無人機自主著艦技術研究
2022-08-01 04:21:58畢衛紅高佳玥
燕山大學學報 2022年4期
關鍵詞:檢測
劉 豐,于 洋,郭 璇,*,畢衛紅,高佳玥
(1. 燕山大學 信息科學與工程學院,河北 秦皇島 066004; 2. 河北省特種光纖與光纖傳感重點實驗室,河北 秦皇島 066004)
0 引言
隨著我國海洋強國戰略的推進實施,構建遙感衛星、無人機、無人艇、海面站、岸基站一體的海洋立體生態監控網絡體系是推進我國海洋生態文明建設、保護海洋環境所急需的關鍵技術。特別是隨著我國無人機技術的迅速發展,基于無人機的近岸海域綠潮、赤潮等生態災害的實時監測技術已經成為海洋科學領域的研究熱點。在海洋災害監測中可用的無人機系統資源越來越豐富,搭載的專用設備的性能和系統智能化程度也在不斷提高[1]。無人機監測作為傳統監測手段的重要補充,在災情監測中表現出了效率高、行動迅速、監測細致等優勢[2-3]。
然而,目前無人機受限于持續續航能力不足,導致岸基起飛覆蓋監測面積受限,限制了無人機在海洋環境監測領域的深度應用。開展無人機自主著艦技術的研究是拓展基于無人機的海洋藻類災害監測范圍、保障無人機飛行安全、甚至實現無人機著艦電力自動補充的核心技術之一。GPS導航是目前最為廣泛使用的無人機定位技術[4],然而在GPS導航系統精確度不高的情況下,現有的慣性導航系統在誤差補償時不能提供足夠精確的位置信息,難以勝任自主著陸的要求,所以要另外尋求其他的有效手段[5]。
在無人機自主著陸技術領域,針對靜態著陸點降落已有較為完善方案,技術也趨于成熟。文獻[6]和[7]設計了一套輔助無人機自動著陸的機器視覺系統,對水平地面上的著陸點進行檢測。而對于隨海面波動實時變化的無人艇著陸平臺來說,平穩安全著陸依舊是個未得到良好解決的難題。文獻[8]通過采用地面人工標識April Tag與無人機的視覺引導跟蹤算法相結合的方案,實現無人機的懸停和在移動平臺上的著陸,但對于起伏不定的無人艇,無法保證能夠安全著陸。文獻[9]針對無人機在垂直升降平臺上的自主著陸問題,設計了由運動估計模塊、軌跡生成模塊和跟蹤模塊組成的控制結構,但對于存在傾角的著陸面未進行實驗分析。
