基于CPLD的直流無刷電機控制系統(tǒng)設(shè)計
2022-07-28 07:43:40黃朝麗
導(dǎo)航與控制 2022年2期
黃朝麗,王 晴,馬 俊
(陜西航天時代導(dǎo)航設(shè)備有限公司,寶雞 721006)
0 引言
隨著科學(xué)技術(shù)和工業(yè)化的快速發(fā)展,工業(yè)自動化程度日益加深,電機的應(yīng)用領(lǐng)域不斷擴大,電力電子技術(shù)、微機控制技術(shù)和控制理論的發(fā)展更促進了電機調(diào)速技術(shù)的發(fā)展。隨著新的電力電子器件、高性能的數(shù)字集成電路以及先進的控制理論的應(yīng)用[1],控制部件功能日益完善,所需的控制器件數(shù)目越來越少,控制器的可靠性提高而成本日益降低,從而使得直流無刷電機不再局限于傳統(tǒng)的工業(yè)應(yīng)用領(lǐng)域[2],而逐漸向機器人、數(shù)控機床、雷達和各種軍用武器隨動系統(tǒng)等領(lǐng)域拓展。然而,目前直流無刷電機控制方法大多采用單片機等嵌入式軟件方式來實現(xiàn),由于軟件可靠性等問題,已不能完全滿足系統(tǒng)復(fù)雜環(huán)境的使用要求。
20世紀(jì)80年代以來,國內(nèi)外對直流無刷電機的研究主要轉(zhuǎn)移到電子換向、稀土永磁材料以及智能控制三個方面,試圖來抑制直流無刷電機的轉(zhuǎn)矩波動[3]。除此之外,隨著電機及驅(qū)動系統(tǒng)的發(fā)展,控制系統(tǒng)趨于智能化和數(shù)字化,使得許多較復(fù)雜的控制技術(shù)得以實現(xiàn),又進一步推動了直流無刷電機在各個領(lǐng)域的更好應(yīng)用[4]。
針對某型舵機系統(tǒng)在整機使用環(huán)境中存在大功率發(fā)射瞬間的干擾信號,以往嵌入式軟件設(shè)計會因強干擾信號而導(dǎo)致軟件跑飛等問題,本文設(shè)計了一種基于復(fù)雜可編程邏輯器件(Complex Programmable Logic Device,CPLD)的直流無刷電機控制系統(tǒng)。利用CPLD的硬件可編程和實現(xiàn)邏輯運算方便的特點,用一片CPLD代替原有十幾片邏輯門和部分模擬電路[5],采用VHDL語言編程實現(xiàn)電機的邏輯控制[6],不但簡化了硬件電路設(shè)計,還可實現(xiàn)在線編程,方便了系統(tǒng)參數(shù)的調(diào)試。
