相空間重構(gòu)與差分進(jìn)化算法-煙花算法-支持向量機(jī)結(jié)合的高壓開(kāi)關(guān)機(jī)械故障診斷方法
2022-07-28 07:46:08陳志華孫逸翀王紫薇柯強(qiáng)劉洋劉會(huì)蘭
科學(xué)技術(shù)與工程 2022年17期
陳志華, 孫逸翀, 王紫薇*, 柯強(qiáng), 劉洋, 劉會(huì)蘭
(1.國(guó)網(wǎng)湖北省電力有限公司黃岡供電公司, 黃岡 438000; 2.華北電力大學(xué)電氣與電子工程學(xué)院, 保定 071003)
高壓開(kāi)關(guān)作為電力系統(tǒng)重要的控制與保護(hù)設(shè)備,其控制回路、操作機(jī)構(gòu)和儲(chǔ)能機(jī)構(gòu)密切配合執(zhí)行儲(chǔ)能、合閘和分閘動(dòng)作,此過(guò)程體現(xiàn)了儲(chǔ)能電機(jī)、傳動(dòng)齒輪,彈簧、拐臂、主軸、連桿和動(dòng)觸頭之間能量傳遞[1],伴隨的振動(dòng)信號(hào)蘊(yùn)含機(jī)械部件傳動(dòng)、觸頭分離與碰撞,電機(jī)旋轉(zhuǎn)和彈簧伸縮儲(chǔ)能等豐富狀態(tài)信息,利用振動(dòng)信號(hào)區(qū)分開(kāi)關(guān)異常狀態(tài)成為近年來(lái)國(guó)內(nèi)外電氣設(shè)備故障研究焦點(diǎn)問(wèn)題[2-4]。
提取振動(dòng)特征的主要方法有小波變換(wavelet transform, WT)、經(jīng)驗(yàn)?zāi)B(tài)分解法(empirical mode decomposition, EMD)和相空間重構(gòu)。小波變換分解過(guò)程需設(shè)置母小波、分解層、頻帶閾值及合適分解方法。EMD可自適應(yīng)分解,但對(duì)于含有大量噪聲和干擾的振動(dòng)信號(hào),區(qū)分有用信號(hào)、噪聲和虛假分量卻十分困難。互補(bǔ)集合經(jīng)驗(yàn)?zāi)B(tài)分解[5-6](complementary ensemble empirical mode decomposition, CEEMD)是EMD的優(yōu)化形式,通過(guò)添加互補(bǔ)白噪聲有效解決模態(tài)混疊缺陷,再利用相空間重構(gòu)[7]從動(dòng)力學(xué)角度給出固有模態(tài)函數(shù)(intrinsic mode functions,IMF)分量的多維特征。
