噴水推進器轉舵裝置的模糊自適應比例-積分-微分控制
2022-07-28 06:59:30劉海松張博倫孫小龍張宇
科學技術與工程 2022年17期
關鍵詞:模型
劉海松, 張博倫, 孫小龍, 張宇
(1.海軍裝備部駐寧波地區軍事代表室, 寧波 315000; 2.中國船舶重工集團公司第七一一研究所, 上海 200003;3.大連船用推進器有限公司, 大連 116000; 4.92453部隊, 福州 350000)
近年來,噴水推進技術在高性能、高速艦船領域已經得到了廣泛的應用[1-4]。噴水推進技術的原理是利用推進泵進出水流的作用與反作用力來產生推力,并通過轉舵裝置和倒航機構來控制改變噴流方向,從而實現對艦船的操縱控制[5-6]。實際裝備運行過程中,噴水推進器轉舵裝置及操控系統在復雜海況中受到外部干擾的影響較大,常規比例-積分-微分(proportion-integration-differentiation,PID)控制難以滿足其控制性能指標要求,為提高噴水推進器轉舵裝置的抗干擾性能,國內外研究人員展開了深入的研究。文獻[7]針對機電液伺服系統運行過程中存在的多余力干擾問題,提出了基于PID的改進人工蜂群控制算法。文獻[8]針對傳統的位置跟蹤伺服系統存在跟隨性能與抗干擾性能相互矛盾的問題,提出了將干擾觀測器與2自由度控制相結合的控制方案,大大提高了系統的魯棒性能。文獻[9]提出了對噴水推進器左右操舵機構同步控制策略,通過仿真和現場樣機試驗采樣數據對該方法進行了驗證。
雖然上述理論研究方法取得了較好的實驗效果,但存在與目前常用的基于可編程邏輯控制器(programmable logic controller,PLC)的集控系統難以相結合的矛盾,同時實際工況中噴水推進器在復雜海況下存在著轉舵裝置控制精度不高、抗干擾性能不強的現實問題。