基于改進A*算法的物流無人機路徑優化
2022-08-01 04:02:32張森森李科揚
現代計算機 2022年11期
張森森,陳 肯,李科揚
(中國民用航空飛行學院空中交通管理學院,廣漢 618307)
0 引言
隨著經濟的發展,人們對物流配送服務的要求越來越高,而物流無人機憑借其不受交通限制、調度方便靈活、速度快等特點,能有效破解物流末端“最后一公里”的難題,很多物流企業順應潮流發展無人機物流服務,中國民用無人機的發展已經進入了快速增長階段,因此對于無人機物流路徑的研究具有現實意義。文獻[4-6]研究了車輛-無人機組合運輸問題,以運輸固定成本、運營成本和時間窗成本之和為目標函數,構建了基于TSP 的車輛-無人機擴展路徑模型,通過一種改進的迭代算法,確定無人機配送路線;文獻[7-14]運用函數模擬及柵格法建立環境模型,利用多種改進的A*算法、遺傳算法、粒子群等算法仿真無人機三維運行環境下的最優路徑;文獻[15]提出了一種在偵察區域內通過掃描獲取偵察帶寬的方法偵察指令,然后結合無人機偵察飛行軌跡計算最短路徑原理;文獻[16]把各個航路點拆開處理,根據不同航路點分別進行定向搜索,通過仿真實驗驗證定向進化的可靠性;文獻[17]對有禁飛區的區域進行路徑規劃時,通過建立飛行威脅模型,用雙向搜索策略和逆向引導策略解決此類問題。
前人的研究成果主要傾向于無人機的碰撞風險、自主智能避障等方面;對于復雜低空、影響路徑規劃的因素進行了簡化處理,不符合無人機真實運行場景。本文基于柵格法模擬無人機運輸三維環境,以路徑最優化為目標,利用改進的A*算法與傳統A*算法和RRT算法比較分析,探索物流無人機最優路徑。
1 環境模型