1 控制系統(tǒng)總體設(shè)計
1.1 系統(tǒng)總體方案設(shè)計
控制系統(tǒng)的總體方案為:根據(jù)給出的調(diào)速碼、方向信號以及限位開關(guān)信號并結(jié)合電機轉(zhuǎn)子位置傳感器的輸出信號,經(jīng)CPLD進行邏輯綜合處理后,產(chǎn)生PWM調(diào)寬波和邏輯控制信號,再通過驅(qū)動放大電路進行功率放大,向功率開關(guān)管提供使其飽和導(dǎo)通和可靠關(guān)斷的驅(qū)動信號,驅(qū)動電機按照規(guī)定的轉(zhuǎn)速和極性旋轉(zhuǎn),最終實現(xiàn)電機的閉環(huán)控制[7-8]。系統(tǒng)總體設(shè)計包括硬件電路設(shè)計和軟件設(shè)計兩大部分,控制系統(tǒng)原理框圖如圖1所示。
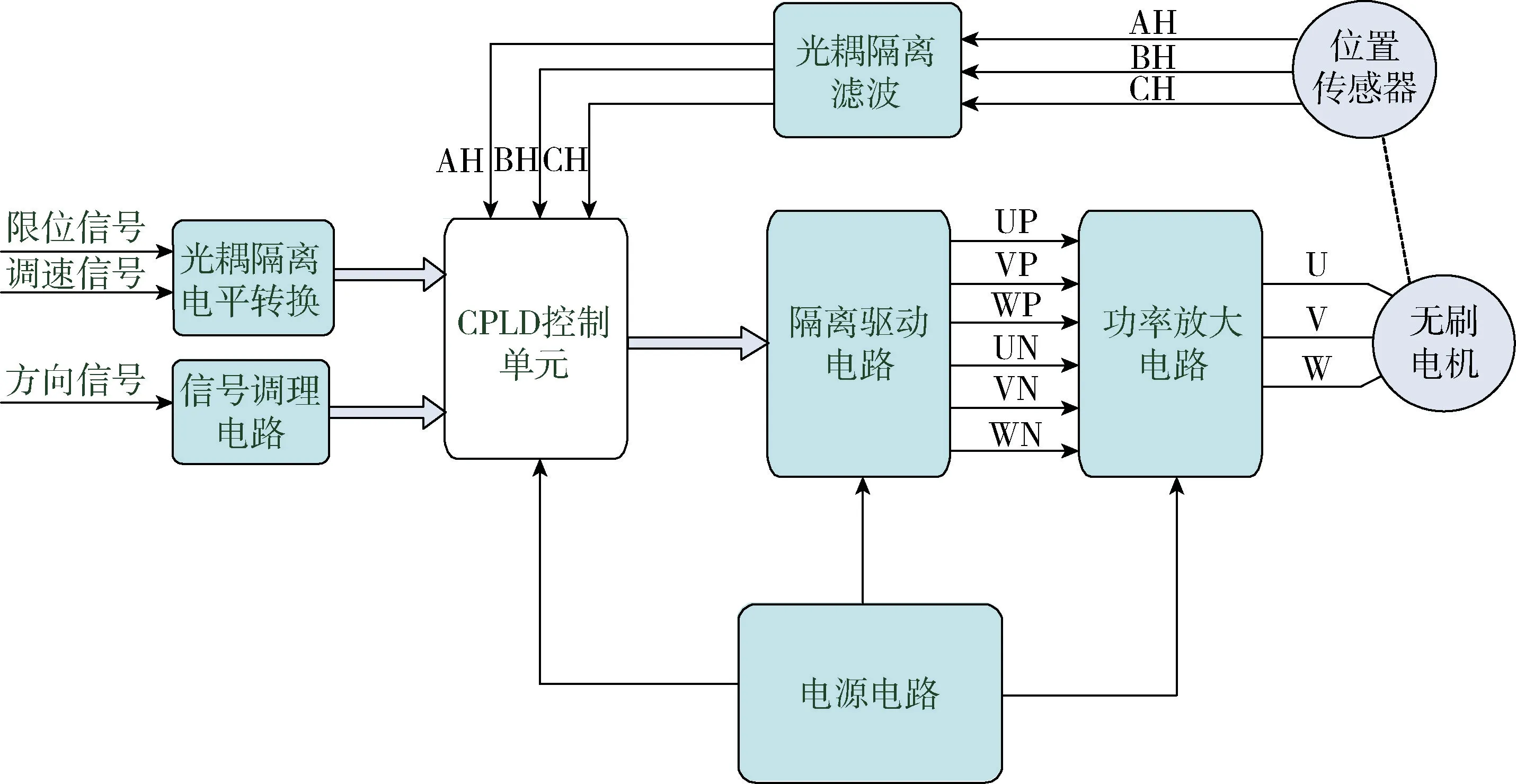
圖1 控制系統(tǒng)原理框圖Fig.1 Principle block diagram of control system
1.2 直流無刷電機驅(qū)動原理
直流無刷電機是由電機本體、轉(zhuǎn)子位置傳感器和電子換相電路組成的一個閉環(huán)系統(tǒng)。與一般的有刷電機不同,直流無刷電機的定子為電樞繞組,轉(zhuǎn)子采用永磁體[2]。本文介紹的無刷電機采用了三相星形聯(lián)結(jié)的全控電路,其基本構(gòu)成如圖2所示。
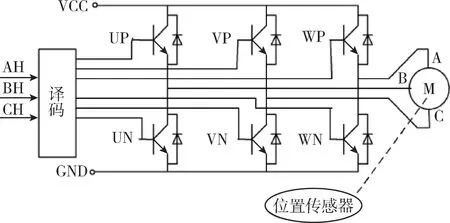
圖2 直流無刷電機基本構(gòu)成Fig.2 Basic composition of brushless DC motor
其換相電路為6個功率開關(guān)器件(IGBT或功率MOSFET)組成的三相逆變電路,當(dāng)接受到外部輸入的邏輯控制信號后進行譯碼,進而去驅(qū)動與電樞繞組連接的相應(yīng)的功率開關(guān)器件進行飽和導(dǎo)通和可靠關(guān)斷,使A、B、C三相繞組能按要求的順序?qū)?實現(xiàn)定子繞組的正確換相,從而保證電機的可靠運行[3]。
2 硬件電路設(shè)計
系統(tǒng)硬件電路設(shè)計包含電源電路、控制信號調(diào)理電路、CPLD控制單元、隔離驅(qū)動電路和功率放大電路五個部分的電路設(shè)計。
2.1 電源電路
