外后視鏡內(nèi)側(cè)夾角對(duì)氣動(dòng)噪聲的影響
2022-07-28 07:47:08徐明葉佳朱茂桃
科學(xué)技術(shù)與工程 2022年17期
徐明, 葉佳, 朱茂桃*
(1.上海干巷車(chē)鏡實(shí)業(yè)有限公司產(chǎn)品研發(fā)部, 上海 201518; 2.江蘇大學(xué)汽車(chē)與交通工程學(xué)院, 鎮(zhèn)江 212013)
隨著汽車(chē)技術(shù)的發(fā)展,人們不僅僅關(guān)注汽車(chē)安全性、動(dòng)力性和燃油經(jīng)濟(jì)性,而且對(duì)乘車(chē)舒適性也提出了較高的要求。當(dāng)車(chē)輛的行駛速度超過(guò)100 km/h時(shí),氣動(dòng)噪聲對(duì)駕駛室內(nèi)的影響占主導(dǎo)地位[1-2]。因此,降低氣動(dòng)噪聲已經(jīng)成為噪聲控制領(lǐng)域的一個(gè)重要課題。汽車(chē)行駛時(shí),高速氣流流過(guò)存在不規(guī)則曲面結(jié)構(gòu)的汽車(chē)表面,會(huì)發(fā)生氣流分離現(xiàn)象,形成較為劇烈的湍流結(jié)構(gòu),引起周?chē)諝鈮毫γ}動(dòng),進(jìn)而產(chǎn)生氣動(dòng)噪聲[3-5]。其中A柱-后視鏡區(qū)域是前側(cè)窗處的主要噪聲源,對(duì)駕駛室內(nèi)影響較大[6]。因此,對(duì)此區(qū)域的流場(chǎng)和聲場(chǎng)進(jìn)行研究對(duì)降低駕駛室內(nèi)氣動(dòng)噪聲水平具有積極的意義,這也是汽車(chē)氣動(dòng)噪聲領(lǐng)域亟須解決的問(wèn)題。目前,國(guó)內(nèi)外對(duì)于后視鏡氣動(dòng)噪聲的研究取得了一定的成果。Chen等[7]通過(guò)后視鏡-平板模型研究?jī)煽钔ㄓ煤笠曠R尾部的時(shí)均靜態(tài)聲壓,為后視鏡-平板的研究方案提供了參考依據(jù)。Mukkamala等[8]使用Fluent軟件對(duì)安裝在楔形體上的后視鏡的氣動(dòng)噪聲進(jìn)行研究,采用大渦模擬對(duì)產(chǎn)生的渦旋進(jìn)行計(jì)算,并預(yù)測(cè)了氣動(dòng)噪聲,發(fā)現(xiàn)這種方法不僅保證準(zhǔn)確性而且可以顯著減小計(jì)算時(shí)間。Mukkera等[9]通過(guò)分離渦模擬(detached-eddy simulation,DES)分別對(duì)基準(zhǔn)后視鏡、安裝在車(chē)門(mén)上的后視鏡和無(wú)后視鏡的情況進(jìn)行了分析,結(jié)果表明,與基準(zhǔn)后視鏡相比,安裝在車(chē)門(mén)上的后視鏡使車(chē)內(nèi)平均聲壓級(jí)降低了17%。Chu等[10]基于計(jì)算流體動(dòng)力學(xué)(computational fluid dynamics,CFD)分析,在不減小尺寸的情況下,在后視鏡殼體的內(nèi)邊緣和外邊緣上制作了附加的線(xiàn)孔(內(nèi)凹),結(jié)果表明,帶有內(nèi)部管道的OSRVM模型可以顯著改善速度分布和聲壓級(jí)。李啟良等[11]選用普通類(lèi)后視鏡模型,研究前臉、后臉和安裝角度等5個(gè)參數(shù)對(duì)氣動(dòng)噪聲的影響,結(jié)果發(fā)現(xiàn),除了旋轉(zhuǎn)角度,其他4個(gè)因素對(duì)氣動(dòng)噪聲影響較大。Wang等[12]采用數(shù)值模擬和粒子圖像測(cè)速(particle image velocimetry,PIV)試驗(yàn)對(duì)安裝在平板上的后視鏡進(jìn)行研究,分析后視鏡尾部流場(chǎng)的瞬態(tài)流動(dòng)特性,研究其尾部脫落渦的結(jié)構(gòu),通過(guò)流場(chǎng)分析,對(duì)后視鏡進(jìn)行降噪優(yōu)化。
