基于模糊控制理論的公路隧道照明主控制器設計研究
2022-08-01 02:35:20王政松
光源與照明 2022年3期
王政松
中鐵二十三局集團,四川 成都 610072
0 引言
隧道照明技術在我國的發展時間并不長,理論體系未創建完成,實踐經驗較匱乏。21 世紀之前,我國在公路隧道設計方面只是以《公路隧道設計規范》(JTJ 026—1990)標準為參照。進入21 世紀之后,推出了《公路隧道通風照明設計規范》(JTJ 026.1—1999)、《公路隧道照明設計細則》(JTG/T D70/2-01—2014)等標準。這些標準既是對工程實踐經驗的匯總[1],也是對最新科研成果的充分體現。標準內容借鑒了新的研究成果,借鑒了國外隧道照明的成功技術經驗,為我國公路隧道照明節能技術的發展指明了方向。在中國,自動控制在大隧道項目建設中發揮出重要作用,包括廈門海滄隧道、南山隧道等,雖然這種照明控制系統不能動態化采集照明設備運行中的數據信息,無法實現智能化控制,但并不影響隧道照明智能節能發展潛能的不斷挖掘[2]。
隧道節能技術雖有重大突破,但仍存在不少問題,如日光光纖光束采集技術穩定性不強,當前只是停留在施工階段,不具備投入實踐的條件。我國雖然已經著手開展太陽能光伏發電試驗,但要降低成本并確保在合理的距離內普及,仍有許多工作要做;無LED 電平調制的智能光控制技術尚未得到研究和實踐驗證。此外,科研人才存在較大缺口,基礎研究成果不夠豐富,建筑改造效果不佳等。這些都不利于隧道節能技術在我國的發展[3]。
基于此,為了提高隧道照明節能效果,文章一種隧道照明主控制器的設計方法,避免因隧道照明主控制器設計的不合理而造成能源的過度浪費,亦可節約隧道運營成本。
1 隧道照明的發展情況
1.1 LED 隧道照明
2008—2010 年,LED 隧道照明發展較快;2011—2013 年,進行了深入集成。2009 年,LED 白光的光效可達到100 lm/W,LED 無級調光技術被引入多個關鍵項目中,包括安徽前山隧道、廣東山隧道等,這些項目已經實施了工程論證,憑借著優異成績征服了項目管理者[4]。
