電動汽車動力域控制器設計研究
2022-07-28 02:01:50馬小超
汽車電器 2022年7期
馬小超
(安徽江淮汽車集團股份有限公司 國際公司 海外汽車研究所,安徽 合肥 230051)
1 引言
近年來,隨著汽車加速電動化和智能化,汽車中的電子控制器單元(Electronic Control Unit,ECU)數量激增。據了解,從1993年到2010年,奧迪A8車型上使用的ECU數量從5個驟增至100余個,奧迪A8L裝配的ECU數量在2013年也已超過100個。而隨著電動化快速普及和智能化迅速升級,通過增加ECU數量已非良策。由于不同ECU來自不同供應商,無論是整車功能的開發還是后期的維護升級,車企均需要和這些供應商分別溝通協作,過程繁瑣,整車開發周期也因此拉長,人力物力成本隨之增長。此種背景下,傳統分布式整車電子電氣架構出現集中化演變趨勢,原先相互孤立的ECU相互融合,分組集中控制,域控制器(Domain Control Unit,DCU)應運而生。
借由域控制器,可實現全車100余ECU到少數幾個DCU的變化,控制功能迅速集中,有利于降成本;域控制器具備算力可擴展、更靈活的整車遠程升級(Over-the-air Technology,OTA),使得汽車企業可以為用戶實現不斷迭代升級的功能體驗;更為關鍵的是,域控制器打破了傳統感知+算法+ECU的捆綁式開發模式,多種傳感器的感知數據處理可以實現與控制器計算平臺的數據融合,車輛能夠及時作出更安全的決策。前述的成本、安全或維護升級問題迎刃而解。因此,研究域控制器已成為各大主機企業和電控零部件企業的熱門課題。