綜上所述,后視鏡尾部流場(chǎng)中的渦流結(jié)構(gòu)對(duì)氣動(dòng)噪聲起關(guān)鍵作用,國(guó)內(nèi)外對(duì)后視鏡氣動(dòng)噪聲進(jìn)行不少的研究,但多以類(lèi)后視鏡模型作為研究對(duì)象,且采用的是后視鏡-平板的研究方案,對(duì)安裝在整車(chē)上的后視鏡氣動(dòng)噪聲研究較少。現(xiàn)以真實(shí)后視鏡為研究對(duì)象,通過(guò)對(duì)A柱-后視鏡區(qū)域流場(chǎng)和聲場(chǎng)進(jìn)行研究,探究后視鏡內(nèi)側(cè)夾角因素對(duì)氣動(dòng)噪聲的影響,通過(guò)優(yōu)化分析得到降噪效果較好的造型,并對(duì)其降噪原理進(jìn)行研究,為后視鏡的降噪優(yōu)化提供指導(dǎo)作用。
1 氣動(dòng)噪聲理論
1.1 氣動(dòng)聲學(xué)方程
汽車(chē)行駛時(shí)產(chǎn)生的氣動(dòng)噪聲遵循FW-H方程[13],表達(dá)式為
(1)
式(1)中:ρ′為流體密度變化量;ui、vi和vj為速度分量;δij為單位張量;c0為聲速;δ(f)為δ函數(shù);f為作用在流體上的體積力;Pij為壓應(yīng)力張量;τij為黏性應(yīng)力張量。方程左邊描述的是聲音的傳播項(xiàng),右邊第1項(xiàng)為加速度引起的單極子聲源項(xiàng),第2項(xiàng)為由湍流作用造成表面壓力波動(dòng)引起的偶極子聲源項(xiàng),第3項(xiàng)為流體運(yùn)動(dòng)引起的四極子聲源項(xiàng)。而汽車(chē)表面為剛性的,無(wú)明顯形變,且汽車(chē)高速行駛時(shí)屬于低馬赫數(shù)工況(Ma<0.3),因此可以忽略單極子聲源項(xiàng)和四極子聲源項(xiàng)的影響,主要考慮偶極子聲源項(xiàng)對(duì)氣動(dòng)噪聲的貢獻(xiàn)。
1.2 渦聲理論
Lighthill理論雖然將聲場(chǎng)和流場(chǎng)聯(lián)系起來(lái),但是其不能解釋流體發(fā)聲的內(nèi)部機(jī)制和湍流與聲波之間的作用原理。Howe在FW-H方程的基礎(chǔ)上進(jìn)行簡(jiǎn)化,推導(dǎo)出低馬赫數(shù)等熵流動(dòng)的Howe渦聲方程[14-15],表達(dá)式為
(2)
式(2)中:B為流體總焓;u為速度矢量;ρ為流體密度;ω為流動(dòng)渦矢量;符號(hào)×表示叉乘。方程左邊描述了聲在非均勻流動(dòng)介質(zhì)中的傳播,右邊為氣動(dòng)聲源產(chǎn)生項(xiàng)。渦聲方程表明,氣動(dòng)噪聲產(chǎn)生于流場(chǎng)中渦的伸縮和破裂,即只有存在渦的地方,才會(huì)產(chǎn)生氣動(dòng)噪聲[16]。
2 數(shù)值模擬
2.1 幾何模型及計(jì)算域的確定
以某運(yùn)動(dòng)型多用途汽車(chē)(sport utility vehicle,SUV)車(chē)型為基礎(chǔ),通過(guò)CATIA軟件對(duì)車(chē)身外表面建模,保留車(chē)身原有的基本特征,包括前進(jìn)氣格柵、大燈、后視鏡等。為保證車(chē)身模型的仿真結(jié)果的可靠性,需要對(duì)車(chē)身模型不斷檢查和修復(fù),去除翻邊,保證曲面的光順性和連續(xù)性。