本文針對無人機自主著艦技術的實際工程需求,提出了基于機載攝像頭與艇載慣性導航裝置相結合的自主降落方案。通過對降落標志的識別,結合無人艇傳回的姿態數據,對著艦的最佳時機進行判定,以實現無人機的安全著艦。經過理論建模分析和實驗研究表明本方案能夠實現無人機在無人艇上的自主安全降落,研究結果能夠為無人機自主在無人艇上可靠著陸提供理論支撐,并具有很好的實際工程應用價值。
1 無人機自主著艦控制方案
本文研究的四旋翼無人機自主著艦系統流程如圖1所示。
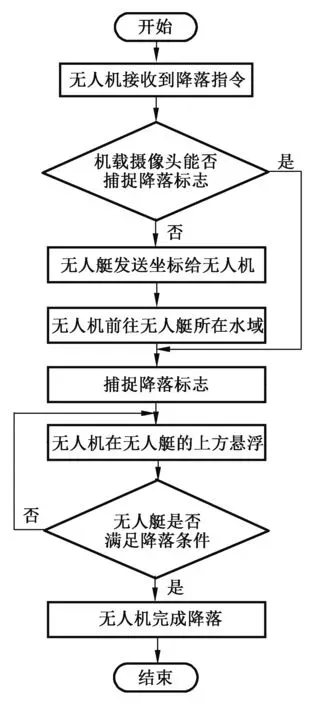
圖1 無人機自主著艦策略Fig. 1 Autonomous landing strategy of UAV
在無人機的著艦過程中,通過能否捕獲降落標志來判斷無人機與無人艇是否在同一水域。若不在同一水域,無人機通過GPS導航向無人艇方向進行移動。
因為無人艇隨海浪的波動會進行無規則的運動,導致無人機無法直接在無人艇上進行降落。影響無人機降落的兩個主要參數是滾轉角和俯仰角[10]。為了降低無人機視頻圖像識別處理的難度,本方案通過在無人艇上搭載慣性導航單元來獲取實時滾轉角和俯仰角信息,并通過短距無線通信系統實時傳輸到無人機控制系統,當無人艇的姿態滿足無人機降落條件時進行著陸操作,否則在當前位置進行懸停,重新尋找下一次降落的最佳時機。
1.1 降落平面檢測系統
本文所設計的降落平面檢測系統包括兩部分如圖2所示,安裝于降落平面上的為測量發送設備,以MPU6050為核心,實時檢測平面的姿態信息,并利用無線傳輸模塊,將姿態信息發送出去。安裝于四旋翼無人機上的為決策接收設備,接收到測量設備傳回來的姿態信息,對此時降落平面的姿態進行安全性判定。降落平面檢測裝置如圖3所示。
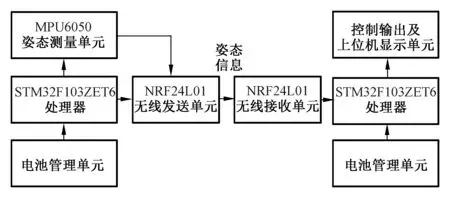
圖2 降落平面檢測系統圖Fig. 2 Landing plane detection system

圖3 降落平面檢測裝置Fig. 3 Landing plane detection device
1.2 降落標志
無人機降落時,主要依靠機載攝像頭捕捉無人艇甲板上的降落標識,因此一個特征突出并容易識別的降落標志尤為重要。在本文中,設計的專用降落標志如圖4所示。標志主體由一個圓環和一個內接正三角形構成。此三角形分為兩部分,由頂點向下作垂線,左側為白色右側為黑色,中間的垂線便于無人機與無人艇之間朝向校準。

