception of driver torque
可以看出濾波后的曲線更加平滑.遺傳算法與傳統算法相比較具有能夠求出優化問題的全局最優解、優化結果與初始條件無關、具有較強的魯棒性和適合于求解復雜的優化問題等諸多優點,故本文選用遺傳算法對模型參數進行辨識.
基于實驗并結合文獻[26]給出的參數大致取值范圍,遺傳算法的主要參數取值如表1 所示.

表1 遺傳算法主要參數取值Table 1 Value of main parameters of genetic algorithm
將 8 個待辨識參數看作遺傳基,采用實數編碼方法,故可將其表示為

本文為了使駕駛員真實值與模型輸出值的總體誤差最小,將目標函數定義為誤差函數的 1/2,即

其取值范圍的上限與下限分別設置為

因為采集的數據為離散序列,式 (9) 和 (10) 的駕駛員模型數據變化是連續的,所以需要對采集數據進行離散處理,即

其中,I代表三階單位矩陣,T0.02 s,代表采樣周期.目標函數值在車速為 72 km/h 時的迭代尋優曲線如圖8 所示,最小值為 0.891,駕駛員力矩的真實輸出曲線與辨識模型輸出曲線的擬合程度如圖9所示.

圖8 目標函數值(v=72 km/h,R=200 m)Fig.8 Value of objective function(v=72 km/h,R=200 m)

圖9 駕駛員力矩測量值與辨識值對比(v=72 km/h,R=200 m)Fig.9 Comparison of measurement and identification value (v=72 km/h,R=200 m)
可以看出,駕駛員真實值的變化與最優個體的模型輸出值的變化基本一致,則模型參數的最優個體取值為

為了更好地驗證模型的準確性,截取第2 段彎道來驗證模型性能,車速仍為 72 km/h,驗證結果如圖10 所示.

圖10 駕駛員力矩測量值與模型輸出值對比Fig.10 Comparison of measurement and model output value of driver torque
可以看出,駕駛員真實值與模型輸出值變化趨勢幾乎一致.最大力矩誤差值為 0.298 N·m,如圖11所示,力矩誤差的和方差SSE1.784,均方差MSE0.0013,均方根RMSE0.036.

圖11 駕駛員力矩誤差值Fig.11 Error value of driver torque
為了進一步分析不同車速、道路曲率下駕駛員模型參數的變化情況,分別將轉彎半徑設為 200 m和 300 m,采集多組駕駛員在 54 km/h,63 km/h,72 km/h,90 km/h,108 km/h,126 km/h 下的參數變化情況,變化結果分別如表2 和表3 所示.

表2 轉彎半徑為200 m 的駕駛員模型參數Table 2 Driver model parameters with turning radius of 200 m
為了對數據進行更加直觀的分析,將表2 和表3數據分別制作成圖表的形式,如圖12 和圖13 所示,可以看出,車速和視覺補償增益Kc是反比例關系,車速與駕駛員神經肌肉系統反饋剛度Kt是正比例關系.

圖12 不同車速下模型參數平均值對比(R=200 m)Fig.12 Comparison of mean values of model parameters at different vehicle speeds (R=200 m)

圖13 不同車速下模型參數平均值對比(R=300 m)Fig.13 Comparison of mean values of model parameters at different vehicle speeds (R=300 m)

表3 轉彎半徑為300 m 的駕駛員模型參數Table 3 Driver model parameters with turning radius of 300 m
而車速分別在 72 km/h 和 90 km/h 且轉彎半徑不同的情況下,Kt無明顯變化.另外Kr在當前實驗情況下變化不明顯,TN也基本保持不變,約為 0.01.可見轉彎半徑對參數變化影響不大.因此本文主要討論Kt與速度的關系,相關參數的誤差指標如表4和表5 所示.

表4 駕駛員模型的辨識誤差指標(R=200 m)Table 4 Identification error index of driver model (R=200 m)

表5 駕駛員模型的辨識誤差指標(R=300 m)Table 5 Identification error index of driver model (R=300 m)
當轉彎半徑為 200 m 時,利用Kt與車速v的數據進行一次曲線擬合.擬合范圍即速度的變化范圍,擬合函數如式 (18),擬合曲線如圖14 所示.由圖14 得,曲線的擬合精度達到 99.82%,和方差為0.045.

