基于模糊情感智能算法的動態電壓恢復器研究
2022-08-01 04:21:56李永祥李夢達馬夢琳
燕山大學學報 2022年4期
李永祥,李夢達,王 洋,馬夢琳
(上海電機學院 電氣學院,上海 201306)
0 引言
電壓暫降作為目前有統計以來發生最頻繁、對敏感負荷影響最大的電能質量問題[1-3],其良好治理方法一直是學者研究的重點。目前治理電壓暫降的有效手段之一是在負荷側安裝電能補償型電力電子裝置[4-5],常用的治理裝置有動態電壓恢復器(Dynamic Voltage Restorer,DVR)、多功能電壓暫降補償裝置、不間斷電源等,其中DVR以其較低的成本和較好的補償效果成為治理電壓暫降問題最經濟有效的電力補償設備[6-8]。
在國內DVR研究領域中,優化控制方法往往是提升DVR系統補償效果的關鍵,好的控制方法能在系統的穩定性、響應速度、補償精度等方面得以很好的體現。目前常見的控制方法主要是PI控制[9-10],但當PI控制應用于非線性強耦合DVR系統時,系統的負載適應性較差,當負載發生擾動時,若不及時調整PI參數,系統的穩定性會受到影響。文獻[11]通過模糊推理方法實現了PI參數的自整定,提高了系統的穩定性;文獻[12]提出了一種PR控制方法,文獻[13]提出一種基于PI和PR的復合控制策略,都在一定程度上提高了DVR 的補償精度。文獻[14]提出一種新的智能算法——情感智能算法,并將其應用于DVR系統。由于沒有梯度運算和專家規則,情感智能算法具有結構簡單、計算量小的優點,從而使DVR取得了很好的補償效果。文獻[15]將情感智能算法的模型進行簡化,進一步提高了DVR的補償速度,但文獻[14-15]都忽略了情感智能算法中權值學習率對情感智能控制器的影響,如果學習率選取不恰當,系統控制性能會變差,從而影響補償效果。
本文提出一種基于模糊情感智能算法的DVR系統,模糊情感智能算法通過模糊控制在線調整情感控制器中的權值學習率,在利用情感智能算法自整定優點的同時,又避免了因初始參數選擇不當帶來的系統不穩定情況,提高了控制器的穩定性和跟蹤精度,優化了DVR電壓補償性能。最后,通過搭建MATLAB/Simulink 仿真模型,驗證了所提改進方法的可行性和有效性。
1 DVR拓撲結構及原理
