基于UWB 技術的車輛定位系統設計與實現
2022-07-29 06:54:44張雨桐劉永艷
智能計算機與應用 2022年8期
張雨桐,劉永艷,楊 凡,樂 洋,4
(1 南京郵電大學 軟件學院,南京 210023;2 南京郵電大學 通信與信息工程學院,南京 210003;3 南京郵電大學地理與生物信息學院,南京 210023;4 南京郵電大學 江蘇省智慧健康大數據分析與位置服務工程實驗室,南京 210023)
0 引言
近年來,隨著經濟的發展,汽車越來越多,停車場車位需求激增。然而,由于城市建設土地資源有限,無法適應車輛的增長速度。面對這種狀況,現如今的停車場管理系統在一些方面則暴露出很多問題與不足。如:車主無法快速找到停車位或返回尋車、全球導航衛星系統(Global Navigation Satellite System,GNSS)信號在室內定位的不穩定性等。這些問題的存在使泊車者不但占用場內出入主車道資源,甚至會出現停車場內交通擁堵。
為了解決傳統停車場管理系統中的現有弊端,許多學者從停車場定位角度做了一定研究。如:張秋艷等人設計了基于RFID 智能停車場管理系統,結合其它模塊實現人機交互,在低成本和運行穩定上占有較大優勢。徐丹等人提出了基于ZigBee技術的停車定位系統,通過相關技術,將信息聯系起來可以實現多個停車場的互通,但其定位精度較低,容易受到周圍環境的影響。陳曉玉利用WiFi 定位技術,實現地下停車場的智能管理,通過研究相關算法,提高車輛定位的實時性,但在定位精度方面還有待進一步優化與研究。張雪采用藍牙定位技術實現了車位的定位與反向找尋功能,但定位的準確性卻仍需繼續提升。
現存的室內定位技術包括RFID 定位技術、藍牙定位技術、ZigBee 定位技術、超寬帶技術等。其中,RFID 定位技術受室內外因素干擾性較大;藍牙定位技術受噪聲干擾性大,定位距離短;ZigBee定位技術卻存在室內精度低等缺點;而超寬帶(Ultra Wideband,UWB)定位技術是一種基于UWB脈沖信號的無載波無線通信技術,具有傳輸速率高、發射功率低、定位精度高等特點。