電源電路將系統(tǒng)提供的一次電源進行變換后給控制系統(tǒng)內(nèi)部信號調(diào)理電路、CPLD控制單元、隔離驅(qū)動電路和功率放大電路各芯片供電,確保各電路正常工作,系統(tǒng)電源電路原理框圖如圖3所示。
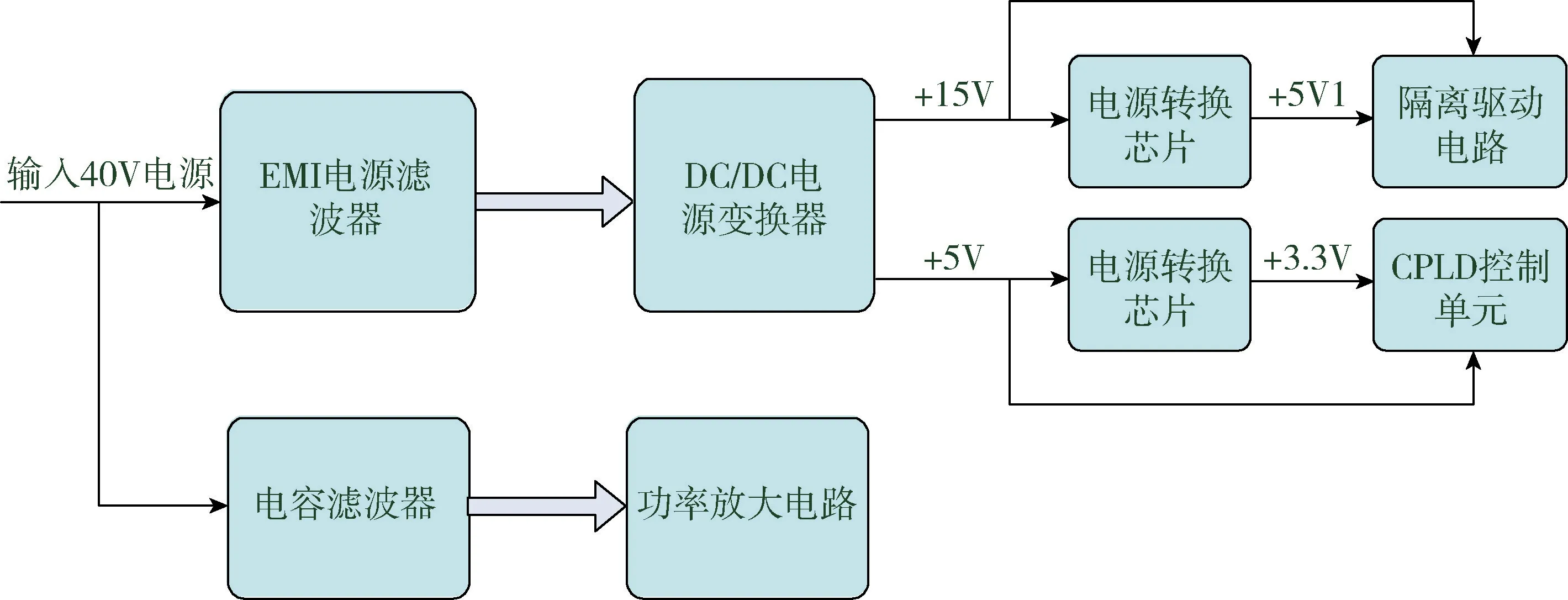
圖3 電源電路原理框圖Fig.3 Principle block diagram of power supply circuit
電源電路選用帶隔離輸出的DC/DC電源轉(zhuǎn)換器模塊,輸入電壓范圍為16VDC~50VDC,輸出為15V/1A和5V/1A,兩路電壓完全隔離,內(nèi)部各電源都放置去耦電容濾波,在電源給各芯片供電時,加磁珠來衰減電磁干擾信號,主要信號線之間加磁珠來衰減干擾信號,用隔離DC/DC將驅(qū)動地和控制地完全隔離。
在DC/DC輸入端加一級EMI電源濾波器來衰減電源線上的干擾信號,濾波器的額定電壓達到50VDC。為了防止瞬時過壓脈沖,電源的進入端加TVS管,從而有效保護了電子線路中的精密元器件免受損壞。
2.2 控制信號調(diào)理電路
電機控制信號主要包括調(diào)速信號、方向信號和限位開關(guān)信號。其中,調(diào)速信號和限位開關(guān)信號均為數(shù)字信號,設(shè)計時通過高速光耦隔離、電平轉(zhuǎn)換等電路處理后直接進入CPLD控制電路進行邏輯綜合;換向信號為模擬信號,必須經(jīng)過前端調(diào)理電路轉(zhuǎn)換為數(shù)字信號后才能進入CPLD進行處理。控制信號調(diào)理電路原理框圖如圖4所示。
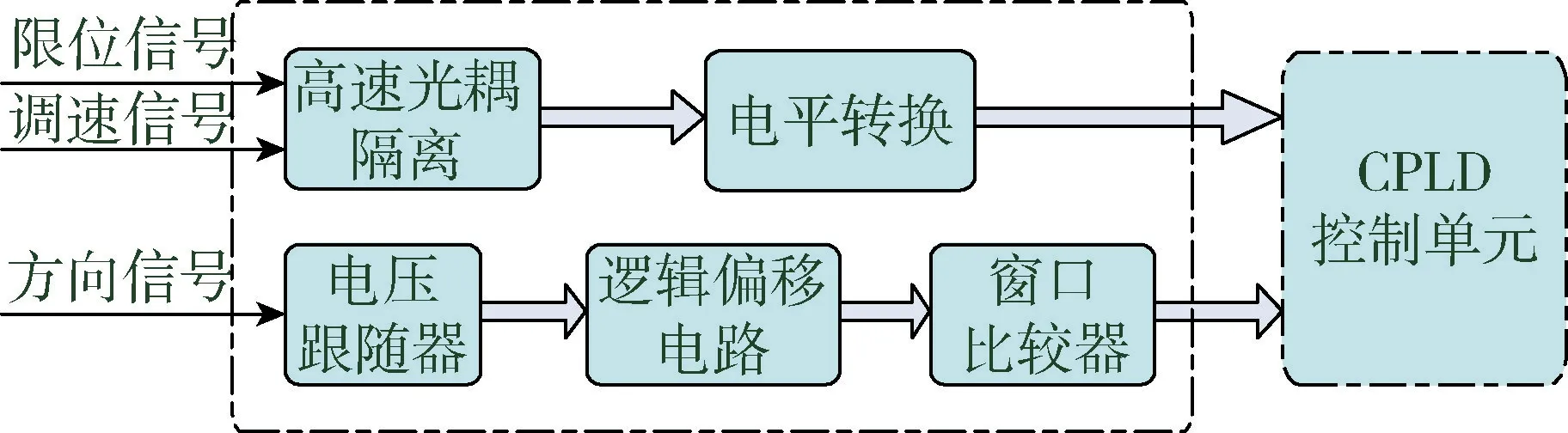
圖4 控制信號調(diào)理電路原理框圖Fig.4 Principle block diagram of control signal conditioning circuit
針對方向控制信號+5V、0V、-5V,為了滿足阻抗匹配的作用,設(shè)計了一電壓跟隨器,同時具有二階有源濾波器的功能,濾波器的截止頻率為1.6kHz。再采用邏輯偏移電路轉(zhuǎn)換為0V~3V的電壓信號,最后通過窗口比較器變換為兩路電平信號進入CPLD進行處理。
2.3 CPLD控制單元