典型DVR拓撲主要分為4個單元:儲能單元、逆變單元、濾波單元及耦合單元。儲能單元提供補償電壓所需的能量;逆變單元將直流電壓轉化為需補償的交流電壓;濾波單元對輸出補償電壓進行高次諧波分量的濾除;耦合單元將電網與DVR裝置進行隔離,確保電網發生短路時不對DVR裝置造成嚴重損壞。
本文DVR拓撲結構以三單相H橋逆變器為主體框架,儲能單元為蓄電池,濾波單元為一般LC濾波器,DVR通過變壓器串聯接入電網,拓撲結構如圖1所示。
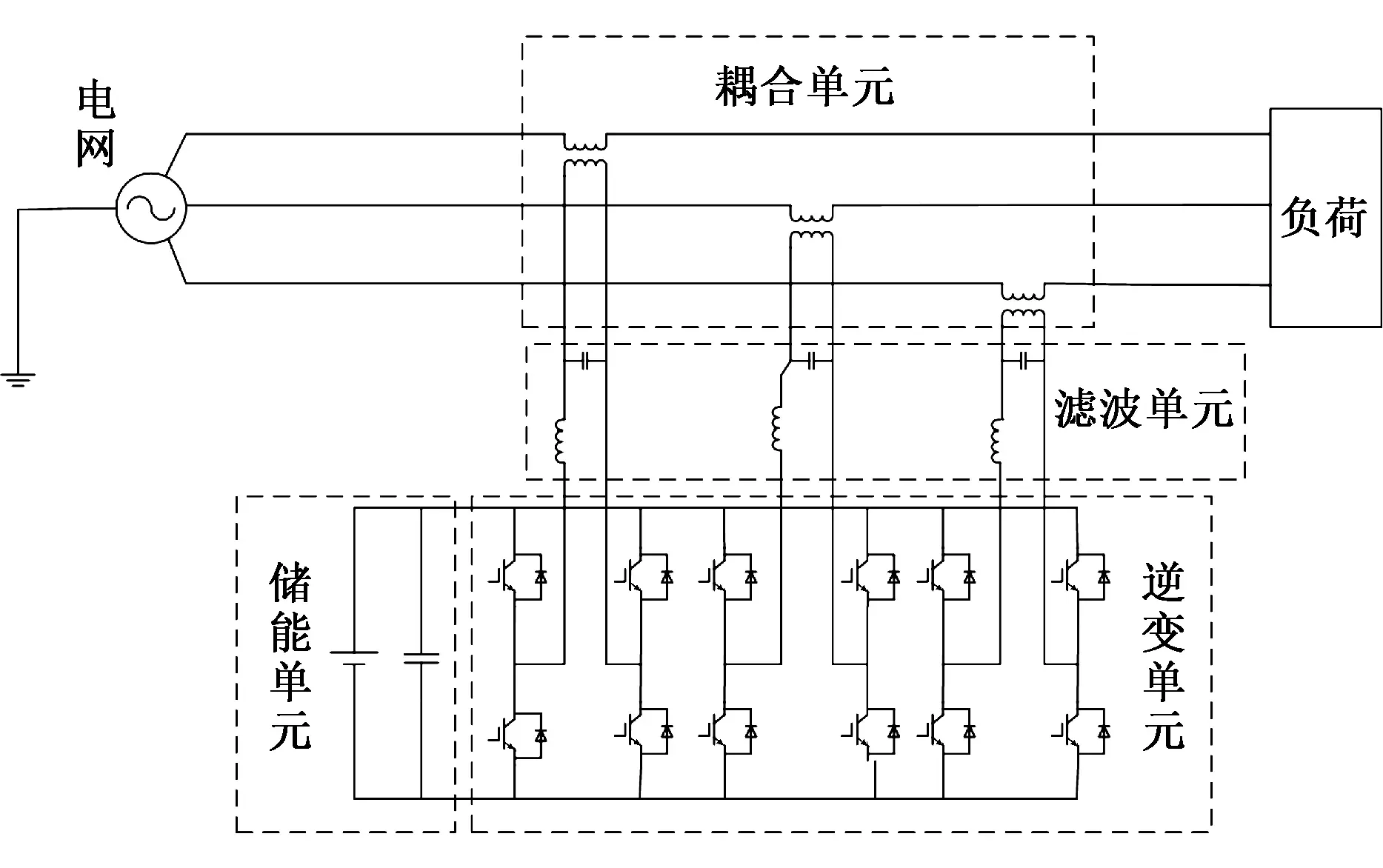
圖1 DVR拓撲結構Fig. 1 DVR topology
由于采用三單相H橋結構為逆變單元,每一相的控制都是獨立的,本文以A相為例,進行分析,其控制結構簡圖如圖2所示。
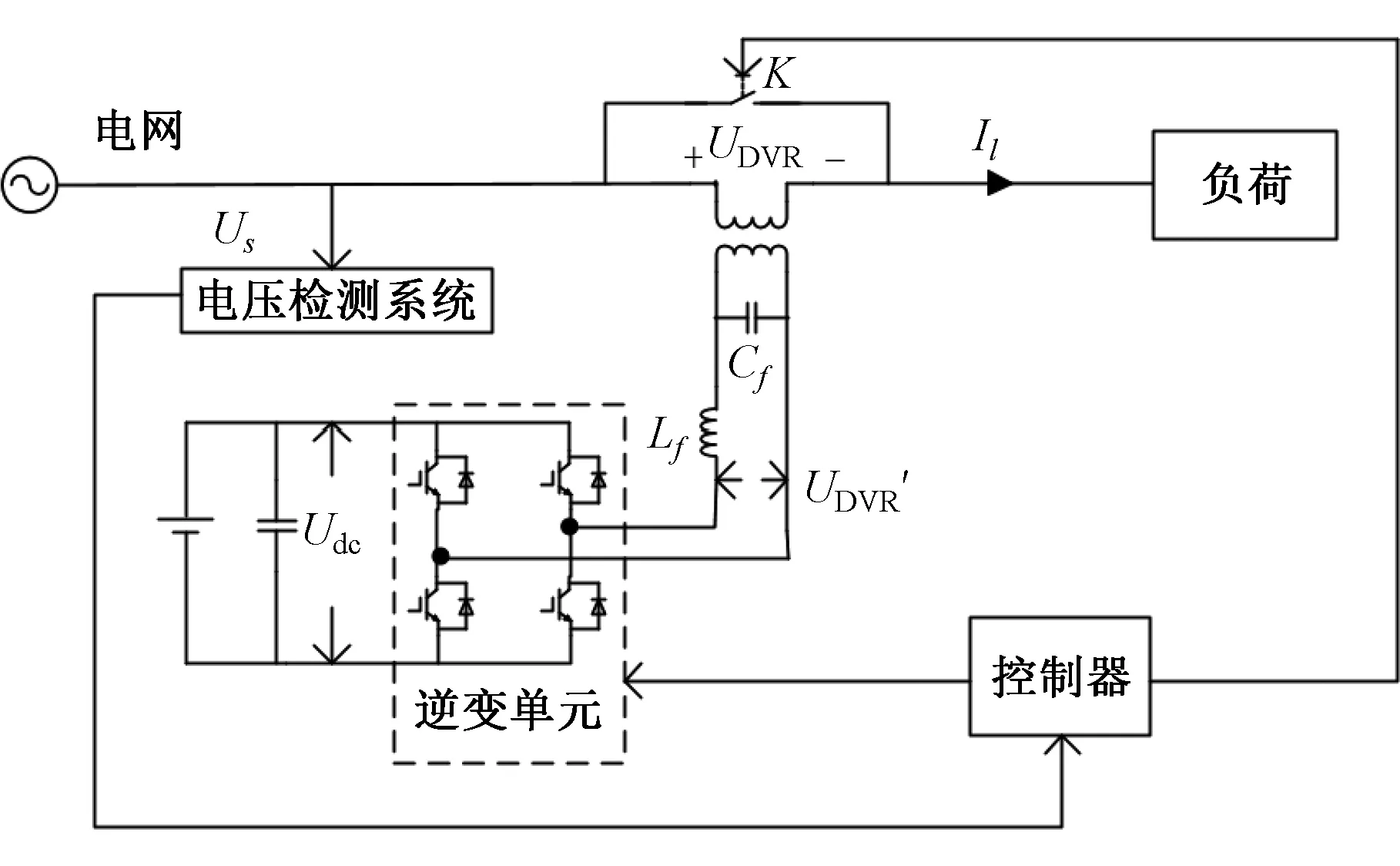
圖2 控制結構簡圖Fig. 2 Control structure diagram
當DVR利用檢測電路檢測到電網發生電壓暫降時,控制器控制轉換開關K斷開,DVR接入電網。與此同時,DVR利用檢測電路檢測出暫降后電壓,通過和額定參考電壓進行比對,選用合適的補償方法獲得期望補償電壓,控制器根據期望補償電壓產生相應PWM波形,控制逆變器開關的通斷,從而輸出補償電壓,保持負載側電壓穩定。
2 基于模糊情感智能的DVR系統
2.1 情感智能算法
情感智能算法主要是對大腦情感學習的一個建模過程,大腦中情感學習的主要部位是杏仁體,杏仁體通過接受來自不同感覺聯合區的信息,記憶并鞏固人的情感,可建立如圖3所示模型來描述其學習過程。

圖3 大腦情感學習模型Fig. 3 Brain emotional learning model
圖3中的丘腦、感官皮質、眶額皮質和杏仁體分別將接收到的感官輸入信號Si和獎勵信號R進行運算處理后,得到模型輸出為
(1)
式中,νi、wi分別為杏仁體、眶額皮質的可調權值。
通過對權值νi和wi的更新調整,模型能實現對情感的更好學習。具體表達式為
Δνi=α·Si·max(0,R-A),(2)
Δνn+1=α·Smax·max(0,R-A),(3)
Δwi=β·Si·(E-vn+1Smax-R),(4)
(5)