基于UWB 的無線室內定位系統,具有較高的定位精度及實時跟蹤性能,能夠很好地滿足用戶的室內定位需求。目前,該技術在無線室內定位領域具有十分廣闊的應用前景和研究價值。因此,本文將利用UWB 定位技術對室內車輛進行定位,幫助車主在取車時能快速定位到車輛的位置,提高便利性。
1 系統設計
1.1 總體架構
基于UWB 定位技術的地下停車場車輛定位系統主要由硬件模塊、服務器端、移動端APP 三部分組成,總體架構如圖1 所示。由圖1 可知,對系統結構中各個組成部分的功能設計原理擬展開研究分述如下。
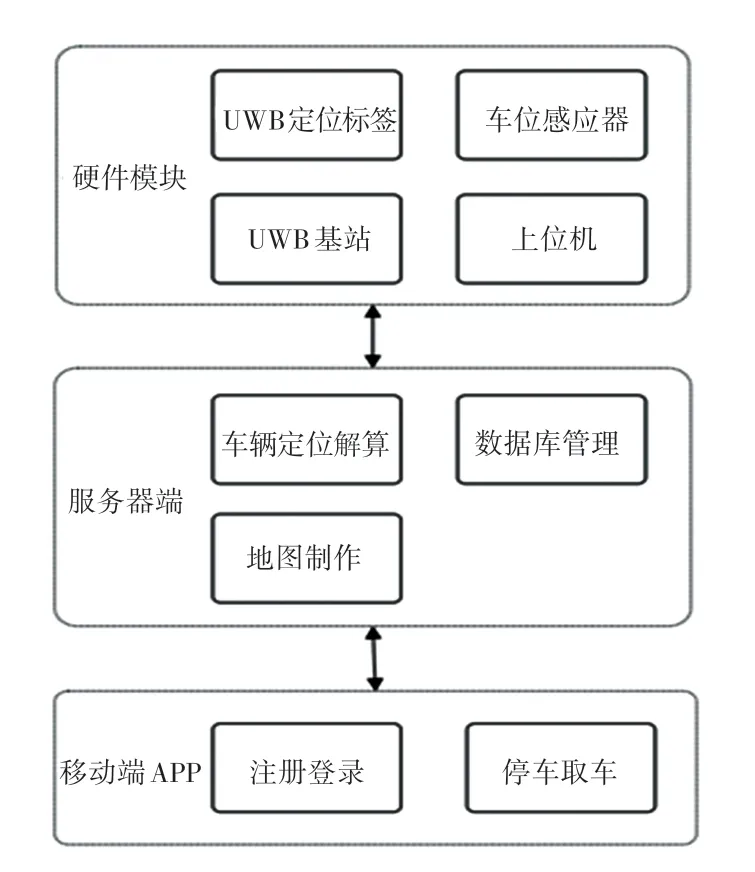
圖1 系統總體架構圖Fig.1 Overall system architecture
(1)硬件模塊。主要由UWB 定位標簽、UWB基站、上位機以及車位感應器等構成。當帶有標簽的車輛進入地下停車場時,標簽與停車場內基站進行通信傳輸;UWB 基站將該信號和對應信號的時間傳輸給上位機。
(2)服務器端。對上位機接收的數據進行解算,得到車輛位置信息;數據庫主要存儲車輛的位置及其用戶信息,為后續尋車引導做準備;室內停車場地圖的制作,是實現地圖的基本瀏覽、縮放、定位查詢和路徑規劃等功能的關鍵。
(3)移動端APP。主要包括停車導航與反向尋車導航等功能。用戶登錄或注冊此終端后,用戶信息將存入數據庫系統內,以供信息查詢。根據用戶輸入的地點名稱、車牌號等信息,顯示其停車時間與位置信息,為用戶規劃最近的車位路線。APP 可直接進行車位的查詢,并且為用戶實施導航,方便用戶尋車。
1.2 UWB 硬件設計
1.2.1 設備選型
DW1000 芯片是Decawave 公司推出的超寬帶定位芯片,該模塊集成了內置天線及相應的射頻電路和時鐘電路,功耗低,輸出頻率為100 Hz。DW1000 是通過更新中斷寄存器中的中斷標志位來通知主控芯片各類事件的發生,可用來雙向測距和定位。因此,本文選擇DW1000 芯片作為UWB 定位系統中的基站與標簽。
1.2.2 UWB 室內定位系統組成
