基于PSCAD的鎖相環(huán)參數(shù)設計及仿真教學
2022-07-30 06:24:30汪娟娟吳秋媚文兆新劉岳坤
電氣電子教學學報 2022年3期
汪娟娟 吳秋媚 文兆新,2 劉岳坤
(1. 華南理工大學 電力學院, 廣州 510641)(2. 云南省電力調度控制中心, 昆明 650011)
“高壓直流輸電”課程是我國高等院校電氣工程專業(yè)的重要課程之一,主要講述高壓直流輸電系統(tǒng)的運行和控制原理,涉及電力電子、自動控制等多個學科,具有較強的理論性和工程實踐性[1]。其中,鎖相環(huán)為高壓直流控制系統(tǒng)提供相位基準[2-3],高壓直流控制系統(tǒng)的性能取決于鎖相環(huán)的鎖相性能。但在對鎖相環(huán)同步原理及參數(shù)設計課程內容進行教學的過程中,學生普遍反映該內容涉及的相關原理及概念比較抽象,導致對鎖相環(huán)參數(shù)設計的理解不深入。主要原因是課程教學中鎖相環(huán)的教學是基于連續(xù)系統(tǒng)展開,但實際運行中鎖相環(huán)是以數(shù)字方式傳遞和處理信息[4]。由于離散系統(tǒng)與連續(xù)系統(tǒng)具有一定的差異性,導致學生在將理論知識與實際系統(tǒng)相結合時,難以理解鎖相環(huán)原理及合理設計鎖相環(huán)參數(shù)。
在課堂教學的基礎上,使用實驗模擬和軟件仿真作為輔助教學有利于學生更容易理解課程知識的應用效果。但實驗模擬存在耗時長和實驗裝置資源有限等缺點,而軟件仿真可以彌補實驗模擬的不足,它具有簡單靈活、調試方便、直觀易懂、花費少等優(yōu)點,有助于學生更直觀地理解和掌握課程知識[5-6]。
結合實際教學經驗和學生所反映的問題,以一種工程用鎖相環(huán)為例,詳細介紹其離散化建模及其參數(shù)設計過程,在PSCAD/EMTDC軟件中構建該鎖相環(huán)的仿真模型并進行演示,直觀展示鎖相環(huán)參數(shù)設計效果,有利于學生了解鎖相環(huán)在實際運行中的大致情況,更好地掌握鎖相環(huán)原理及其參數(shù)設計過程。在進行課堂教學時,可同步進行仿真演示,強化學生對重點內容的理解,并布置仿真實驗操作作業(yè)和相關習題,要求學生動手操作并完成實驗報告,讓學生在這樣一種直接感性的學習模式中逐步鞏固所學知識,最后結合實驗報告及習題完成情況,及時了解到學生對所學內容的掌握情況。
1 教學過程設計
本文介紹的仿真教學設計旨在將鎖相環(huán)原理直觀地通過仿真程序和畫面展示出來,讓學生能夠把鎖相環(huán)各環(huán)節(jié)的數(shù)學關系和具體的物理波形聯(lián)系起來,進而全面地掌握其參數(shù)對其鎖相性能的影響。具體的仿真教學設計分為三個環(huán)節(jié):課堂理論教學與仿真演示、仿真實驗操作及習題、檢查實驗報告和習題情況。
1.1 課堂理論教學與課堂仿真演示
課堂教學除了對鎖相環(huán)工作原理、數(shù)學模型和參數(shù)設計進行介紹外,還可通過仿真軟件對鎖相環(huán)模型的搭建過程進行演示,對系統(tǒng)的運行結果和各個變量的波形進行觀察和對比分析,幫助學生深入理解教學內容。同時,可對仿真軟件的使用進行說明,指導學生如何自行搭建PSCAD電磁暫態(tài)模型和調整模型參數(shù)等,熟悉仿真軟件的使用,為后面的仿真實驗操作做準備。
1.2 仿真實驗操作及習題
根據(jù)高壓直流鎖相環(huán)的教學內容安排相關的仿真實驗內容,要求學生完成鎖相環(huán)的模型搭建,對鎖相環(huán)的參數(shù)整定進行仿真測試,并上交實驗報告,同時完成相應的習題內容,讓學生扎實地掌握并及時鞏固所學知識。鼓勵學生開拓思維大膽嘗試,進行多種條件下的仿真和模型搭建等操作,逐步提高學生的動手實踐能力。
1.3 檢查實驗報告和習題情況
檢查學生上交的實驗報告和習題完成情況,掌握學生的學習情況,及時發(fā)現(xiàn)問題,并給學生作進一步的答疑,讓學生明確如何在不同的應用場合選擇更為恰當?shù)逆i相環(huán)參數(shù),提高鎖相環(huán)教學的質量。
2 鎖相環(huán)工作原理