式中:i=1,2,…,n;Δνi為杏仁體的權值變化值;α為杏仁體的權值學習率;Δwi為眶額皮質的權值變化值;β為眶額皮質的權值學習率;ri為獎勵信號R的可調權值。
2.2 DVR系統中情感控制器的設計
將情感智能算法應用于DVR控制中,其控制系統結構框圖如圖4,將DVR中期望補償電壓與反饋的實際補償電壓的差值傳遞到感官輸入及獎勵信號函數中,經過情感控制器處理后,輸出理想補償電壓,最后通過PWM模塊進行實際補償電壓的輸出。
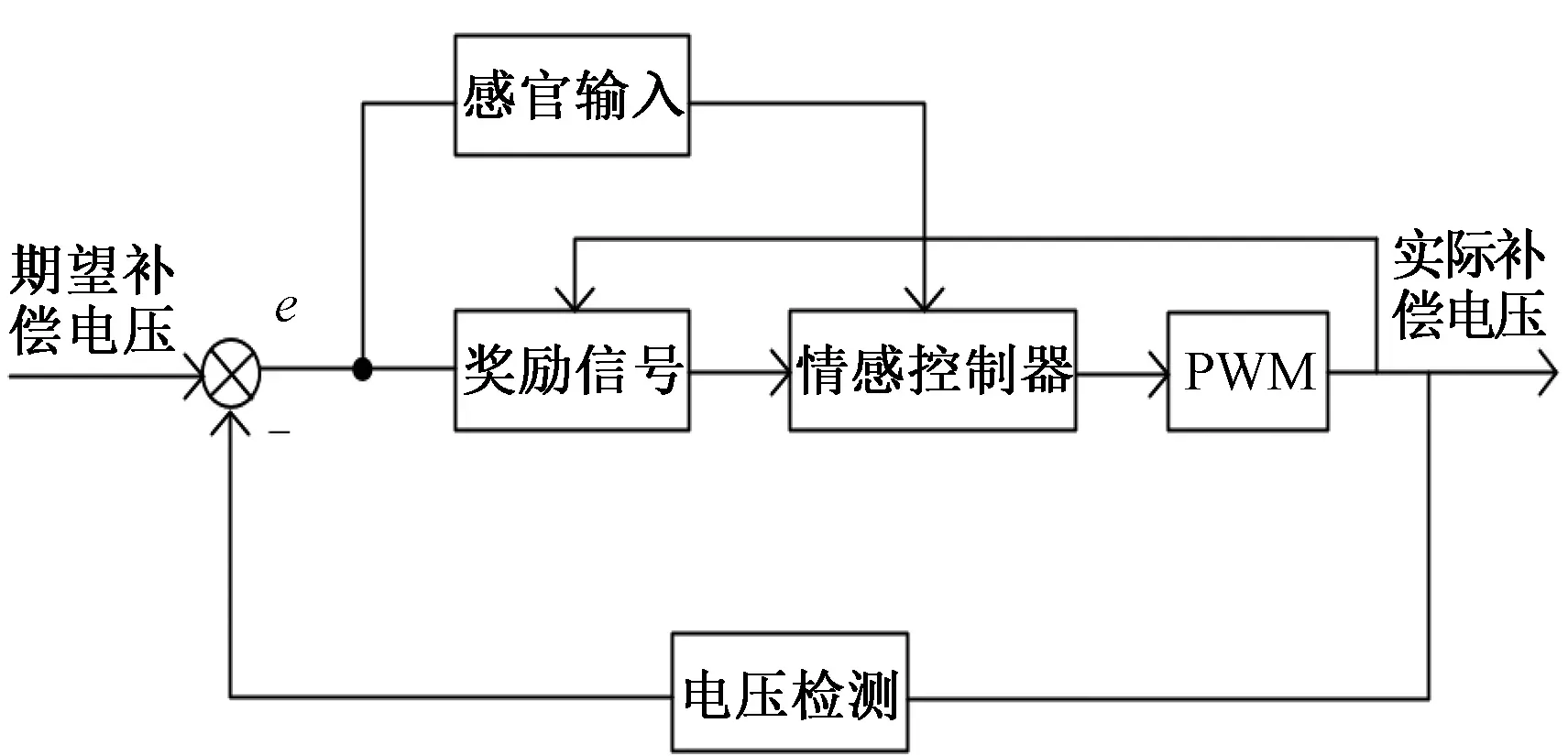
圖4 情感智能DVR控制系統結構Fig.4 Structure of emotion intelligent DVR control system
本文選擇感官輸入信號為DVR中期望補償電壓與檢測的實際補償電壓的差值及其差值的積分形式,即

(6)
將式(6)代入式(1),可得到最終模型輸出為
E=A-O=(ν1-w1)·s1·e+

(7)
將式(6)代入式(2)~(5)中,得到權值變化值的表達式為
Δνi=α·Si·max(0,R-A)i=1,2,(8)
Δν3=α·Smax·max(0,R-A),(9)
Δwi=β·Si·(E-νn+1Smax-R)i=1,2,(10)
獎勵信號R變為

(11)
目前已知的情感智能算法中,其權值學習率都為定值,而由于所要應用的DVR系統有很強的非線性特點,固定的權值學習率勢必會影響系統的調節品質。為了優化情感智能算法,使其更適用于DVR系統,本文采用模糊控制算法來對其權值學習率進行模糊調節,具體調節規則見下小節。
2.3 基于模糊控制的權值學習率調節
采用模糊控制算法調節權值學習率,主要難點在于模糊規則的制定。由于目前在情感智能算法的研究資料中,對權值學習率的調節文獻較少,為了確定權值學習率的具體模糊調節規則,本文分別對杏仁體的權值學習率α和眶額皮質的權值學習率β取不同數值,按圖4結構在Simulink中搭建基于情感智能的DVR系統模型,并進行系統階躍響應實驗。
學習率具體取值情況如表1所示。
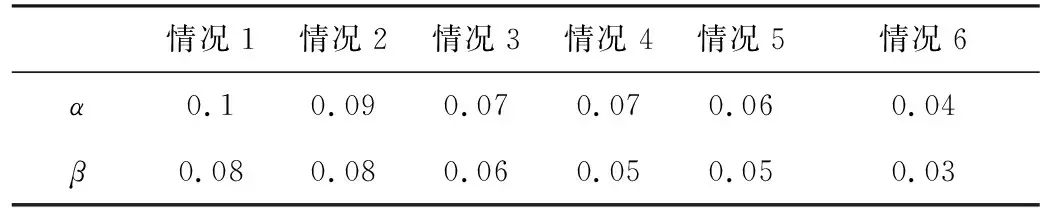
表1 學習率情況取值表Tab.1 Value of learning rate