人工神經(jīng)網(wǎng)絡(luò)(artificial neural network, ANN)因泛化能力強(qiáng)多用于故障識(shí)別[8],但網(wǎng)絡(luò)訓(xùn)練需大量樣本數(shù)據(jù),恰恰是高壓開(kāi)關(guān)類設(shè)備現(xiàn)場(chǎng)操作不頻繁,導(dǎo)致故障數(shù)據(jù)樣本非常少,影響了神經(jīng)網(wǎng)絡(luò)診斷準(zhǔn)確性。基于統(tǒng)計(jì)學(xué)理論的支持向量機(jī)(support vector machine, SVM)實(shí)質(zhì)是凸二次規(guī)劃數(shù)學(xué)模型,在小樣本故障分析中運(yùn)算速度更快、精度更高[9]。SVM對(duì)初始參數(shù)敏感,何青等[10]利用果蠅優(yōu)化算法優(yōu)化核函數(shù)參數(shù),提高分類效果。Xue等[11]將煙花算法(fireworks algorithm, FWA)運(yùn)用到SVM尋優(yōu)提高了診斷正確率,但煙花爆炸過(guò)程屬于全局隨機(jī)搜索過(guò)程,運(yùn)行計(jì)算時(shí)間卻大幅增加。
現(xiàn)利用差分進(jìn)化算法(differential evolution,DE)加速FWA搜索過(guò)程,提出一種將相空間重構(gòu)與DE-FWA-SVM相結(jié)合診斷高壓開(kāi)關(guān)故障方法。首先,采用CEEMD分解原始振動(dòng)信號(hào)為若干頻帶信息,由相關(guān)系數(shù)篩選有價(jià)值IMF分量;其次,通過(guò)相空間重構(gòu)將所選IMF序列映射到多維空間,計(jì)算李雅普諾夫指數(shù)和關(guān)聯(lián)維數(shù)構(gòu)成特征向量;最后,輸入DE-FWA-SVM模型進(jìn)行故障診斷實(shí)驗(yàn)。以期加速參數(shù)最優(yōu)值的收斂,有效平衡分類器全局收斂能力和速度,對(duì)開(kāi)關(guān)機(jī)械故障快速準(zhǔn)確診斷具有應(yīng)用價(jià)值。
1 振動(dòng)信號(hào)特征提取
1.1 CEEMD算法
CEEMD是在EMD和總體平均經(jīng)驗(yàn)?zāi)B(tài)分解(ensemble empirical mode decomposition, EEMD)基礎(chǔ)上通過(guò)施加互補(bǔ)白噪聲[12],不僅削弱了模態(tài)混疊現(xiàn)象,還克服EEMD集總平均次數(shù)較多問(wèn)題[13],具體過(guò)程如下。
步驟1將一對(duì)互補(bǔ)白噪聲ni(t)分別添加到原始振動(dòng)信號(hào)x(t)中,得兩種新信號(hào),表達(dá)式分別為
Pi=x(t)+ni(t)
(1)
Ni=x(t)-ni(t)
(2)
步驟2對(duì)Pi、Ni分別進(jìn)行EMD分解,得到j(luò)個(gè)IMF分量cj(t),即
(3)
步驟3重復(fù)步驟1和步驟2,在信號(hào)中加入新的正態(tài)分布白噪聲序列,并將每次分解得到的IMF作為最終結(jié)果。