UWB 定位系統包括待定位目標節點、基站和上位機解算平臺。總地來說,其定位是利用標簽向基站發送UWB 脈沖信號,完成測距交互,得到標簽與各基站的距離信息、并送至上位機;上位機利用相關定位算法解算標簽相對位置坐標,實現定位功能。UWB 定位系統基本功能示意如圖2 所示,定位系統工作原理如圖3 所示。由圖3 可知,這里將對各重點組成的設計原理給出剖析論述如下。
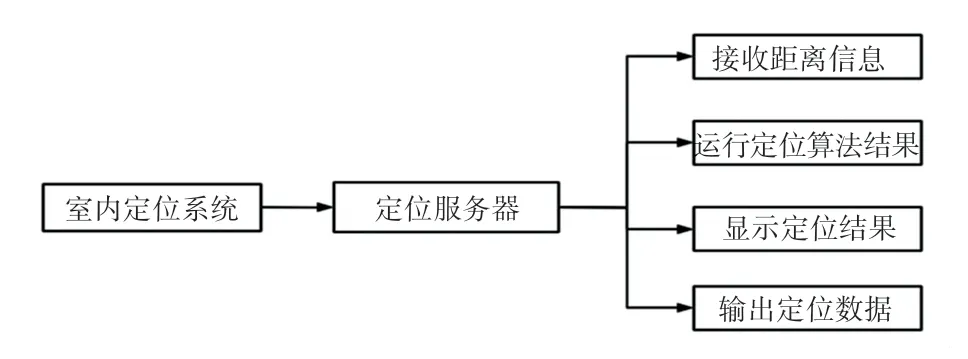
圖2 定位系統功能示意圖Fig.2 Schematic diagram of the positioning system functions
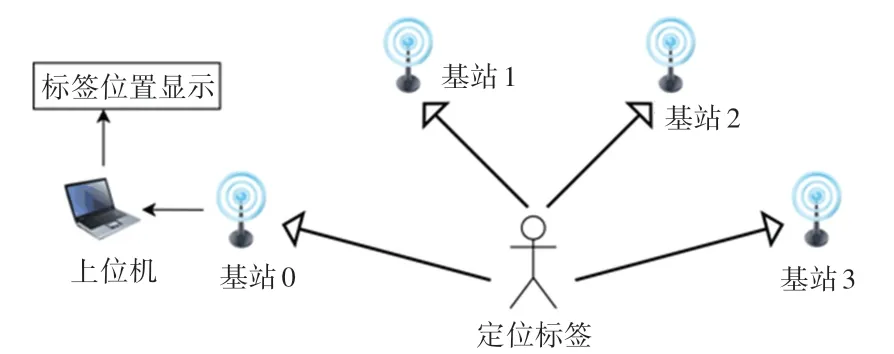
圖3 UWB 定位系統工作原理圖Fig.3 Working principle diagram of UWB positioning system
(1)UWB 基站:UWB 基站作為室內定位系統的信標節點,通過在室內空間部署基站,覆蓋整個定位區域。其中,基站0 作為主基站通過數據線與上位機進行信息交互。
(2)UWB 定位標簽:可以與各基站進行通信的節點,基站與定位標簽之間、基站與基站之間均通過UWB 信號進行信息交互。
(3)上位機解算平臺:各個基站將距離信息全部傳送給主基站0,上位機根據數據線獲得基站0中的測距信息,對定位標簽通過三邊定位法進行定位,而后再將定位標簽的坐標信息顯示出來。
因此,本項目將UWB 定位標簽嵌于車輛外殼,當泊車者進入停車場時,系統可以對該車輛做實時定位,并向泊車者提供最優的停車方案;當車主返回停車場,尋找場內泊車的時候,通過手機里面的定位系統,經后臺整合計算,轉換為基于UWB 定位系統下的坐標,再根據車輛的歷史定位信息,即可幫助車主快速定位泊車的位置,提高取車效率。
1.3 移動端APP
本系統設想的實體為手機應用程序,該應用程序集成了停車場管理、數據統計、系統管理、自主泊車六大應用模塊,反向尋車模塊為系統擴展模塊,授權用戶可以通過該管理平臺進行系統管理和信息查看。
1.3.1 應用程序功能設計
移動端主要功能如下:
(1)用戶注冊/登錄。用戶可在終端注冊賬號,注冊成功后即可登錄進入本系統。
(2)地圖控制。終端可顯示地圖,并可對地圖進行放大、縮小和移動。