情感控制器中的權重參數采用MATLAB/Simulink中的Signal Constraint模塊進行優化。經優化后,感官輸入的權重值s1、s2分別取為5.121、20.056;獎勵信號的可調權值r1、r2、r3分別取為0.021、0.013、0.033。
經過階躍響應驗證,得到結果曲線如圖5所示。
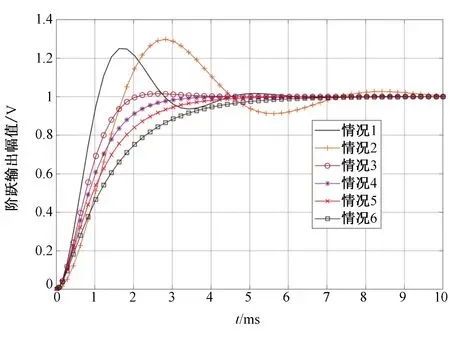
圖5 不同情況學習率階躍響應曲線Fig. 5 Step response curve of learning rate under different conditions
由圖5可知:當權值學習率α和β過大時(如情況1、情況2,此時α和β值都大于0.07),系統的超調過大;當權值學習率α和β過小時(如情況6,此時α和β值都小于0.05),系統響應速度過慢;且在合適取值范圍內,當權值學習率α不變,β減小時,系統的超調量變小;當權值學習率α減小,β不變時,系統的響應速度變慢。基于以上分析可知,權值學習率取值情況不同,其系統的響應效果不同,且權值學習率α對系統的響應速度影響較大,權值學習率β對系統的超調量影響較大。
根據系統階躍響應曲線,進行模糊控制的權值學習率調節,具體步驟如下:
1) 輸入、輸出變量論域的確定
輸入變量,即期望補償電壓與實際補償電壓的偏差e和偏差變化率ec的論域確定可通過進行多次基于情感智能算法的DVR系統仿真實驗,找出其中最大的偏差及偏差變化率值,本文偏差e的基本論域取為[-10,10],偏差變化率ec的基本論域取為[-0.6,0.6];本文偏差e與偏差變化率ec的模糊論域均取為[-6,6]。
輸出變量分別為權值學習率變化量Δα與權值學習率變化量Δβ,本文輸出變量Δα與Δβ模糊論域變化范圍均為[-6,6],實際變化范圍均為[-0.02,0.02]。
2) 輸入、輸出變量模糊子集語言變量的選擇
定義E,EC,ΔX,ΔY分別為e,ec,Δα,Δβ的模糊子集,其語言變量都選擇為{NB,NM,NS,ZO,PS,PM,PB}。
3) 隸屬函數的確定
隸屬函數選擇三角隸屬函數,具體隸屬規則如圖6。
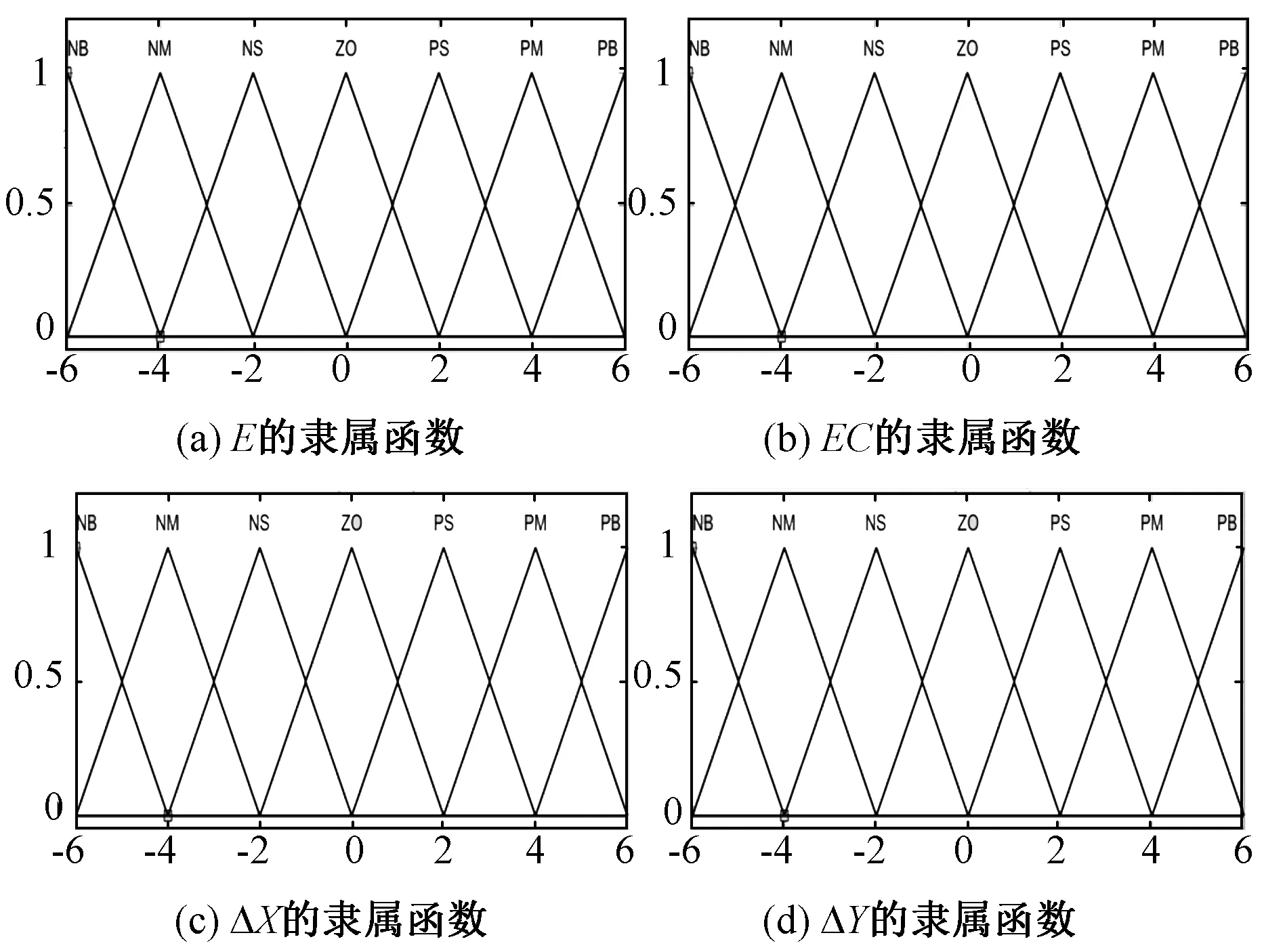