原信號(hào)經(jīng)CEEMD分解得到一組不同頻段的IMF分量,高頻IMF中包含大量受采集環(huán)境影響的噪聲干擾和分解出的虛假分量,不利于特征的提取,因此需對(duì)IMF進(jìn)行篩選。相關(guān)系數(shù)是衡量分解信號(hào)與原始信號(hào)相關(guān)程度的指標(biāo),其值越大,表明相關(guān)性越好,該分量更能反映原始狀態(tài)信息。利用相關(guān)系數(shù)保留價(jià)值IMF,并將相關(guān)系數(shù)較小的分量作為噪聲和冗余分量舍去。
1.2 相空間重構(gòu)
高壓開(kāi)關(guān)操動(dòng)屬于機(jī)構(gòu)多部件能量傳遞的非線性振動(dòng),相空間重構(gòu)能保證原動(dòng)力系統(tǒng)幾何不變性[14]。理論認(rèn)為信號(hào)中任一狀態(tài)分量都是由與之相互作用的其他分量決定[15],狀態(tài)信息隱含在分量的演化過(guò)程中,故可從一個(gè)時(shí)域分量中復(fù)原出信號(hào)的所有特征信息。應(yīng)用延遲坐標(biāo)法[16]選取任一階IMF分量Yi(t)經(jīng)不同延時(shí)構(gòu)造狀態(tài)向量,重構(gòu)相空間可表示為
Ym(n)={y(n),y(n+τ),…,y[n+(m-1)τ]}
(4)
y(k)=y(t+kΔt),k=1,2,…,N
(5)
(6)
式中:y(k)為k時(shí)刻離散化的系統(tǒng)值;τ為延時(shí)時(shí)間;m為嵌入維數(shù);t為采樣開(kāi)始時(shí)刻;Δt為采樣間隔;N為采樣長(zhǎng)度。
延遲時(shí)間τ和嵌入維數(shù)m的選擇對(duì)相空間重構(gòu)尤為重要,目前在參數(shù)選擇上有兩種觀點(diǎn)[17]:一種認(rèn)為兩者不相關(guān),τ和m可獨(dú)立求解,常用方法有自相關(guān)函數(shù)法、互信息法和關(guān)聯(lián)維數(shù)法;另一種認(rèn)為兩者相關(guān),利用C-C算法可對(duì)τ和m進(jìn)行聯(lián)合計(jì)算,融合了自相關(guān)函數(shù)和互信息法的優(yōu)點(diǎn),在求解非線性模型方面有較大優(yōu)勢(shì)[18]。C-C算法的計(jì)算步驟如下。
步驟1根據(jù)延遲時(shí)間τ的不同,將振動(dòng)信號(hào)的每階固有模態(tài)分量序列{Yi(t)}劃分為τ個(gè)不相交的時(shí)間序列S(m,N,r,τ)。
(7)

(8)
M=N-(m-1)τ
(9)
dij=‖yi-yj‖∞
(10)
(11)
式中:dij為∞函數(shù);r為搜索半徑,取小于max(dij)的任意值;θ(x)為Heaviside函數(shù);C(m,N,r,τ)為嵌入時(shí)間序列的關(guān)聯(lián)積分。

ΔS(m,N,r,τ)=max{S(m,N,r,τ)}-