通過相關數據了解到,把LED 燈具無級調制運用于車載參數、亮度、速度等方面,能以最低的能源獲得更高的效率[5]。經對比發現,以車流量和車速為控制參數,對洞內LED 燈具進行無級調光可實現最大節能效率,相比基于洞外亮度的分級控制方法可節能36.6%。
1.2 太陽能照明系統
2008 年,北京奧林匹克中心地下車庫安裝了19 根太陽能燈管。這是首次嘗試在地下空間運用太陽能照明系統,并取得了良好成效。3 年之后,陜西科技大學成立了課題研究小組,經過不懈努力推出了PV-LED直接照明系統,研發的太陽能輸送帶也引起了業內關注,為高速燕山隧道項目建設提供了技術支撐。河北承德市、漢國市、涼東小隧道先后投入使用全國最大的隧道太陽能光電照明系統,吉林省建成的汽車隧道運用了太陽能智能LED 系統,開創了國內先河。長安大學的研究者們運用先進技術對太陽能與風能進行彌補,在中短途隧道中以LED 復合體的形式為照明提供電力。
2 公路隧道照明控制模式分類
2.1 人工控制模式
人工控制向管理層提出了較高要求,要對天氣條件、交通量、車速等進行控制。一般而言,可以采用單回路與多回路兩種方式實施管理。人工控制需要投入較多的人力資源,控制流程煩瑣、需要考慮的內容較多,即使考慮得較為周全,也無法滿足當代交通發展所需,造成了資源浪費。實現節能的簡單電路會給道路安全帶來隱患。因此,這種人工控制模式逐漸淘汰,取而代之的是新型的控制模式。
2.2 自動控制模式
自動控制模式借助傳感器等檢測工具動態化采集數據,如隧道外部的交通、亮度信息等,采用電子控制設備在多樣化的隧道照明電路中進行靈活選擇,在不需要人工干預的前提下可以自動調光。雖然自動控制方法簡單,但僅限用于原有的調光電路,不能在整個隧道照明系統中進行動態調光。
2.3 智能控制模式
可以把智能控制技術應用于自動控制,如霧控制、神經網絡控制和專家系統。雖然智能控制仍在示范與探究階段,卻為隧道照明控制指明了下一階段的發展方向[6]。伴隨著大量技術成果的問世,其應用場景也會越來越多。