CPLD控制單元是控制系統(tǒng)的核心,其主要功能為接收電機控制信號(包括調(diào)速信號、方向信號、限位信號)以及電機轉(zhuǎn)子位置反饋信號(霍爾傳感器輸出信號),進行邏輯綜合運算后產(chǎn)生PWM調(diào)寬波和邏輯控制信號提供給功率放大電路,控制電機三相電樞正確換相,使電機正常運行。CPLD控制單元功能框圖如圖5所示。
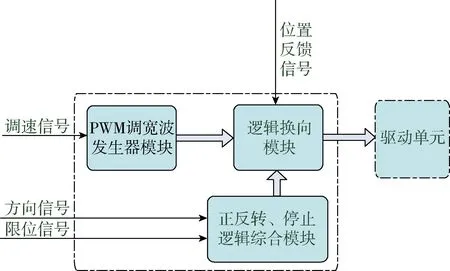
圖5 CPLD控制單元功能框圖Fig.5 Function block diagram of CPLD control unit
經(jīng)對CPLD實現(xiàn)功能和資源進行評估,選用型號為EPM1270T144I5N的CPLD芯片。該器件工作溫度范圍為-40℃~+105℃,內(nèi)部有1270個邏輯單元,等效宏單元數(shù)為980,供電電壓為3.3V或2.5V,TQFP-144封裝,最大工作頻率為304MHz,器件靜態(tài)功耗為150mW[1-2]。通過對CPLD代碼進行編譯綜合后,CPLD硬件資源占用比例為37%,占用CPLD宏單元數(shù)為362,占用CPLD管腳數(shù)為88,管腳資源占用比例為61%,可以滿足系統(tǒng)設(shè)計所需資源和I/O要求。
2.4 隔離驅(qū)動電路
隔離驅(qū)動電路包括光電隔離電路和柵極驅(qū)動電路,光電隔離電路的作用是對CPLD控制電路輸出的PWM控制信號進行電氣隔離;柵極驅(qū)動電路用于增強控制信號的驅(qū)動能力,并最終輸出控制電壓給三相逆變電路[9]。
PWM信號的電氣隔離采用高速光電耦合芯片TLP2116,該芯片的最大延遲時間為30ns,適合于電氣控制場合。柵極驅(qū)動電路采用兩片專用脈寬驅(qū)動集成芯片IR2108S控制H橋中的四個MOSFET,該芯片的應(yīng)用簡化了驅(qū)動電路的設(shè)計。IR2108S內(nèi)部采用自舉技術(shù)設(shè)計出懸浮電源,實現(xiàn)了一相兩個N溝道逆變橋輸出電路的控制[10]。該芯片供電電壓范圍為:+10V~+20V,靜態(tài)消耗電流最大為1.6mA,設(shè)計供電電壓為+15V。隔離驅(qū)動電路原理圖如圖6所示。
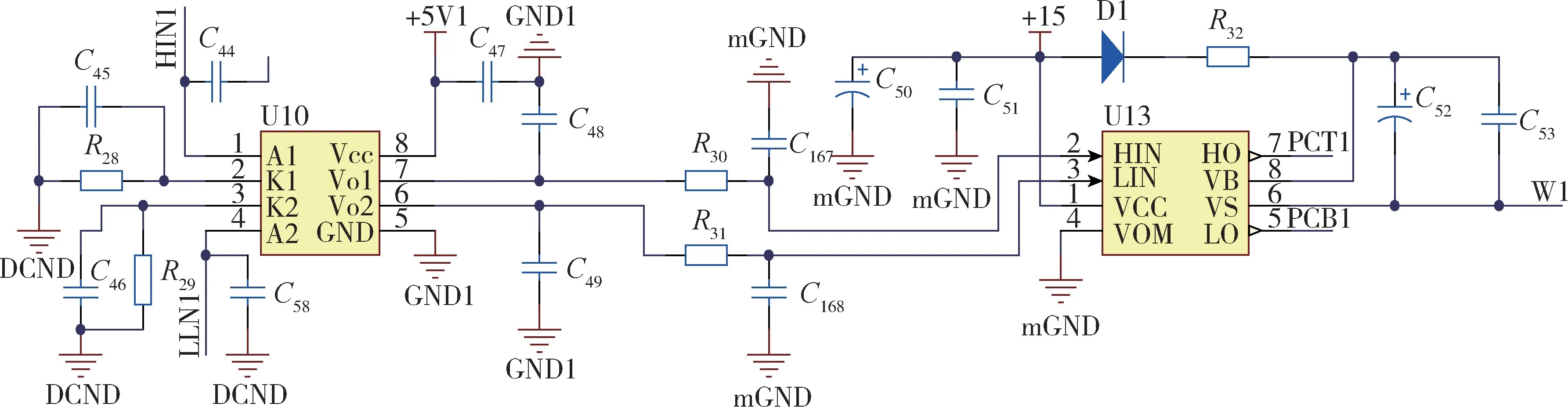
圖6 隔離驅(qū)動電路原理圖Fig.6 Schematic diagram of isolation drive circuit
2.5 功率放大電路