min{S(m,N,r,τ)}
(12)
(13)
(14)
(15)
式中:nm為m個(gè)可能的取值;nk為k個(gè)可能的取值。
步驟3繪制S(τ)、ΔS(τ)及Scor(τ)的變化曲線,延遲時(shí)間窗口τw是在Scor(τ)取得全局最小值時(shí)對(duì)應(yīng)的延遲時(shí)間,再根據(jù)式(16)計(jì)算嵌入維數(shù)m。
(16)
高壓開(kāi)關(guān)正常分閘時(shí)振動(dòng)信號(hào)序列的參數(shù)結(jié)果如圖1所示,S(τ)的第一個(gè)零點(diǎn)的橫坐標(biāo)為2.482,ΔS(τ)的第一個(gè)極值點(diǎn)為5,因此延遲時(shí)間τ=5。Scor(τ)在τ=5時(shí)取到了全局最小值,所以延遲時(shí)間窗口τw=5,嵌入維數(shù)由式(16)得出m≈2。相空間重構(gòu)的嵌入時(shí)間序列的關(guān)聯(lián)積分為0.837,搜索半徑為r=10.804 2。由于重構(gòu)相空間的冗余和奇異吸引子軌道擁擠程度會(huì)隨這兩個(gè)重要參數(shù)而改變[19],所以利用C-C算法得到的延遲時(shí)間和嵌入維數(shù)即為最優(yōu)值。
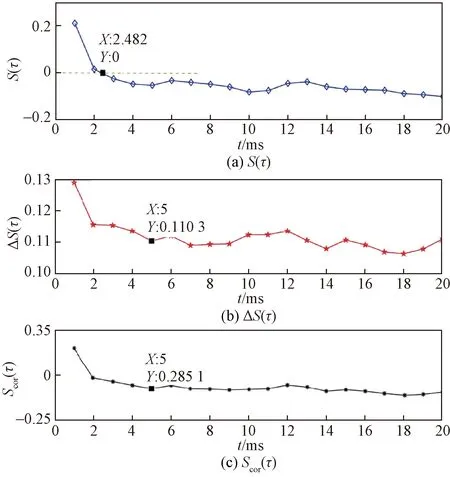
圖1 固有模態(tài)分量序列的S(τ)、ΔS(τ)及Scor(τ)變化曲線Fig.1 S(τ) of natural mode component sequence, ΔS(τ) andScor(τ) of the intrinsic mode component sequence
1.3 提取相空間混沌特征
相空間直觀圖因振動(dòng)信號(hào)時(shí)頻分解長(zhǎng)度不同存在波形相似的情況,不能直接定量反映非線性系統(tǒng)的本質(zhì)特征,故引入最大李雅普諾夫指數(shù)[20]和關(guān)聯(lián)系數(shù)[21]描述其動(dòng)力學(xué)特征。
假設(shè)原信號(hào)經(jīng)CEEMD分解為m階IMF分量,再通過(guò)相空間重構(gòu)計(jì)算李雅普諾夫指數(shù)T1=[T11,T12,…,T1m]和關(guān)聯(lián)系數(shù)T2=[T21,T22,…,T2m]。T1和T2構(gòu)成2m維特征向量T=[T11,T12,…,T1m,T21,T22,…,T2m]作為最終特征輸入到優(yōu)化后的支持向量機(jī)中進(jìn)行機(jī)械狀態(tài)識(shí)別。
2 DE-FWA-SVM的優(yōu)化診斷算法