圖4 降落標志Fig. 4 Landing sign
1.3 捕獲圖像的預處理
運動中的無人機在通過機載攝像頭捕獲圖像時,會受到諸如光子噪聲和暗電流噪聲等因素的干擾,導致圖像中噪聲信息的引入,因此需要在盡量保持圖像細節特征的前提下,對圖像的噪點進行抑制即圖像濾波[11]。常用的圖像濾波方式有線性濾波和非線性濾波,但對于圖像中存在有效像素值為0噪聲像素值為255的情況下,線性濾波只能將噪聲處理為更柔和的形式,而非線性濾波可以通過邏輯判斷將該噪聲過濾掉[12]。
非線性濾波中常用的濾波方式包括中值濾波和雙邊濾波,二者相比較,中值濾波會使圖像的邊緣信息變弱甚至消失,而為了對所設計的降落標志進行識別,需要對圖像的邊緣進行精準的把握,因此本文選擇了不僅能將圖像中所帶有的噪聲濾除掉,同時也不會變動圖像中有效信息的雙邊濾波算法。雙邊濾波可以使頻率較高的信號變得平滑,還會使變化較大的信號維持原樣,實現對邊緣的平滑處理。雙邊濾波器表達式為
式中,g(i,j)為被卷積的像素點(i,j)的像素強度,f(k,l)為鄰域像素點(k,l)的像素強度,ω(i,j,k,l)為加權系數,其等于值域濾波器d(i,j,k,l)與空域濾波器r(i,j,k,l)的乘積。空域濾波器與值域濾波器的表達式分別為

式中,σd與σr為平滑參數,f(i,j)與f(k,l)分別為鄰域像素點(i,j)和(k,l)的像素強度。
采用上述方法對降落標志圖像進行預處理得到的輪廓清晰的二值化圖像如圖5(b)所示。
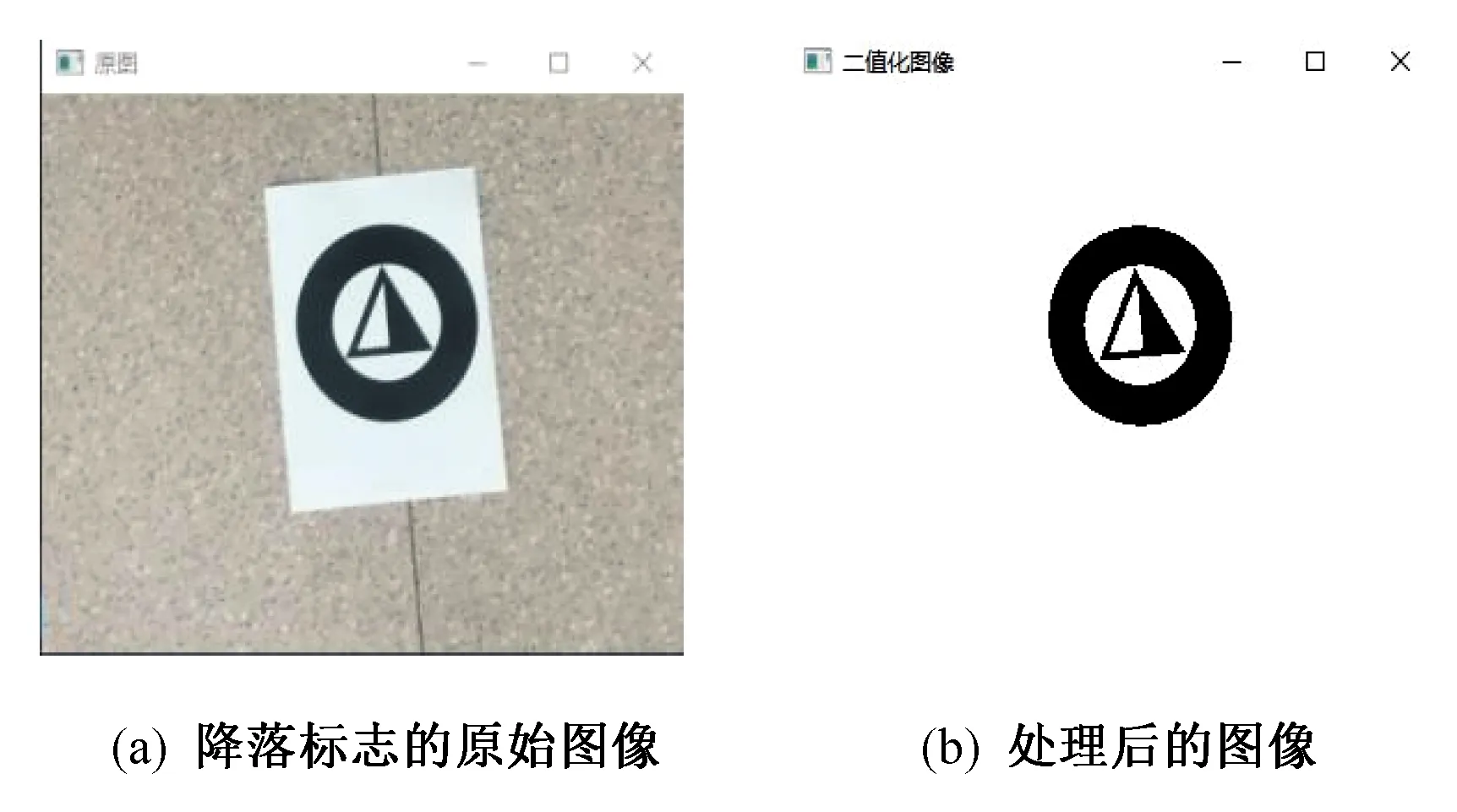
圖5 捕獲的圖像與二值化后的圖像Fig. 5 Captured image and binarized image
仿真研究和實際測試效果表明:采用雙邊濾波法進行圖像預處理時,主要涉及的參數包括每個像素鄰域的直徑、顏色空間濾波器的標準差值和空間坐標濾波器的標準差值。綜合考慮運行速率與處理效果,濾波器的具體參數選擇見表1。
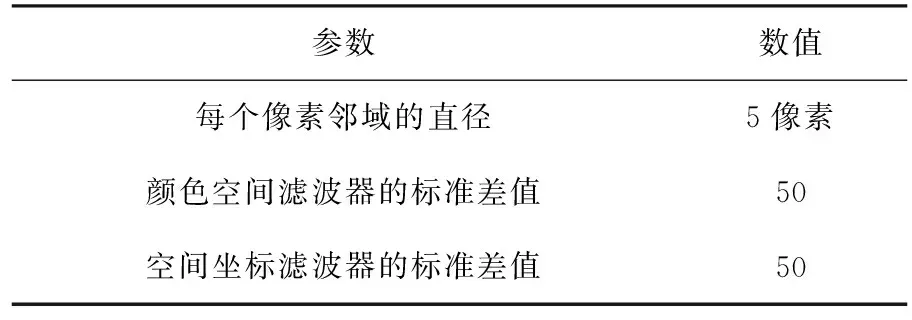