基于上述原因,現以實驗室現有設備噴水推進器為對象,以常規PID控制為基礎構建模糊自適應PID控制系統,設計控制策略,建立系統模型并進行仿真分析,最后搭建以PLC為控制核心的試驗平臺并進行相關試驗研究。以期為噴水推進器轉舵裝置的控制問題提供解決方案,也為其他類似裝置(如氣墊船空氣舵)的控制策略提供參考。
1 控制系統設計
1.1 模糊自適應PID控制策略總體結構
噴水推進器轉舵裝置在實際運行中存在風浪等外界干擾因素較多,常規PID控制將難以獲得較高的控制精度。針對這一問題,建立模糊自適應PID控制系統,以改進對噴水推進器轉舵裝置的控制效果,其控制結構如圖1所示。圖中虛線部分為模糊自適應PID控制器,其控制原理為根據系統所設定舵角與反饋舵角之間的誤差e以及誤差變化率ec,通過模糊計算得到控制量,從而達到控制舵角的目的。為了提高控制器的自適應性能,在系統工作過程中利用模糊控制規則在線對PID控制器的3個參數KP、KI、KD進行整定。
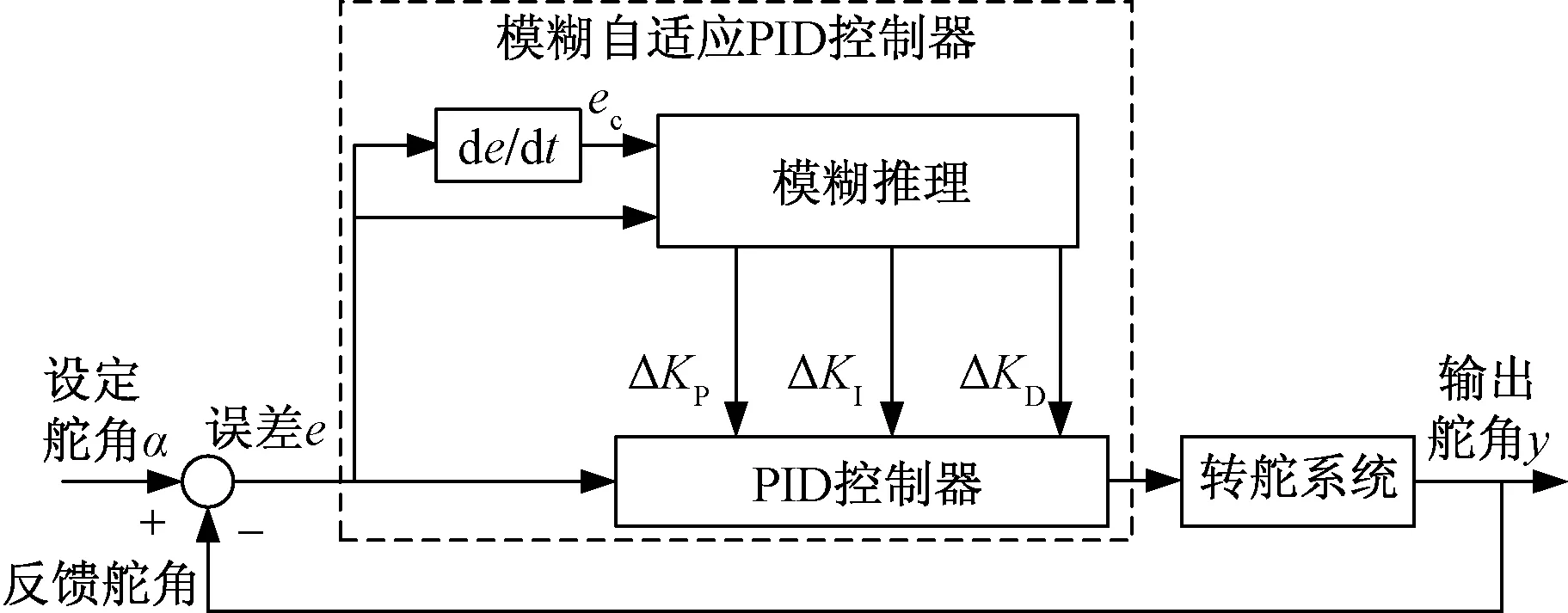
圖1 轉舵裝置模糊自適應PID控制系統結構Fig.1 Fuzzy self-adaptive PID control system structure of rudder device
1.2 模糊規則制定
圖1中模糊自適應PID控制器選取的輸入量為設定舵角與反饋舵角之間的誤差e以及誤差變化率ec,常規PID控制器變量參數的增量值ΔKP、ΔKI、ΔKD為輸出量。舵角誤差e的物理論域為[-25,25],舵角誤差變化率ec物理論域為[-0.02,0.02],模糊論域為{-3,-2,-1,0,1,2,3},模糊子集均為{NB,NM,NS,ZO,PS,PM,PB},即{負大,負中,負小,零,正小,正中,正大}。隸屬函數采用Mamdani型函數,則輸入變量和輸出變量的隸屬度曲線如圖2、圖3所示,確定模糊控制表如表1~表3所示。