(3)實時定位。用戶所在位置可在地圖上標注,并給出詳細的位置信息。
(4)停車導航。根據用戶所在位置,為用戶提供附近停車場地址和路線。若在室外能為用戶找到合適的停車地,而在室內則為用戶規劃最近的車位路線。
(5)信息查詢。根據用戶輸入的地點名稱,顯示其停車時間與位置信息。
(6)反向尋車導航。用戶通過程序可直接查詢車位,并為用戶進行導航,方便用戶尋車。
無論是針對路邊、或者室內停車場,用戶均可使用移動終端軟件,通過無線通信技術將數據傳輸至業務服務器,從而向業務服務器發送功能請求、如最短/最優路徑查詢請求等。服務器收到該請求后,執行業務邏輯,并將處理結果反饋給用戶客戶端,完成響應。
1.3.2 APP 開發平臺
本次系統主要在MUI 平臺進行APP 的開發。終端結合了ArcMap 等地圖服務,將數據及時傳送到基于位置服務(Location Based Services,LBS)的管理平臺,并與用戶通信,提供定位導航、找車尋車等服務。在地圖服務類開發方面,MUI 平臺的地圖接口包含了一系列與地圖開發功能相關的類,提供了許多地圖操作的功能。此外,該數據庫是在MySQL中進行開發,在MUI 平臺上使用SqlConnection 對象連接數據庫。對于SQL 語句的執行與存儲調用,可以建立SqlCommand 對象,以進行有效的溝通和管理。用戶端設計框架如圖4 所示。
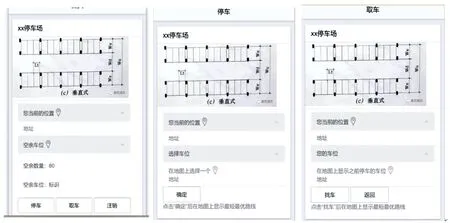
圖4 首頁、停車、取車設計圖Fig.4 Home page,parking and pick-up design drawing
1.4 服務器端
設計內容包括車輛定位解算模塊、標準地圖的制作、數據庫設計等模塊。這里,將對此進行闡釋詳述如下。
1.4.1 車輛定位解算模塊
(1)定位數據獲取及處理。系統采用UWB 室內定位技術,通過用戶車輛安裝的定位標簽與附近基站的通信進行定位,從而獲得當前位置。對于LBS 管理模塊,開發人員可利用平臺的定位服務,鏈接UWB 上位機的數據來獲取用戶的位置信息。