功率放大電路將多個功率開關(guān)器件集成到一起,廣泛應(yīng)用于無噪聲逆變器、低噪聲UPS和伺服控制器中[10]。系統(tǒng)由6只功率MOSFET組成,每兩只對應(yīng)電機的一相繞組,來實現(xiàn)驅(qū)動電機所需的三相逆變電路[11],其額定負載電流為33A,額定控制電壓為100V。另外還設(shè)計了電流檢測電路,該電路使用大功率采樣電阻將流經(jīng)電機繞組的電流信號轉(zhuǎn)換成電壓信號,經(jīng)二階濾波和放大,再與基準(zhǔn)電壓比較后輸出脈沖信號,經(jīng)光耦隔離反饋給CPLD起到限流作用。功率放大電路的原理圖如圖7所示。
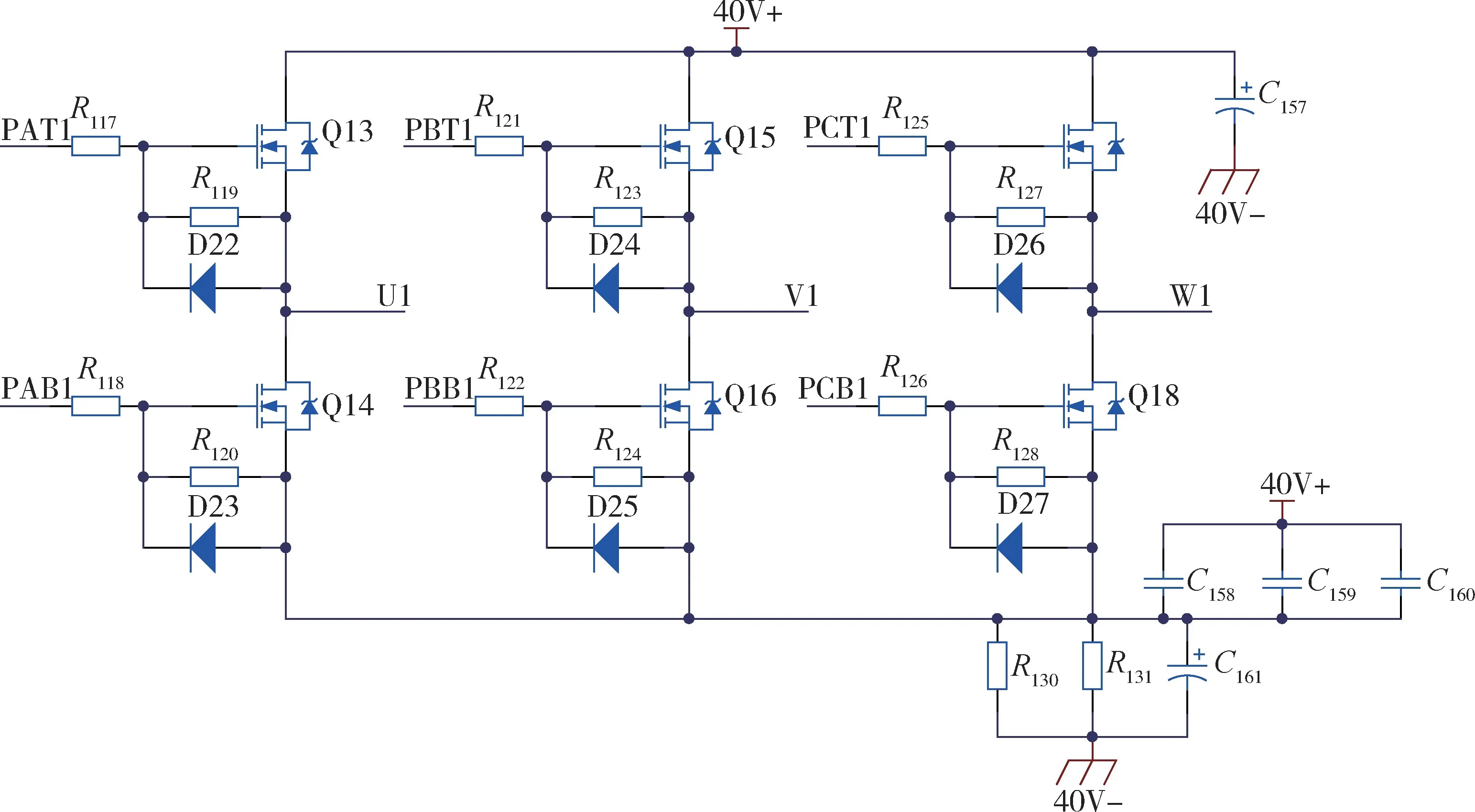
圖7 功率放大電路原理圖Fig.7 Schematic diagram of power amplification circuit
3 系統(tǒng)軟件設(shè)計
系統(tǒng)軟件設(shè)計主要在以CPLD為核心的平臺上進行,包括:I2C通信接口、查找表、PWM調(diào)寬波發(fā)生器和邏輯組合單元4個部分。
系統(tǒng)軟件功能框圖如圖8所示。
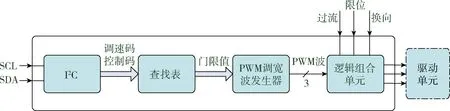
圖8 系統(tǒng)軟件功能框圖Fig.8 Function block diagram of CPLD control unit
3.1 I2C通信接口
I2C通信接口用來接收上位機發(fā)送的調(diào)速碼數(shù)據(jù),并將獲得的控制碼及調(diào)速碼送至查找表。
根據(jù)系統(tǒng)I2C通信協(xié)議,采用狀態(tài)機來實現(xiàn)I2C通信接口功能。狀態(tài)機邏輯圖如圖9所示。
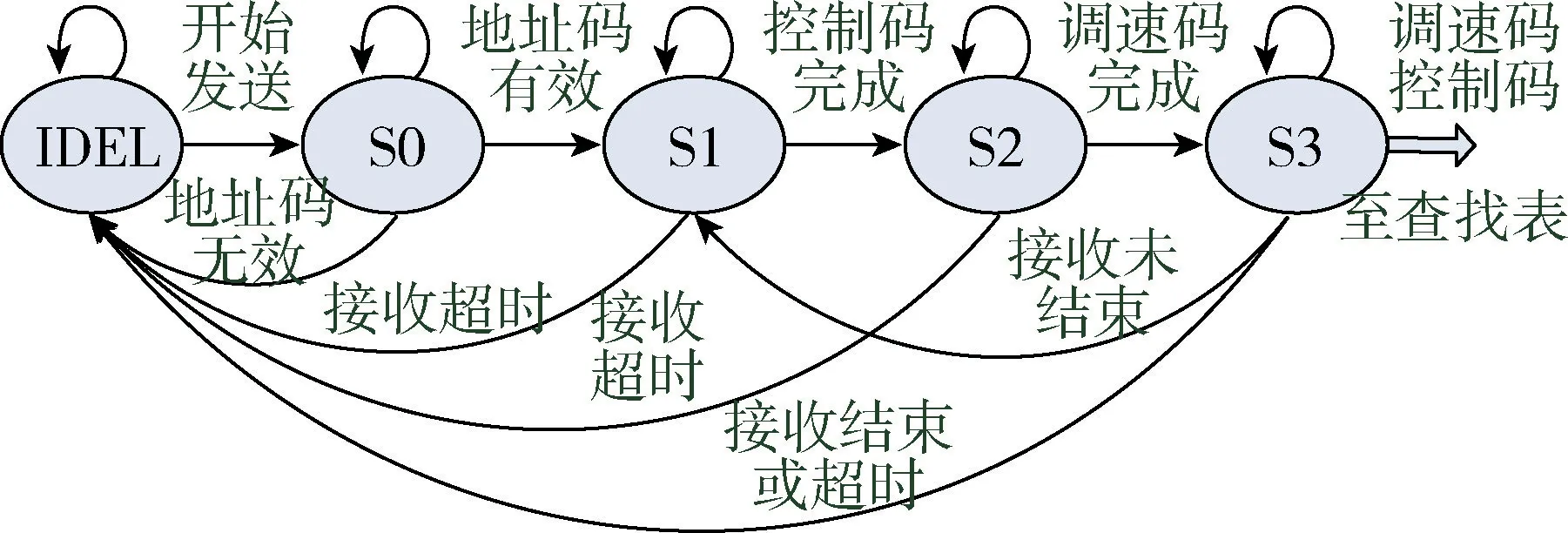
圖9 I2C通信接口狀態(tài)機邏輯圖Fig.9 Logic diagram of I2C communication interface state machine
狀態(tài)機各狀態(tài)含義如下:
(1)IDEL:初始狀態(tài)
此時,I2C通信接口不斷捕捉SCL和SDA端電平變化,一旦捕捉到調(diào)速碼發(fā)送開始狀態(tài)(即SCL為高,且SDA下降沿到達),狀態(tài)機立即跳轉(zhuǎn)到S0狀態(tài)。
(2)S0:接收地址碼