圖2 e、ec的隸屬度曲線Fig.2 Membership curves of e and ec

圖3 ΔKP、ΔKI、ΔKD的隸屬度曲線Fig.3 Membership curves of ΔKP,ΔKI and ΔKD

表1 ΔKP的模糊控制表Table 1 Fuzzy control table of ΔKP
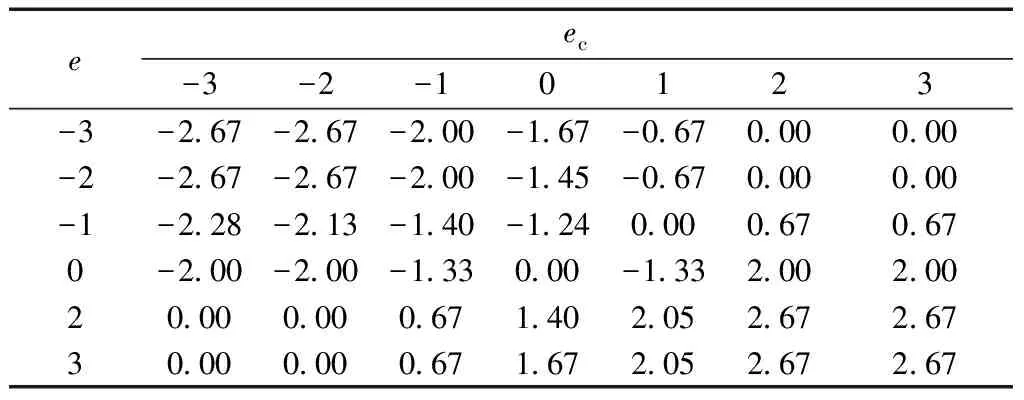
表2 ΔKI的模糊控制表Table 2 Fuzzy control table of ΔKI

表3 ΔKD的模糊控制表Table 3 Fuzzy control table of ΔKD
2 系統建模與仿真
2.1 轉舵裝置工作原理
噴水推進器轉舵裝置工作原理如圖4所示,其控制過程為:駕駛人員根據航行需求操縱舵輪時,設定角度信號經上位機處理后傳送至液壓系統,由液壓缸驅動方向舵轉動相應的角度,安裝于轉舵裝置上的傳感器將轉動角度位置信號采集傳送至控制系統,系統根據設定舵角與反饋舵角的差值進行調節,從而完成轉舵裝置的閉環控制[10-14]。
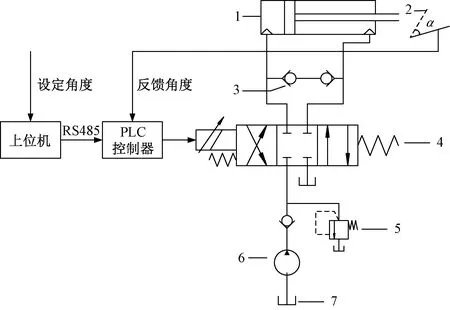
1為液壓缸;2為舵輪示意;3為梭閥;4為比例閥;5為溢流閥;6為液壓泵;7為油箱;α為方向舵轉動角度圖4 轉舵裝置結構原理圖Fig.4 Structure diagram of rudder device
2.2 轉舵控制系統建模
2.2.1 液壓缸數學模型