表1 雙邊濾波參數Tab.1 Bilateral filtering parameters
1.4 捕獲階段1——圓環檢測
OpenCV提供了圓形檢測算法,最常使用的是霍夫變換[13-14],通過在兩個空間坐標系間對像素進行變換,可以令在初始空間坐標系包含同樣性質的曲線變換到另一個空間坐標系中并且數值增大到峰值,如此便可以將檢測邊緣形狀問題轉變成峰值捕獲過程。在檢測圓形過程中,將圖像空間xy直角坐標系中的像素映射到參數空間中,并在參數空間中搜索交點是否存在,圓形的數學表達式為
式中,(a,b)為圓心坐標,θ為半徑與x軸的夾角。在OpenCV中提供了HoughCircles函數用來檢測灰度圖像中是否包含有圓形,在此需要合理設置兩圓心距離的最小值。若最小值太小,除了捕獲到需要的圓形外還會檢測到其余臨近的圓形,給圖像識別帶來干擾;若最小值太大,則有可能會對圖像處理不完全,有所漏失,經過仿真和實驗研究,本文選取的各參數取值見表2。
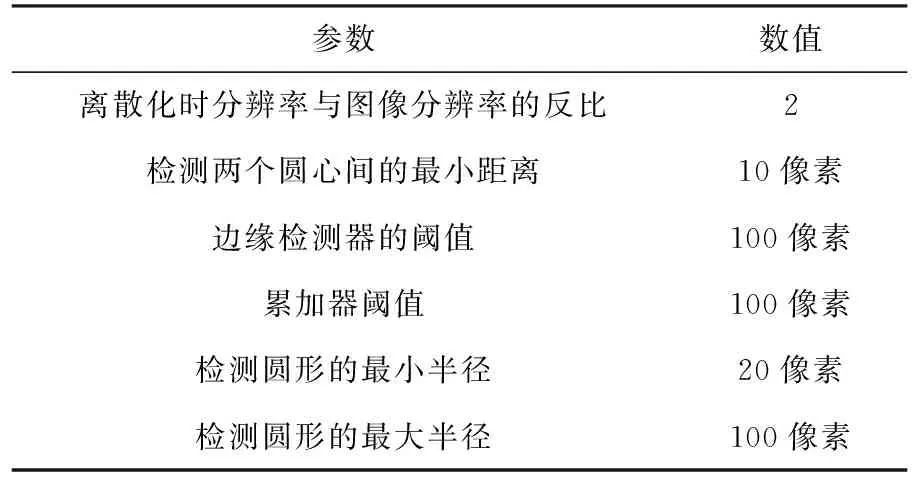
表2 HoughCircles函數參數Tab.2 HoughCircles function parameters
對原圖像進行圓形捕獲,并將捕獲結果顯示在原圖像上,如圖6(b)所示。

圖6 原圖像與圓形捕獲Fig. 6 Original image and circular capture
1.5 捕獲階段2——三角形檢測
當無人機降落至距無人艇甲板50 cm左右時,由于高度過低,會存在無法完全捕獲圓環的可能,因此轉為對內部小三角形的識別,并通過三角形內部的垂線,來判斷無人艇的朝向,使無人機與無人艇進行朝向校準。對三角形捕獲仿真如圖7(b)所示。
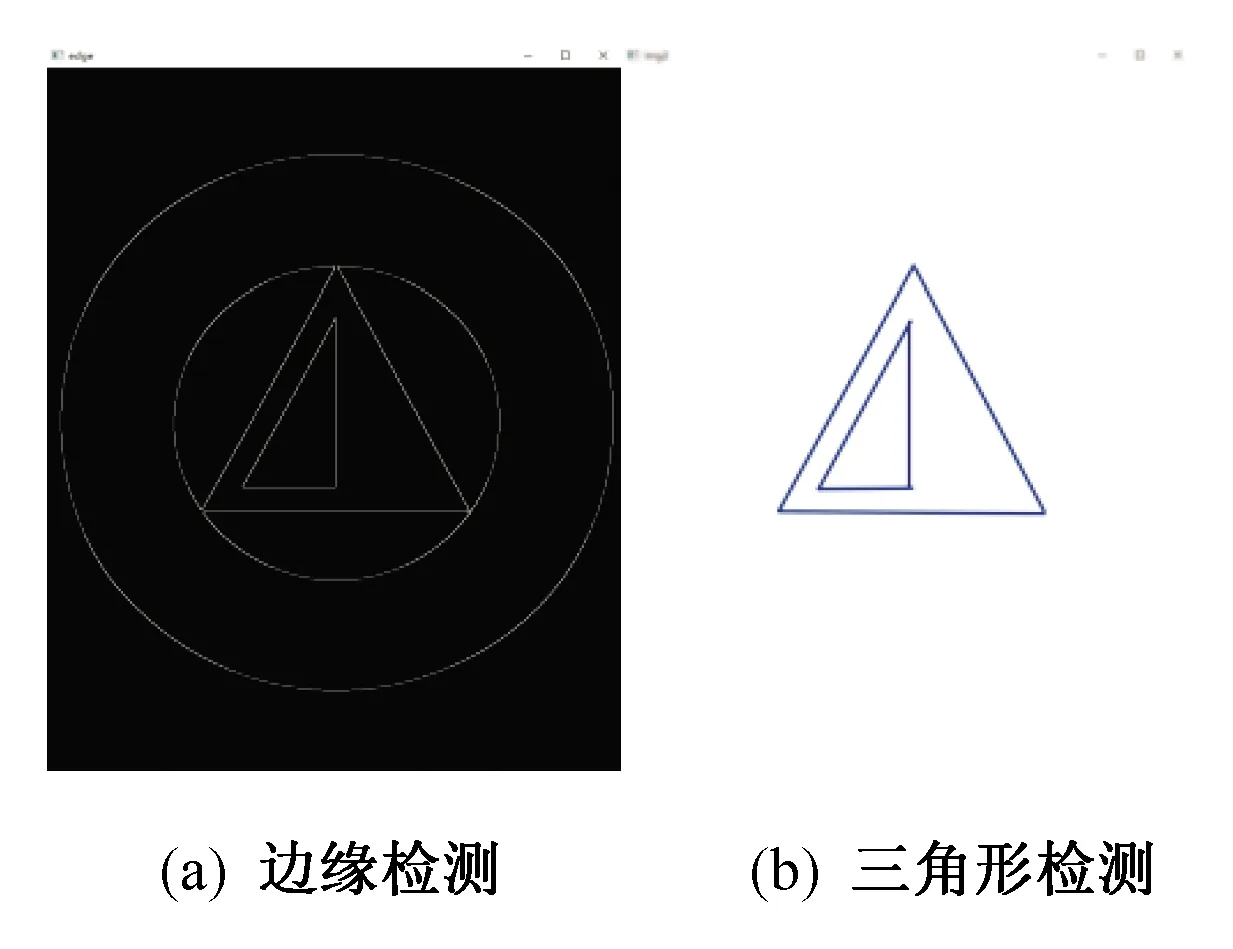
圖7 邊緣檢測與三角形捕獲Fig. 7 Edge detection and triangle capture
1.6 坐標空間的轉換