為盡可能地模擬汽車(chē)風(fēng)洞試驗(yàn)的真實(shí)流場(chǎng)分布,建立的計(jì)算域的長(zhǎng)度、寬度和高度分別對(duì)應(yīng)車(chē)身長(zhǎng)寬高的9倍、5倍和6倍。其中,車(chē)身前端距離計(jì)算域的入口為3倍的車(chē)身長(zhǎng)度,使氣流能夠充分發(fā)展,保證仿真計(jì)算結(jié)果的準(zhǔn)確性。計(jì)算域模型如圖2所示。
圖1 原后視鏡模型Fig.1 Base rearview mirror model

圖2 整車(chē)計(jì)算域模型Fig.2 Computational domain model
2.2 網(wǎng)格劃分及邊界條件設(shè)置
面網(wǎng)格分為三角形和四邊形網(wǎng)格,要使四邊形網(wǎng)格較好地貼合復(fù)雜幾何表面,需要將網(wǎng)格尺寸設(shè)置得非常密,大大增加了網(wǎng)格數(shù)量,而三角形網(wǎng)格對(duì)復(fù)雜幾何表面具有良好的適應(yīng)性,能夠較好地展示復(fù)雜幾何的真實(shí)表面,因此采用三角形網(wǎng)格。為保證計(jì)算精度的同時(shí)能節(jié)約計(jì)算成本,將模型分為不同區(qū)域進(jìn)行網(wǎng)格尺寸劃分,A柱-后視鏡區(qū)域?yàn)橹攸c(diǎn)研究區(qū)域,網(wǎng)格尺寸對(duì)聲學(xué)計(jì)算精度影響較大,因此對(duì)此區(qū)域進(jìn)行局部加密,后視鏡表面網(wǎng)格尺寸為1~2 mm,A柱和側(cè)窗表面最大網(wǎng)格尺寸為2 mm,車(chē)身表面最大網(wǎng)格尺寸為8 mm,計(jì)算域壁面最大面網(wǎng)格尺寸為256 mm,網(wǎng)格尺寸過(guò)渡方式為漸變式增長(zhǎng),從而使網(wǎng)格質(zhì)量得到保證。由于邊界層對(duì)于仿真計(jì)算結(jié)果具有較大影響,因此邊界層尺寸設(shè)置合理性至關(guān)重要。根據(jù)面網(wǎng)格拉伸生成15層邊界層,邊界層網(wǎng)格采用的是三棱柱網(wǎng)格,首層高度設(shè)置為0.02 mm,增長(zhǎng)率為1.2,邊界層總高度為1.47 mm。邊界層網(wǎng)格劃分完成后,在邊界層和計(jì)算域之間生成四面體網(wǎng)格,整個(gè)計(jì)算域網(wǎng)格總數(shù)大約為3 300萬(wàn)。
在仿真計(jì)算中,氣流是充分發(fā)展的自由流動(dòng),車(chē)尾距離計(jì)算域出口足夠遠(yuǎn),因此可以認(rèn)為,氣流受出口影響較小,為自由流動(dòng),可以當(dāng)作是標(biāo)準(zhǔn)大氣壓。設(shè)置的入口風(fēng)速為140 km/h,根據(jù)馬赫數(shù)的定義,汽車(chē)行駛屬于低馬赫數(shù)工況,Ma<0.3,氣體可以當(dāng)作是不可壓縮流動(dòng)。根據(jù)入口的氣流速度,結(jié)合汽車(chē)氣動(dòng)噪聲仿真的經(jīng)驗(yàn)值,湍流強(qiáng)度設(shè)置為2.5%,邊界條件設(shè)置如表1所示。
表1 計(jì)算域邊界條件Table 1 Boundary conditions of computational domain