在每個SCL上升沿時刻,對SDA電平進行采樣,采樣完成后地址碼接收結(jié)束,并判斷該地址碼是否有效。當(dāng)?shù)刂反a有效時,則立即跳轉(zhuǎn)到S1狀態(tài);當(dāng)?shù)刂反a無效時,則跳轉(zhuǎn)到IDEL狀態(tài)。
(3)S1:接收控制碼
地址碼有效后,開始接收控制碼。在每個SCL上升沿時刻,對SDA電平進行采樣,采樣完成后控制碼接收結(jié)束,狀態(tài)機跳轉(zhuǎn)至S2狀態(tài)。
(4)S2:接收調(diào)速碼
控制碼接收結(jié)束后,開始接收調(diào)速碼。在每個SCL上升沿時刻,對SDA電平進行采樣,采樣完成后調(diào)速碼接收結(jié)束,狀態(tài)機跳轉(zhuǎn)至S3狀態(tài)。
(5)S3:更新控制碼及調(diào)速碼
當(dāng)一組控制碼及調(diào)速碼接收完成后,將當(dāng)前接收到的控制碼和調(diào)速碼同時發(fā)送至查找表,并判斷接收是否完成。若接收未結(jié)束,則跳轉(zhuǎn)至S1繼續(xù)接收下一組控制碼;若接收結(jié)束,則跳轉(zhuǎn)至IDEL等待下一次調(diào)速信號到達。
為避免通信異常,在狀態(tài)機中設(shè)有超時復(fù)位跳轉(zhuǎn)。當(dāng)接收開始后一定時間內(nèi)狀態(tài)機未有效接收到數(shù)據(jù),則跳轉(zhuǎn)至初始狀態(tài),重新等待上位機發(fā)送調(diào)速信號。
3.2 查找表
查找表用來建立調(diào)速碼信號與PWM調(diào)寬波發(fā)生器反轉(zhuǎn)門限值占空比之間的對應(yīng)關(guān)系,并根據(jù)控制碼和調(diào)速碼分別更新三個PWM調(diào)寬波發(fā)生器反轉(zhuǎn)門限值。
上位機提供的為調(diào)速碼信號,而最終輸出的信號為PWM調(diào)寬波,在調(diào)速碼與PWM調(diào)寬波發(fā)生器反轉(zhuǎn)門限值之間存在一一對應(yīng)關(guān)系,這種對應(yīng)關(guān)系可通過查找表來實現(xiàn)。查找表以調(diào)速碼為地址,該地址所保存的數(shù)據(jù)則為調(diào)速碼對應(yīng)的PWM調(diào)寬波反轉(zhuǎn)門限值。查找表依據(jù)接收到的調(diào)速碼給出相應(yīng)的反轉(zhuǎn)門限值,送至PWM調(diào)寬波發(fā)生器單元。查找表功能框圖如圖10所示。