在無人機自主降落的整個系統中,涉及4種不同坐標空間的轉換,分別是世界坐標系、機體坐標系(相機坐標系)、圖像坐標系和像素坐標系。世界坐標系OwXwYwZw以目標物體為原點,建立規則符合右手坐標系,通過世界坐標系對無人機位置進行定位。由于機載攝像頭固定在無人機中心處,可以將機體坐標系與相機坐標系看作是同一個坐標空間。相機坐標系的原點Oc為相機鏡頭的光心,OcZc軸與相機的光軸重合,OcXc軸平行成像平面并指向右側,OcYc軸垂直OcXcZc屏幕并指向下方。像素坐標系OpXpYp主要是用來定義相機所捕獲圖像中每個像素位置之間的關系,它的原點為圖像左上方的頂點,OpXp軸和OpYp軸分別與圖像坐標系中OiXi軸和OiYi軸方向一致。與像素坐標系相對應的圖像坐標系主要是用來定義圖像的真實長度,光軸在感光片上對應點為原點Oi,OiXi平行向右,OiYi與OiXi垂直并指向下方。圖像坐標系與像素坐標系具體如圖8所示。
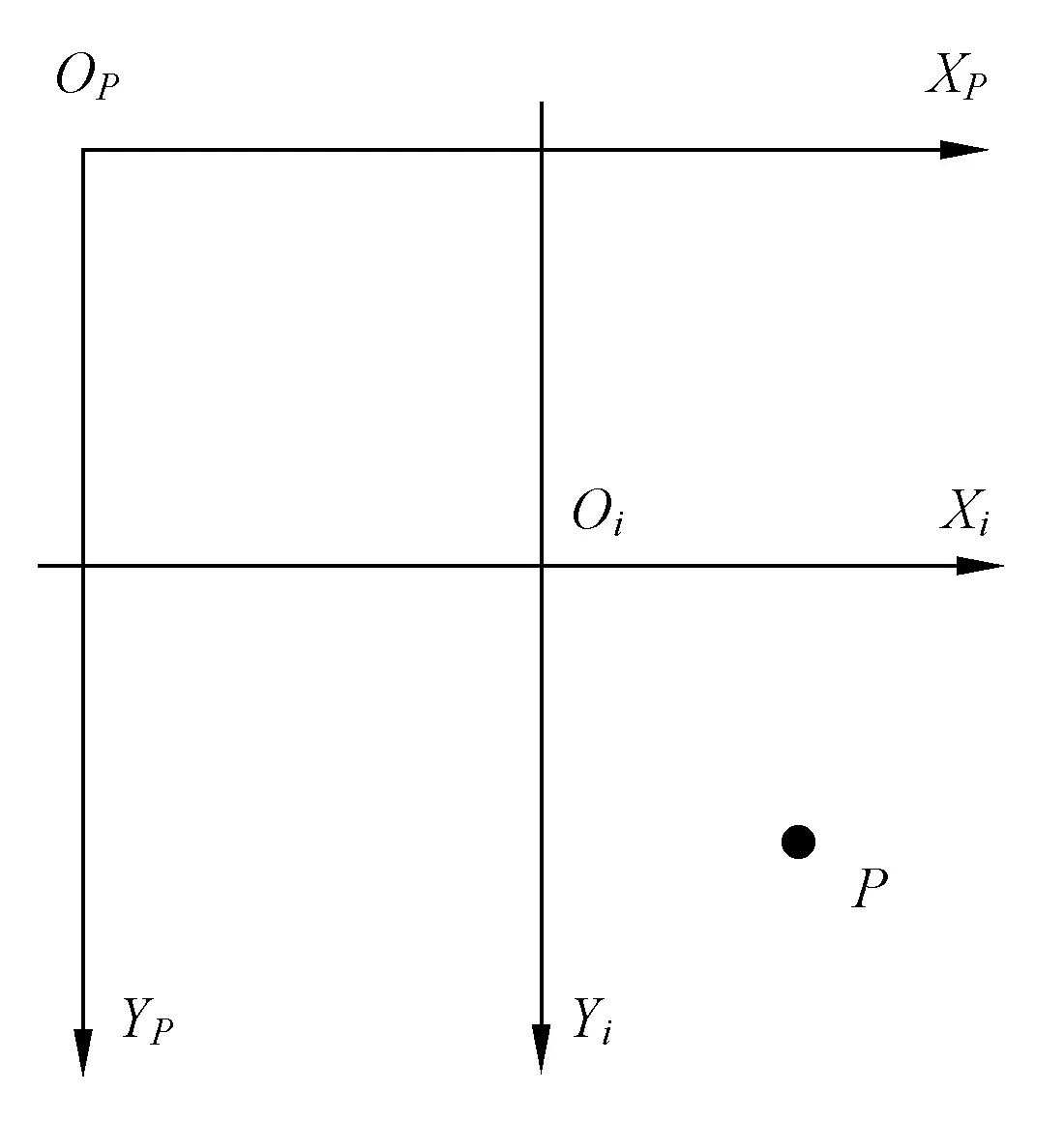
圖8 圖像坐標系與像素坐標系Fig. 8 Image coordinate system and pixel coordinate system
圖片中的點P,在圖像坐標系中坐標為P(xi,yi),在像素坐標系中坐標為P(xp,yp),兩者之間的關系為
(1)
式中,xi0和yi0為圖像坐標系原點在像素坐標系中的位置,通常取值為圖像長度的一半,dxp與dyp分別表示一個像素的物理寬度和高度。
空間中一三維點P(xc,yc,zc)在圖像坐標空間中投影點為P′(x′,y′)如圖9所示,為便于分析計算,作圖像平面關于光心的對稱平面,三維點在此平面投影點為P(x,y),如此便可以得到三維空間的點與圖像中的點之間的轉換關系為
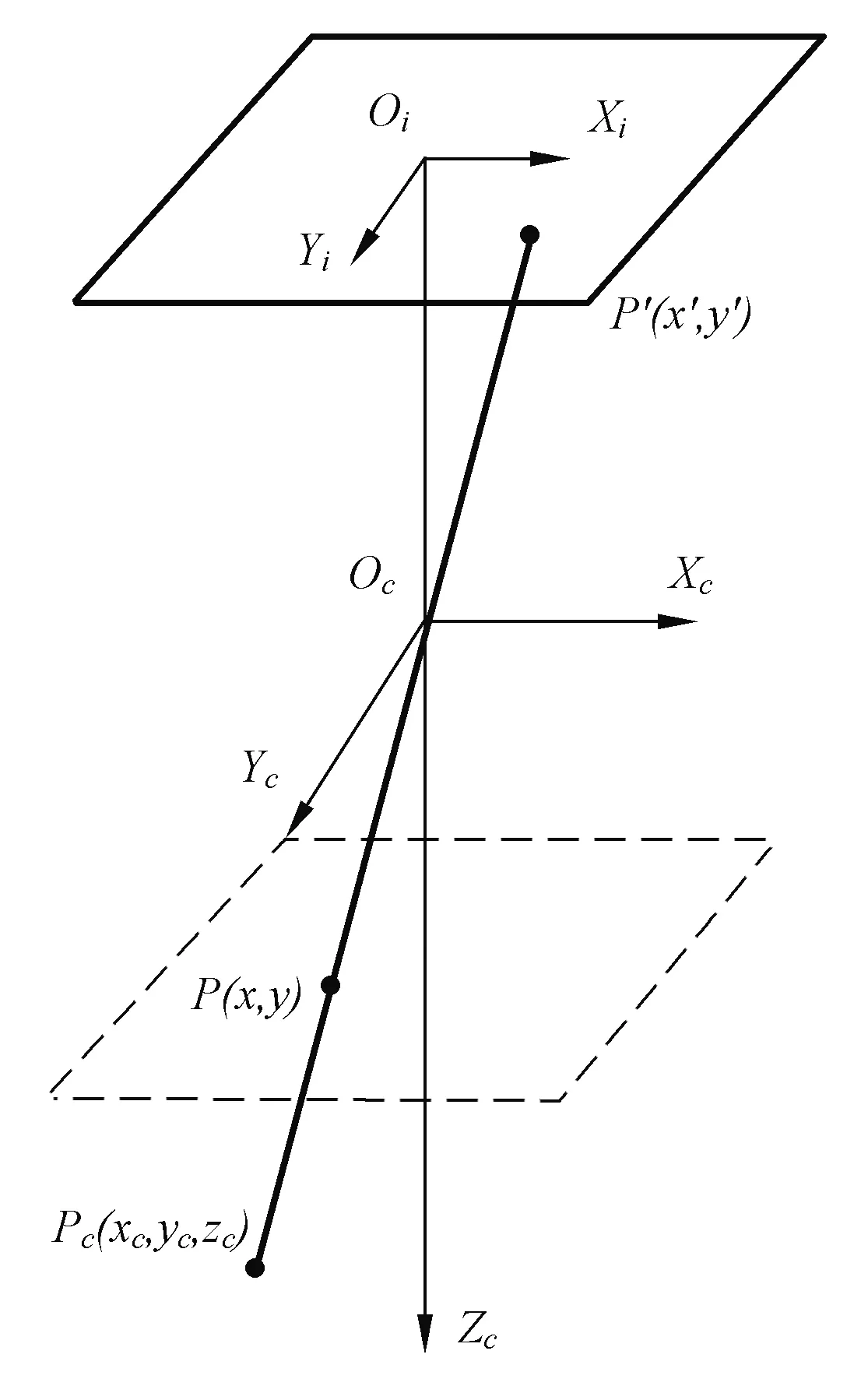
圖9 點到圖像坐標系的映射Fig. 9 Mapping of points to image coordinate systems
(2)
式中,f為焦距,即圖像平面到光心的距離。將式(2)代入式(1)并轉化為矩陣形式可以得到
式中,K為攝像頭的內參矩陣,通過內參矩陣可以將相機坐標系下任意的三維坐標映射到像素坐標系中,構建空間點與像素點之間的映射關系。
2 四旋翼飛行器數學模型
依據四旋翼飛行器飛行控制的特點,建立了姿態與位置的數學模型,并利用Simulink工具對四旋翼飛行器模型進行模擬,在建模過程中所需要的四旋翼飛行器的參數見表3。