圖14 轉彎半徑為200 m 時神經肌肉反饋剛度與車速的擬合曲線Fig.14 Fitting curve of K t and v at turning radius of 200 m

當轉彎半徑為 300 m 時,擬合函數如式 (19),擬合曲線如圖15,曲線擬合精度達到 99.15%,和方差為 0.4432.可見式 (19) 的擬合度相對較低,這可能是由于參數辨識精度不高或模型的非線性造成的.

圖15 轉彎半徑為300 m 時神經肌肉反饋剛度與車速的擬合曲線Fig.15 Fitting curve of Kt and v at turning radius of 300 m
由于在車速變化的情況下存在采樣的數據點也在變化的問題,為了解決采樣數據點變化的問題,本文采用數據的均方差和均方根誤差來進行分析.如圖16 所示,模型的辨識誤差隨著車速的增加而增加.同樣也表明速度在 54~72 km/h 的范圍內時,模型的辨識誤差小,此時駕駛員的轉向行為更加平穩.

圖16 不同車速下駕駛員模型辨識誤差指標對比(R=200 m)Fig.16 Comparison of driver model error index at different vehicle speeds (R=200 m)
當車速為 90 km/h 時,模型辨識誤差顯著增加,說明駕駛員的轉向行為表現較差.圖17 進一步驗證了速度較高模型辨識誤差大的結論.另外,隨著轉彎半徑增大,會使模型辨識誤差減小,即駕駛員的轉向行為變得穩定.

圖17 不同車速下駕駛員模型辨識誤差指標對比(R=300 m)Fig.17 Comparison of driver model error index at different vehicle speeds (R=300 m)
3 仿真實驗與結果分析
這里沿用了文獻[20]中所提出的模糊權重分配策略,該策略主要負責根據輸入變量(橫向偏離程度LD與轉向角精確程度 Δφcd) 的變化實現轉向角權重值的合理自適應分配.其變化規則如下:
1)LD相同時,控制器控制權隨著轉向角精確度的增加而逐漸減小;
2) 當控制器轉向角更精確且轉向角精確度相同時,LD越大控制器控制權越大;
3) 當駕駛員轉向角更精確且轉向角精確度相同時,LD越大控制器控制權越小;
4) 當控制器與駕駛員轉向角相等,控制器控制權保持不變.
最終輸出便是合理的權重分配系數,進而得到期望轉向角,其具體表達為


其中,kc是控制器權重,kd是駕駛員權重.由此能夠更好地驗證駕駛員模型,并且能夠有效地進行在線共享控制實驗,獲取相關特性.
3.1 理想駕駛員模型參數選取
駕駛員模型結構簡單,辨識精度高,本文的目的是基于駕駛員轉向模型設計共享控制器,以滿足駕駛員與控制器共享控制的需求.因此,本文的理想駕駛員采用 CarMaker 的內置駕駛員模型.采集轉彎半徑為 200 m,車速分別為 54 km/h,63 km/h,72 km/h,83 km/h 和 94 km/h 時的理想轉向數據,從而得到神經肌肉反饋剛度與車速的關系.選取車速為 72 km/h 時的理想駕駛員轉向數據,并利用遺傳算法辨識模型參數,駕駛員轉向力矩的真實值與辨識值對比如圖18 所示.

圖18 辨識模型與真實測量轉向數據對比Fig.18 Comparison of identification model and measurement value
可以看出,辨識力矩值的擬合程度非常高,且變化趨勢基本一致,誤差非常小,當前情況下的模型參數為

進一步選取車速為 54 km/h,63 km/h,83 km/h和 94 km/h 的理想數據,并得到相關評價指標,統計結果如表6 所示,顯然Kt與車速之間呈近似正比例關系,根據曲線擬合方法,擬合范圍為實驗選取的速度范圍,可得到二者的一次函數關系為

表6 不同車速下的駕駛員模型參數辨識結果Table 6 Identification of driver model parameters at different vehicle speed

如圖19 所示,擬合精度較高,因此,本文將利用包含車速的解析形式表示反饋增益Kt.