2.3 湍流模型的設(shè)置
Realizablek-ε模型通過(guò)構(gòu)建與應(yīng)變率有關(guān)的函數(shù),優(yōu)化湍動(dòng)渦黏系數(shù)中的Cμ。該模型中,引入了與旋轉(zhuǎn)和曲率相關(guān)的內(nèi)容,且在計(jì)算存在大逆壓梯度的邊界層以及有分離和回流流動(dòng)時(shí)更加具有優(yōu)勢(shì)。同時(shí),Realizablek-ε湍流模型對(duì)畸變的網(wǎng)格具有一定修正的作用,因此,穩(wěn)態(tài)計(jì)算時(shí),選用Realizablek-ε湍流模型。穩(wěn)態(tài)計(jì)算的具體設(shè)置如表2所示。
表2 穩(wěn)態(tài)計(jì)算模型設(shè)置Table 2 Steady-state calculation model settings
穩(wěn)態(tài)計(jì)算時(shí),在Fluent中完成湍流模型和邊界條件的設(shè)置后,計(jì)算步數(shù)設(shè)置為2 000步,每個(gè)時(shí)間步長(zhǎng)內(nèi)迭代5次,計(jì)算精度為0.000 1。當(dāng)穩(wěn)態(tài)計(jì)算達(dá)到480步左右時(shí),殘差曲線(xiàn)收斂,如圖3所示。
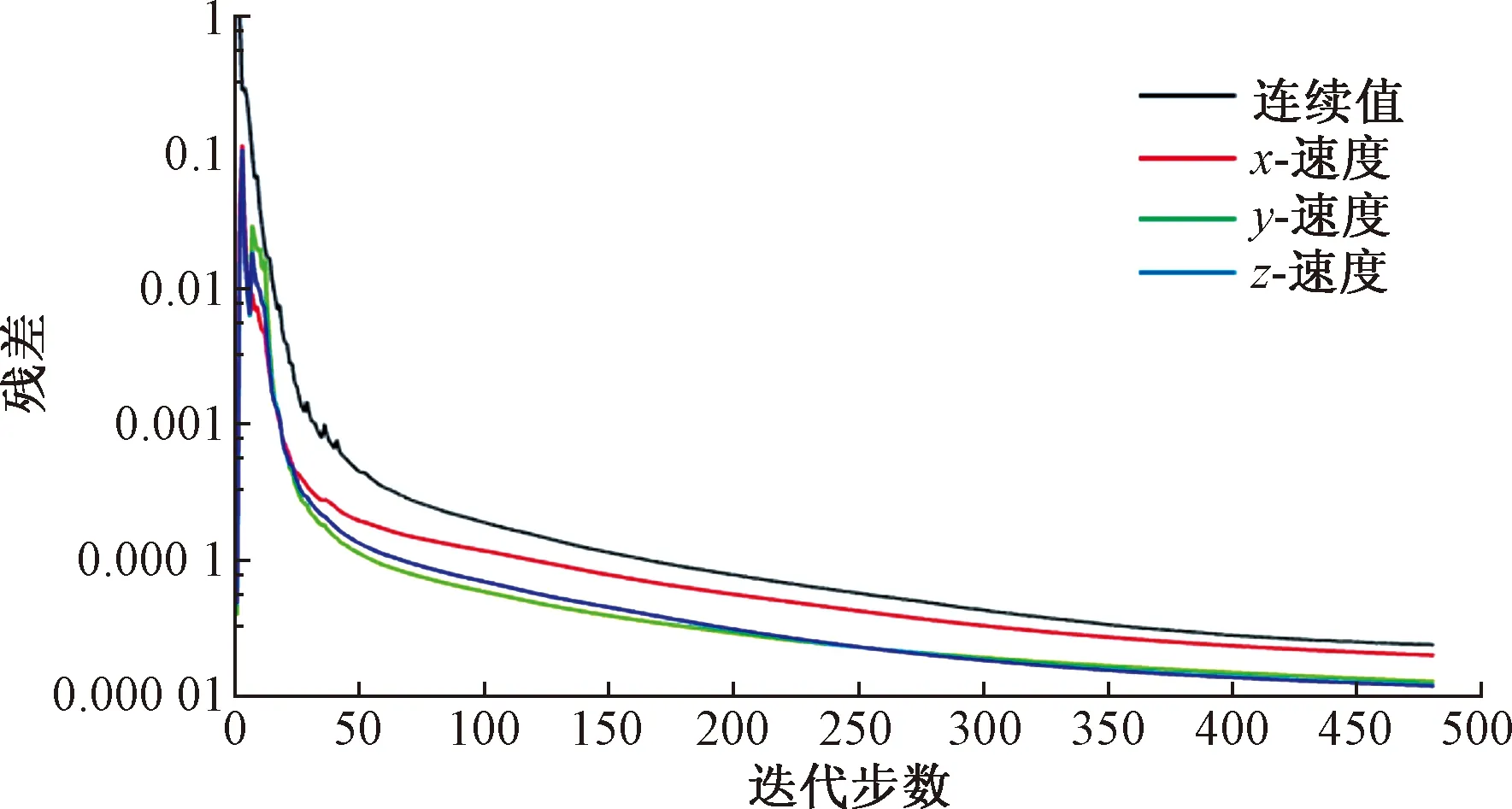
圖3 殘差曲線(xiàn)圖Fig.3 Residual error curve
瞬態(tài)模擬計(jì)算選用大渦模擬(LES),亞格子應(yīng)力模型選用WMLES模型。合理的采樣時(shí)間對(duì)氣動(dòng)噪聲計(jì)算精度有直接影響,為充分反映非定常流動(dòng)特性,采樣時(shí)間需大于5倍的流動(dòng)變化周期[17]。采樣時(shí)間由斯特勞哈爾數(shù)決定,即
St=fd/v
(3)
式(3)中:f為特征頻率;d為特征長(zhǎng)度;v為氣流速度。高雷諾數(shù)下圓柱繞流的斯特勞哈爾數(shù)約為0.2。后視鏡的特征長(zhǎng)度取250 mm,穩(wěn)態(tài)計(jì)算中得到的流速最高為64 m/s,將值代入式(3)中進(jìn)行計(jì)算,可以得到后視鏡流場(chǎng)特征頻率約為51 Hz,也就是流場(chǎng)的特征周期為0.019 s。因此,仿真計(jì)算時(shí),設(shè)置時(shí)間步長(zhǎng)為0.000 02 s,共計(jì)算10 000步,采樣時(shí)間為0.2 s,約為后視鏡流場(chǎng)特征周期的10倍。
瞬態(tài)計(jì)算完成后,可以得到側(cè)窗表面各個(gè)監(jiān)測(cè)點(diǎn)處的脈動(dòng)壓力關(guān)于時(shí)間變化的時(shí)域頻譜圖,為了得到各監(jiān)測(cè)點(diǎn)處的聲壓級(jí)與頻率之間的變化規(guī)律,需要對(duì)壓力脈動(dòng)曲線(xiàn)進(jìn)行傅里葉變換。
快速傅里葉變換(fast Fourier transform,F(xiàn)FT)將時(shí)域信號(hào)轉(zhuǎn)換為頻域信號(hào),便于更好地找出規(guī)律分析問(wèn)題,防止盲目分析問(wèn)題,極大地提高了計(jì)算效率,公式為

(4)

3 整車(chē)風(fēng)洞試驗(yàn)