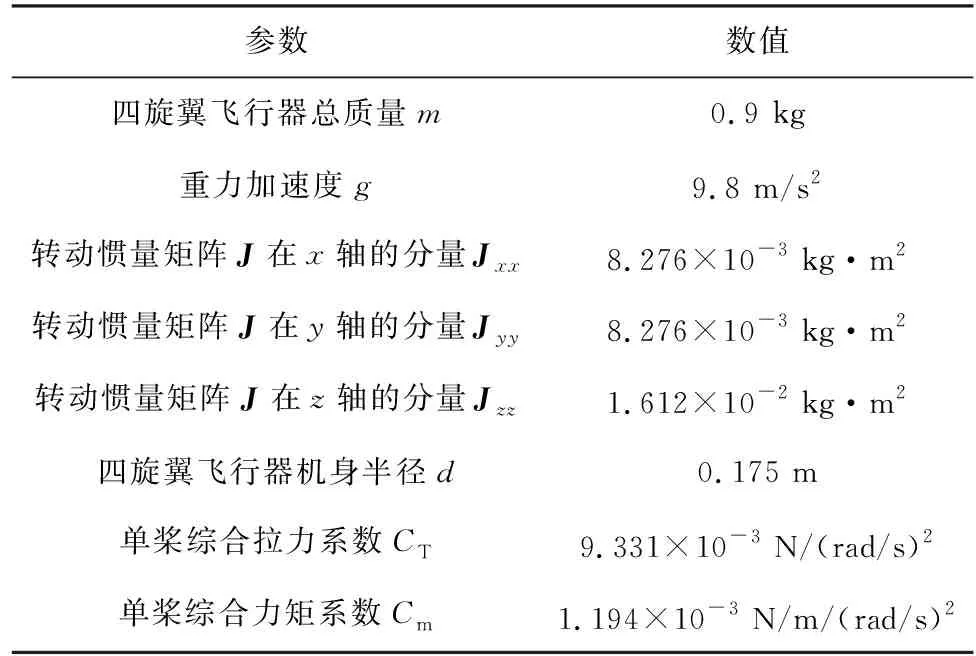
表3 四旋翼飛行器參數表Tab.3 Quadcopter parameter
2.1 姿態模型
以“十”字形四旋翼飛行器為例,為不失一般性,假設四旋翼飛行器為均勻對稱的剛體[15],如圖10所示。
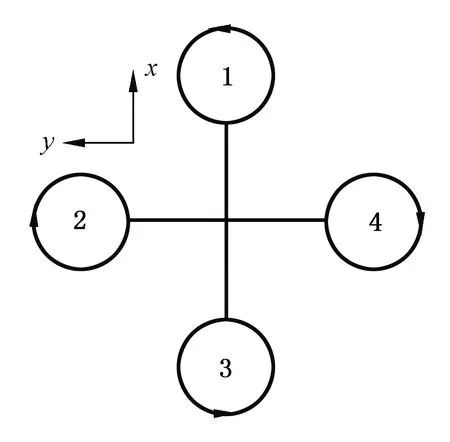
圖10 十字形四旋翼飛行器Fig. 10 Cross-shaped quadcopter
對其進行動力學分析,已知力矩計算公式為
M=L×F,
式中,L是轉動軸到受力點的距離,F是作用于物體上的矢量力。對于x軸來說,力矩由電機2與電機4產生,電機2產生正向力矩,電機4產生負向力矩,同理對于y軸來說,力矩由電機1與電機3產生,電機3產生正向力矩,電機1產生負向力矩。根據x軸與y軸的方向可知,z軸垂直紙面向上,因此對于z軸,電機2與電機4產生正向力矩,電機1與電機3產生負向力矩。可得到各軸上的力矩為
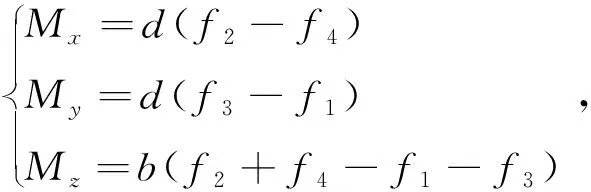
(3)
式中,d為無人機中心到旋翼的距離,b為系數,f1、f2、f3、f4分別為四個電機產生的力,其力的大小為
式中,CT為升力系數,ωi為電機轉速,i=1,2,3,4。由式(3)可以得到四旋翼飛行器的合力矩為
M=Jε+w×Jw
(4)
式中,J為慣量矩陣,ε為角加速度,w為角速度,具體表達式為

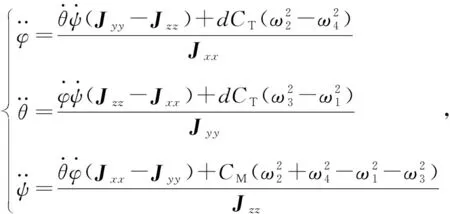
(5)
由此即可建立出角加速度與角速度和電機速度的數學模型。
2.2 位移模型
在位移模型建立過程中,需要涉及兩個坐標系,分別是地面坐標系和機體坐標系,機體坐標系轉為地面坐標系的轉換矩陣為Rbg,
每個電機在機體坐標系下都會產生一個向上的升力fi,同時四旋翼飛行器也會受到自身垂直向下的重力的作用,受到的合力為
式中,ax、ay和az分別為四旋翼飛行器在各坐標軸上的加速度,將之轉換到地面坐標系
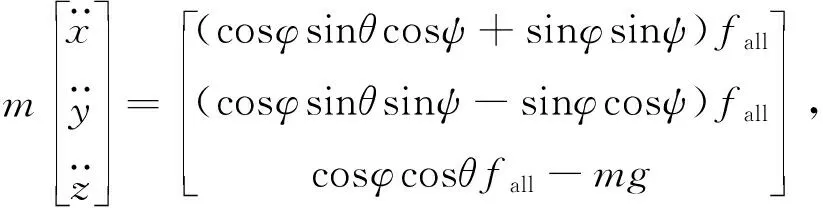
(4)
式中,fall=f1+f2+f3+f4。