圖1 鎖相環(huán)結構圖
3 鎖相環(huán)離散數(shù)學模型
假定輸入電壓三相對稱,幅值為Vm、初相位為φ0,采樣時間間隔為Ts,則第k次采樣得到的三相電壓表達式為[8]
(1)
對該三相電壓進行Clark變換,得到靜止坐標下的兩相電壓

(2)
再經反正切計算環(huán)節(jié)得
(3)
為了對鎖相環(huán)進行參數(shù)設計,首先須對其進行建模。結合圖1,采用向前差分的方法[9]建立鎖相環(huán)離散Z域的數(shù)學模型,如圖2所示。圖中kp和ki分別為PI控制器的比例系數(shù)和積分系數(shù),T為積分環(huán)節(jié)的采樣周期。
圖2 鎖相環(huán)離散數(shù)學模型
4 PI控制器參數(shù)設計
PI控制器參數(shù)設計的好壞是決定鎖相環(huán)鎖相性能優(yōu)劣的關鍵。由圖2可得鎖相環(huán)的閉環(huán)傳遞函數(shù)及其誤差傳遞函數(shù)分別為

(4)

(5)
首先考慮保證系統(tǒng)穩(wěn)定時kp和ki應該滿足的基本約束。令z=(w+1)/(w-1),對G(z)的分母進行變換,得其閉環(huán)特征方程為

(6)
由勞斯判據(jù)可知,鎖相環(huán)系統(tǒng)保持穩(wěn)定的必要條件為:

(7)
選取采樣間隔Ts為0.625 ms,積分環(huán)節(jié)的采樣周期T為20 μs。由式(7)可得鎖相環(huán)穩(wěn)定運行時PI控制器參數(shù)的可行域,如圖3陰影部分所示。
圖3 參數(shù)可行域
其次,在基本約束前提下,進一步討論對系統(tǒng)提出動態(tài)響應等附加要求時,對kp和ki的附加約束。用ωc表示鎖相環(huán)的剪切頻率,則G(z)的開環(huán)傳遞函數(shù)及相位裕度PM可分別表示為[10]

(8)

(9)
根據(jù)自動控制原理,由式(6)可得
(10)