圖6 輸入輸出隸屬函數Fig. 6 Input and output membership function
4) 模糊推理規則的確定
模糊推理采用Mandani型模糊推理規則,具體推理規則如表2和表3。得到模糊推理規則曲面如圖7所示。
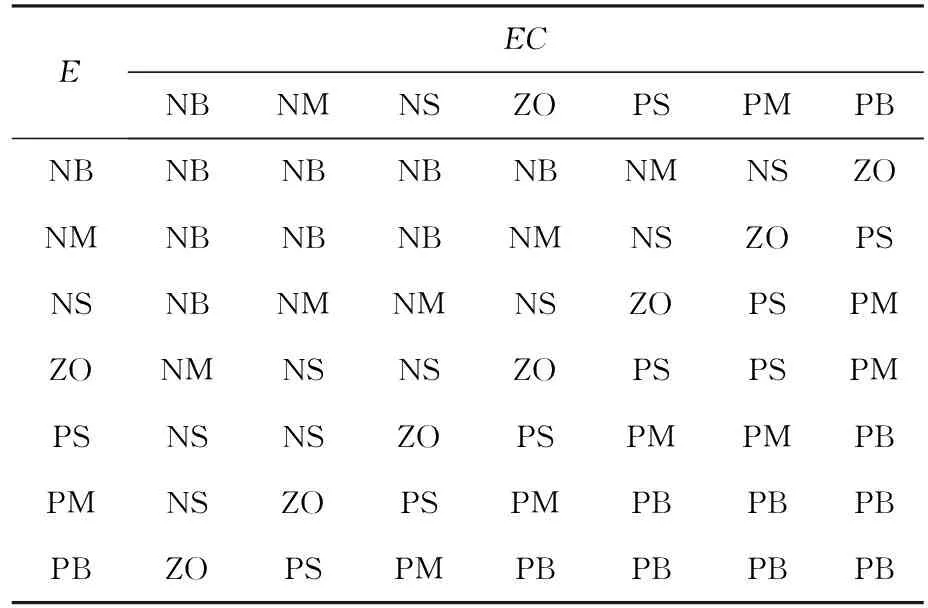
表2 ΔX的模糊控制規則表Tab.2 Fuzzy control rule table of ΔX
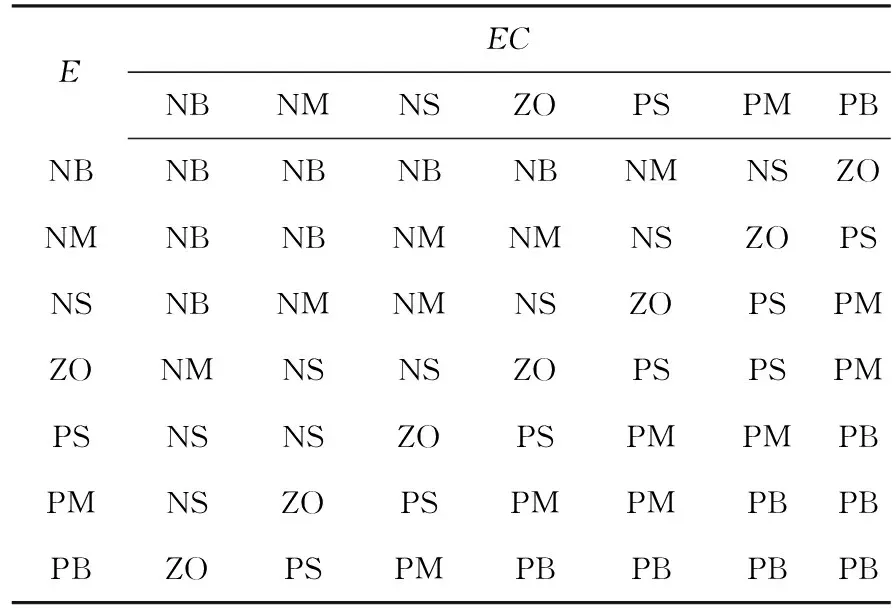
表3 ΔY 的模糊控制規則表Tab.3 Fuzzy control rule table of ΔY

圖7 模糊推理規則曲面Fig. 7 Fuzzy inference rule surface
由此,便可通過模糊控制完成對權值學習率的在線調節。
為驗證模糊情感智能算法在DVR系統中的控制性能,搭建模糊情感智能DVR系統,并進行系統階躍響應實驗,取權值學習率α的初值為0.07,權值學習率β的初值為0.05,感官輸入權重s1、s2分別為5.121、20.056,獎勵信號的可調權值r1、r2、r3分別取為0.021、0.013、0.033。響應結果和無模糊控制情感智能DVR階躍響應實驗中的情況5做對比,對比結果如圖8所示。
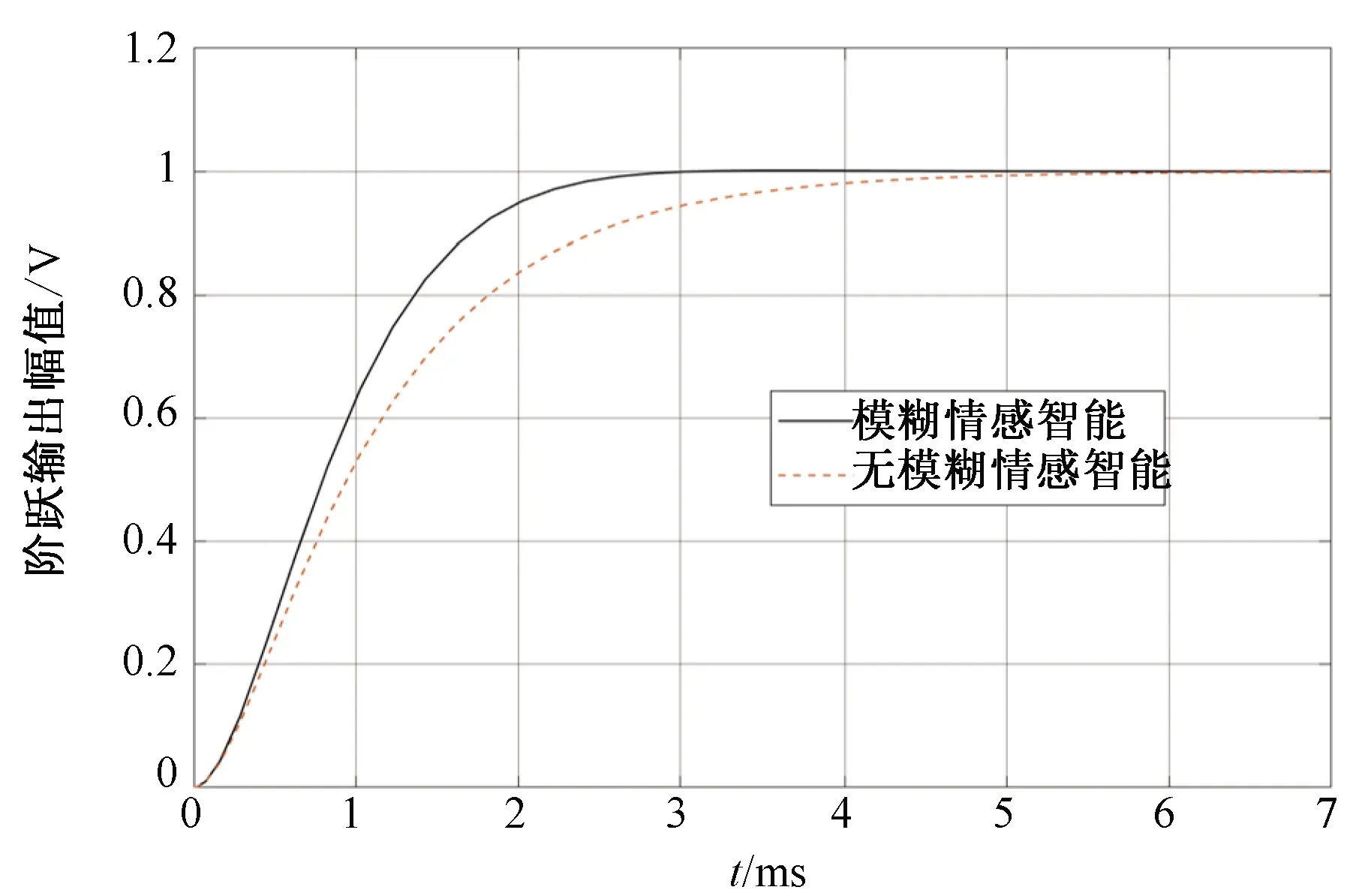
圖8 模糊與無模糊情感智能階躍響應Fig. 8 Fuzzy and non-fuzzy emotional intelligent step response
由圖8可以看出,采用模糊情感智能算法,系統在3 ms左右達到穩定,相比于無模糊情感智能控制系統,其系統達到穩態時間更短,響應效果更好。
2.4 補償控制流程
基于模糊情感智能的DVR系統補償控制框圖如圖9所示。
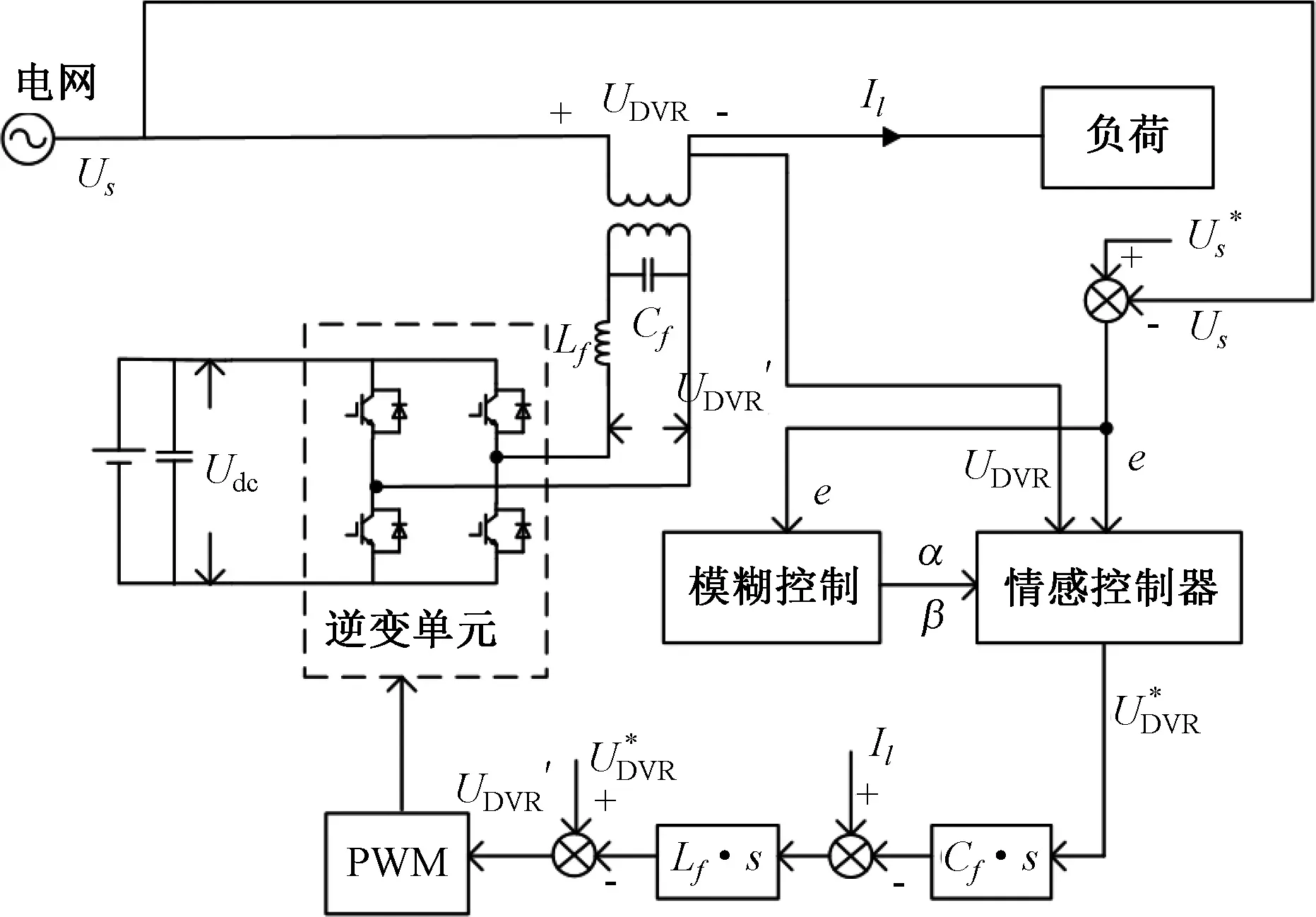
圖9 補償控制框圖Fig. 9 Compensation control diagram
具體補償控制由以下三個環節來完成:
1) 電壓暫降檢測及采樣環節
檢測電路實時檢測電網電壓,當電網電壓發生暫降時,DVR裝置接入電網,輸出補償電壓。與此同時,檢測電路完成對實際電網電壓Us與DVR輸出補償電壓UDVR的采樣,并將其傳給情感控制器。