Ps為供油壓力;P0為回游壓力;q1為左側腔流量;q2為右側腔流量;P1為左側腔壓力;P2為右側腔壓力;x為閥芯位移;A1為左側油液作用面積;A2為右側油液作用面積;V1左側油腔體積;k為負載彈簧剛度;F為彈簧彈力;y為活塞位移圖5 閥控非對稱液壓缸結構Fig.5 Structure of valve controlled asymmetry hydraulic cylinder
噴水推進轉舵裝置液壓缸的類型為閥控非對稱液壓缸結構,其模型如圖5所示。液壓缸中兩個工作腔的油液作用面積不同,即A1≠A2,一般取ε=A2/A1[15-16]。由于液壓系統本身存在非線性特性,為方便計算,根據實際情況,在模型分析中進行合理簡化和假設[17-19]:供油壓力PS恒定,回油壓力P0=0;液壓缸每個工作腔內各處壓力相等;忽略液體阻力和慣量對負載位移的影響。
忽略非線性摩擦因素,根據液壓系統的工作原理,可得液壓缸活塞的力平衡方程為
(1)
式(1)中:m為活塞桿及相關部件的總質量,kg;BC為活塞的黏性阻尼系數,N·s/m;k為負載彈簧剛度,N/m。
由流體力學可得,液壓缸左側腔的流量為
(2)
(3)
式中:cd為閥芯的流量系數;ω為閥芯的面積梯度,m2;x為閥芯位移,m;ρ為液體密度,kg/m3。
當活塞處于勻速運動狀態時,則有
(4)
由ε=A2/A1可得
(5)
定義負載的壓力為
PL=P1-εP2
(6)
綜合式(2)~式(6),可得
(7)
由負載流量的定義,可得
(8)
負載流量的增益可得
(9)
負載流量的壓力增益可得
(10)
綜合式(8)~式(10),可得線性化流量方程的表達式為
qL=Kqzx-KpzPL
(11)
液壓缸內的油液本身具有可壓縮性,并假設活塞兩腔初始容積相等,則液壓缸的流量連續性方程為
(12)
(13)
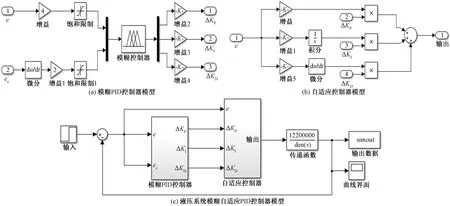
圖6 仿真模型Fig.6 Simulation model