圖19 數據點與擬合曲線Fig.19 Fitting curve and data point
由于本文駕駛員模型的輸出為駕駛員力矩,所以需要建立轉向系統模型,從而連接駕駛員與模糊權重分配模塊.轉向系統傳遞函數的形式為

其中,Gsw代表轉向系統的傳遞函數,Kgw代表模型增益,Tz代表函數零點,Tp1和Tp2代表函數極點.
轉向系統模型參數的辨識結果如圖20 所示,可以看出辨識精度較高,圖21 進一步驗證了模型的準確性.可見該模型能夠有效描述轉向系統,辨識后的模型可寫為

圖20 辨識模型值與真實測量值對比Fig.20 Comparison of identification model value and measurement value

圖21 已辨識模型的輸出值與真實測量值對比Fig.21 Comparison of the output value of the identified model with the measured value

其中,零點?0.298 與極點?0.31 非常接近,零極點抵消后的模型為

3.2 共享控制系統在線測試與評價
3.2.1 共享控制器單獨駕駛測試
為了討論控制器對于該模型的表現性能,首先則對控制器在不同的行駛速度下的轉向性能進行實驗檢測.本文采用 Simulink 和 CarMaker 聯合仿真的方式進行實驗,采用 CarMaker 內置車輛模型,在 Simulink 中搭建控制器.實驗結果如圖22 所示,由于道路寬度為3.5 m,顯然當車速為120 km/h時,車輛右側已經駛出道路邊界線,另外,當車速低于120 km/h 時,車輛能夠有效通過轉彎半徑為200 m 的彎道.

圖22 不同車速下車輛中心點與道路內邊界的距離Fig.22 Distance between vehicle center point and road internal boundary at different vehicle speeds
另外,從圖23 看出模型輸出力矩隨著速度的增加而增加,從圖24 看出方向盤轉角也是隨著速度的增加而增加,由此可以得出速度越快,控制器的控制力度越大,由此來保證車輛轉彎的通過性與安全性.圖25 得到不同車速下車輛的路徑跟蹤偏差,可以看到速度越快,路徑跟蹤的偏差越大,當車速小于 94 km/h 時,車輛的路徑跟蹤偏差都能夠保持在一個較小的范圍內.

圖23 不同車速下共享控制器的輸出力矩Fig.23 Output torque of shared controller at different vehicle speeds

圖24 不同車速下方向盤的輸出轉向角Fig.24 Output steering angle of steering wheel at different speeds

圖25 不同車速下車輛的路徑跟蹤偏差Fig.25 Vehicle path tracking deviation at different speeds
為了更加直觀地分析車輛的路徑跟蹤情況,將不同車速下路徑跟蹤偏差的相關指標統計如表7所示,可以看出,當車速低于 94 km/h 時,車輛的路徑跟蹤的峰值偏差能夠保持在 0.23 m 以內,說明該控制器能夠有效保證車輛的路徑跟蹤性能.

表7 不同車速下的車輛路徑跟蹤偏差指標對比Table 7 Comparison of route tracking deviation index at different vehicle speeds
3.2.2 人機共駕在線測試
在第3.2.1 節中對控制器單獨駕駛進行了驗證,可見控制器在單獨駕駛時能夠有效完成路徑跟蹤任務.接下來進行半實物的臺架實驗,分別采用羅技的實物駕駛單元、CarMaker 軟件、MATLAB 完成對雙環人機協同駕駛的實驗,進而討論人機協同駕駛下的車輛的道路跟蹤特性以及安全特性.另外還需要討論控制器加入人機協同控制是否能夠提高車輛的轉向精度、優化駕駛員的轉向操作、降低駕駛員的駕駛負擔.
基于以上目標,我們分別采集駕駛員A、駕駛員B、駕駛員C在人機協同控制中的轉向實驗數據.人機共駕測試示意圖如圖26 所示,車速設定為65 km/h,分別讓駕駛員A進行正常的轉向操作,駕駛員B進行過度轉向操作,駕駛員C進行欠轉向操作.然后分析不同駕駛員在不同轉向模式下的方向盤轉向角的變化以及車輛道路跟蹤的偏差情況.