2) 模糊情感控制環節

3) PWM逆變環節

3 仿真
為了驗證文中所提理論的正確性,在MATLAB/Simulink 仿真環境下對基于模糊情感智能控制的DVR系統以及無模糊情感智能控制的DVR系統進行仿真,具體仿真參數如表4所示。
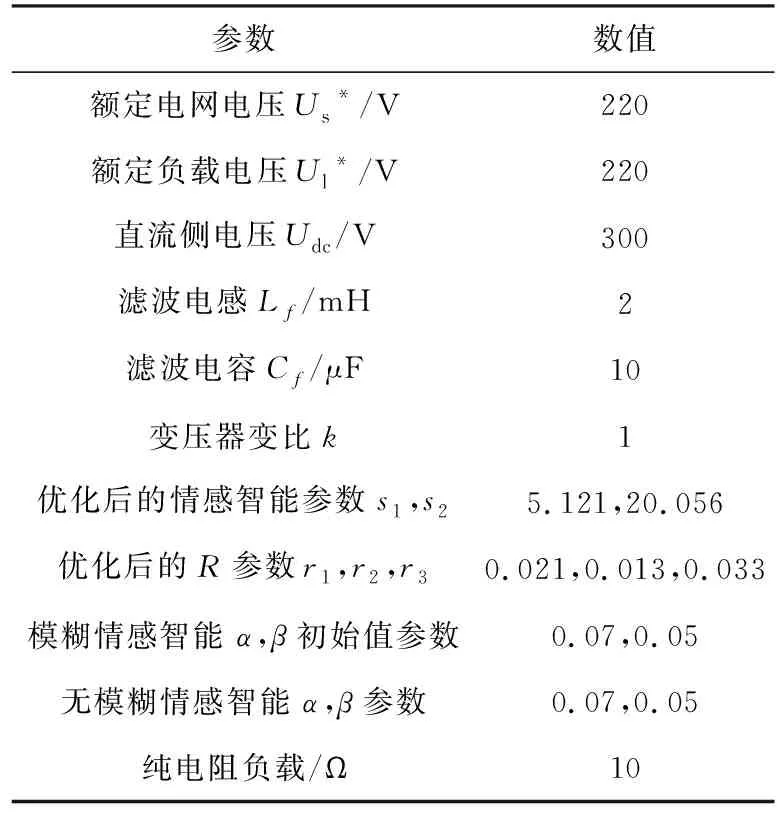
表4 仿真參數Tab.4 Simulation parameters
1) 模糊情感智能控制優越性分析
為了驗證文中所提基于模糊情感智能控制的DVR系統的優越性,設定在0.1 s到0.2 s間電網電壓發生了30%的電壓暫降,如圖10所示,此時基于模糊情感智能和無模糊情感智能的DVR輸出補償電壓波形和補償后的負載電壓波形如圖11所示。
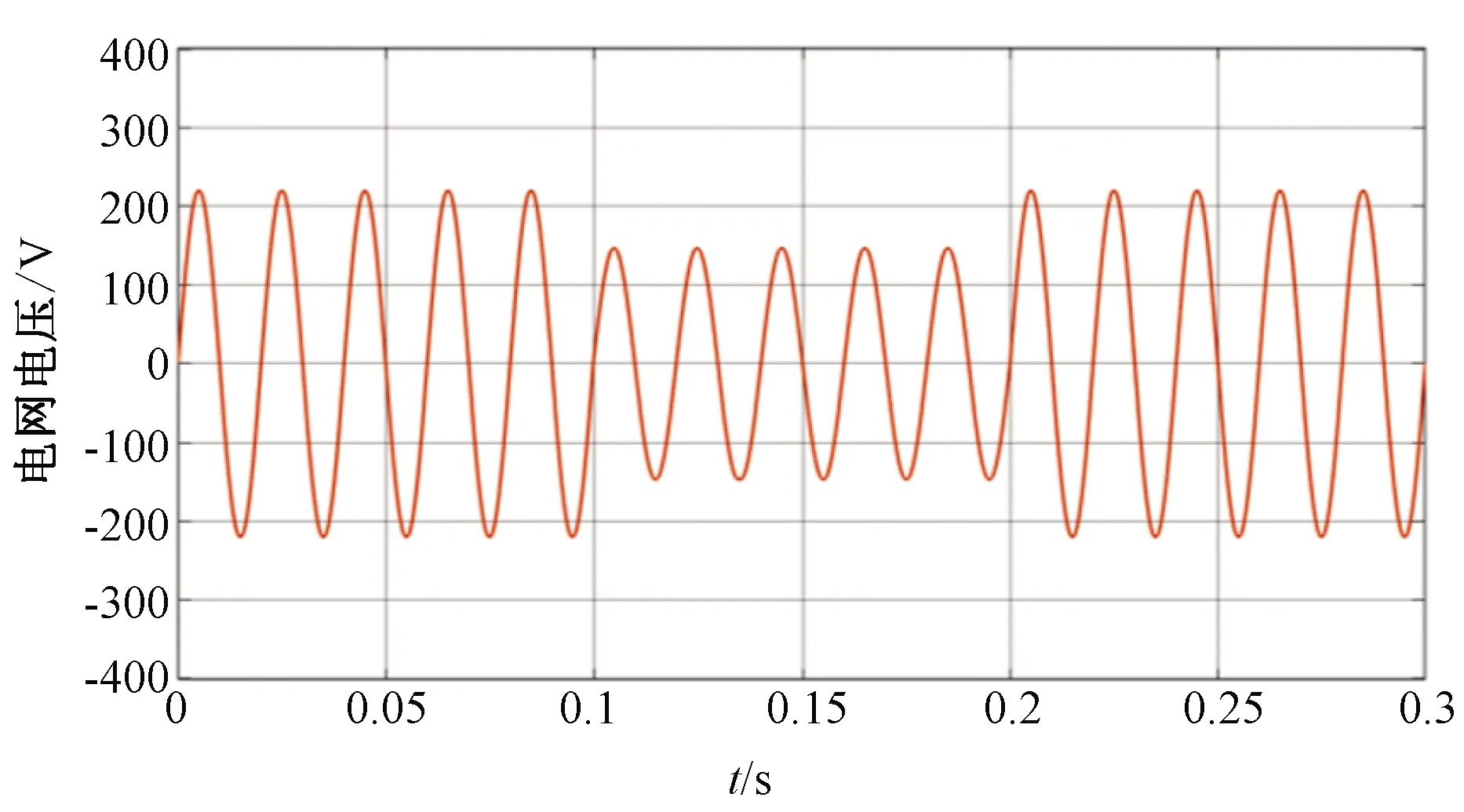
圖10 電網電壓波形(30%電壓暫降)Fig. 10 Grid voltage waveform(30% voltage sag)
由圖11可知,當電網電壓從0.1 s開始發生暫降到0.2 s暫降結束時,基于模糊情感智能的DVR系統比無模糊情感智能的DVR系統能更快開始電壓補償,且補償第一個波峰所需的時間更短,波峰的峰值更接近220 V,整個仿真周期負載電壓也較為穩定。由此可知,通過模糊控制改進的情感智能DVR系統具有較好的系統穩定性和更快的響應速度,其系統補償性能是更優越的。
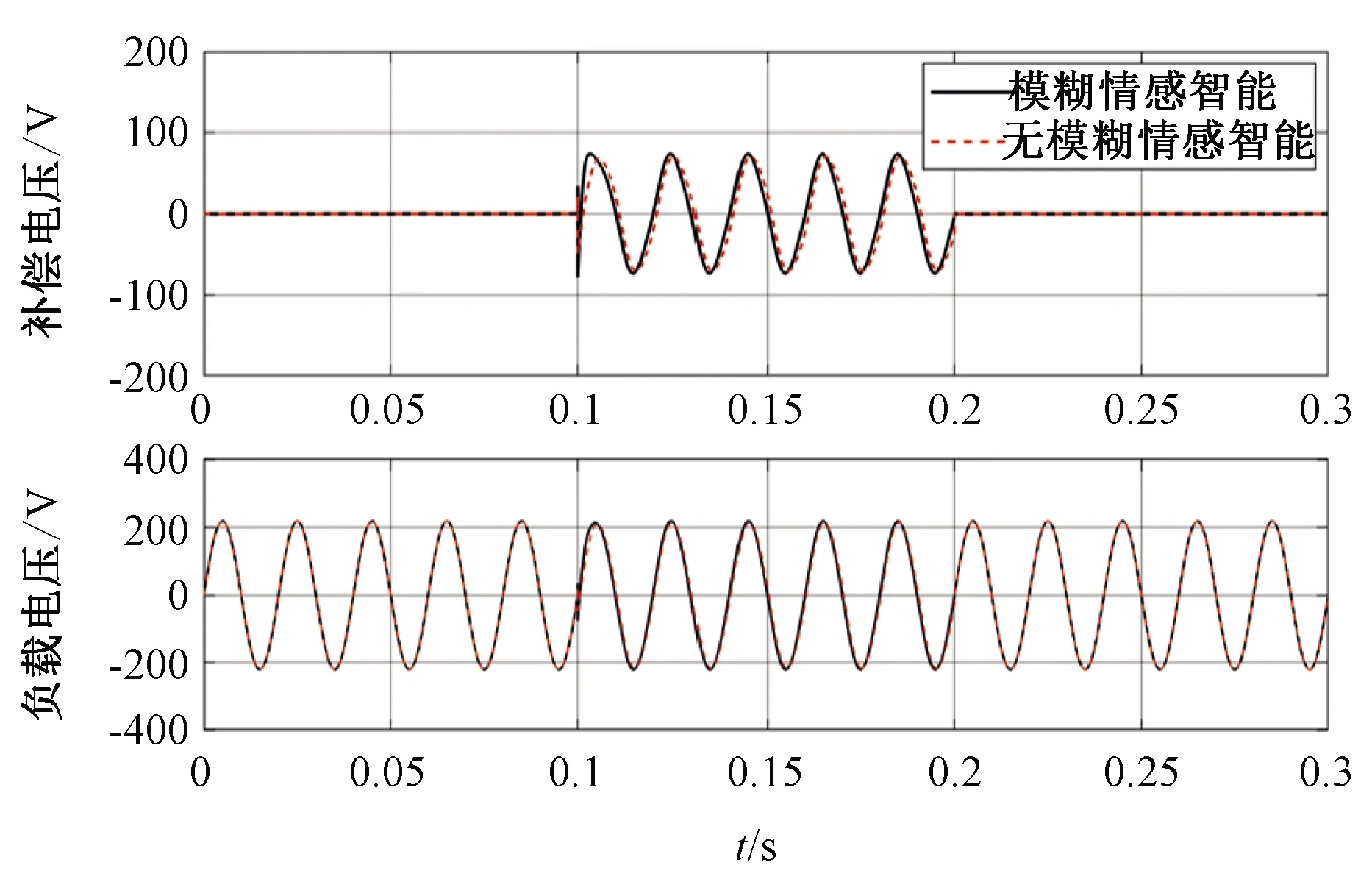
圖11 負載與補償電壓波形(30%電壓暫降)Fig. 11 Load voltage and compensation voltage waveform(30% voltage sag)
為了進一步驗證所提改進算法的可行性,將原來設定成30%的電網電壓暫降改成50%,如圖12所示,此時基于模糊情感智能和無模糊情感智能的DVR輸出補償電壓波形和補償后的負載電壓波形如圖13所示。
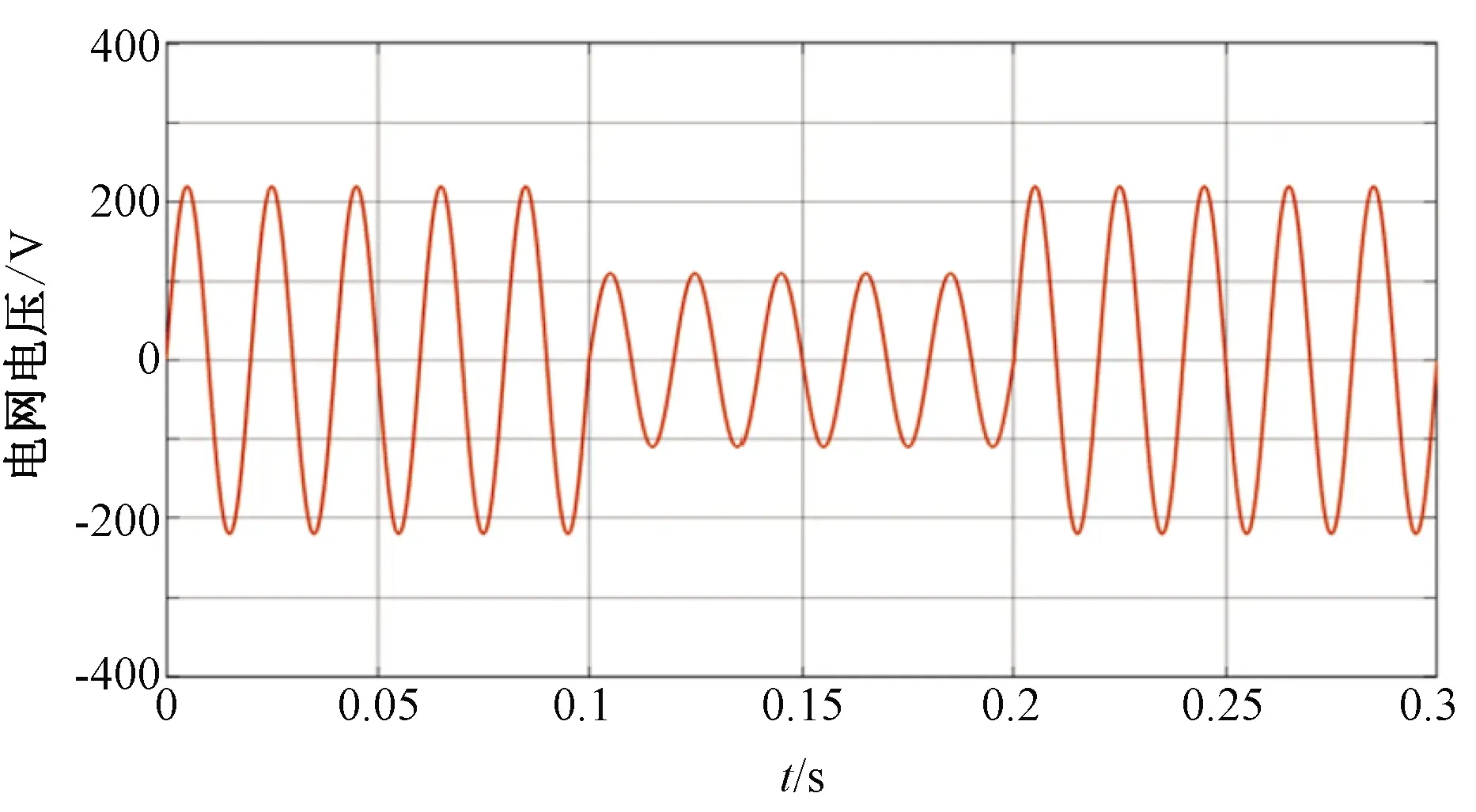
圖12 電網電壓波形(50%電壓暫降)Fig. 12 Grid voltage waveform(50% voltage sag)