整車(chē)氣動(dòng)噪聲試驗(yàn)在同濟(jì)大學(xué)的上海地面交通工具風(fēng)洞中心進(jìn)行。該風(fēng)洞為3/4開(kāi)口回流式風(fēng)洞,噴口的面積是27 m2,測(cè)試段的長(zhǎng)度為15 m,軸線(xiàn)方向別的壓力梯度小于0.005 Pa/m,試驗(yàn)的最大風(fēng)速可以達(dá)到250 km/h,背景噪聲的水平為當(dāng)風(fēng)速為160 km/h時(shí),背景噪聲低于61 dB。實(shí)驗(yàn)前,將試驗(yàn)車(chē)停放在試驗(yàn)段的天平轉(zhuǎn)盤(pán)的中心位置固定,車(chē)輪處于靜止?fàn)顟B(tài),并用膠帶將進(jìn)氣格柵、門(mén)窗連接處和底盤(pán)等位置進(jìn)行全密封,防止氣流泄漏產(chǎn)生泄漏噪聲,以確保測(cè)得的噪聲值都是由汽車(chē)外輪廓形狀引起的。試驗(yàn)時(shí),風(fēng)洞試驗(yàn)室溫度穩(wěn)定在24 ℃左右,濕度為36%,試驗(yàn)風(fēng)速分別為90、120、140 km/h,車(chē)輛偏航角為0°。
在前側(cè)窗表面布置GRAS公司生產(chǎn)的表面?zhèn)髀暺鳒y(cè)量側(cè)窗表面脈動(dòng)壓力和聲壓,表面?zhèn)髀暺魃涎b有導(dǎo)流罩,減少“自噪聲”對(duì)試驗(yàn)結(jié)果的干擾,采用HEAD公司的測(cè)試系統(tǒng)進(jìn)行數(shù)據(jù)采集,并將數(shù)據(jù)導(dǎo)入到Artemis軟件進(jìn)行處理和分析。在前側(cè)窗表面4個(gè)區(qū)域布置監(jiān)測(cè)點(diǎn):后視鏡尾流區(qū)、A柱渦流區(qū)、人耳接收區(qū)和相對(duì)穩(wěn)定的附著流動(dòng)區(qū)域,各取一個(gè)監(jiān)測(cè)點(diǎn),如圖4所示,采集并分析其聲壓級(jí)頻譜。
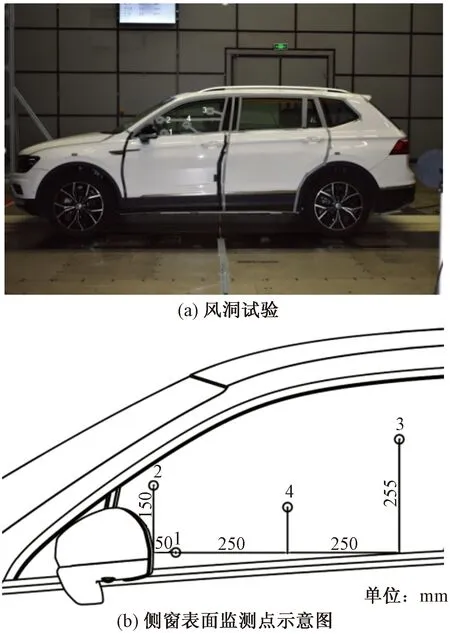
紅色數(shù)字1、2、3、4分別代表監(jiān)測(cè)點(diǎn)1、監(jiān)測(cè)點(diǎn)2、監(jiān)測(cè)點(diǎn)3、監(jiān)測(cè)點(diǎn)4的位置圖4 風(fēng)洞試驗(yàn)和表面?zhèn)髀暺鞅O(jiān)測(cè)點(diǎn)分布圖Fig.4 Wind tunnel test and monitoring points
3.1 仿真和試驗(yàn)對(duì)標(biāo)

圖5 原模型仿真與試驗(yàn)結(jié)果對(duì)比Fig.5 Comparison of simulation and test results of base model
如圖5所示為仿真和試驗(yàn)得到的4個(gè)監(jiān)測(cè)點(diǎn)處的1/3倍頻程A計(jì)權(quán)聲壓級(jí)對(duì)比圖,通過(guò)仿真和試驗(yàn)結(jié)果對(duì)比,結(jié)果表明數(shù)值模擬計(jì)算得到的A計(jì)權(quán)聲壓級(jí)的變化趨勢(shì)和試驗(yàn)結(jié)果一致,最大計(jì)算誤差為4.1 dB,因此可以判斷該數(shù)值模擬方法是合理有效的。
3.2 氣動(dòng)噪聲與行駛速度之間的關(guān)系

圖6 不同風(fēng)速下各監(jiān)測(cè)點(diǎn)處1/3倍頻程A計(jì)權(quán)聲壓級(jí)曲線(xiàn)Fig.6 A-weighted sound pressure level curve of 1/3 octave band at each monitoring point under different wind speeds