(2)坐標轉換。由于UWB 設備架設在地下停車場,用戶反向尋車時并不處于UWB 設備所建立的相對坐標系內。為了讓用戶手機接收到GNSS 信號,更直觀地在手機上看到自己和車輛所在位置,將GNSS 衛星所測的室外大地坐標系與UWB 的相對坐標進行轉換。本文將UWB 技術與GNSS 衛星系統結合起來,在對車主進行定位時,充分發揮手機里GNSS 定位系統的作用。對于GNSS 衛星定位系統來講,其獲取的原始數據為大地坐標參數,而后續參與運算的數據應為地面坐標參數,故在此之前應做數據轉換處理。將GNSS 定位數據轉換為地面坐標數據之后,才可以與UWB 技術獲取的測量數據進行整合。
1.4.2 標準地圖制作
室內停車場地圖的制作是實現地圖的基本瀏覽、縮放、定位查詢和路徑規劃等功能的關鍵步驟。系統采用ArcMap 畫圖工具,通過建立GDB 數據庫,制作美觀易懂的停車場電子地圖。通過在終端上顯示停車場平面圖,實現人機交互的可視化,并在此圖上標記人與車的位置信息和路徑導航。停車場地圖制作流程如圖5 所示。
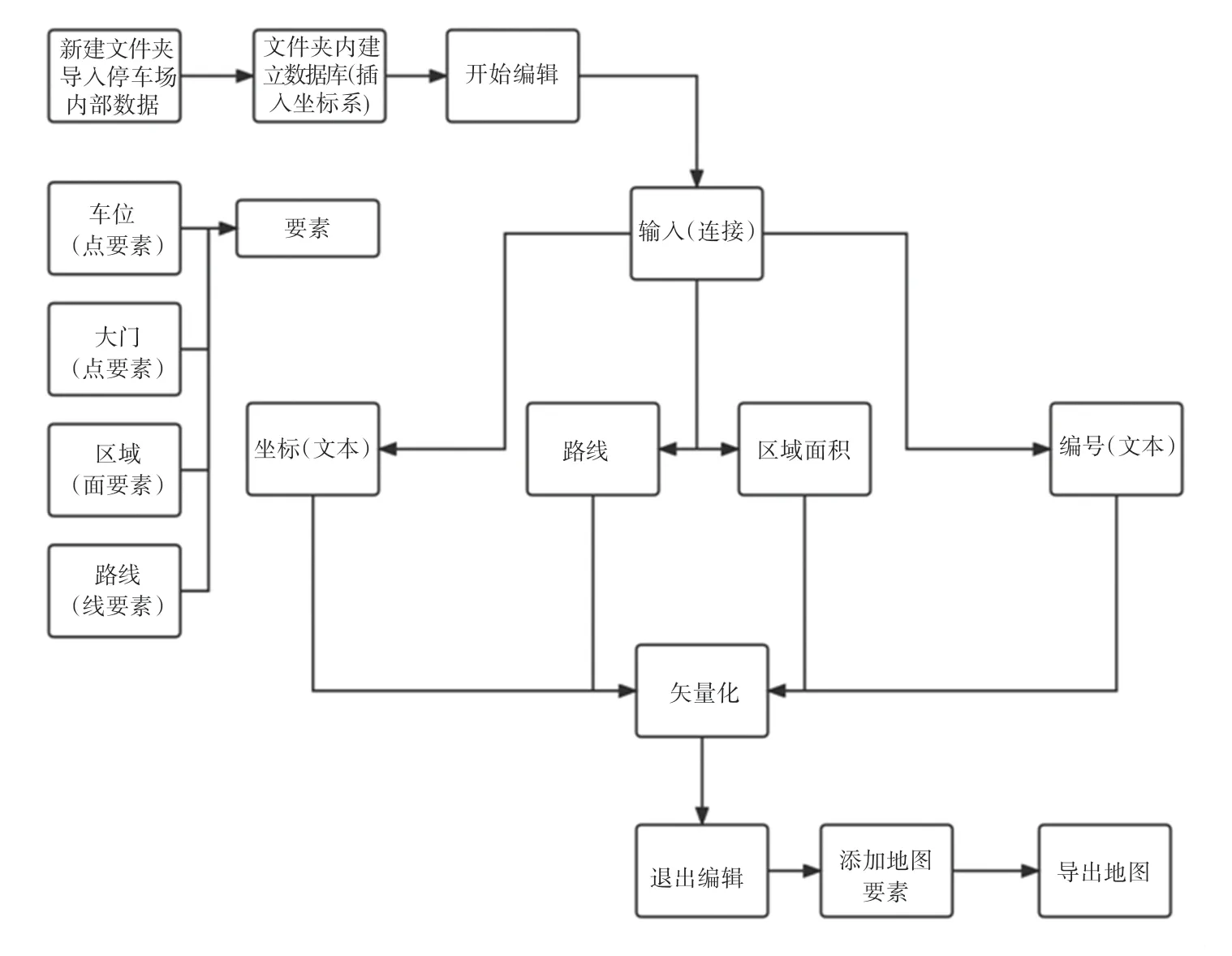
圖5 停車場地圖制作流程Fig.5 Map production process of the parking lot
1.4.3 數據庫設計
在車主停車后,完成注冊、進入系統,將用戶信息與車輛位置信息一同存于數據庫中,建立以用戶信息為索引的車輛信息數據庫。
對于數據庫邏輯結構的設計,SQL 數據庫中可以通過新建數據表并設定數據結構來建立適用于本系統的數據邏輯結構。數據表中,除了基本的管理信息表以外,還增加了諸如用戶信息表、車輛位置信息等數據表。通過對數據庫的操作,來管理用戶信息、處理位置信息數據及用戶請求信息等。此處主要包括著存儲用戶信息、實時位置顯示、最短最優路徑的查找等功能模塊。
2 實驗測試
2.1 靜態標簽測試實驗
靜態標簽定位實驗目的,是為了測試系統的定位準確度,有助于動態實驗的運行完成。