2.3 控制模型
在四旋翼飛行器的控制系統中,采用PD控制,外環為位置控制,對式(5)進行變換,可得
式中,Ux、Uy和Uz分別為x、y和z軸的虛擬控制量。四旋翼飛行器的內環為姿態控制,由式(5)可知,φ受到電機2與電機4的影響,θ受到電機3與電機1的影響,可以得到電機轉速與控制量之間的關系式
式中,U1為位置控制量,U2、U3和U4為姿態控制量,通過轉換矩陣將控制量轉換為電機轉速,實現對四旋翼飛行器的控制。
2.4 仿真結果
本次Simulink仿真設計了4個任務目標點,四旋翼無人機由原點(0,0,0)起飛,依次飛向目標點(0,0,5),(5,0,5),(5,5,5),(0,5,5),最后垂直降落,仿真結果如圖11所示。可以看出此模型可以有效幫助四旋翼飛行器追蹤目標地點。
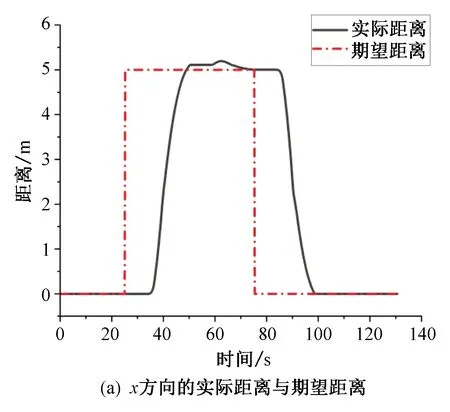
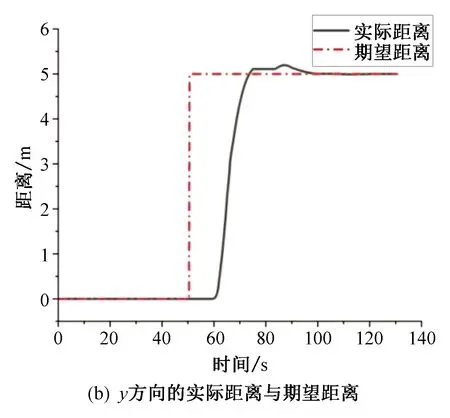
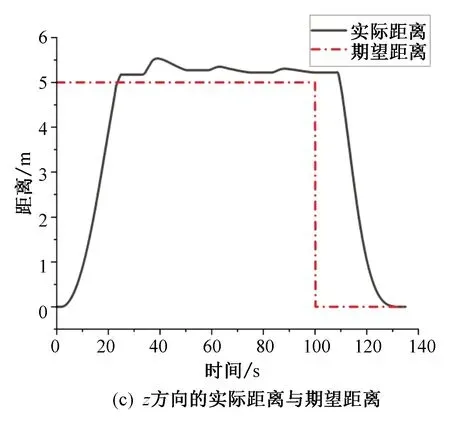
圖11 實際距離與期望距離Fig. 11 Actual distance and expected distance
3 降落測試實驗
四旋翼飛行器能否平穩降落在無人艇甲板上,主要需要考慮的因素包括兩點,分別是四旋翼飛行器與甲板之間的摩擦力以及甲板的傾角。而甲板的傾角包括俯仰角θ與滾轉角Φ,四旋翼飛行器分別在降落平面俯仰角θ與滾轉角Φ的作用下產生沿斜面向下的分力為
Fθ=mgsinθ,
FΦ=mgsinΦ,
結合兩個分力,可以得到無人機沿斜面向下的合力為

(6)
四旋翼飛行器與降落平面之間的最大摩擦力為
fmax=mgμsinα,
(7)
式中,μ為摩擦力系數,α為降落平面與水平面之間夾角的極限值。根據式(6)和(7),使四旋翼飛行器能夠安全著陸,沿斜面向下的合力要小于最大靜摩擦力,因此降落平面的俯仰角θ與滾轉角Φ要滿足
sin2θ+sin2Φ≤μ2sin2α,
為確定最大靜摩擦力即確定四旋翼飛行與降落平面間最大夾角,進行了十次實驗如圖12所示,確定在本文所設計的系統方案中安全降落的傾角閾值,具體實驗數據見表4。