支持向量機(jī)的核函數(shù)參數(shù)g和懲罰因子C對(duì)分類效果影響較大[22],首先將最優(yōu)參數(shù)C和g賦值給初始煙花,煙花算法通過(guò)模擬火花爆炸過(guò)程進(jìn)行全局隨機(jī)搜索,尋找適應(yīng)度較好的煙花[23-25]。根據(jù)動(dòng)態(tài)火花爆炸策略,差分進(jìn)化算法增加煙花在最優(yōu)值附近爆炸的數(shù)量,從而加快了煙花向適應(yīng)度好的位置收斂的速度,提高了煙火在最優(yōu)值附近的局部搜索能力[26]。
2.1 DE優(yōu)化FWA步驟
步驟1在可行解范圍內(nèi)隨機(jī)初始化n個(gè)煙花,并評(píng)估它們的適應(yīng)度Y是否超過(guò)最大適應(yīng)度Ymax。
Ymax=max[f(xi)]
(17)
式(17)中:f(xi)為該xi位置對(duì)應(yīng)的適應(yīng)度。
步驟2根據(jù)適應(yīng)度計(jì)算每個(gè)初始煙花的爆炸火花數(shù)量Si和爆炸范圍Ai。
(18)
式(18)中:A*為最大爆炸幅度;Ymin為當(dāng)前煙花種群最優(yōu)適應(yīng)度;ε為常數(shù);N3為種群總數(shù)。
步驟3對(duì)煙花進(jìn)行差分變異。通過(guò)二項(xiàng)式雜交方法,生成p個(gè)差分變異火花。
(19)
式(19)中:k=1,2,…,D;krand為區(qū)域[1,D]上的隨機(jī)數(shù);CR為雜交概率。
步驟4評(píng)估爆炸火花和變異火花的目標(biāo)函數(shù)值,根據(jù)動(dòng)態(tài)爆炸火花策略調(diào)整火花數(shù)目。
步驟5從中煙花集合Ω中選擇n個(gè)優(yōu)質(zhì)煙花進(jìn)入下一次爆炸,直至滿足迭代停止條件,個(gè)體被選擇的概率為
(20)
式(20)中:fmax(xi)為煙花集合Ω中個(gè)體最大適應(yīng)度。
2.2 核函數(shù)參數(shù)g和懲罰因子C的優(yōu)化步驟
應(yīng)用DE-FWA優(yōu)化SVM模型中的懲罰因子C和核函數(shù)參數(shù)g,算法流程圖如圖2所示,參數(shù)優(yōu)化步驟如下。
步驟1將懲罰因子Cmax和Cmin、核函數(shù)參數(shù)gmax和gmin賦值給初始煙花種群,隨機(jī)初始化煙花的位置和速度,設(shè)置最大迭代次數(shù)。
步驟2計(jì)算煙花粒子爆炸火花數(shù)量和爆炸范圍。
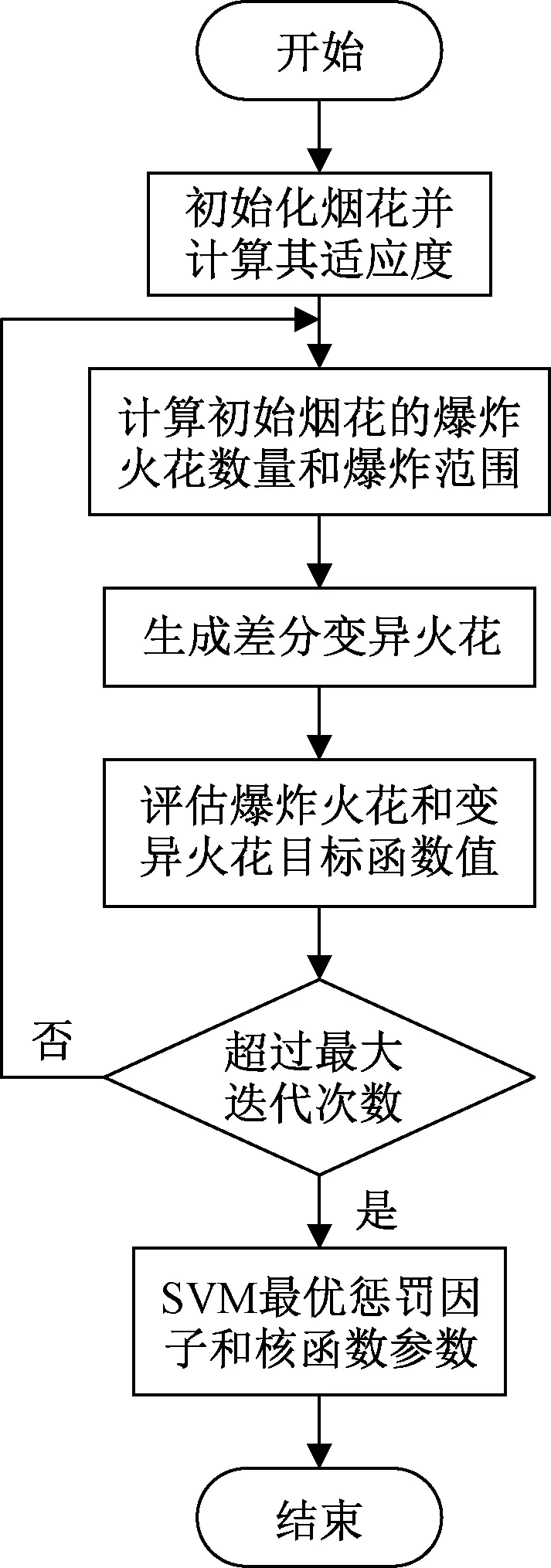
圖2 SVM優(yōu)化算法流程圖Fig.2 Flow chart of SVM optimization algorithm
步驟3更新煙花,并計(jì)算爆炸火花的適應(yīng)度是否在范圍內(nèi),當(dāng)滿足迭代要求時(shí)煙花繼續(xù)參與迭代,反之則被淘汰。
步驟4返回步驟2循環(huán),當(dāng)達(dá)到最大迭代次數(shù)時(shí),返回值即為SVM懲罰因子C和核函數(shù)參數(shù)g的優(yōu)化值。