(11)
取阻尼比ζ=0.707,將式(10)代入式(11)得

(12)
由式(12)可得定阻尼比下參數(shù)kp和ki間的關系,如圖4所示。
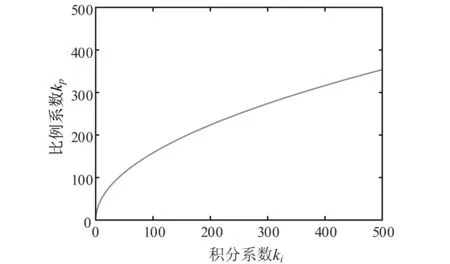
圖4 定阻尼比的參數(shù)關系
最后,再考慮鎖相環(huán)系統(tǒng)的穩(wěn)態(tài)誤差,對式(5)運用終值定理可得
(13)
當輸入信號發(fā)生θjump的相位跳變時,相位信號轉換到Z域后為θ(z)=z·θjump/(z-1),代入到公式(13)可得此時穩(wěn)態(tài)誤差為0;同理,當輸入信號發(fā)生ωjump的頻率變化時,相位信號轉換到Z域后為θ(z)=Tz·ωjump/(z-1)2,代入到公式(13)也可得穩(wěn)態(tài)誤差為0;而當輸入信號發(fā)生頻率以a為斜率的變化時,相位信號轉換到Z域后為θ(z)=T2z(z+1)a/(z-1)3/2,代入到公式(13)計算得穩(wěn)態(tài)誤差為a/ki。可見,在輸入信號發(fā)生相位跳變或頻率跳變時,均不存在穩(wěn)態(tài)誤差,而頻率發(fā)生斜坡變化時,其穩(wěn)態(tài)誤差與積分系數(shù)ki成反比,此結論與連續(xù)系統(tǒng)[11]的一致。
此外,當輸入信號混有諧波分量時,根據(jù)公式(1~3)可以知道,鎖相環(huán)路中起到主要作用的是換流母線電壓的基頻正序分量相位,但其諧波的衰減程度與環(huán)路的帶寬相關,因此,為保證鎖相環(huán)系統(tǒng)的抗諧波干擾能力,環(huán)路帶寬不能過寬,應充分考慮其動態(tài)響應要求和抗諧波干擾性能后折中選擇。
圖5具體展示了帶寬頻率fb和90%響應時間t90%關于比例系數(shù)的關系曲線,據(jù)此,可以根據(jù)使用環(huán)境的諧波情況和對動態(tài)響應的要求,結合設計原則選擇到合理的參數(shù)。