式中:V0為液壓缸總體積的一半,m3;βe為液壓油的等效體積彈性模數,N/m2;Ci為液壓缸活塞的有效面積;Cs為液壓活塞的位移。
整理可得
(14)
2.2.2 比例閥數學模型
轉舵裝置中的比例閥可看作為比例環節[13-14],則電壓輸入u與閥芯位移xv的傳遞函數可表示為
(15)
式(15)中:K1為增益,m/V。
2.2.3 轉舵機構數學模型
轉舵機構噴口的角度θ與液壓缸位移y之間的關系為
(16)
式(16)中:r為轉舵機構噴口的轉動半徑,m。
2.2.4 模型總成
綜上,系統輸出量可表述為
(17)

2.3 仿真分析
在MATLAB/Simulink環境下建立噴水推進器轉舵裝置模糊自適應PID控制器仿真模型,如圖6所示。模型仿真參數設置如表4所示。在搭建仿真模型的基礎上,對模糊自適應PID控制和常規PID控制進行對比仿真研究。舵角設定值從-20°開始,之后每10 s變化一次,仿真時間60 s,舵角跟蹤仿真曲線如圖7所示。由圖7可知,舵角變化量為20°時,模糊自適應PID控制曲線達到穩態時間比常規PID控制曲線提前20%;當舵角由正向負進行40°大角度轉舵時,模糊自適應PID控制曲線達到穩態時間比常規PID控制曲線提前25%,且超調量在各階段幾乎都減少為0。因此,與常規PID控制相比,模糊自適應PID控制響應快速、跟蹤性能好,且超調量較小。

表4 模型仿真參數Table 4 Parameters of model

圖7 舵角控制過程仿真曲線Fig.7 Simulation curve of rudder angle control
3 試驗驗證
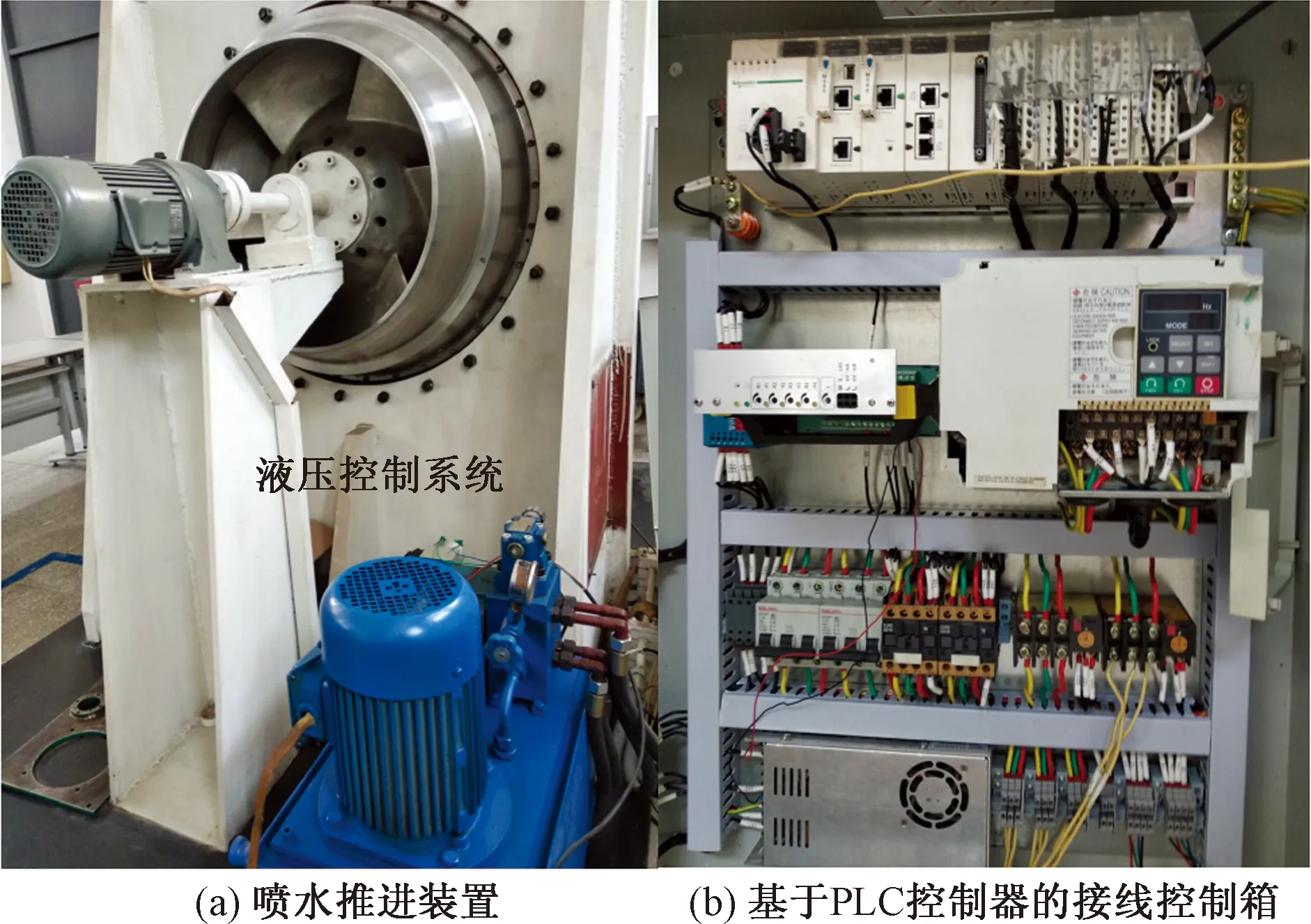
圖8 試驗裝置Fig.8 Experiment device