環境建模的目的是模擬無人機真實運行場景,通過模擬分析研究物流無人機路徑優化問題。利用柵格法的建模思想,將無人機運輸環境模擬為有很多小方塊組成的空間,相當于把三維空間數字化處理,同時令障礙物為1,非障礙物為0。柵格的大小會影響到模擬效果,柵格較小時由于需要存儲較多的信息,干擾信號也會隨之增加,規劃效率和效果隨之下降;反之,很少的信息存儲量會使得規劃效率隨之加快,但環境信息劃分會變得較為模糊,不利于有效路徑的規劃。因此,選擇合適的柵格大小也是影響規劃效果的一個因素。
可以根據無人機運輸環境需要進行柵格化二維處理,黑色區域代表障礙物,如圖1 所示,把無人機運行環境分成100個小格,并且分別指定好起點和終點。利用三維坐標系建立無人機運輸環境,產生以A 點為中心的長方形區域,將其模擬為現實環境,如圖2所示。
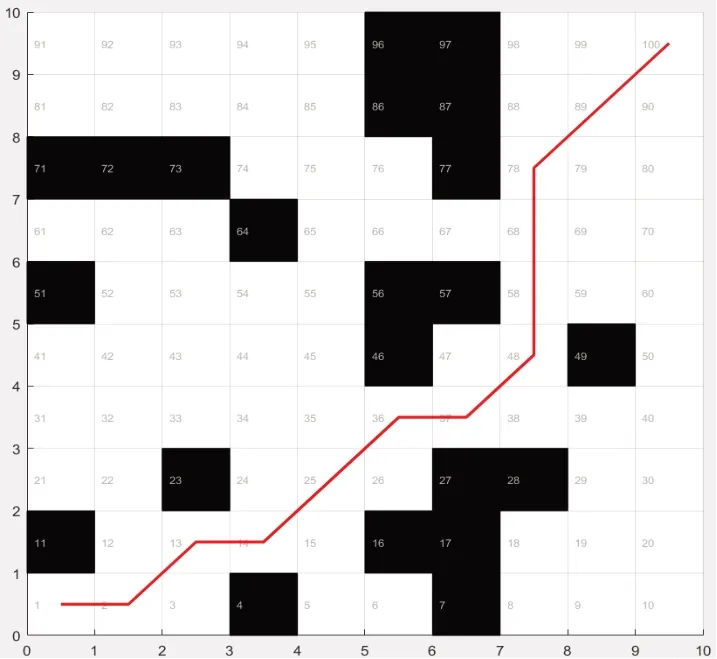
圖1 規劃環境二維柵格化示意
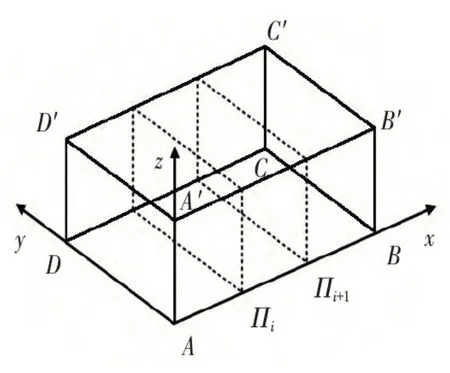
圖2 規劃環境三維柵格化示意
2 改進A*算法
2.1 傳統A*算法原理
A*算法考慮將起始點到當前節點的實際路徑耗散也作為遴選的條件,表達式為:

其中,()為路徑規劃起始點到中間點所付出的航程代價,()為中間點到最終點估計的航程代價。
實際代價函數()表達式為:

其中,、、分別為最小路徑長度、最大航程、轉彎角和俯仰角,詳細敘述見文獻[1]:、、為系數,且++= 1。
啟發函數h(n)的選取影響A*算法的搜索策略,本文將歐氏距離、曼哈頓距離和others距離三者結合使用,提高啟發函數的質量。

其中,、、分別是歐氏距離、曼哈頓距離others距離的權重系數,且++= 1。
2.2 改進A*算法
2.2.1 使用hash和堆減少每個柵格的計算量