測試實驗地點選擇在南京郵電大學南操場羽毛球場地,在3.48 m*3.48 m 的矩形范圍內進行,實驗場景如圖6 所示。實驗前先固定好基站0、1、2 的位置,上位機與基站0 連接并處于基站0 的位置。實驗前設置好相對坐標系以及各基站位置,以基站0 為原點、基站1 為軸、基站2 為軸。位于矩形的3 個頂點處標簽是可移動的,并在上位機中設定基站的坐標,建立坐標系。標簽需要在基站信號范圍內移動,同時基站標簽處于同一水平高度,且基站標簽之間并無遮擋物。
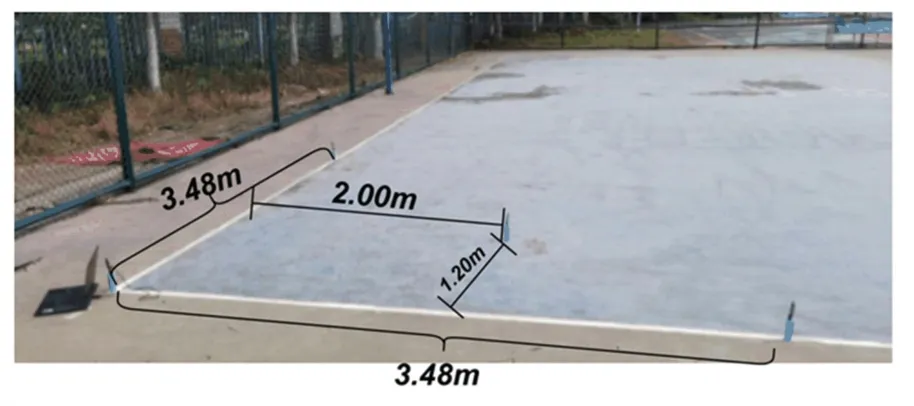
圖6 各節點實際布局Fig.6 Actual layout of each node
將標簽放置到指定位置,相對坐標為(2,1.2)。由于遮擋信號以及其它不穩定因素,導致上位機數據不穩定,待數據穩定后記錄測量數據為(2.058,1.218)。將測量數據與真實數據相比較,至此得到該設備的精確定位。
實驗表明,在無遮擋物且同一水平高度的情況下,可以顯示標簽相對坐標點及標簽到各基站的距離。將真實數據導入Matlab 作圖、且與測量數據做比較,對比結果如圖7 所示。由此可見,測量數據與真實數據基本一致,說明該系統的定位準確度是真實可靠的。
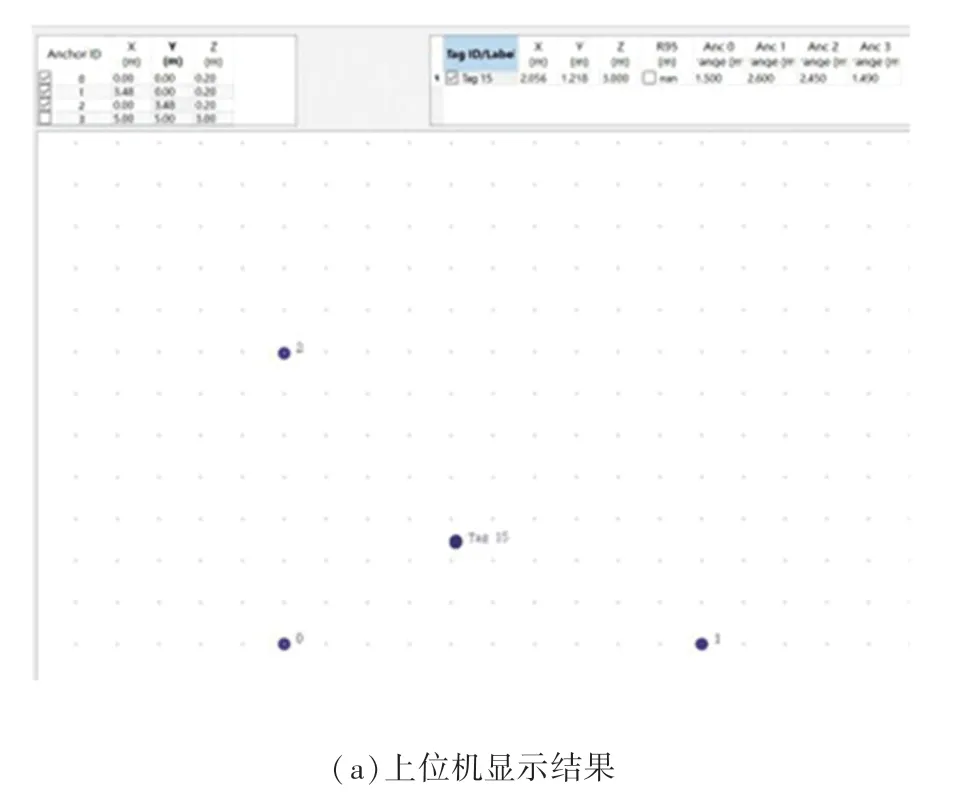
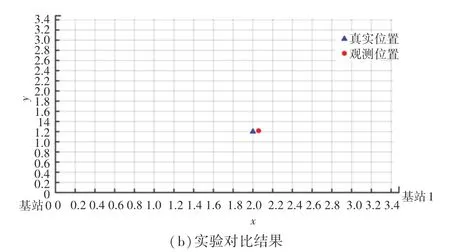
圖7 觀測與真實坐標對比結果Fig.7 Comparison results between observation and real position
2.2 動態軌跡測試實驗
本系統設計旨在為用戶提供地下停車場的實時位置,以及規劃停車、取車的最優路徑服務。為驗證UWB 技術在室內實時定位的可行性,在靜態標簽測試實驗后,進行了動態軌跡測試實驗。實驗場地選擇在南京郵電大學學科樓地下停車場5.5 m*13 m的矩形范圍內進行,實驗場景平面示意如圖8 所示。實驗前設置好相對坐標系以及各基站位置,以基站0 為原點、基站1 為軸、基站2 為軸,上位機與基站0 連接。標簽需要在基站信號范圍內移動,且與基站標簽處于同一水平高度,基站標簽之間無遮擋物。

圖8 實驗場景平面示意圖Fig.8 Schematic diagram of the experimental scene