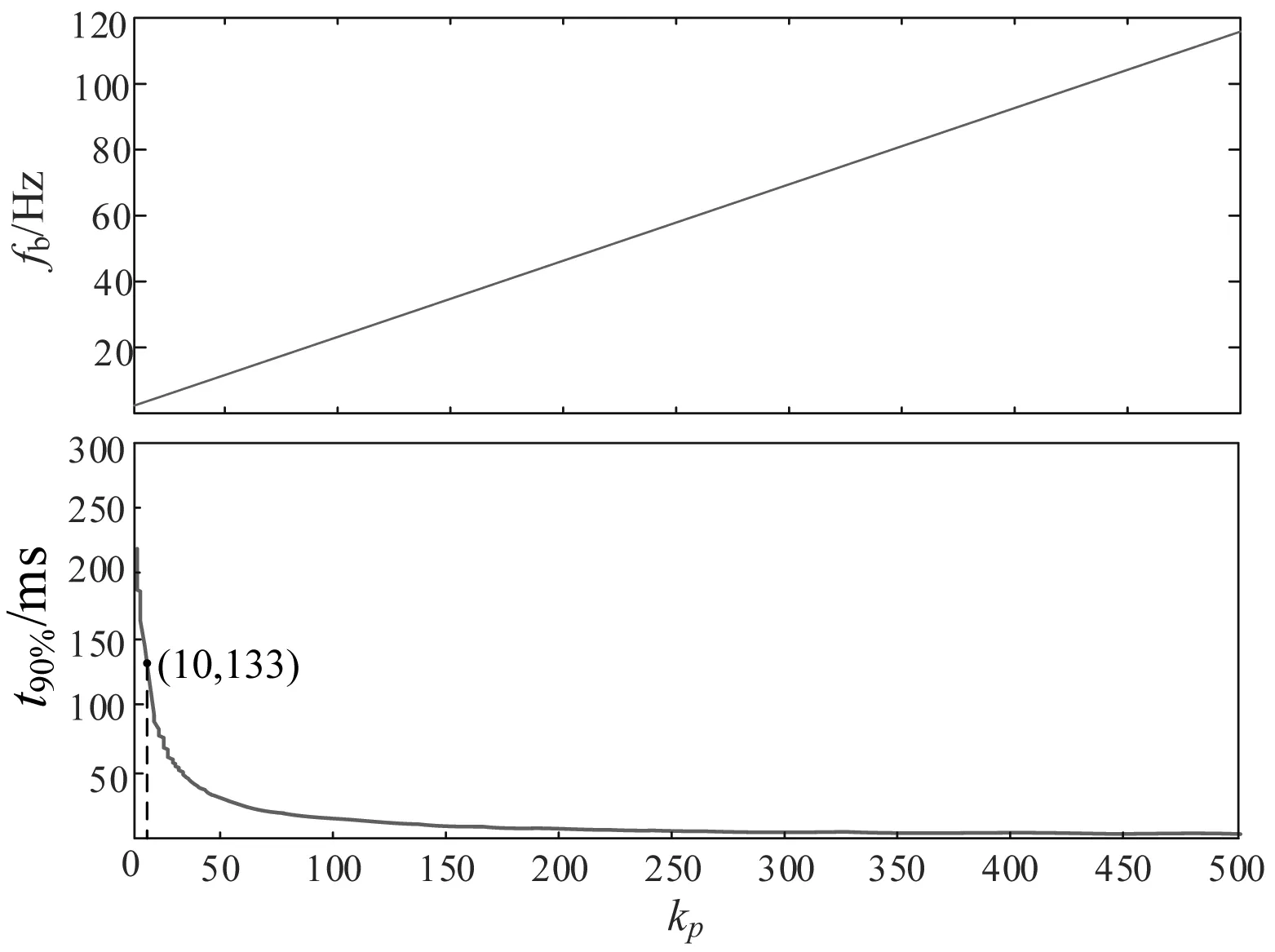
圖5 帶寬頻率和90%響應時間關于比例系數(shù)的關系曲線
綜上所述,鎖相環(huán)PI控制器參數(shù)設計原則可歸納為:
1)首先,參數(shù)需要滿足鎖相環(huán)系統(tǒng)穩(wěn)定的要求,即只能在圖3所示的參數(shù)可行域中選取。
2)其次,若鎖相環(huán)二階系統(tǒng)選取阻尼比為0.707,則在圖4所示的限定曲線上進行參數(shù)設計。
同時,為保證鎖相環(huán)同步相位的動態(tài)響應速度和較小的穩(wěn)態(tài)誤差,應選取較大的比例積分參數(shù)使得鎖相環(huán)環(huán)路帶寬增大。因此,通常選取kp不小于10,以保證響應時間不大于130 ms。
3)最后,為保證鎖相環(huán)系統(tǒng)的抗諧波干擾能力,其環(huán)路帶寬不能過寬。由于含量最大且干擾性最強的諧波分量頻率接近于二倍頻,此時,為盡可能地把干擾分量衰減掉,通常選取kp不大于500。
通常地,應充分考慮鎖相環(huán)動態(tài)響應要求和抗諧波干擾性能要求,根據(jù)實際情況在區(qū)間(10,500)中選取合理的kp值(對應地,在定阻尼比的條件下取得ki值),以滿足大部分工程應用的要求。
5 鎖相環(huán)仿真實例
5.1 鎖相環(huán)PSCAD模型的搭建
結合第1節(jié)介紹的鎖相環(huán)工作原理,在PSCAD/EMTDC中對各個環(huán)節(jié)進行建模,主要包括采樣元件、插值元件、Clark變換元件、“直角坐標轉極坐標”元件及鎖相環(huán)回路自定義模塊等,如圖6所示。