3 隧道照明主控制器的輸入量函數
3.1 模糊控制原理
天氣、車速、車流量等都會對隧道照明效果產生一定影響。要想發揮LED 無級調光的優越性,需要及時調整隧道內照明亮度。如果運用傳統方法,要圍繞隧道內照明亮度進行建模。由于環境參數復雜,而燈具也具有明顯的隨機性,隧道照明系統具有時變、非線性等特征,數學建模難度較高。模糊控制可以在不需要數學建模的前提下實施模糊化處理,由此解決了建模難題,為隧道照明控制算法研究帶來了有效幫助。
3.2 隧道照明主控制器輸入量函數
由于公路隧道照明的主要調光依據是入口段照明,參照入口段照明計算過渡段照明。故而,只需要分析隧道入口段照明控制方法。入口段照明會受諸多因素的影響,把車速、車流量、隧道外亮度確定為隧道照明主控制器輸入量,與之相應的語言集分別為V、Q、L。
以2014 版《公路隧道照明設計細則》(JTG/T D70/2-01—2014)為準,與多名專家進行磋商,將L的真實論域與離散論域設定為[0,6 500]、[-4,-3,-2,-1,0,1,2,3,4]。洞外亮度隸屬度函數如圖1 所示。

圖1 洞外亮度隸屬度函數
在設計細則中,把Q設定為不同標準,分別為每小時180 輛、350 輛、650 輛、1 200 輛,真實論域與離散論域分別設定為[0,Qmax]、[-4,-3,-2,-1,0,1,2,3,4]。車流量隸屬度函數如圖2 所示。
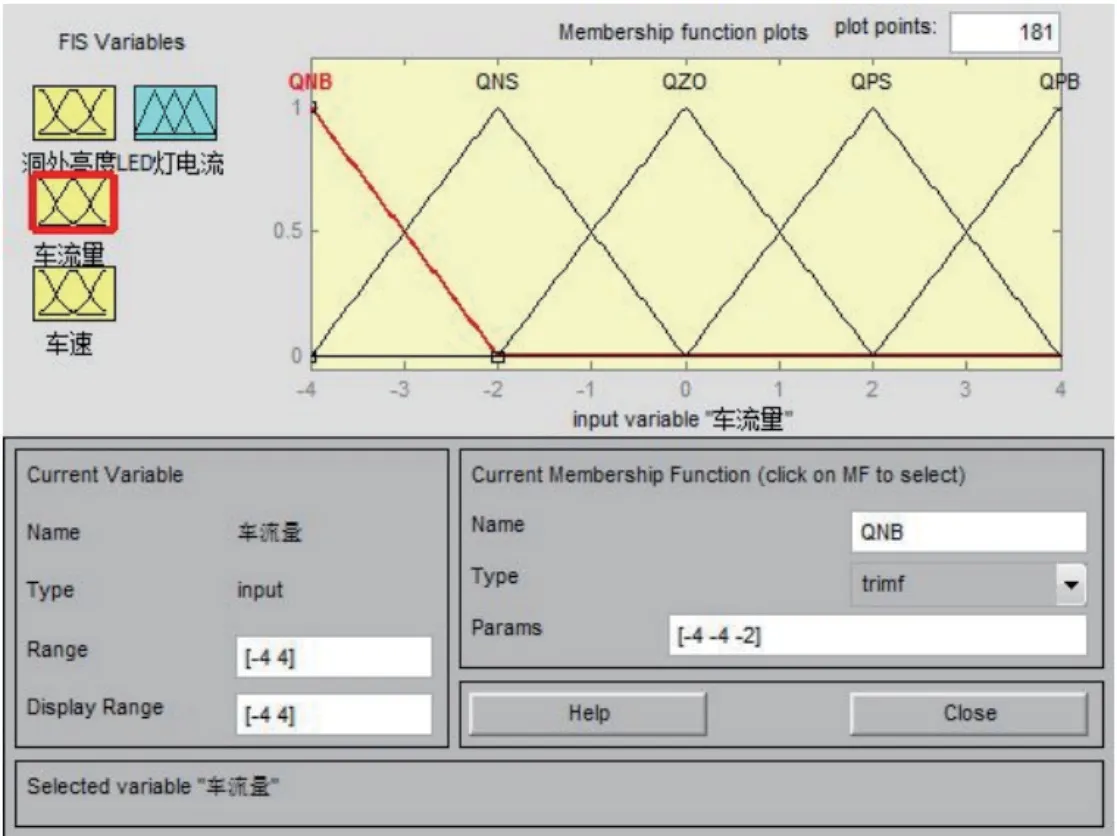
圖2 車流量隸屬度函數
設LED 燈具輸出量電流的真實論域為[minI,maxI],取離散論域[-4,-3,-2,-1,0,1,2,3,4]。該變量模糊化如表1 所示。輸出LED 燈具電流隸屬度函數如圖3所示。
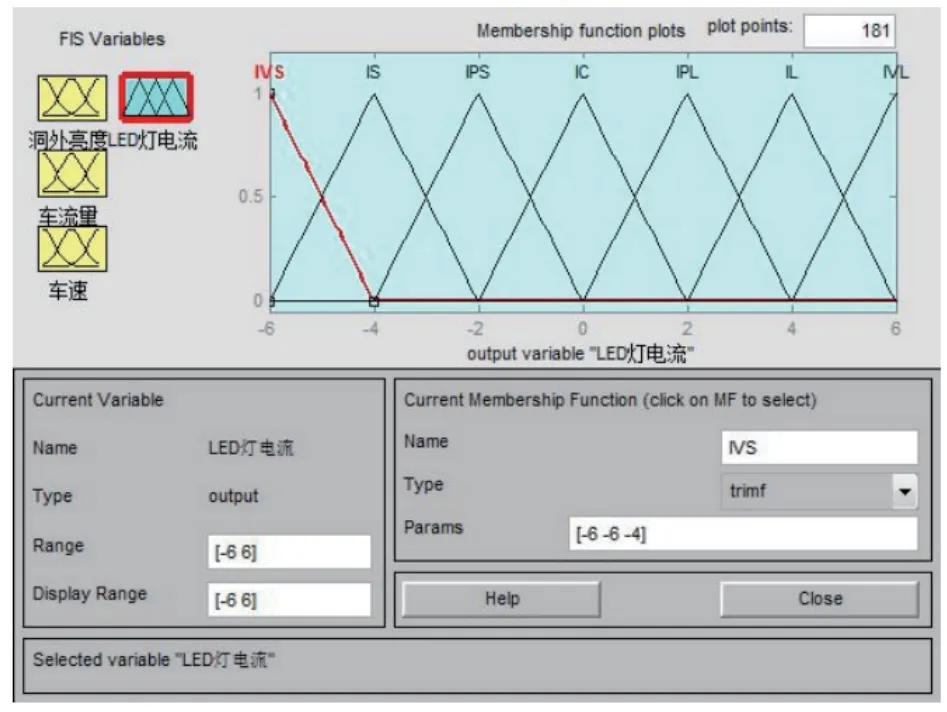
圖3 輸出LED 燈具電流隸屬度函數