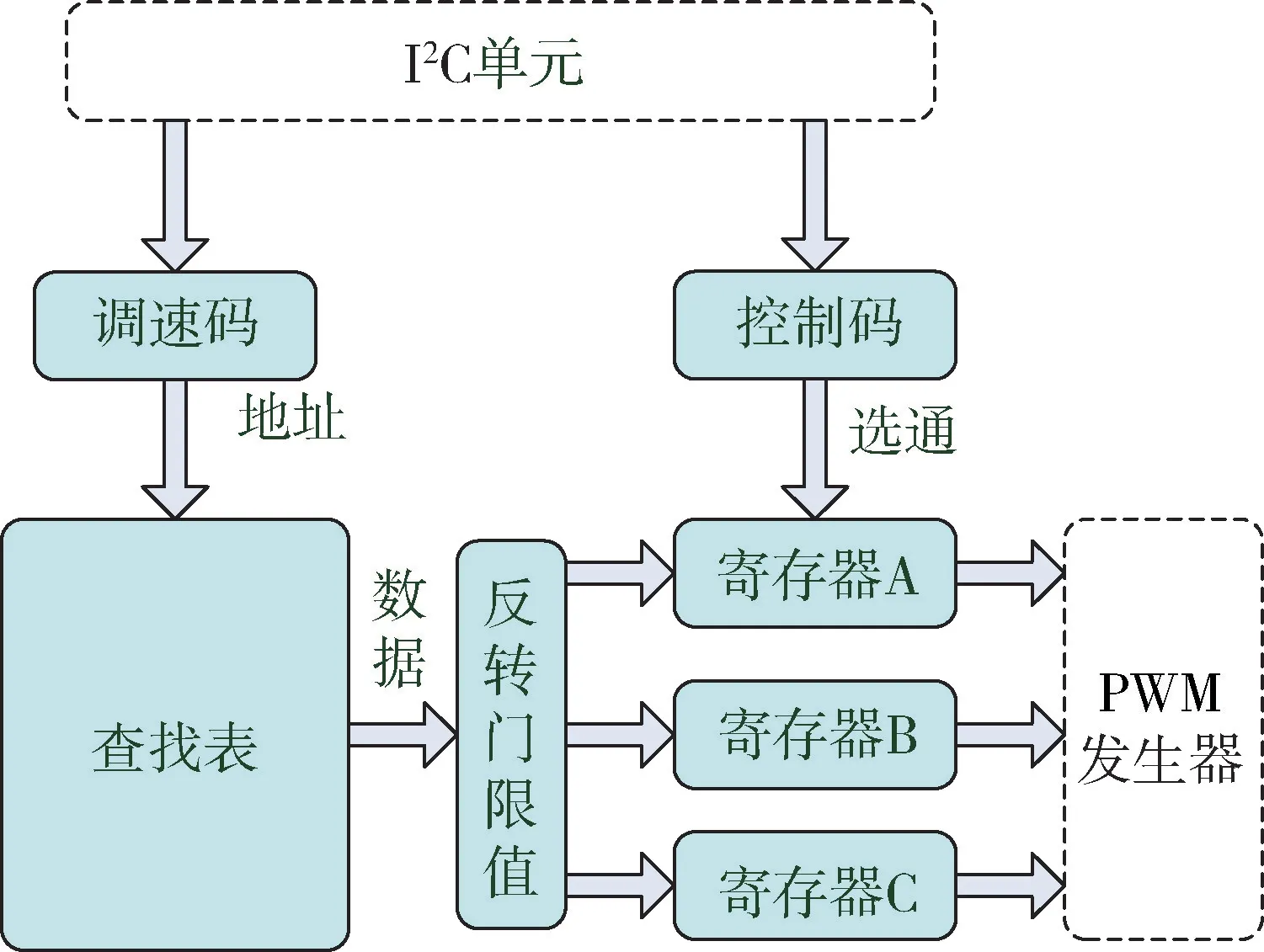
圖10 查找表功能框圖Fig.10 Function block diagram of lookup table
3.3 PWM調(diào)寬波發(fā)生器
PWM調(diào)寬波發(fā)生器由1個計數(shù)器和3個比較器組成,3個比較器的門限值分別對應(yīng)查找表給出的3個反轉(zhuǎn)門限值。
計數(shù)器計數(shù)值達到計數(shù)上限后自動清零,重新開始計數(shù)。在計數(shù)過程中,計數(shù)器計數(shù)值與反轉(zhuǎn)門限值進行比較:當(dāng)計數(shù)值小于某反轉(zhuǎn)門限值時,則對應(yīng)的PWM調(diào)寬波信號為“高”電平;當(dāng)計數(shù)值大于等于某反轉(zhuǎn)門限值時,則PWM調(diào)寬波信號反轉(zhuǎn)為“低”電平,最終產(chǎn)生PWM調(diào)寬波輸出。
PWM發(fā)生器的邏輯框圖如圖11所示。
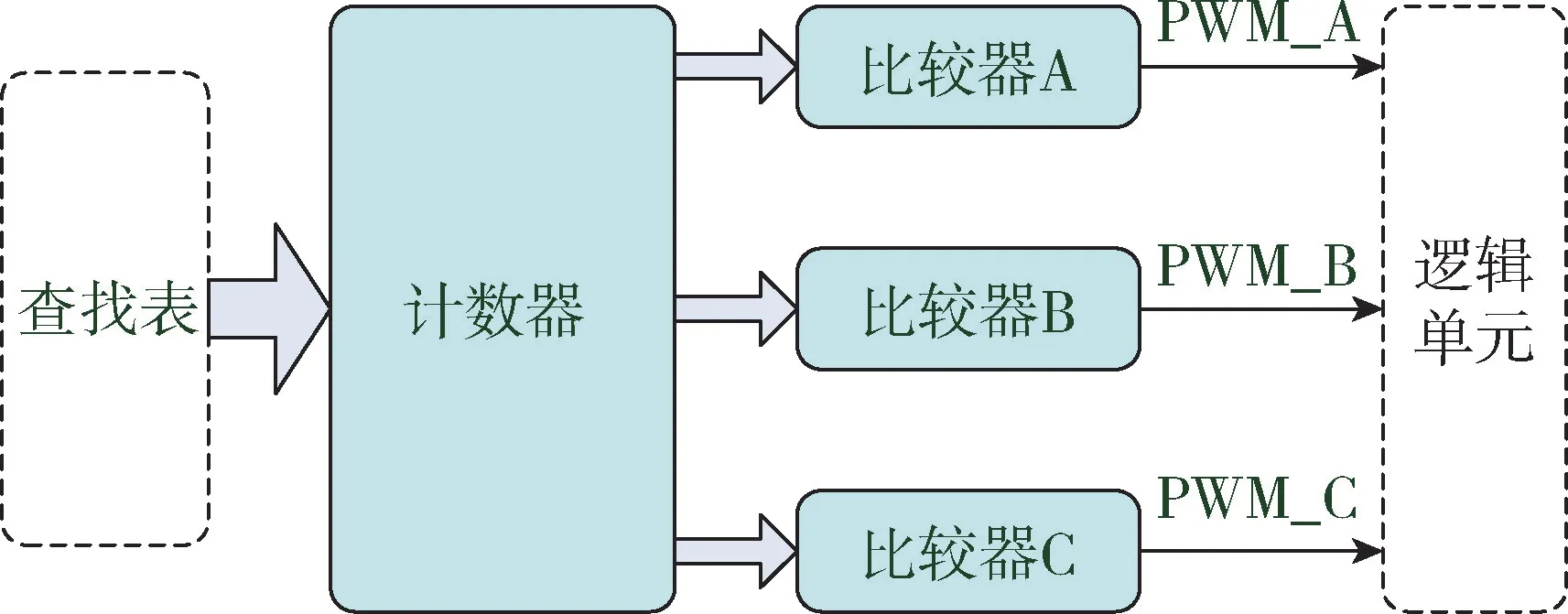
圖11 PWM發(fā)生器邏輯框圖Fig.11 Logic block diagram of PWM generator
3.4 邏輯組合單元
邏輯組合單元根據(jù)3路PWM調(diào)寬波以及方向、限位等信號并結(jié)合電機的位置傳感器輸出信號,經(jīng)邏輯組合后,為驅(qū)動單元提供邏輯控制信號。
換向信號與限位信號的邏輯組合如表1所示。
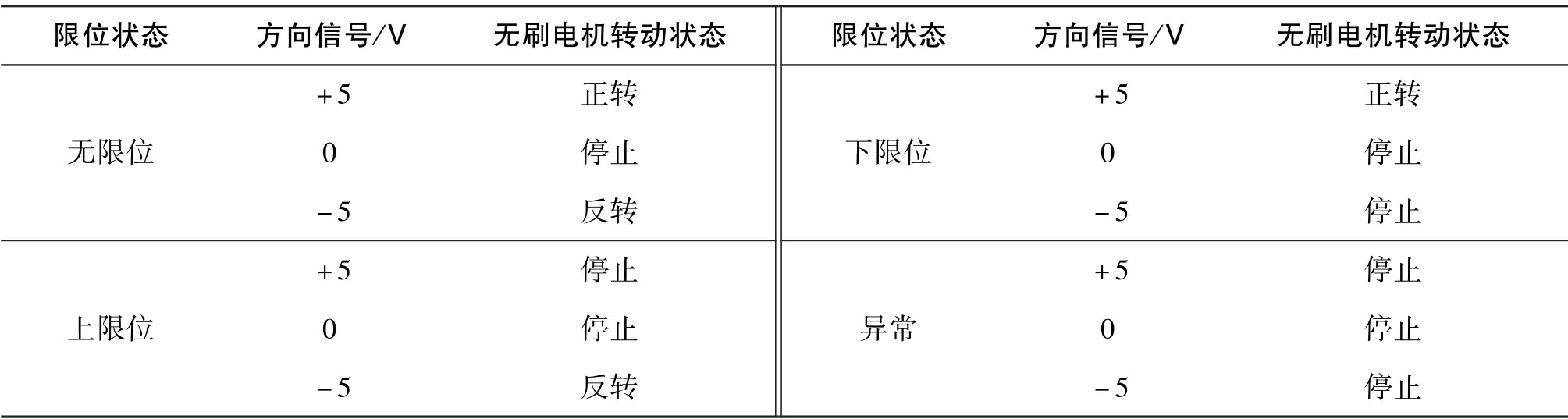
表1 換向信號與限位信號邏輯組合表Table1 Logical combination form of reversing signal and limit signal
4 系統(tǒng)試驗與結(jié)果分析
搭建系統(tǒng)測試平臺,使用工控機、數(shù)字電壓表、示波器、數(shù)字測速表及專用測試設(shè)備對系統(tǒng)進行方向控制、空載轉(zhuǎn)速、空載電流、動態(tài)響應(yīng)時間及負載轉(zhuǎn)速等性能測試,測試系統(tǒng)組成及測試條件如表2所示,系統(tǒng)測試平臺組成如圖12所示。

表2 測試系統(tǒng)組成及測試條件Table2 Test system composition and test conditions