為了解氣動(dòng)噪聲與速度之間的關(guān)系,通過(guò)風(fēng)洞試驗(yàn)分別對(duì)90、120和140 km/h共3種風(fēng)速下的氣動(dòng)噪聲進(jìn)行研究,觀(guān)察其4個(gè)監(jiān)測(cè)點(diǎn)處的氣動(dòng)噪聲的變化規(guī)律。如圖6所示為各監(jiān)測(cè)點(diǎn)處在不同風(fēng)速下的1/3倍頻A計(jì)權(quán)聲壓級(jí)曲線(xiàn)圖。
通過(guò)各監(jiān)測(cè)點(diǎn)處的聲壓級(jí)曲線(xiàn),可以看出隨著風(fēng)速的增加,1/3倍頻程A計(jì)權(quán)聲壓級(jí)顯著增加,且在0~1 000 Hz的低頻段,1/3倍頻程A計(jì)權(quán)聲壓級(jí)隨速度的變化不太大,但在1 000~5 000 Hz的中高頻范圍內(nèi)1/3倍頻程A計(jì)權(quán)聲壓級(jí)變化比較明顯,且隨著頻率的增加,聲壓級(jí)隨速度變化越大。因此,可以判斷隨著風(fēng)速的增加,氣動(dòng)噪聲也是逐漸增加,且在1 000~5 000 Hz的中高頻范圍內(nèi)變化較為明顯。
4 后視鏡內(nèi)側(cè)夾角對(duì)氣動(dòng)噪聲的影響
氣流流過(guò)后視鏡表面會(huì)發(fā)生邊界層分離的現(xiàn)象,在后視鏡尾部產(chǎn)生旋渦,引起周?chē)諝鈮毫γ}動(dòng),作用在側(cè)窗表面產(chǎn)生氣動(dòng)噪聲。氣流流經(jīng)后視鏡內(nèi)側(cè)時(shí)會(huì)產(chǎn)生加速現(xiàn)象,因此,后視鏡內(nèi)側(cè)夾角會(huì)影響氣流流過(guò)后視鏡和側(cè)窗之間的速度,進(jìn)而影響后視鏡尾部渦流強(qiáng)度。常見(jiàn)車(chē)型的后視鏡鏡殼夾角的變化范圍一般為-5°~15°,因此等角度選取-5°、0°、5°、+10°和+15°共5個(gè)角度進(jìn)行參數(shù)化試驗(yàn)設(shè)計(jì)。
基于后視鏡-A柱區(qū)域外流場(chǎng)的仿真分析結(jié)果,對(duì)后視鏡內(nèi)部夾角進(jìn)行參數(shù)優(yōu)化,找出最有利于降低后視鏡氣動(dòng)噪聲的夾角參數(shù)。以側(cè)窗表面的平均聲壓級(jí)的降噪率作為試驗(yàn)指標(biāo),評(píng)價(jià)樣本的優(yōu)化效果。降噪率是將原模型氣動(dòng)噪聲的計(jì)算結(jié)果作為參照值,原模型側(cè)窗表面的平均聲壓級(jí)為120.46 dB,分別計(jì)算5個(gè)參數(shù)樣本的降噪率,分析后視鏡鏡殼夾角對(duì)氣動(dòng)噪聲的影響。降噪率計(jì)算公式為
(5)
式(5)中:SPL1為原模型的聲壓級(jí);SPL2為優(yōu)化后模型的聲壓級(jí)。
如表3所示為5個(gè)夾角參數(shù)對(duì)應(yīng)的氣動(dòng)噪聲變化率。

表3 參數(shù)樣本氣動(dòng)噪聲結(jié)果分析Table 3 Analysis of aerodynamic noise results of parameter samples