4 隧道照明主控制器硬件組成與設計
4.1 隧道照明主控制器硬件組成
智能隧道照明控制器主要包括接口、主控模塊等,系統結構框圖如圖4 所示。
4.2 輸入量采集設備選擇
車速、車流量、隧道外亮度設定為公路隧道照明主控制器輸入量,通過線圈車輛檢測器與隧道洞外亮度檢測器采集數據。線圈車輛檢測器的環形繞組埋在道路下方。通過檢測車輛在繞組磁場中的干擾,可以精準計算獲得速度與車流量信息。這種方法成本低廉、易于掌握、技術成熟。車輛檢測器選用中央信息技術控制有限公司設計的車輛檢測器。
4.3 數據遠程傳輸設備選擇
在無線傳輸下,由主控制器將隧道照明狀態數據傳輸到遠程監控中心,由此實現實時化監控和及時顯示。選擇無線通信模塊data-6121,這一模塊可以通過手機與短信傳輸遠程數據,且功耗較低。
5 隧道照明主控制器軟件程序流程設計
智能隧道照明控制器軟件設計流程如圖5 所示。首先對所有模塊進行初始化處理,然后讀取隧道外的亮度和交通信息。當系統處于非人工操作狀態時,系統將檢查隧道條件是否正常。如果出現異常,需要及時發出警報,指明出現錯誤的程序,中止總線通信。當故障排除、隧道條件恢復正常之后,系統自動對總線通信進行檢測。如果處于正常狀態下,主智能控制程序將被啟動,把無級調光命令發送給所有子控制程序,在第一時間向上位監控計算機發送調光管理狀態信息。調控控制結束后,系統按預設時間延遲并再次開始上述循環。
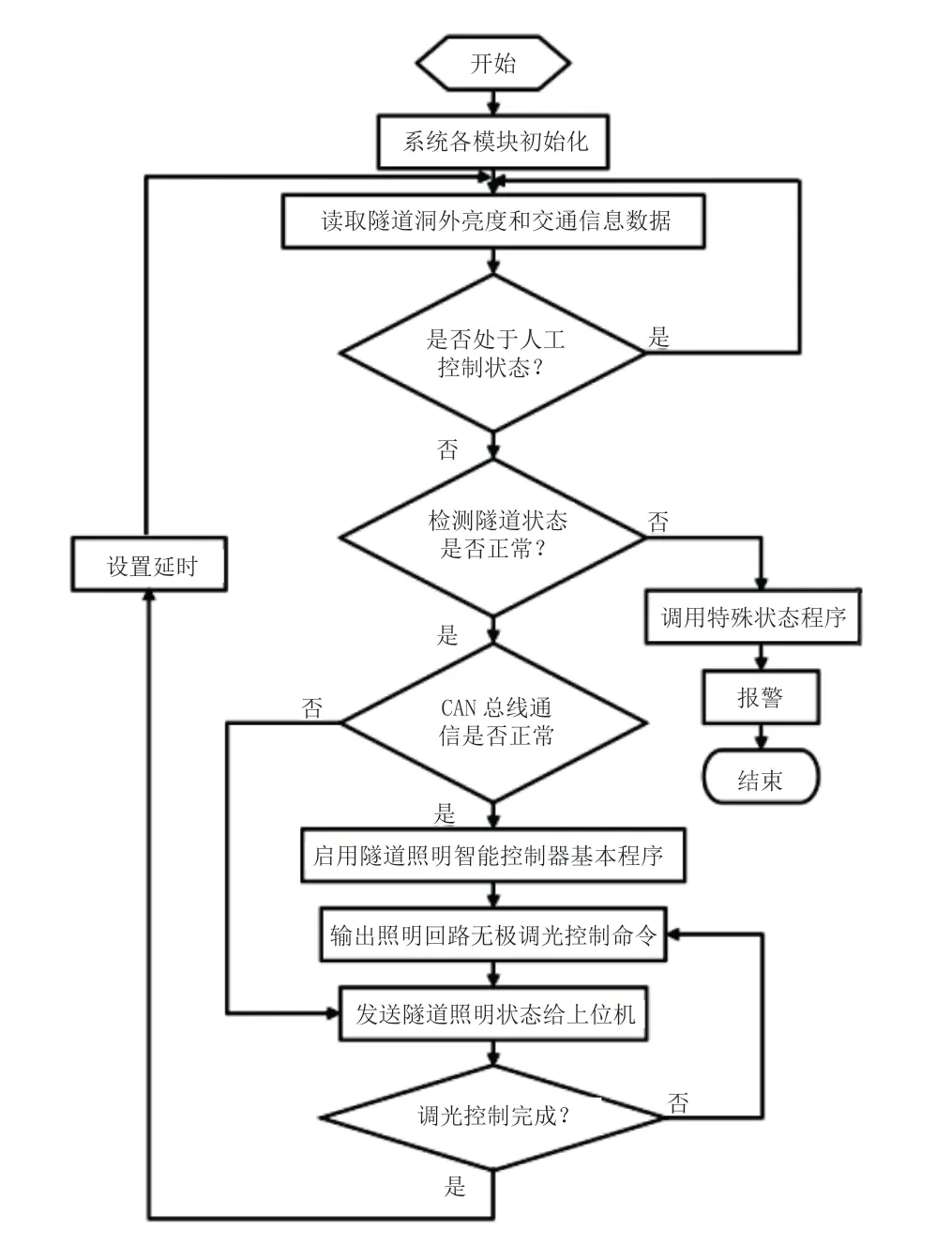
圖5 軟件程序流程圖
6 結論
文章以隧道照明設計需求為導向,先分析隧道照明節控制類型,以天氣、車速、車流量為輸入數據,如選擇相關的采集設備,然后為系統選擇遠程數據傳輸設備,可以起到遠程監控的良好作用。文章為隧道照明系統設計主控制器,并對硬件與軟件進行了設計。該主控制器可以依據輸入數據完成調光控制,具有良好的節能效果,有一定的推廣價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32