標簽以及各基站上電后,一名工作人員手持標簽且與其它基站保持在同一水平位置,按照從基站2 位置到基站0 與基站1 中間位置,再回到基站2位置路徑移動。上位機與基站0 連接,得到標簽與各基站間距離,并解算出標簽在相對坐標系下的坐標,通過Matlab 得到的最終實驗結果軌跡如圖9 所示。由于本實驗設置為三基站二維空間,實驗過程中標簽要盡量和基站離地面的高度一致。
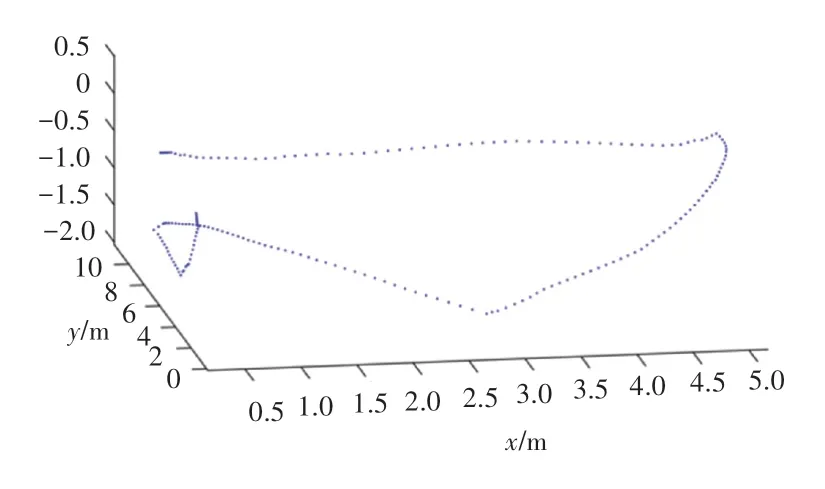
圖9 實驗結果軌跡圖Fig.9 Trajectory of experimental results
由實驗結果可見,標簽挪動時,軌跡與實際路線相接近,說明UWB 技術可實現室內的實時定位,證明了本系統設計的可行性。
3 結束語
本文針對人們進入地下停車場泊車與返回取車時無法快速和準確地找到車位的問題,提出了基于UWB 定位技術的車輛定位系統的設計方案,即通過UWB 室內定位技術實現車輛定位與車位導航。經過對其進行實地靜態與動態測試實驗,所得結果表明,定位精度良好,且隨著標簽的移動,上位機能夠實時地顯示標簽的相對位置,驗證了UWB 技術在室內實時定位的可行性。本系統有廣泛的市場應用前景。在UWB 室內定位技術基礎上,與移動終端相結合,為用戶提供了室內停車場引導服務,進一步擴大了地圖導航的服務范圍,進而由室外大場景地點導航拓展到室內定位點導航領域中。
然而定位的高精度是研究的關鍵,目前看來本系統在室內定位精度有待提高,且定位范圍在百米內,定位區域較小。在今后的工作中,考慮在上位機中加入卡爾曼濾波算法來減小測距誤差,并嘗試切換到更大、更復雜的場景中進行實驗。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中華手工(2017年2期)2017-06-06 23:00:31
商用汽車(2016年11期)2016-12-19 01:20:16
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創業家(2015年5期)2015-02-27 07:53:25
中外會展(2014年4期)2014-11-27 07:46:46