圖6 鎖相環(huán)的PSCAD電磁暫態(tài)模型
1)采樣及插值元件
鎖相環(huán)輸入信號的預處理主要為信號采樣。若采樣間隔Ts不是仿真步長的整數(shù)倍,還需要對采樣信號進行自定義插值處理。PSCAD軟件中的采樣和插值元件如圖7所示。

(a)

(b)圖7 采樣及插值元件
采樣元件用于儲存采樣時間間隔Ts的累加時間進度值t0=kTs,將其與仿真時間t(仿真步長tstep的累加時間)進行比較,當t≥t0時,輸出同步信號sync=1,作為使能信號,同時輸出線性插值的百分數(shù)frac,它的值為(t-t0)/tstep。
線性插值原理如圖8所示,其輸出信號為

圖8 線性插值原理

(14)
PSCAD軟件中的采樣及插值元件均需通過自定義來實現(xiàn)[12]。由于篇幅限制,此處僅簡單說明構建自定義元件的主要步驟[13]:選擇右擊畫布彈出菜單中的Create|Component,對自定義元件的名稱、文字描述和連接端口等進行設計,其中各端口的名稱、輸入輸出、維數(shù)和信號類型要與所需元件一致;創(chuàng)建完成后可進一步在Graphic畫布上對元件外形和端口根據(jù)需要進行編輯;在Parameters界面上可添加輸入信號,如固定的常數(shù)輸入;元件的算法可用Fortran語言在Script畫布上編寫。當算法程序與所需元件的原理對應時,所定義元件表現(xiàn)的外特性才正確,進而加以應用。詳細自定義元件的過程可參考文獻[13]。
2)Clark變換元件
Clark轉換矩陣為式(15),此過程可通過CSMF庫的四則運算元件或自定義轉換元件實現(xiàn)。
(15)
再運用自定義“直角坐標轉極坐標”元件的atan2(XB,XA)函數(shù)完成反正切相位計算,此時相位為[-π,π]的鋸齒波。當采樣元件輸出的同步信號sync=1時,鎖相環(huán)PI控制器開始工作。
3)鎖相環(huán)回路
鎖相環(huán)回路整合為自定義模塊,其輸入信號包括反正切計算的相位結果PHS、歸一化的電網頻率F、采樣間隔ta以及采樣元件的輸出信號frac和sync,分別由YAK端口輸出PD的比較結果、由PHI端口輸出鋸齒型相位。同時,其內部Parameters界面還需輸入PI控制器的參數(shù)kp和ki的值。
根據(jù)上述各元件的邏輯關系和離散數(shù)學模型的計算過程,用Fortran語言可以容易編寫并實現(xiàn)各個對應的自定義元件,進而得到圖5所示的鎖相環(huán)電磁暫態(tài)模型。
5.2 仿真測試
基于第4節(jié)所得的參數(shù)設計原則和5.1節(jié)所搭建的電磁暫態(tài)模型,為驗證本文提及的參數(shù)設計原則,以下將選擇不同帶寬下的鎖相環(huán)來仿真比較它們的動態(tài)響應性能、穩(wěn)態(tài)誤差情況和抗諧波干擾情況。本文選擇表1所示3組參數(shù)的鎖相環(huán)進行仿真,且各鎖相環(huán)系統(tǒng)的帶寬依次變寬,參數(shù)①為諧波環(huán)境下工程用的一組選值,參數(shù)②和③均是在圖4曲線上選取的,即保持了鎖相環(huán)系統(tǒng)的阻尼比為0.707,但后者帶寬更大。將鎖相環(huán)分別應用在以下3種工況下,對輸入信號V1、端口PHI輸出的鋸齒波、YAK輸出的鎖相誤差和對PHI輸出取余弦后的恢復電壓波形進行觀察,進而比較不同帶寬下的鎖相環(huán)動態(tài)響應性能、穩(wěn)態(tài)誤差情況和抗諧波干擾情況。