2 整車電子電氣架構設計
2.1 域控制器的分類
目前行業對電動車的域控制器暫無統一的分類標準,但從目前來看,域控制器主要有兩種分類方式。一種是按區域劃分,具體可分為前區域控制器、左區域控制器、右區域控制器等,由于集中度較高、技術難度較大等原因,目前僅有特斯拉等少數企業采用這樣的分類方式;此種分類方式對應的整車電子電氣架構中,配置一個中央計算模塊及3個域控制器,分別為前車身域控制器、左車身域控制器、右車身域控制器,如圖1所示。
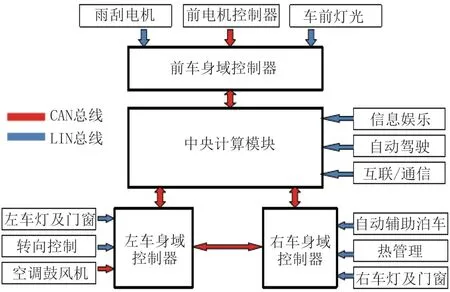
圖1 按區域劃分的域控制器示意圖
相較于上述分類方式,按照功能劃分的方式更為各主機企業接受。目前多數車企或是零部件企業都采用這一方式。從目前來看,主要分類有動力域控制器、底盤域控制器、車身域控制器、座艙域控制器、自動駕駛域控制器等,不同企業間略有差異。其中,動力域控制器,主要集成的是動力總成相關控制功能,主要負責動力總成的優化與控制。隨著新能源汽車電驅和電控系統集成化發展,動力域控制器也越來越多地應用。按功能劃分的域控制器示意如圖2所示。
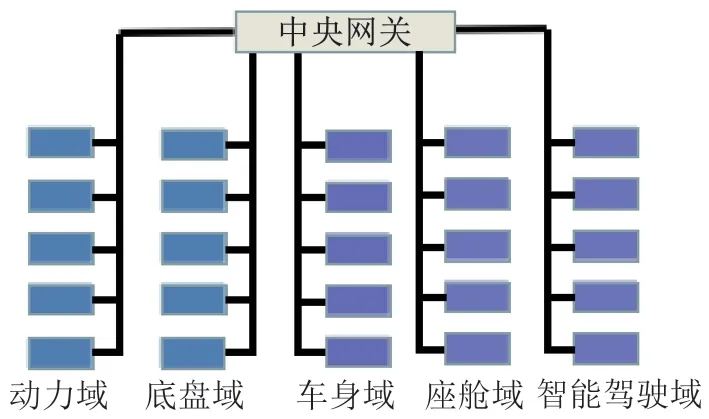
圖2 按功能劃分的域控制器示意圖