具體來說,需要使用hash 表備份Open 表,通過優化Open 表,使得所選擇的節點帶有“可參照性”,而不是單單的直接從Open 表中取。如果Open 表在放入數據之前,我們就讓它按照一定順序,那么從Open 表中取數據時,這些數據就是具備順序的,是有“可參照性的”。可以選擇優先隊列的方式。
2.2.2 雙向搜索策略
雙向搜索相當于有兩個起始點,雙向去搜索路徑,最后相交于同一點。通過正反向搜索相互切換,如此交替往復運行,直到找到一條最優路徑。
2.2.3 改進啟發函數
動態衡量啟發式為:

其中()>=1。把()變成了()*(),在搜索過程中,我們可以通過改變()來影響()對A*算法的影響。具體原理是在搜索初始階段搜索速度較快,搜索末期速度較慢,傾向于搜索最優路徑。可以推理出,()越大,越趨近于BFS 算法;而()越小,則相對趨近于Dijkstra算法。
2.2.4 路徑平滑處理
通過平滑處理可以消除拐點、折角等現象,使飛行路徑更加平滑,也更接近于真實飛行方式,可以采用B 樣條法對初始路徑進行優化處理。
3 算法流程
本文算法流程設計如圖3所示。
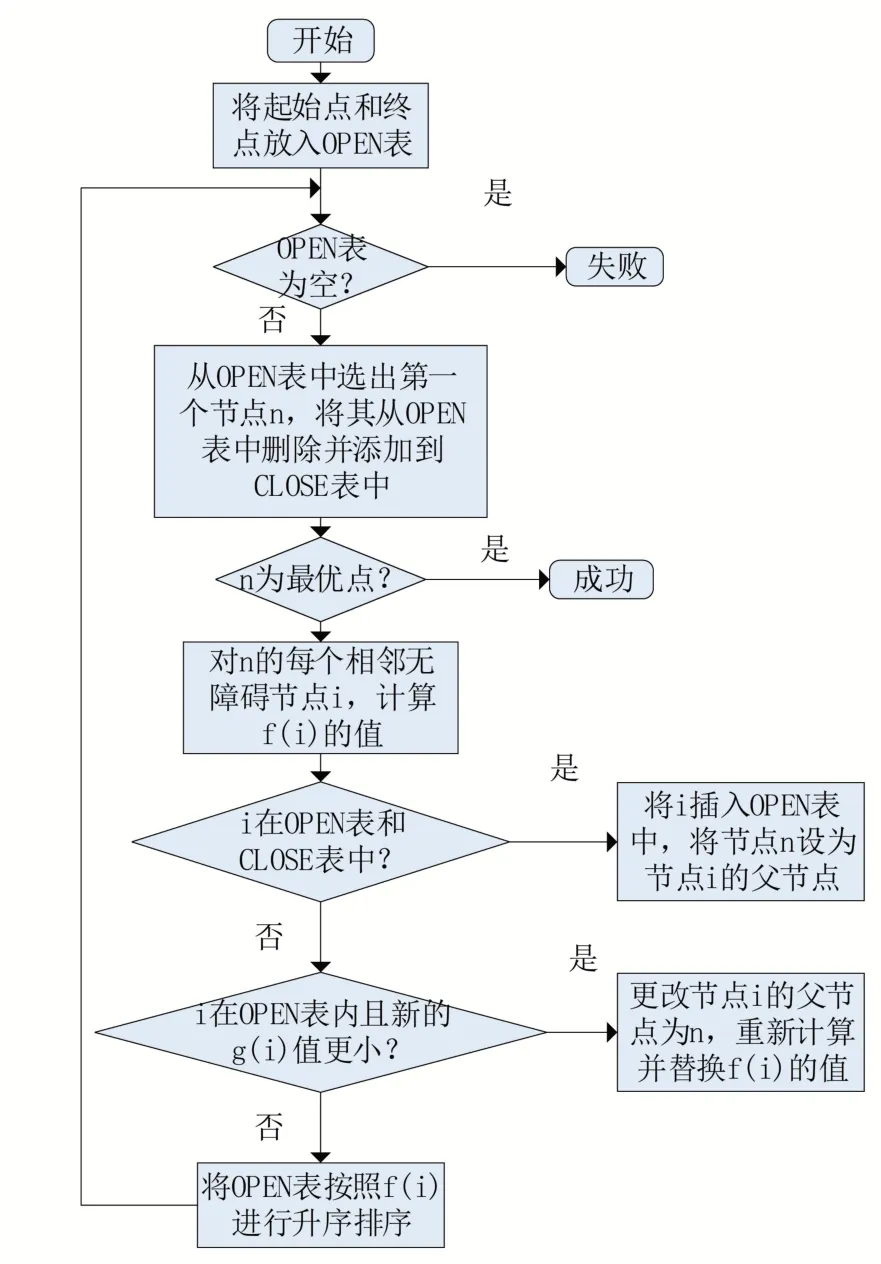
圖3 算法流程設計
步驟1:指定初始點和終點,創建OPEN 集與CLOSED 集,把兩點開始放入OPEN集, 經過路徑搜索出點并放入CLOSED集。
步驟2:判斷是否為最佳路徑點,若到達最優點,則把最優點放在CLOSED 集進行進一步的搜索,即執行步驟3,否則執行步驟4。
步驟3:確定搜索是否完成,所得路徑即為最優無人機運輸路徑,否則以當前點為起始繼續搜索。
步驟4:以步驟2 中最優節點為中心,向周圍進行大范圍搜索,不斷更新最優點放入OPEN集,繼續執行步驟2。
4 仿真分析