表1 鎖相環(huán)參數(shù)及仿真系統(tǒng)設置參數(shù)
3種工況設置:
(1) 1.0 s時,輸入的三相電壓相位同時跳變30°;
(2) 2.0~2.5 s期間,輸入信號的頻率緩慢斜坡減小0.5 Hz;
(3) 1.0 s時,15%的7次諧波和9%的9次諧波干擾,0.1 s后切除。
為觀察恢復電壓與輸入電壓的相位對比情況,將恢復電壓幅值設置為1.2 V。各鎖相環(huán)在工況(1)下的仿真結果如圖9所示,發(fā)生相位跳變時,鎖相環(huán)會有一定的響應延時,調節(jié)期間存在相位誤差,且積分系數(shù)增大,鎖相環(huán)的動態(tài)調節(jié)時間明顯縮短。可見,為保證鎖相環(huán)同步相位的動態(tài)響應速度,參數(shù)選取應使得鎖相環(huán)的帶寬較大,與參數(shù)設計原則(2)相符。
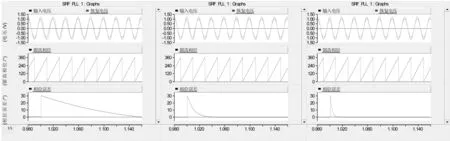
(a) 參數(shù)① (b)參數(shù)② (c)參數(shù)③圖9 工況(1)的三種鎖相環(huán)仿真結果
為驗證積分系數(shù)值對鎖相環(huán)系統(tǒng)穩(wěn)態(tài)誤差的影響,針對參數(shù)①和③鎖相環(huán)在工況(2)下進行了仿真對比,仿真結果如圖9(a)(b)所示,當積分系數(shù)為50時,相位誤差達到6°左右,而積分系數(shù)選取較大時(選值為500),相位誤差減小至-0.4°附近,可以忽略,與前面的參數(shù)設計原則(2)一致,即參數(shù)選取較大的積分系數(shù)值能夠減小鎖相環(huán)系統(tǒng)穩(wěn)態(tài)誤差。考慮到電網頻率不會突變,當頻率發(fā)生斜坡變化時,可取積分系數(shù)ki大于500,使得誤差小于0.5°,同步效果不會受到太大影響。
圖10(c)為參數(shù)①鎖相環(huán)在工況(3)下的仿真結果,由于搭建的簡化鎖相環(huán)沒有環(huán)前濾波環(huán)節(jié),諧波干擾后,鑒相器的輸出也是波動的,并不能表示輸入信號的基頻正序相位與檢測相位的誤差情況;由恢復電壓和輸入電壓的對比波形可以看出,受到諧波干擾后,鎖相環(huán)在0.02 s后的恢復電壓過零點時刻與輸入電壓基本一致,即小帶寬的鎖相環(huán)①在諧波干擾的工況下仍具有鎖相能力,驗證了參數(shù)設計原則(3)。

(a) 參數(shù)①鎖相環(huán)的工況(2)仿真結果 (b)參數(shù)③鎖相環(huán)的工況(2)仿真結果 (c)參數(shù)①鎖相環(huán)的工況(3)仿真結果圖10 工況(2)(3)的仿真結果
結合第4節(jié)的參數(shù)設計原則和上述基于PSCAD的仿真驗證,能夠加深學生對鎖相環(huán)參數(shù)設計原則的理解。設計多種不同的應用場合的實驗操作作業(yè),如對動態(tài)響應要求更高或多諧波的環(huán)境時,如何選定鎖相環(huán)的參數(shù),進而鞏固學生對鎖相環(huán)參數(shù)設計原則的掌握,同時讓學生能夠將理論貼近實際地進行操作。
6 結語
基于PSCAD/EMTDC軟件詳細介紹了離散鎖相環(huán)的建模及其控制器參數(shù)的設計,暫態(tài)仿真驗證了模型和參數(shù)設計方法的正確性。對學生在學習鎖相環(huán)相關內容的過程中具有以下指導作用:
(1)通過在PSCAD中建立鎖相環(huán)電磁暫態(tài)模型,可加深學生對鎖相環(huán)原理的理解;通過對其控制器不同參數(shù)組合進行仿真測試,可直觀展現(xiàn)鎖相環(huán)參數(shù)對鎖相性能的影響,這對提高課程教學質量大有裨益。
(2)利用仿真軟件易于實現(xiàn)離散采樣、插值等算法和繪制數(shù)據(jù)圖形的優(yōu)勢,幫助學生更深刻地理解并掌握課程知識,從而提高學生的學習效率。
(3)通過搭建電磁暫態(tài)模型的自定義模塊以及應用各元件庫元件,學生能夠了解并應用當前編程及仿真領域內的主流軟件,有利于激發(fā)學生深入探索理論知識的興趣,拓寬應用實踐技術的視野,提高學生的實踐動手能力。
(4)介紹的鎖相環(huán)是離散實現(xiàn)的,更貼合實際工程的應用。對其進行物理模型的搭建和對仿真結果進行對比分析,能更直觀更完整,進而有效避免所授知識的寬泛化和概念化的現(xiàn)象。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