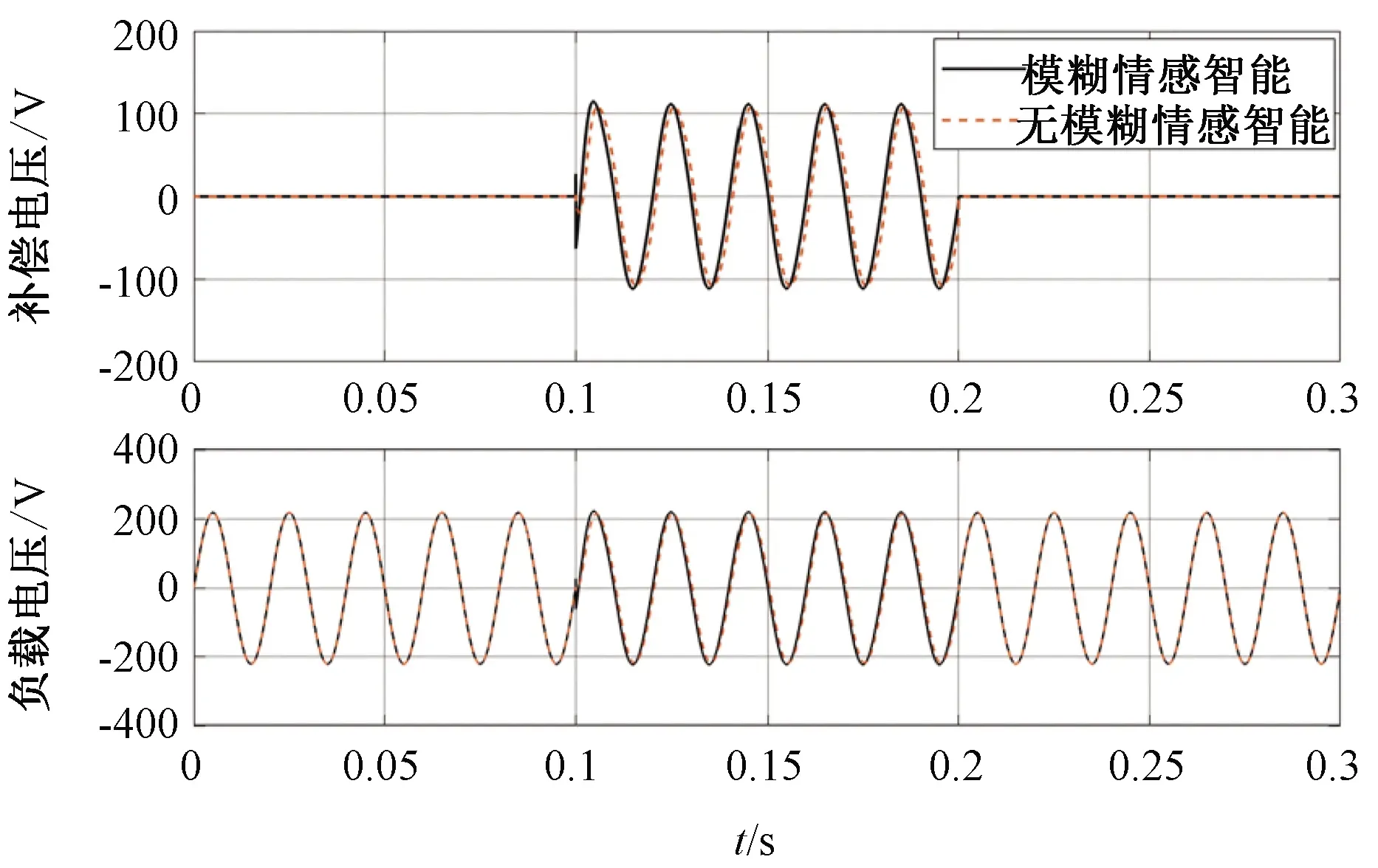
圖13 負載與補償電壓波形(50%電壓暫降)Fig. 13 Load voltage and compensation voltage waveform(50% voltage sag)
由圖13可知,雖然電網電壓的暫降程度加深了,但基于模糊情感智能的DVR系統與無模糊情感智能的DVR系統都能對跌落電壓進行較好補償,且同樣地,基于模糊情感智能的DVR系統比無模糊情感智能的DVR系統補償響應更快,同時電壓恢復響應時間也有相應程度的縮短。由此便進一步驗證了所提模糊情感智能算法的正確性。
表5列出了本文所提算法與文獻[14-15]所提情感智能算法在電網電壓暫降30%和50%時將電網電壓恢復到額定電壓的90%所需的時間。
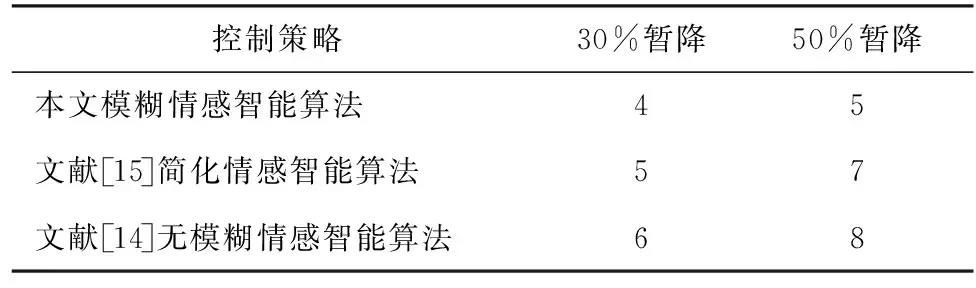
表5 響應調節時間比較Tab.5 Response adjustment time comparisonms
由表5數據可以看出,本文所提基于模糊情感智能算法的DVR系統在響應調節時間上,相比其他文獻的更短,發生50%暫降所需時間也只需5 ms,符合DL/T 1229中DVR響應時間不宜大于5 ms的要求。
2) 負載適應性分析
由于實際電網中的電壓暫降對敏感負荷影響較大,本文對不同類型的敏感負荷進行仿真分析。圖14和圖15分別為模糊情感控制時阻感性負載(負載電阻10 Ω,負載電感25 mH)和阻容性負載(負載電阻10 Ω,負載電容40 μF)的仿真情況。
從圖14和圖15仿真結果可以看出,當電網電壓發生暫降時,基于模糊情感控制的DVR都能在較短的時間內對電網電壓進行補償,且補償效果比較理想,這表明文中所提模糊情感智能控制具有較好的負載適應性。
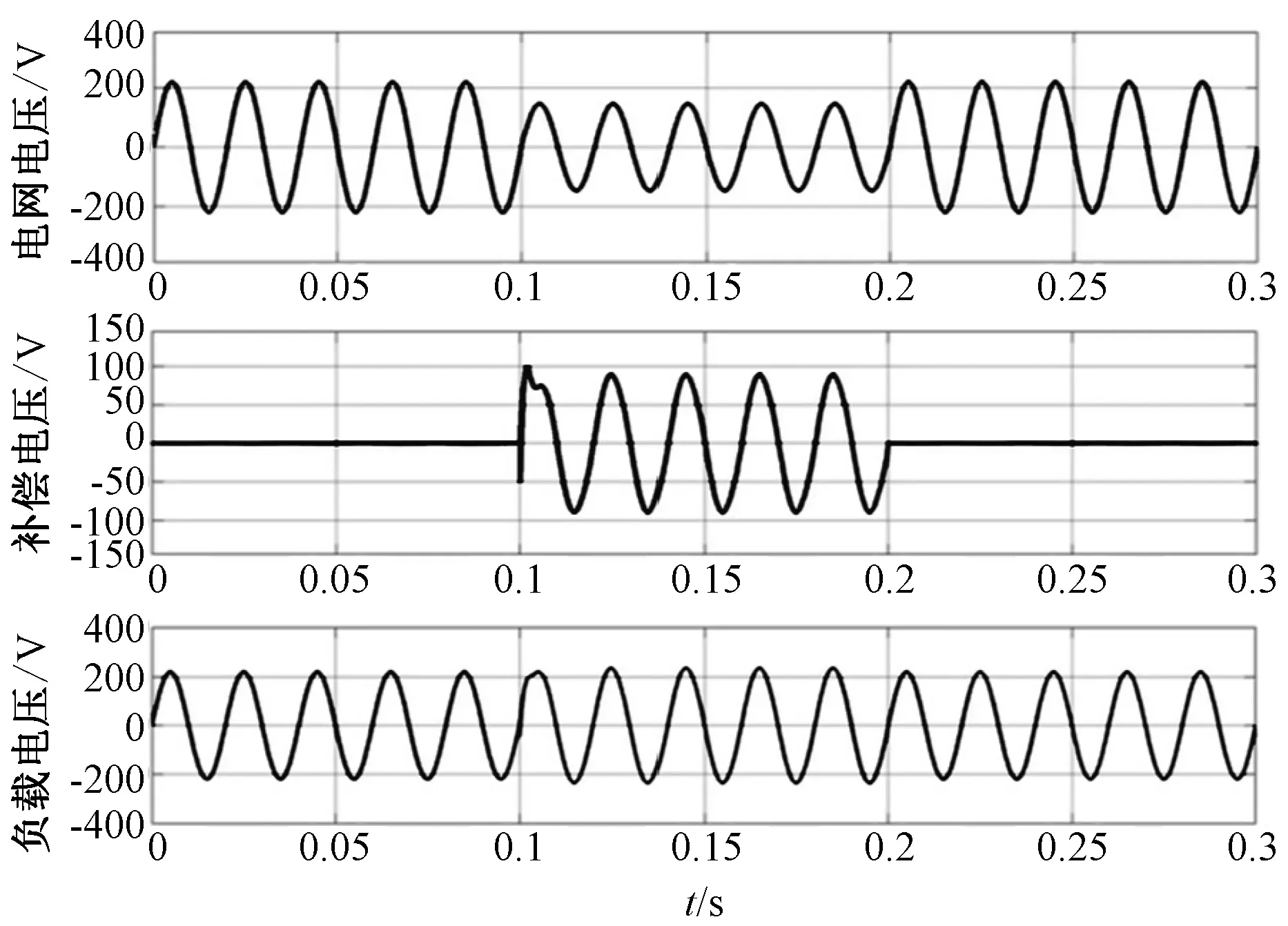
圖14 阻感性負載情況波形Fig. 14 Resistive-inductive load waveform
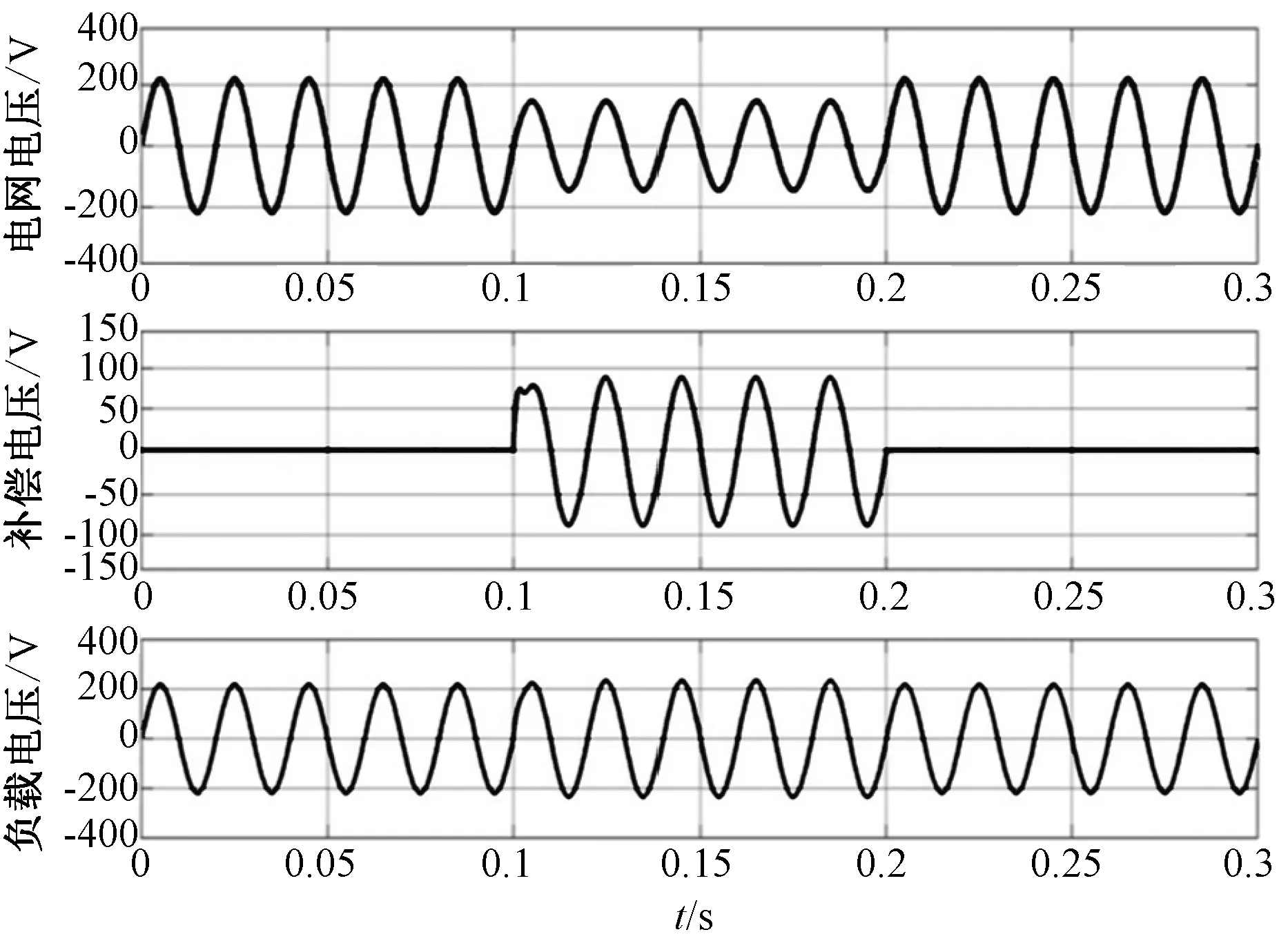