3 試驗(yàn)及結(jié)果分析
3.1 高壓開(kāi)關(guān)測(cè)試試驗(yàn)
以ZN65-12型10 kV真空開(kāi)關(guān)為研究對(duì)象,采集正常分閘、基座松動(dòng)、轉(zhuǎn)軸卡澀、開(kāi)關(guān)拒動(dòng)、彈簧疲勞5種工況下振動(dòng)信號(hào)。通過(guò)木質(zhì)卡件增加機(jī)構(gòu)輸出轉(zhuǎn)軸阻尼模擬轉(zhuǎn)軸卡澀,如圖3(a)所示;使用墊片造成開(kāi)關(guān)底座接地不平衡模擬基座不穩(wěn),如圖3(b)所示;增大鐵芯間隙阻止擎子撞擊模擬產(chǎn)生拒動(dòng)故障,如圖3(c)所示;調(diào)節(jié)彈簧壓縮量模擬彈簧疲勞,如圖3(d)所示。采用YD-37壓電式加速度傳感器獲得振動(dòng)信號(hào),每種工況各采集40組,共160組樣本數(shù)據(jù),訓(xùn)練樣本和測(cè)試樣本按1∶1的比例隨機(jī)抽取。
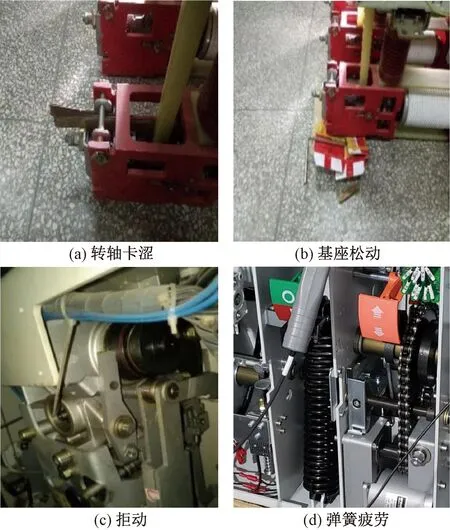
圖3 故障示意圖Fig.3 Failure diagram
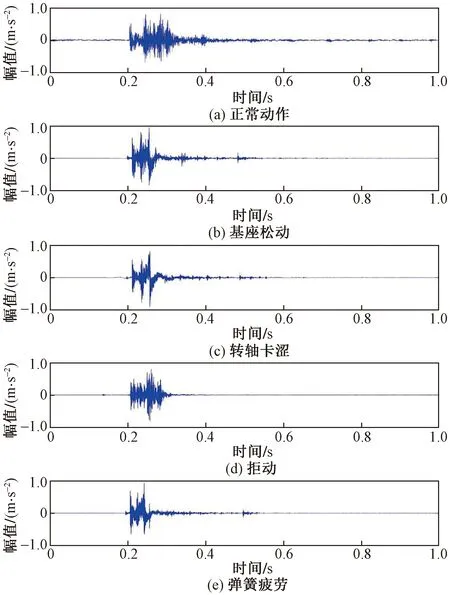
圖4 5種振動(dòng)信號(hào)波形示意圖Fig.4 Five kinds of original vibration signals
采集到的某組振動(dòng)信號(hào)時(shí)域波形如圖4所示。可以看出,不同狀態(tài)下高壓開(kāi)關(guān)的操動(dòng)控制,部件間能量傳遞產(chǎn)生振動(dòng)的時(shí)域波形差異并不明顯,提取顯著特征量和有效分類算法是準(zhǔn)確進(jìn)行故障診斷的關(guān)鍵。
3.2 振動(dòng)信號(hào)特征提取
將時(shí)域信號(hào)經(jīng)CEEMD分解到6個(gè)頻帶得到6階IMF分量,如圖5所示。各階分量中包含主信號(hào)成分不同,根據(jù)相關(guān)系數(shù)篩選出每種狀態(tài)最為合適的分量,相關(guān)系數(shù)值如表1所示。
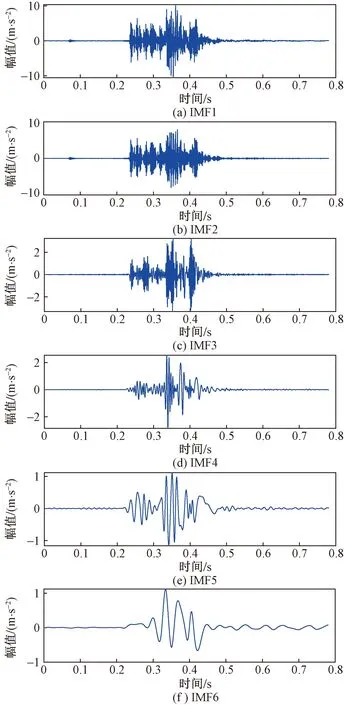
圖5 振動(dòng)信號(hào)的各階固有模態(tài)分量Fig.5 Natural modal components of vibration signals
由表1可看出,所有狀態(tài)下前三階分量的相關(guān)系數(shù)均較大,在IMF4~I(xiàn)MF6中取最大值保留,另外兩階相關(guān)系數(shù)較小的分量視為噪聲分量摒棄。因此,正常分閘和拒動(dòng)保留IMF1~I(xiàn)MF4、基座松動(dòng)、轉(zhuǎn)軸卡澀和彈簧疲勞保留IMF1~I(xiàn)MF3和IMF6作為