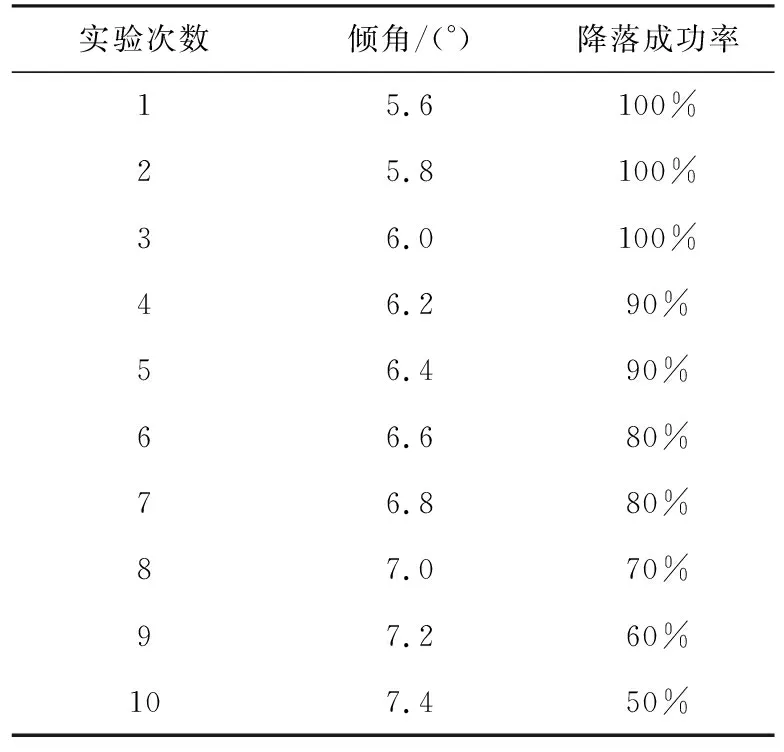
表4 降落平臺傾角測試Tab.4 Landing platform inclination test
無人機降落傾角測試實驗如圖12所示。當降落平面與水平面夾角處于6°之間時 ,無人機可以安全著陸于目標甲板上,超過此角度則不能確保無人機著陸的安全性與穩定性。
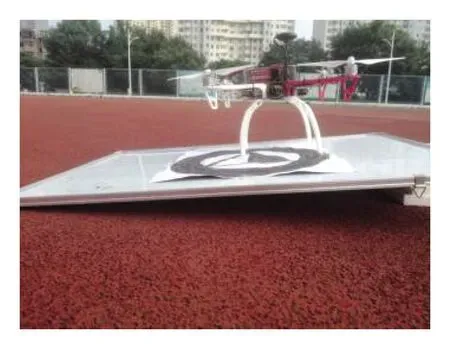
圖12 平臺傾角測試實驗Fig. 12 Platform inclination test experiment
根據上述對降落平面俯仰角與橫滾角的綜合分析,設計了降落平面傾角監測上位機,可以實時監測傾角狀態并進行降落判定,如圖13所示。
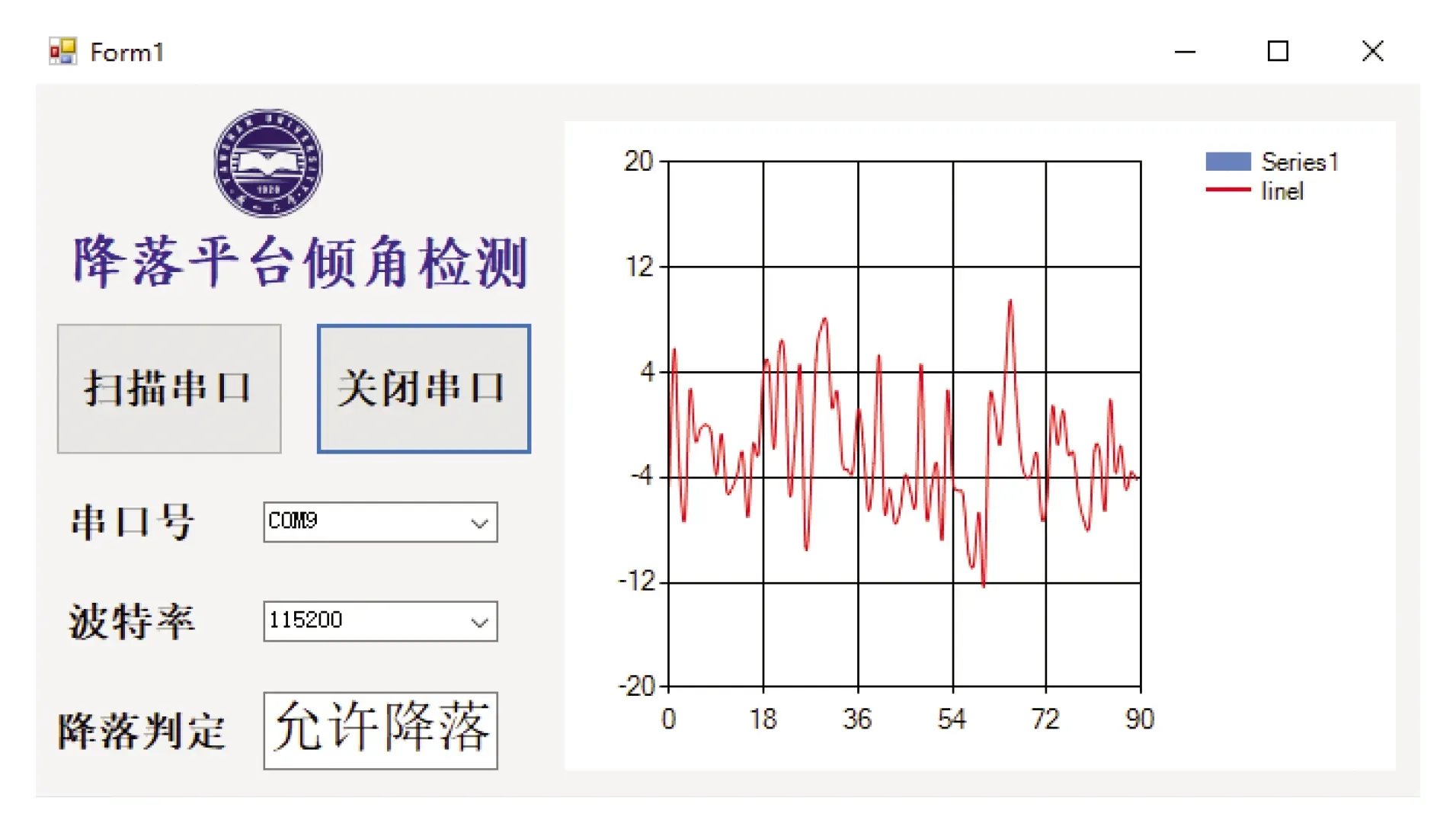
圖13 無人艇上降落平面的監測Fig. 13 Monitoring of landing planes on USV
分別對是否使用降落平面檢測系統進行了十次降落實驗,在實驗過程中,通過人為隨機晃動降落平面來模擬無人艇在海面上的起伏狀態,如圖14所示。未使用降落平面檢測系統的情況下,無人機不考慮降落平面的狀態而持續降落,在十次實驗中有四次會因平面傾角過大而滑落,降落成功率為60%。在使用降落平面檢測系統后,無人機在將降落平面傾角過大的情況下,保持懸停狀態,在安全傾角范圍內進行降落,十次實驗中僅有一次降落失敗,降落成功率為90%。實驗表明:采用文中方法能夠將降落的成功率提高30%,無人機在動態平面上的降落安全性得到了提升。

圖14 降落效果檢測實驗Fig. 14 Landing effect test
4 結論
本論文在總結國內外無人機控制與視覺識別技術的基礎上,結合動態降落平面的姿態變化,針對海面無人艇起伏狀態下無人機自主著艦問題,提出了一種基于降落平面姿態主動反饋的無人機降落方案。在模擬無人艇狀態下進行無人機自主降落實驗,結果表明,在以降落平面與水平夾角為6°的條件下,采用此方案進行降落的成功率提升了約30%,因此本方案適用于海上無人艇等動態平面環境下的無人機著陸。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