圖15 阻容性負載情況波形Fig. 15 Resistive-capacitive load waveform
3) 三相不平衡跌落分析
上述仿真結果都是在三相電壓平衡跌落的情況下驗證的,為了更好地驗證文中所提基于模糊情感智能控制的DVR系統的可行性,設定在0.1 s到0.2 s間電網電壓發生了三相不平衡電壓跌落,其中A相電網電壓發生了30%的電壓暫降,B相電壓發生了50%的電壓暫降,C相電壓發生了100%的電壓暫降,圖16為電網電壓、補償電壓和負載電壓的仿真圖。
從圖16的仿真結果可以看出,模糊情感智能控制DVR在三相電壓不平衡跌落程度較大的情況下,仍能較好地輸出補償電壓,使負載側電壓保持穩定。
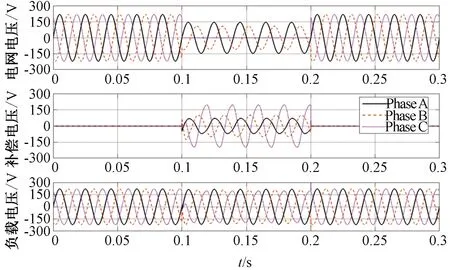
圖16 三相電壓不平衡情況波形Fig. 16 Three-phase voltage unbalanced drop waveform
4 結論
本文針對電網電壓暫降問題,在已有的情感智能控制算法基礎上,提出一種基于模糊情感智能算法的動態電壓恢復器,并通過Simulink進行仿真驗證,仿真結果表明:
1) 通過模糊控制算法實時調節權值學習率,能夠進一步優化情感控制器的控制性能,提升DVR的補償精度與補償速度。
2) 相比于無模糊情感智能控制及簡化情感智能控制的DVR系統,采用模糊情感智能控制的DVR系統其響應速度更快,補償的波峰峰值更接近220 V,且恢復到90%額定電壓所需的時間更短,控制在5 ms以內(滿足DL/T 1229標準的要求),電壓補償效果更好。
3) 經過模糊控制算法改進后DVR系統,在不同負載及不平衡電壓跌落情況下,補償能力并沒有受到影響,補償效果仍較為理想。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中國生殖健康(2020年5期)2021-01-18 02:59:48
北京測繪(2020年12期)2020-12-29 01:33:58
北極光(2019年12期)2020-01-18 06:22:10
小太陽畫報(2019年10期)2019-11-04 02:57:59
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