由表3可知,通過(guò)仿真計(jì)算結(jié)果比較,可以得到正喇叭造型不利于降低后視鏡氣動(dòng)噪聲,當(dāng)側(cè)窗和后視鏡之間的夾角從負(fù)角度變?yōu)檎嵌葧r(shí),氣動(dòng)噪聲逐漸減小,但并不隨著后視鏡與側(cè)窗之間的夾角的增加而無(wú)限減小,當(dāng)夾角為+5°時(shí),氣動(dòng)噪聲降幅最大。因此對(duì)+5°模型展開(kāi)詳細(xì)研究,并通過(guò)流場(chǎng)分析其降噪機(jī)理,優(yōu)化后的夾角方案模型如圖7所示。
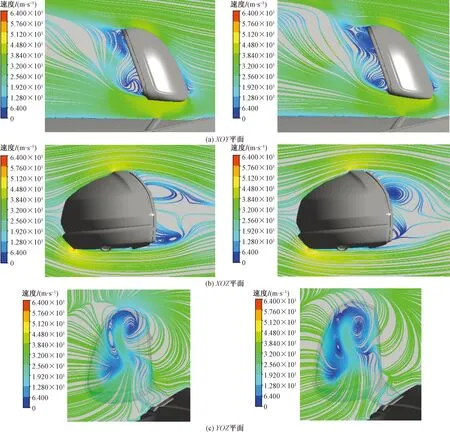
圖8 3個(gè)平面上的流線(xiàn)圖Fig.8 Streamline diagram on three planes
4.1 穩(wěn)態(tài)流場(chǎng)分析
圖8為優(yōu)化模型3個(gè)平面上的流線(xiàn)圖,觀(guān)察圖8可以看出,與原模型相比,優(yōu)化模型的XOY平面上,只有一個(gè)渦團(tuán),且渦團(tuán)尺寸比原模型顯著減小;在XOZ平面上,優(yōu)化模型尾部的渦團(tuán)明顯小于原模型,且流線(xiàn)比較稀疏;在YOZ平面上,優(yōu)化模型尾部旋渦明顯減小,且渦團(tuán)中心沿著-Y方向遠(yuǎn)離側(cè)窗。由于后視鏡鏡殼內(nèi)側(cè)夾角不同,使得流過(guò)后視鏡和側(cè)窗之間的氣流的速度和角度不同,優(yōu)化模型中后視鏡尾部渦團(tuán)尺寸明顯小于原模型,周?chē)諝饷}動(dòng)壓力也會(huì)降低,因此產(chǎn)生的氣動(dòng)噪聲也會(huì)降低。

圖7 夾角優(yōu)化模型Fig.7 Angle optimization model
圖9所示為優(yōu)化模型和原模型的速度云圖的對(duì)比。可以發(fā)現(xiàn),在XOY平面上,優(yōu)化模型尾部的低速區(qū)域面積顯著減小,降低了后視鏡尾部流場(chǎng)中的渦流強(qiáng)度;在XOZ平面上,優(yōu)化模型尾部流場(chǎng)中,上、下兩個(gè)低速區(qū)面積都明顯減小,且下方低速區(qū)與原模型相比,在Z方向上更遠(yuǎn)離側(cè)窗表面,與XOZ平面上流線(xiàn)圖相呼應(yīng)。在YOZ平面上,與原模型相比,優(yōu)化模型中后視鏡上方的低速區(qū)面積減小,有利于減小后視鏡尾部渦流強(qiáng)度。
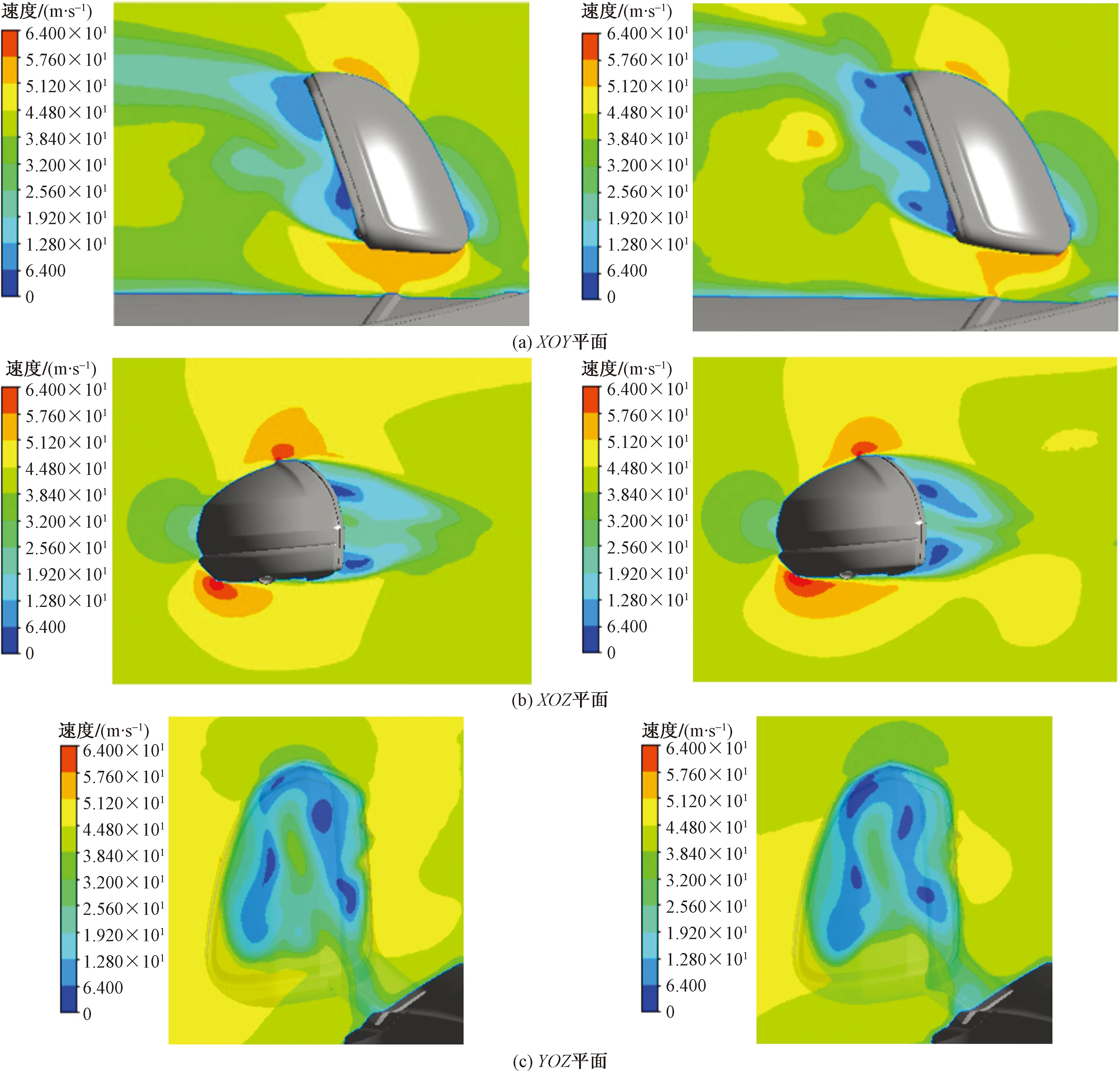
圖9 3個(gè)平面上的速度分布云圖Fig.9 Velocity distribution nephogram on 3 planes
根據(jù)后視鏡尾流場(chǎng)的分析可以得到,通過(guò)鏡殼夾角的優(yōu)化,改變了后視鏡內(nèi)側(cè)的氣流的流速和走向,進(jìn)而減小了后視鏡尾部氣流的分離。在3個(gè)平面上,優(yōu)化模型尾部渦團(tuán)尺寸明顯減小,低速區(qū)域面積顯著減小,降低了后視鏡-A柱區(qū)域的脈動(dòng)壓力,從而使得前側(cè)窗表面的氣動(dòng)噪聲降低。因此,可以認(rèn)為優(yōu)化模型有利于降低側(cè)窗表面的氣動(dòng)噪聲。
圖10為側(cè)窗表面壓力云圖,可以看出,相比于原模型,優(yōu)化模型中,A柱-后視鏡區(qū)域的等壓線(xiàn)比較稀疏,壓力梯度的變化比較小,氣流在此區(qū)域發(fā)生分離和再附著的程度比較小,湍流運(yùn)動(dòng)劇烈程度較小,且負(fù)壓區(qū)面積顯著減小,脈動(dòng)壓力也比較小。因此,在側(cè)窗表面產(chǎn)生的氣動(dòng)噪聲也比較小。