圖26 人機共駕測試示意圖Fig.26 Man-machine co-driving test
如圖27 所示,當駕駛員A在正常轉向的情況下,駕駛員此時的轉向操作較為精準,當經過權重后的輸出轉向角與駕駛員產生的轉向角較為接近,可以得到,如圖28 所示,如果駕駛員在進行正常轉向的情況下且保證車輛的路徑跟蹤誤差在允許的范圍內,共享系統會增加駕駛員的駕駛權重.從而達到輔助駕駛員進行轉向操作的功能.如圖29 所示,駕駛員A在正常轉向的情況下,車輛的路徑跟蹤偏差維持在較小的水平,完全能夠滿足車輛通過的安全性.

圖27 駕駛員A 正常轉向下駕駛員轉角與權重后的輸出轉向角對比Fig.27 Contrast of driver's angle with output steering angle after weight under driver A's normal steering

圖28 駕駛員A 正常轉向下控制器權重的變化Fig.28 Variation of controller weight under driver A's normal steering

圖29 駕駛員A 正常轉向下車輛的路徑跟蹤偏差Fig.29 Vehicle path tracking deviation under driver A's normal steering
當駕駛員B在過度轉向的情況下,如圖30 所示,駕駛員輸出的轉向角明顯高于正常的轉向角水平,但是,駕駛員的轉向角經過權重后輸出的轉向角能夠保持在正常值的水平.如圖31 可見,當駕駛員進行過度轉向操作的情況下,控制器的控制權重會增加,對應的降低了駕駛員的控制權重,從而達到糾正駕駛員的功能.如圖32 所示,當駕駛員B在過度轉向的情況下,共享系統仍舊能夠將車輛的跟蹤路徑偏差維持在安全的范圍內.雖然駕駛員B比駕駛員A產生的轉向角誤差較大,但是此時控制器的控制權重提升,以此保證車輛的通過性.

圖30 駕駛員B 過度轉向下駕駛員轉角與權重后的輸出轉向角對比Fig.30 Contrast of driver's angle under driver B oversteering with output steering angle after weighting

圖31 駕駛員B 過度轉向下控制器權重的變化Fig.31 Variation of controller weight under driver B's oversteering

圖32 駕駛員B 過度轉向下車輛的路徑跟蹤偏差Fig.32 Vehicle path tracking deviation under driver B's oversteering
當駕駛員C在轉向不足的情況下,如圖33 所示,駕駛員輸出的轉向角明顯低于正常的轉向角水平,但是,駕駛員的轉向角經過權重后輸出的轉向角依舊能夠將保持在正常值的水平.此時同樣是增加了控制器的控制權重,從而補償駕駛員的轉向操作.如圖34 所示,當駕駛員C在轉向不足的情況下,共享系統能將車輛的跟蹤偏差維持在安全值的范圍內.可見,無論駕駛員是在過度轉向還是在轉向不足的情況下,共享系統都能保證車輛的路徑跟蹤要求.

圖33 駕駛員C 轉向不足時駕駛員轉角與權重后的輸出轉向角對比Fig.33 Contrast the driver's angle with weighted output steering angle when C is insufficient turning

圖34 駕駛員C 轉向不足時車輛的路徑跟蹤偏差Fig.34 Vehicle path tracking deviation when driver C steering is insufficient
最后,本文將討論共享駕駛相較駕駛員C單獨駕駛的差異.如圖35 所示,共享駕駛的情況下,駕駛員產生的轉向角小于單獨駕駛時駕駛員產生的轉向角.如圖36 所示,共享駕駛的情況下,駕駛員產生的輸出力矩小于單獨駕駛時駕駛員產生的力矩.為了進一步比較單獨駕駛與共享駕駛的差異,將相關數據制作成統計表如圖37 所示,給出了駕駛員C單獨駕駛和共享駕駛下的平均力矩、平均功率和總功率的統計直方圖,可以看出共享駕駛情況下比單獨駕駛的3 項指標都要小.說明共享駕駛能夠有效減輕駕駛員的駕駛負擔.圖38 和圖39 給出了駕駛員單獨駕駛的路徑跟蹤偏差和共享駕駛的路徑跟蹤偏差,其中最大偏差分別是 0.78 m 和 0.16 m,可見共享系統能夠極大地提升路徑跟蹤的精度.