比較幾種算法的模擬效果,并驗證改進算法的優越性,進行仿真實驗,指定起始點為(1,2,0),終點為(8,6,2),基礎數據見表1。
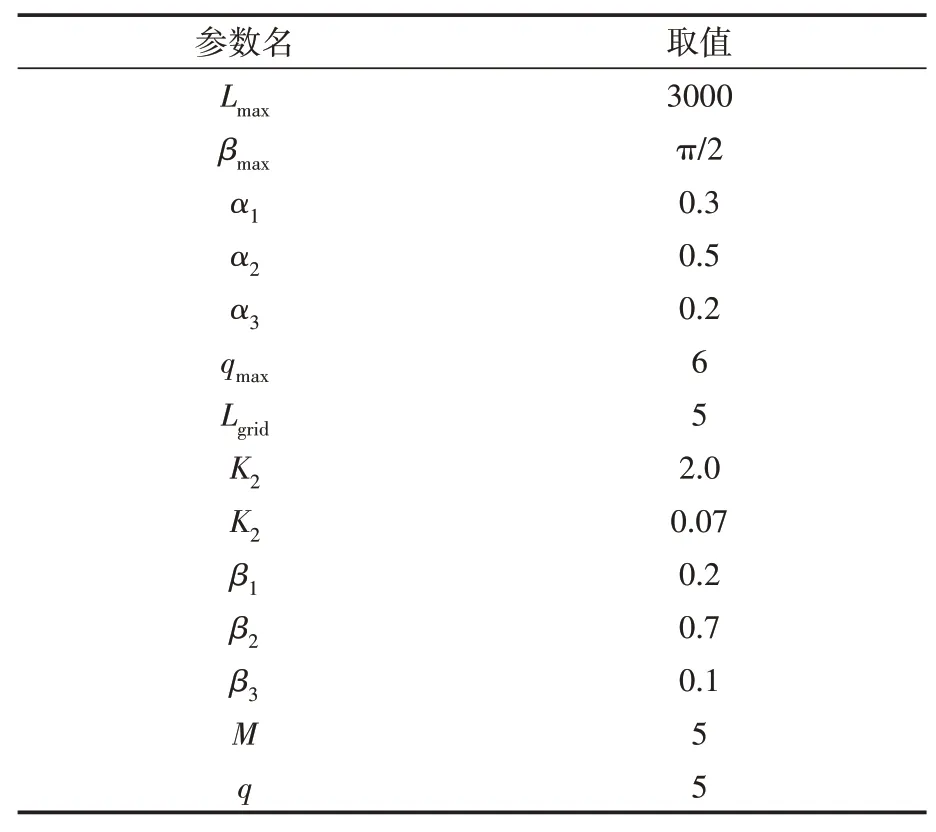
表1 參數取值
利用仿真平臺,分別對A*算法以及改進的A*算法進行仿真,結果如圖4所示。

圖4 A*算法和改進A*算法結果
從圖4 可以看出,經過優化處理過的A*算法所計算的路徑更短,也更加平滑,符合無人機現實運行情況。因此,本文使用的經過改進的A*算法更加優化了無人機運輸路徑。
為了增加對比,把RRT 算法的仿真結果也展現出來,如圖5所示。
從圖5 可以明顯看到,此算法所求路徑比A*算法要長。三種算法運算數據見表2。
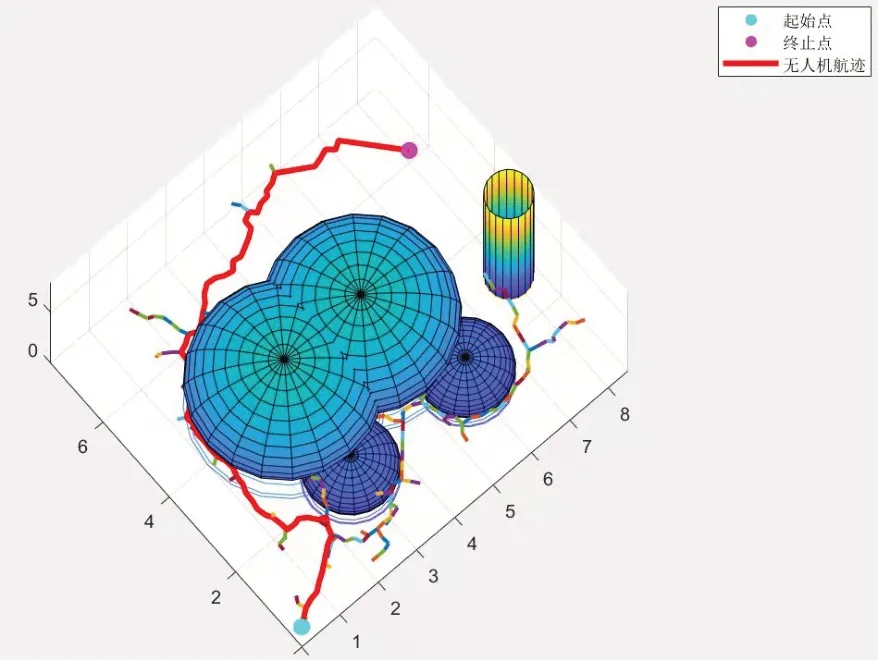
圖5 RRT算法結果
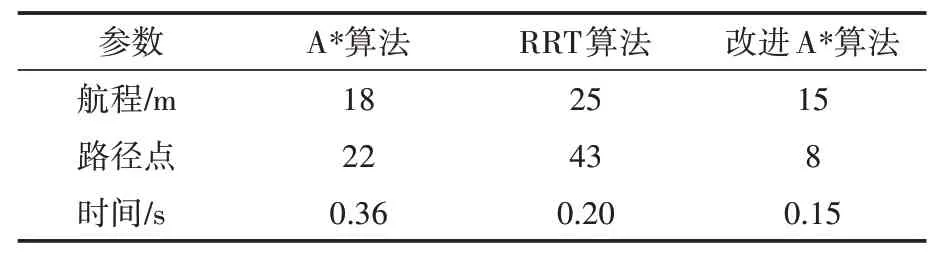
表2 幾種算法運算數據比較
從計算結果可以看出,A*算法可以更好地靠近最優路徑,而RRT 算法迭代時間更短;經過優化的A*算法實現雙向搜索之后,搜索效率也明顯提升,搜索到的路徑更加優化,本文改進的A*算法可以很好地解決物流無人機路徑規劃問題。
5 結語
本文利用柵格法建立物流無人機三維運行環境,比較分析A*算法和RRT 算法,針對兩者存在的缺陷進行雙向搜素、啟發函數等的改進。改進后的A*算法模擬效果明顯更好,而且運行時間更短,模擬出的飛行路徑更加平滑,因此,改進后的A*算法能夠很好地處理類似問題。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
物流技術與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