本文研究的是一款純電動汽車動力域控制器的設計,該域控制器的劃分方式與前述按功能劃分的方式相似,是一款動力域控制器。但功能與前述略有不同,該動力域控制器集成了動力域及部分底盤部件和車身部件的控制,在整車電子電氣架構中扮演著核心控制作用。為表述和理解方便,下文一律稱為“動力域控制器”。
2.2 本文研究的電動汽車電子電氣架構
本文研究的電動汽車電子電氣架構已由傳統的分布式演變為當前的“三域”架構,如圖3所示。
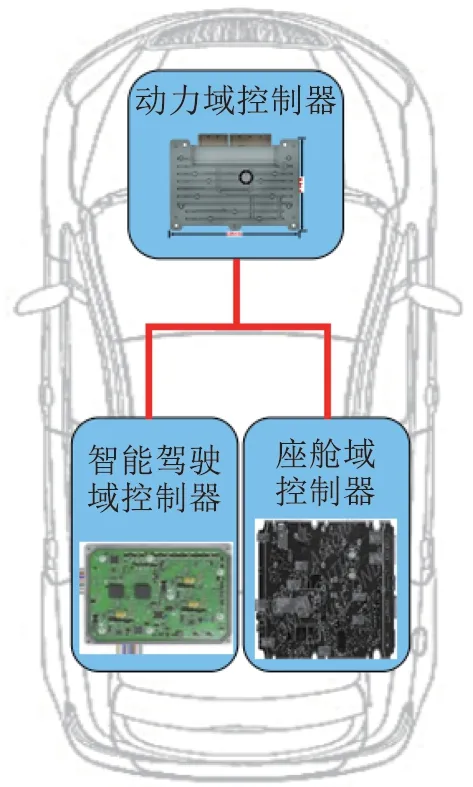
圖3 “三域”整車電子電氣架構示意圖
智能駕駛域控制器,基于環境感知、精準定位、控制與執行等項關鍵技術,實現車道保持、自適應巡航、自動泊車等項功能。座艙域控制器,應用異構操作系統,實現娛樂系統、駕駛員監控、車聯網、OTA和音頻處理功能集成。動力域控制器,是整車智能大腦,實現動力學控制、動力電池核心算法、充電控制、整車一體化熱管理、車身控制和決策的邏輯和算法等。動力域控制器功能集成示意如圖4所示。
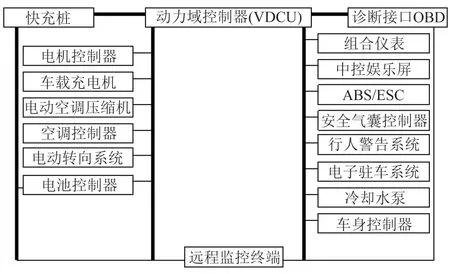
圖4 動力域控制器功能集成示意圖
3 動力域控制器設計
3.1 性能目標
目前主要以博世、德爾福、大陸為代表的國外技術公司長期壟斷動力系統的控制器產品,開發具有自主知識產權、功能性能與國際一流產品相當的動力域控制器,化解電動汽車域控制技術“卡脖子”迫在眉睫。本文研究的電動車動力域控制器,主要性能目標見表1。