圖12 系統(tǒng)測試平臺示意圖Fig.12 Schematic diagram of system test platform
給系統(tǒng)輸入±5V指令信號,控制電機正反轉(zhuǎn),測試時間為1.5個采樣周期,電機正反轉(zhuǎn)測試波形如圖13(a)所示。由圖13(a)可知,系統(tǒng)能可靠實現(xiàn)電機正反轉(zhuǎn)控制。使用示波器對電機電流信號進行監(jiān)測,電機啟動電流為4.9A,穩(wěn)定工作電流為0.2A,電機電流測試波形如圖13(b)所示。同時選取3套產(chǎn)品進行方向控制、空載轉(zhuǎn)速、空載電流、動態(tài)響應(yīng)時間及負載轉(zhuǎn)速等性能測試,產(chǎn)品性能測試數(shù)據(jù)如表3所示。由表3可知,所有測試結(jié)果均滿足系統(tǒng)技術(shù)指標(biāo)要求。
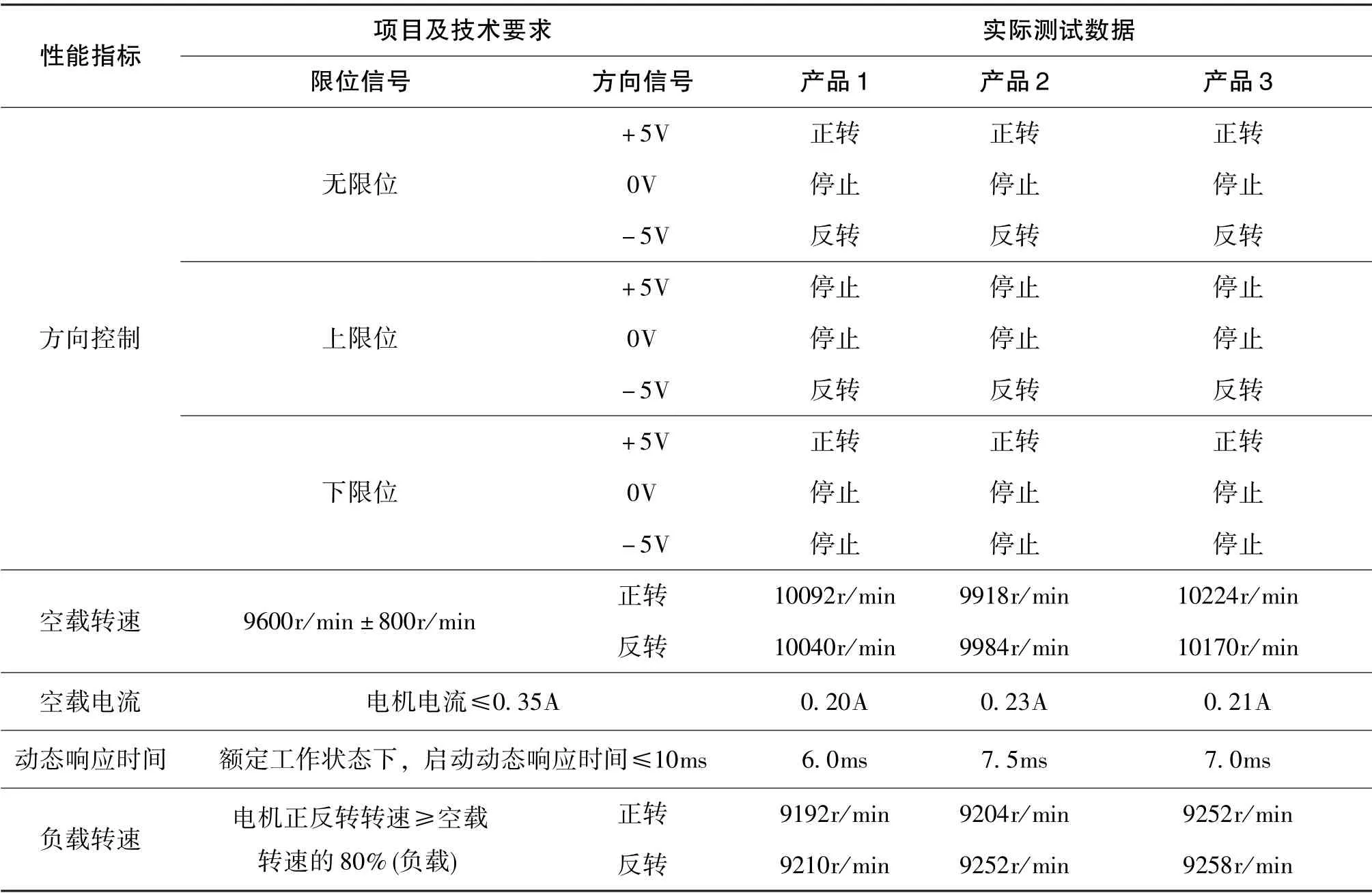
表3 產(chǎn)品性能測試數(shù)據(jù)Table3 Test data of product performance
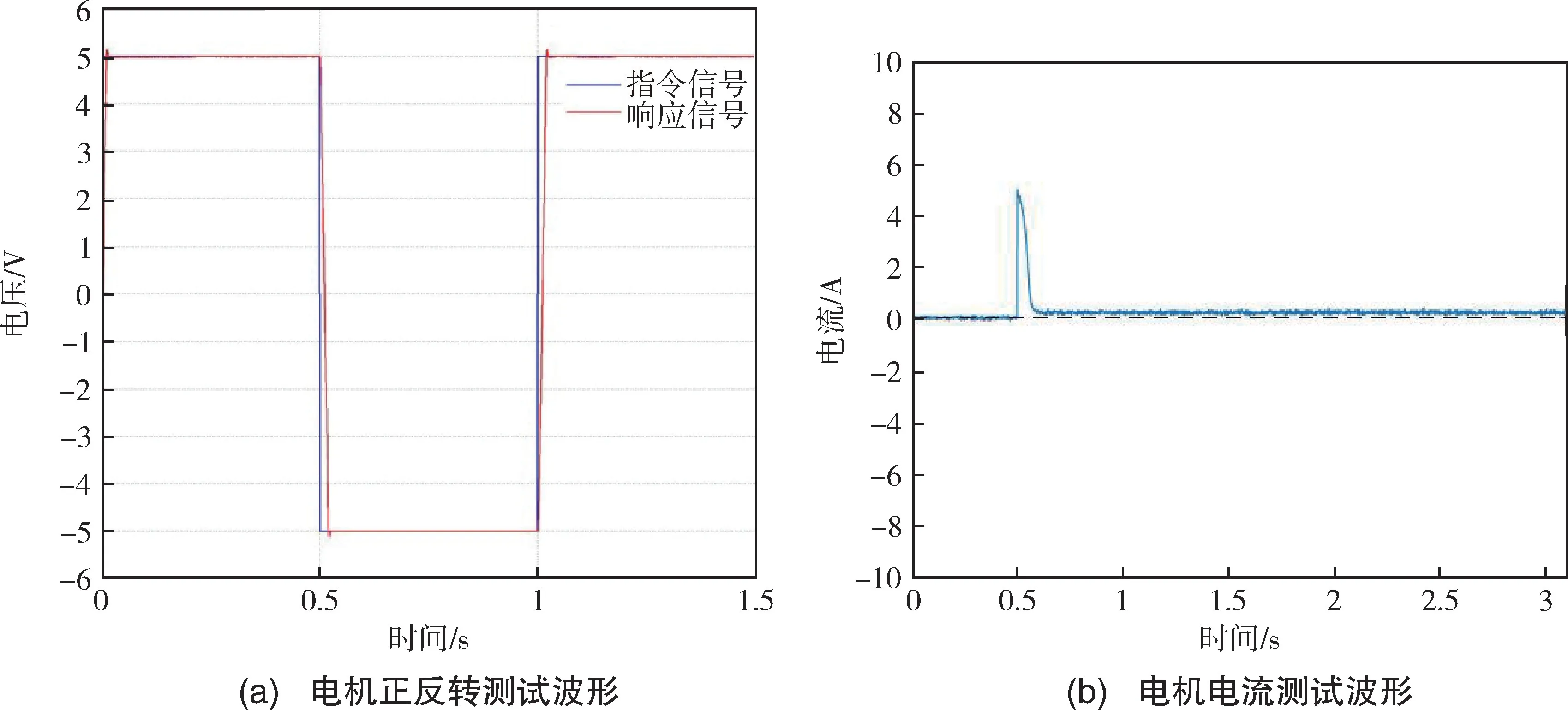
圖13 電機測試結(jié)果Fig.13 Test results of motor
目前,該系統(tǒng)已成功應(yīng)用于多個型號舵機產(chǎn)品上,在整機各項環(huán)境試驗中性能表現(xiàn)優(yōu)異。
5 結(jié)論
本文設(shè)計了一種直流無刷電機控制系統(tǒng),系統(tǒng)以復(fù)雜可編程邏輯器件(CPLD)EPM1270T144I5N為控制核心,以軟件算法代替硬件電路方式完成了對電機控制信號的解調(diào),并結(jié)合電機轉(zhuǎn)子位置傳感器的輸出,進行邏輯綜合運算后,產(chǎn)生PWM調(diào)寬波和邏輯控制信號提供給功率放大電路,以控制電機三相電樞正確換相,使電機正常運行。該系統(tǒng)已成功應(yīng)用于多個型號電動舵機產(chǎn)品中,功能、性能均滿足系統(tǒng)使用要求,并且具有功耗小、可靠性高、調(diào)試方便等優(yōu)點,具有較高的工程應(yīng)用價值。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25