后視鏡內(nèi)側(cè)夾角發(fā)生變化,使得流經(jīng)后視鏡內(nèi)側(cè)和側(cè)窗之間的氣流更加順暢,減小了氣流的分離和再附著,減小了由于旋渦的脫落、破裂而產(chǎn)生的脈動(dòng)壓力,從而降低了側(cè)窗表面的氣動(dòng)噪聲,因此可以認(rèn)為優(yōu)化模型是有利于降低后視鏡氣動(dòng)噪聲的。

圖10 側(cè)窗表面壓力云圖Fig.10 Pressure cloud diagram of side window
4.2 聲壓級(jí)結(jié)果分析
圖11所示為優(yōu)化模型與原模型的監(jiān)測(cè)點(diǎn)聲壓級(jí)頻譜對(duì)比圖,優(yōu)化模型中4個(gè)監(jiān)測(cè)點(diǎn)在中高頻段上的聲壓級(jí)曲線(xiàn)都有所降低,其中監(jiān)測(cè)點(diǎn)1、2、4在1 000~5 000 Hz的中高頻程內(nèi)下降幅度都比較大,其中監(jiān)測(cè)點(diǎn)1中最大聲壓級(jí)降幅為6.8 dB,在監(jiān)測(cè)點(diǎn)3處聲壓級(jí)也有所降低。
因此,根據(jù)以上的分析可以認(rèn)為,后視鏡鏡殼夾角對(duì)后視鏡和側(cè)窗之間的氣流有較大的影響,合理優(yōu)化鏡殼角度可以有效地減小后視鏡尾部低速區(qū)域的面積,降低渦流強(qiáng)度,減小前側(cè)窗處的脈動(dòng)壓力,降低了前側(cè)窗處的氣動(dòng)噪聲。
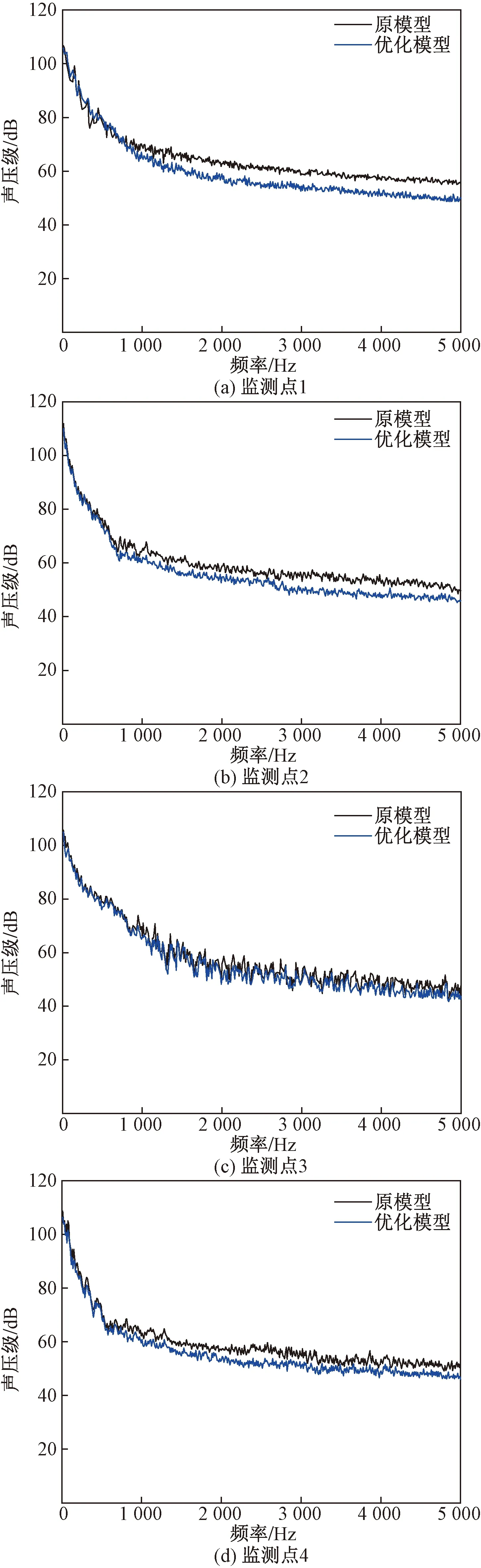
圖11 聲壓級(jí)頻譜圖Fig.11 Sound pressure level spectrum
5 結(jié)論
基于真實(shí)后視鏡模型對(duì)后視鏡內(nèi)側(cè)夾角進(jìn)行研究,通過(guò)等角度設(shè)計(jì)5個(gè)角度進(jìn)行參數(shù)化試驗(yàn)設(shè)計(jì),對(duì)側(cè)窗表面平均聲壓級(jí)進(jìn)行計(jì)算,得到最優(yōu)夾角方案。對(duì)原模型和優(yōu)化模型進(jìn)行仿真計(jì)算得到后視鏡尾部流場(chǎng)的分布情況以及側(cè)窗表面監(jiān)測(cè)點(diǎn)處的聲壓級(jí),通過(guò)風(fēng)洞試驗(yàn)驗(yàn)證了數(shù)值仿真的可靠性,分析了后視鏡夾角優(yōu)化的降噪效果。
(1)通過(guò)風(fēng)洞試驗(yàn)對(duì)不同風(fēng)速下的后視鏡氣動(dòng)噪聲進(jìn)行研究,發(fā)現(xiàn)后視鏡氣動(dòng)噪聲隨著車(chē)速的增加而增加,且在1 000~5 000 Hz的中高頻范圍內(nèi)變化較為明顯。
(2)后視鏡內(nèi)側(cè)夾角優(yōu)化,使得流經(jīng)后視鏡內(nèi)側(cè)和側(cè)窗之間的氣流更加順暢,減小了氣流的分離和再附著,減小了由于旋渦的脫落、破裂而產(chǎn)生的脈動(dòng)壓力,從而降低了側(cè)窗表面的氣動(dòng)噪聲。
(3)通過(guò)對(duì)后視鏡內(nèi)側(cè)夾角進(jìn)行優(yōu)化,監(jiān)測(cè)點(diǎn)1、2、4在1 000~5 000 Hz的中高頻程內(nèi)降噪效果較為明顯,其中監(jiān)測(cè)點(diǎn)1中最大聲壓級(jí)降幅為6.8 dB。
(4)進(jìn)一步的研究將考慮采用優(yōu)化算法對(duì)后視鏡內(nèi)側(cè)夾角進(jìn)行優(yōu)化,以期達(dá)到最優(yōu)的降噪效果。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