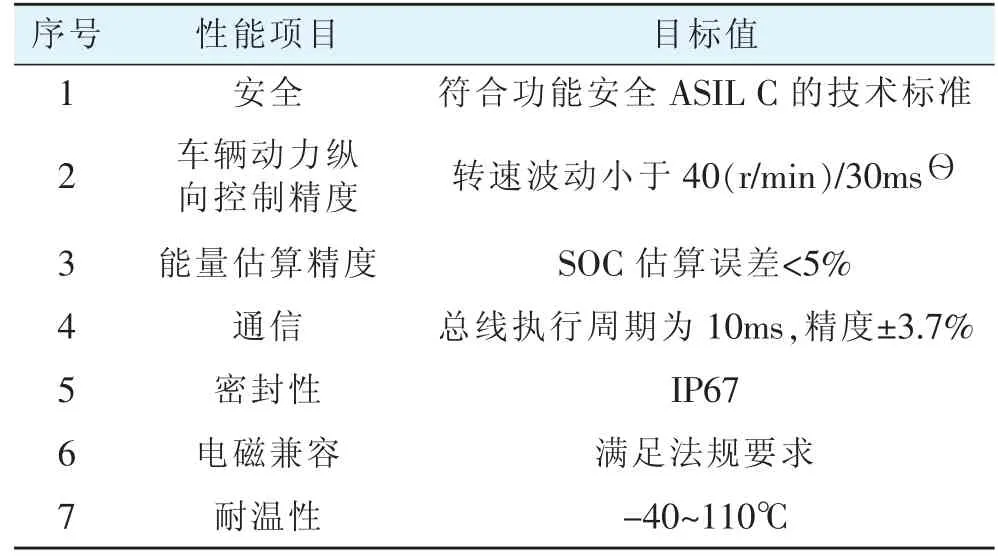
表1 動力域控制器的主要性能目標
3.2 分時復用的硬件
應用分時復用技術,設計動力域控制器的硬件,實現集成整車控制器、空調控制器、中央網關、真空泵控制器、水泵控制器,微處理芯片、電源芯片、存儲芯片分別由原來的5個減少為1個,通信芯片由原來的8個減少為4個。在控制器硬件的安全性能、控制精度、采樣精度和響應水平均提高的情況下,成本下降30%。未集成的5個控制器如圖5所示,集成后的動力域控制器如圖6所示。

圖5 動力域控制器需集成的5個硬件示意圖
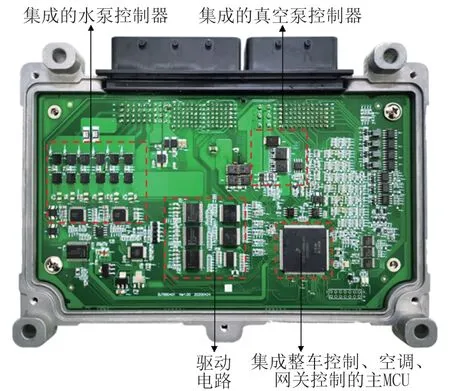
圖6 分時復用的動力域控制器硬件示意圖
3.3 模塊化的應用層軟件
應用Autosar軟件架構,開發虛擬總線軟件模塊,軟件和硬件解耦、應用層軟件解耦,實現軟件模塊可重用、易移植。應用層軟件有模式管理、整車動力學控制、熱管理、智能座艙交互等7個功能模塊、17個子功能。具體見表2。
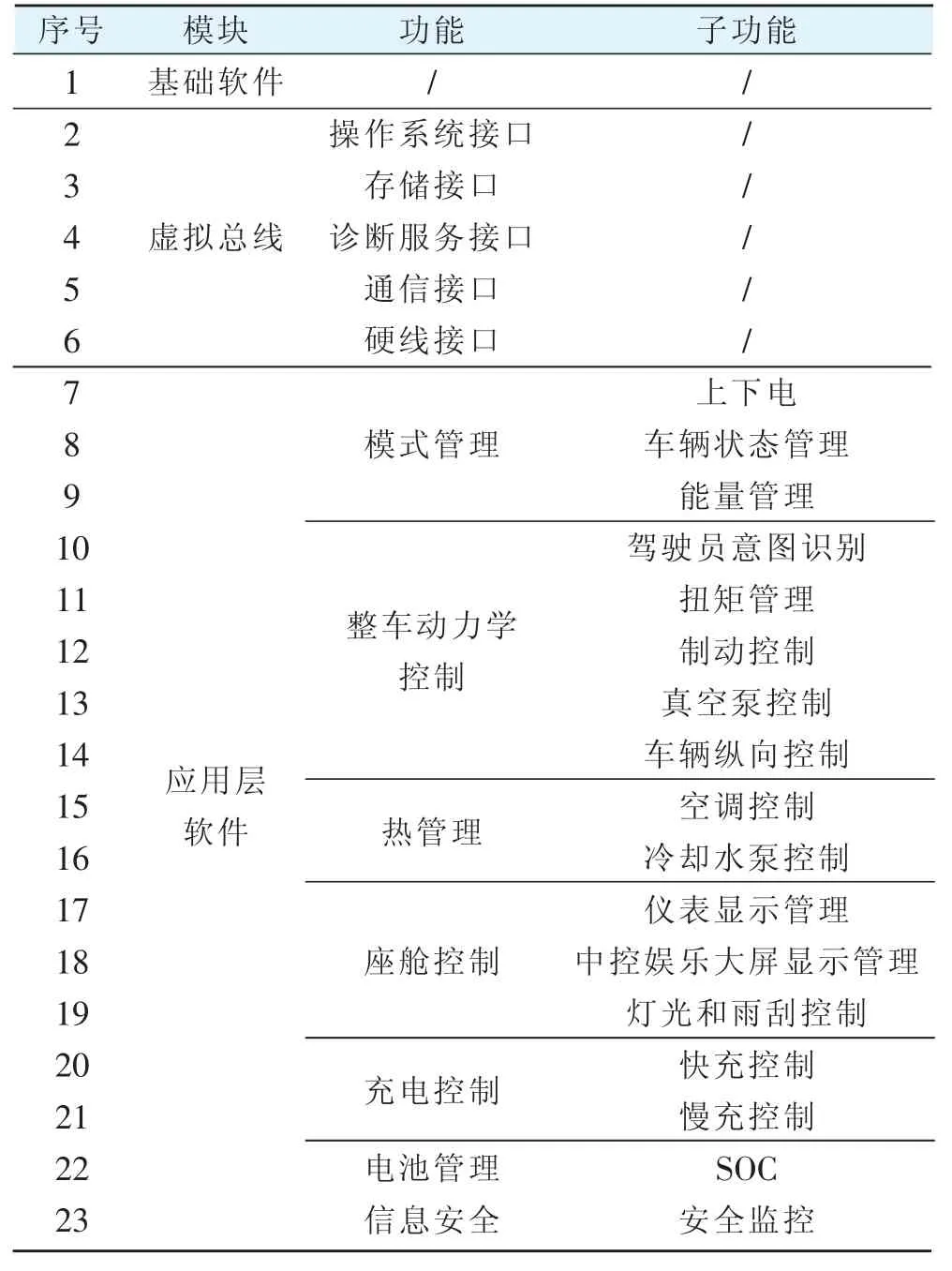
表2 動力域控制器模塊化軟件
3.4 核心功能定義
3.4.1 原子服務功能