以實驗室現有噴水推進器樣機為對象,構建以施耐德M340 型PLC控制器為核心的監控裝置,進行舵角閉環控制響應試驗和抗干擾試驗。試驗裝置如圖8所示。試驗過程為設定舵角由0°轉到25°,在t=70 s時施加10%的負載干擾,分別采用模糊自適應PID控制和常規PID控制方案,得到在兩種控制策略的舵角響應曲線如圖9所示,分析可得舵角控制指標如表5所示。
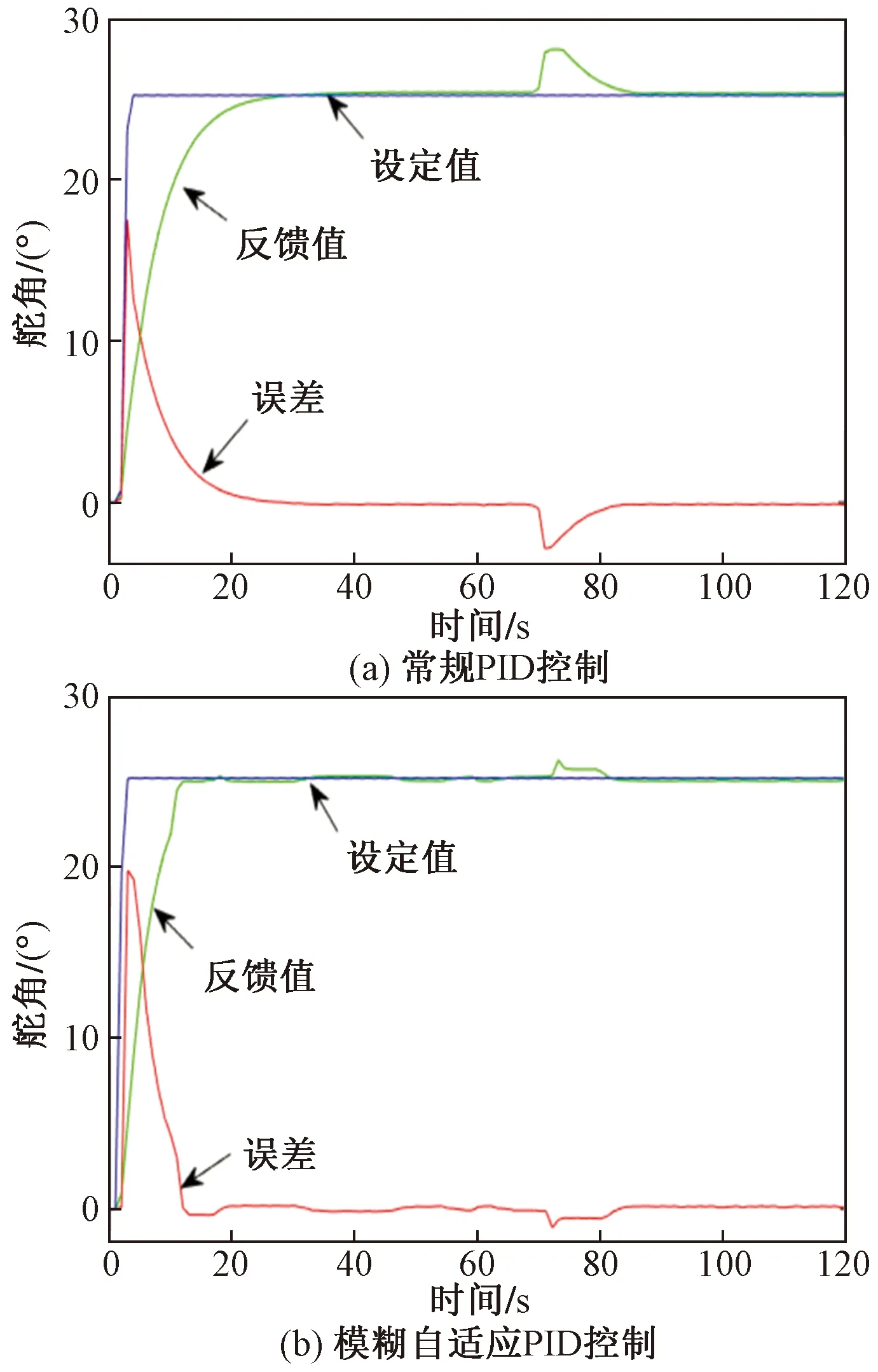
圖9 試驗曲線Fig.9 Experiment curve
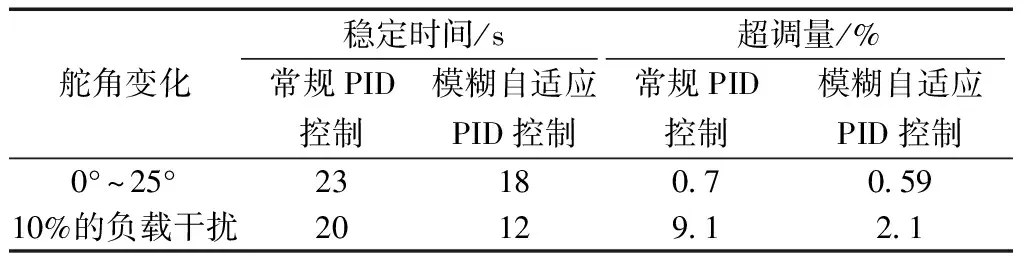
表5 舵角控制指標對比Table 5 Contrast of rudder angle control indicators
由表5可得,設定舵角由0°轉到25°在常規PID控制下的穩定時間為23 s,超調量為0.7%;而模糊自適應PID控制的穩定時間為18 s,超調量為0.59%。在10%的負載干擾下,常規PID控制下的穩定時間為20 s,超調量為9.1%;而模糊自適應PID控制的穩定時間為12 s,超調量為2.1%。由此可見模糊自適應PID控制效果優于常規PID控制。
4 結論
在常規PID控制噴水推進器轉舵裝置的基礎上,引入模糊自適應控制,建立了適用于噴水推進器轉舵裝置的模糊自適應PID控制系統。在MATLAB/Simulink中建立了模糊自適應PID控制系統仿真模型,依托實驗室現有樣機,搭建了以PLC控制器為核心的試驗平臺。仿真及試驗結果表明,采用模糊自適應PID控制的噴水推進轉舵裝置具有響應速度快、穩定性強、超調量小、抗干擾性強的優勢。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