圖35 駕駛員C 單獨駕駛與共享駕駛下轉向角對比Fig.35 Contrast of insufficient steering angle between driver C driving alone and shared driving

圖37 駕駛員C 單獨駕駛與共享駕駛下駕駛員各項指標對比Fig.37 Contrast of driver's index between driver C driving alone and shared driving

圖38 駕駛員C 單獨駕駛的路徑跟蹤偏差Fig.38 Vehicle path tracking deviation when driver C driving alone

圖39 駕駛員C 共享駕駛下的路徑跟蹤偏差Fig.39 Vehicle path tracking deviation under shared driving for driver C
由此可見,在駕駛員正常駕駛、過度轉向、轉向不足的不同駕駛模式下,共享系統都能提升駕駛路徑的精度、減小駕駛員的駕駛負荷.
為了進一步對比分析,表8 給出了4 種駕駛行為下的路徑跟蹤偏差的峰值誤差、和方差、均方差、均方根數據.可見,共享駕駛能夠有效減小車輛的道路跟蹤偏差,提升駕駛過程中的安全性,另外減輕了駕駛員的駕駛負擔.
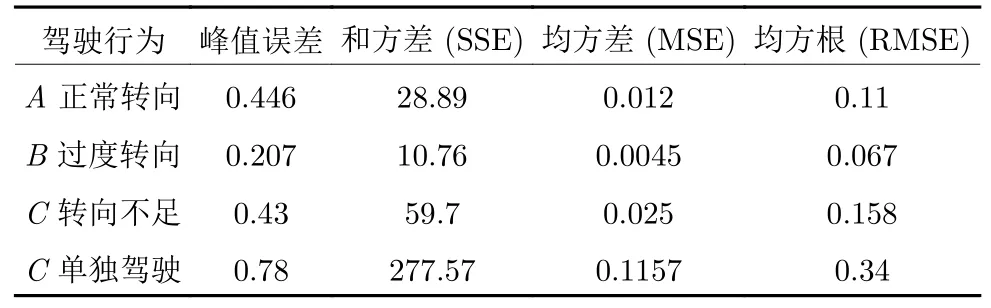
表8 不同駕駛模式下車輛的路徑跟蹤偏差指標對比Table 8 Comparison of vehicle path tracking deviation index under different driving mode
4 結束語
本文首先建立駕駛員轉向模型,然后通過遺傳算法辨識模型參數并分析其與車速和道路曲率之間的函數關系,最后在線驗證了共享控制系統的相關性能.
結果表明該系統不僅能夠更好地輔助駕駛員實現轉向操控行為,提升車輛的軌跡跟蹤精度和安全性,還能夠極大地減輕駕駛員負荷.但是仍存在一定的缺陷,比如,當車輛在高速狀態時,模型參數的辨識誤差較大.因此,需要對模型的結構和參數進行進一步的優化,同時也可以對遺傳算法進行優化.另外,本文的驗證與實驗中只采用了簡單的彎道路況,今后可以深入研究駕駛員轉向模型在復雜工況下的特點.在仿真實驗的環節,考慮城市路況,利用低速數據進行分析,同時討論路面附著系數的影響;另外需要考慮一些環境干擾較大的因素,例如風阻,道路顛簸等;同時可以設計鬼探頭極限工況;此外,共享控制系統也需要不斷優化,例如加入駕駛員狀態監測與意圖識別模塊來提高共享系統的性能.速度變化的模型參數辨識過程更符合實際情況,也值得進一步研究.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03