在應用層軟件的模塊化、標準化基礎上,進一步識別出不可再分的最小控制單元,建立標準的軟件庫函數和API接口,開發可供不同軟件應用調用的原子服務功能。動力域控制器的應用層軟件根據功能的時序及其功能特性,調用相關的原子服務,開展基于邏輯的組合和排序,實現面向服務的敏捷開發。
本文研究的動力域控制器,開發了8項原子服務功能,包括上下電控制、擋位控制、制動燈控制、轉向燈控制、電子駐車控制、轉向控制、制動壓力控制、電機驅動控制。8個原子服務可以任意分組或任意數量的組合,形成新的整車控制應用軟件,如圖7所示。
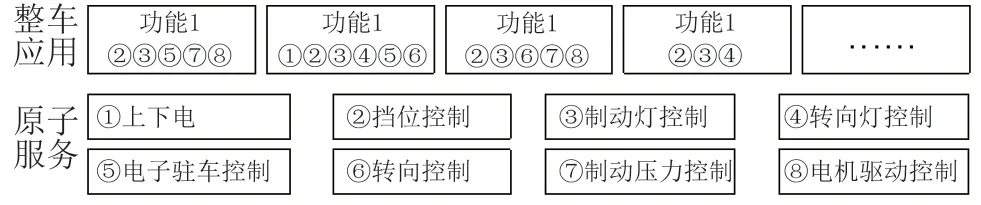
圖7 原子服務功能示意圖
3.4.2 大數據驅動下的服務功能
大數據驅動下的服務建立在由車端的動力域控制器、車載遠程監控終端TBOX和車外的遠程監控云平臺三層架構之上。電動汽車均連接在遠程監控云平臺上,在使用過程中,云平臺實時采集整車數據,應用邊緣計算技術開展用戶駕駛行為分析,并將結果反饋給動力域控制器。基于云端到車端的數字化協調控制,實現千人千面的服務,如圖8所示。
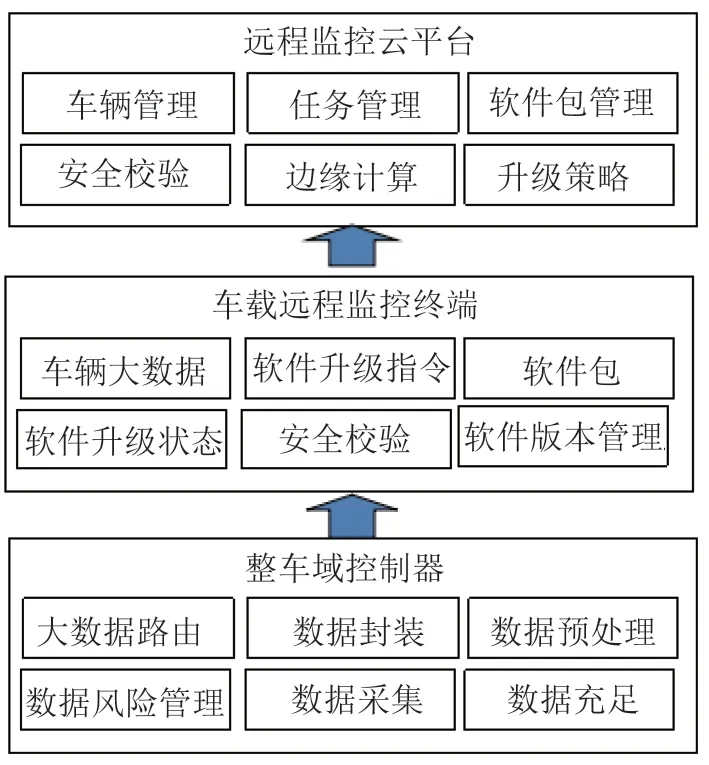
圖8 大數據驅動的服務功能示意圖
3.4.3 信息安全功能
因電動汽車均與遠程監控云平臺連接,本文設計的動力域控制器從車端和云端兩個維度確保整車信息安全,防止車輛被攻擊。