表1 不同工況下IMF分量相關(guān)系數(shù)Table 1 Correlation coefficient of IMF components under different working conditions
研究對(duì)象,篩選出的IMF分量通過(guò)相空間重構(gòu)還原出信號(hào)動(dòng)力學(xué)特性,并計(jì)算關(guān)聯(lián)維數(shù)和李雅普諾夫指數(shù)。
關(guān)聯(lián)維數(shù)采用飽和關(guān)聯(lián)維數(shù)法(correlation dimension method, G-P),正常分閘時(shí)IMF2的lnC-lnr曲線如圖6所示。關(guān)聯(lián)維數(shù)D即為曲線中直線斜率值,由圖1已算出相空間重構(gòu)的嵌入維數(shù)m=2,故正常分閘的IMF2的關(guān)聯(lián)維數(shù)為圖6中擬合m=2時(shí)直線斜率0.056 9。
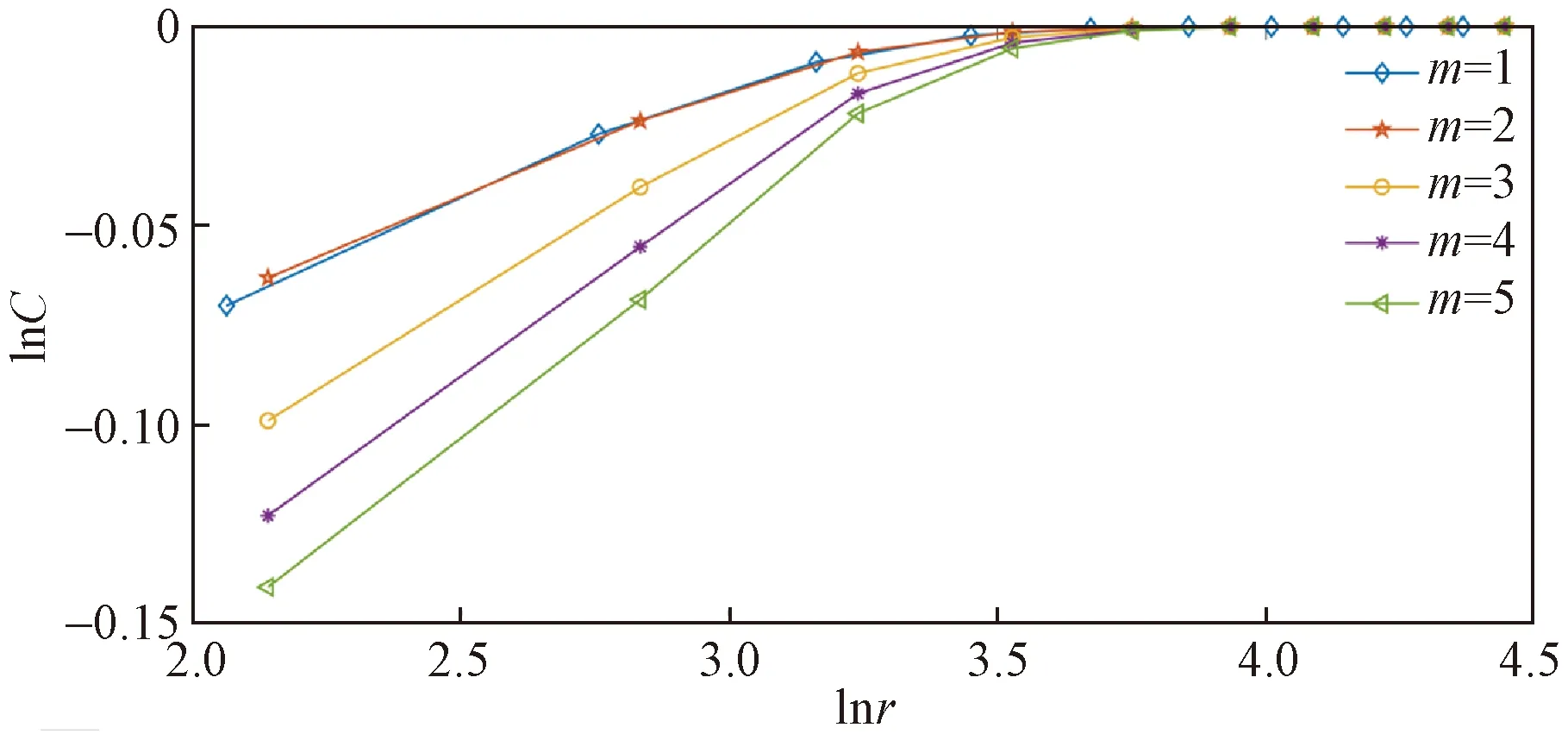
圖6 正常分閘IMF2的lnC-lnr曲線Fig.6 lnC-lnr curve of normal opening IMF2
李雅普諾夫指數(shù)采用經(jīng)典Wolf法,該指數(shù)是用于評(píng)價(jià)相空間收斂和發(fā)散程度的指數(shù)。表2是以5種工況下振動(dòng)信號(hào)重構(gòu)相空間的特征向量,T1為最大李雅普諾夫,T2為關(guān)聯(lián)維數(shù),取T1、T2為聯(lián)合特征輸入到分類器中進(jìn)行識(shí)別。
3.3 基于DE-FWA-SVM的故障診斷
為驗(yàn)證本文方法的有效性,選用遺傳算法(GA)、粒子群算法(PSO)、煙花算法(FWA)分別對(duì)SVM參數(shù)進(jìn)行對(duì)比優(yōu)化,煙花初始種群設(shè)置為20,最大迭代次數(shù)為200,圖7為4種優(yōu)化方式的診斷結(jié)果,表3為尋優(yōu)所得核函數(shù)參數(shù)C和g的取值及算法迭代時(shí)間。可以看出,DE-FWA-SVM測(cè)試準(zhǔn)確率高達(dá)98.75%,且在搜索域內(nèi)能快速找到最優(yōu)參數(shù),相較于FWA-SVM快7.52 s,說(shuō)明該算法迭代收斂能力更強(qiáng),DE-FWA-SVM與FWA-SVM算法診斷對(duì)比結(jié)果如圖8所示。圖8中正常分閘樣本標(biāo)簽為1,基座松動(dòng)樣本標(biāo)簽為2,轉(zhuǎn)軸卡澀標(biāo)簽為3,拒動(dòng)標(biāo)簽為4,彈簧疲勞標(biāo)簽為5。FWA-SVM有4個(gè)樣本分類錯(cuò)誤,其中2個(gè)基座松動(dòng)被誤分為正常,該情況稱為漏報(bào),在現(xiàn)場(chǎng)工作中,漏報(bào)往往比誤判帶來(lái)的危害更大。而DE-FWA-SVM僅一處轉(zhuǎn)軸卡澀誤分為拒動(dòng),分類準(zhǔn)確率明顯提升,且不存在漏報(bào)的情況,說(shuō)明加入差分進(jìn)化算法對(duì)FWA-SVM起到一定程度的優(yōu)化作用,該方法從診斷時(shí)間和診斷效果兩個(gè)方面都優(yōu)于GA和PSO優(yōu)化算法,在高壓開(kāi)關(guān)機(jī)械故障診斷中具有更高的分類特性。

圖7 4種算法對(duì)SVM參數(shù)迭代對(duì)比Fig.7 Comparison of SVM parameters iteration by four algorithms
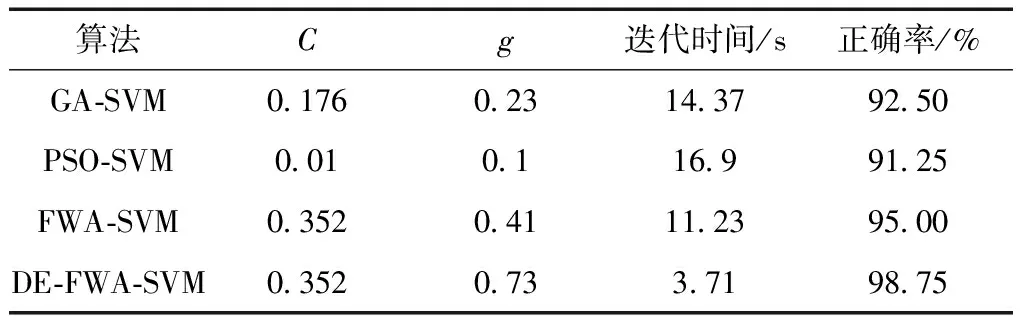
表3 4種算法對(duì)SVM參數(shù)尋優(yōu)對(duì)比Table 3 Comparison of four algorithms for SVM parameter optimization
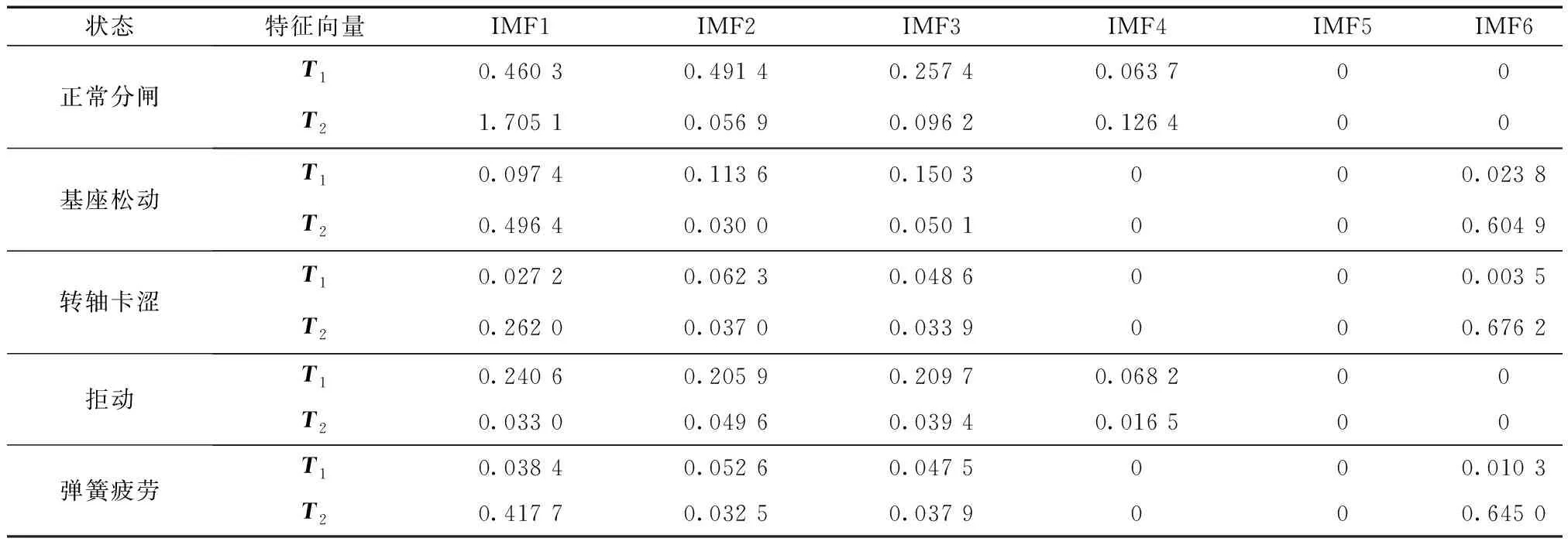
表2 重構(gòu)相空間特征Table 2 Reconstruction of phase space features
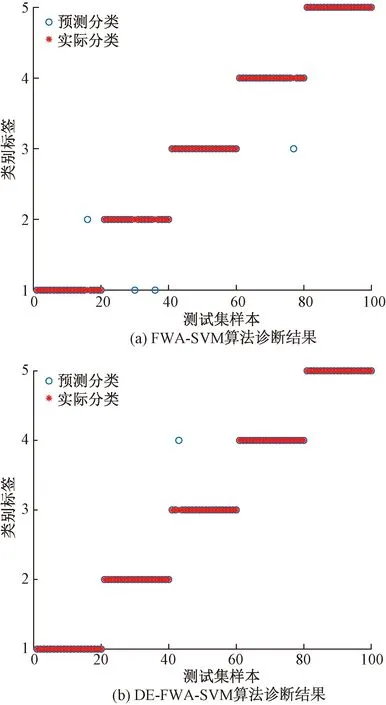
圖8 FWA-SVM與DE-FWA-SVM算法分類結(jié)果對(duì)比Fig.8 Comparison of FWA-SVM and DE-FWA-SVM algorithm classification results
4 結(jié)論
振動(dòng)信號(hào)可有效反映高壓開(kāi)關(guān)運(yùn)行狀態(tài),提出一種基于差分進(jìn)化FWA-SVM高壓開(kāi)關(guān)機(jī)械故障診斷方法。
(1)針對(duì)背景復(fù)雜振動(dòng)信號(hào)的噪聲干擾,通過(guò)CEEMD分解篩選相系數(shù)較大IMF分量保留有價(jià)值特征信息,結(jié)合相空間重構(gòu)混沌特性解決了能量泄露問(wèn)題。
(2)DE-FWA-SVM算法平衡全局搜索能力,同時(shí)加速了煙花向適應(yīng)度高的位置收斂,大幅度提升模型的分類準(zhǔn)確率。
(3)提出的振動(dòng)信號(hào)系列處理算法原理上具有一定優(yōu)勢(shì),目前限于現(xiàn)場(chǎng)高壓開(kāi)關(guān)故障數(shù)據(jù)較少,訓(xùn)練模型有待進(jìn)一步優(yōu)化。隨著開(kāi)關(guān)設(shè)備測(cè)試樣本的累積和訓(xùn)練模型的完善,有望推廣應(yīng)用于故障診斷的工程實(shí)踐中。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