1)車端,3個方面。①協議安全,針對關鍵信號,應用身份認證和信號有效性識別技術,杜絕外接設備發出非法信號造成的干擾;②交互安全,針對跨域的信息交互,基于時間敏感管理完成信號合法性檢查,應用加密算法完成信號正確性檢查;③網絡安全,應用安全網關過濾非法ID,降低網絡泛洪攻擊造成的網絡癱瘓風險。
2)云 端,3個 方 面。①訪 問 安 全,應 用GRE隧 道 和VPN專線技術,保證云端數據與公網物理隔離,降低網絡數據攔截風險;②通信安全,私有化安全交互協議,應用時間戳、底層心跳包,有效抵御中間攻擊和回滾攻擊;③鏈路安全,車端和云端的交互數據應用非對稱秘鑰體系加密,保證業務安全。
4 設計方案驗證
4.1 硬件臺架試驗驗證
根據法規及多年實踐積累的試驗項目,設計了硬件臺架試驗驗證方案,共實施試驗9類86項,試驗全部驗證了動力域控制器的硬件設計可行。其中,最重要的試驗項目有5類15項,見表3。

表3 整域控制器硬件臺架試驗項目及結論
4.2 整車性能試驗驗證
使用本款動力域控制器的整車,為達成整車經濟性、動力性目標,重點針對全加速踏板起步工況、模式轉換工況、駐坡工況開展駕駛性攻關,達到主觀駕駛平順無抖動。整車功能性能試驗結果見表4。
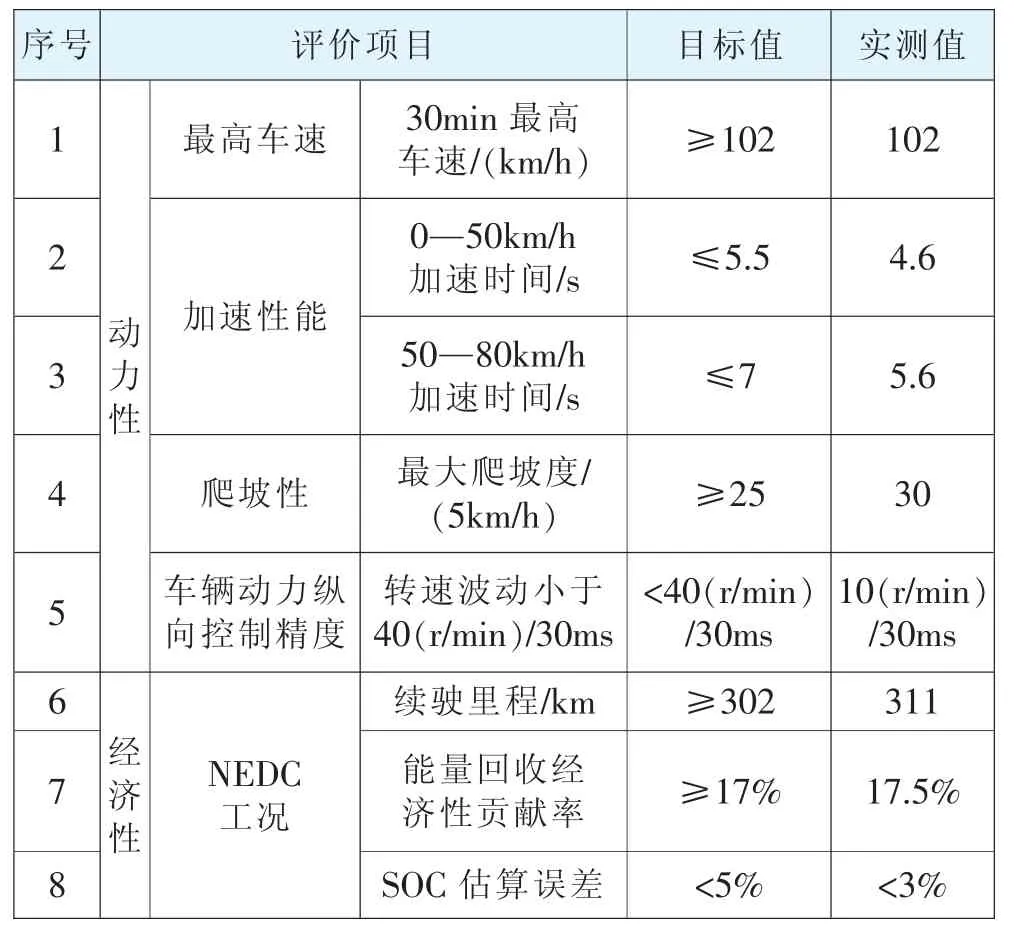
表4 整車性能試驗結論
4.3 整車可靠性試驗驗證
使用該動力域控制器的整車,開展整車可靠性試驗,試驗道路及里程分布見表5,試驗歷時6個月,折合實際使用里程約30萬km,過程中動力域控制器表現出安全、可靠的特性。整車可靠性試驗結論見表5。
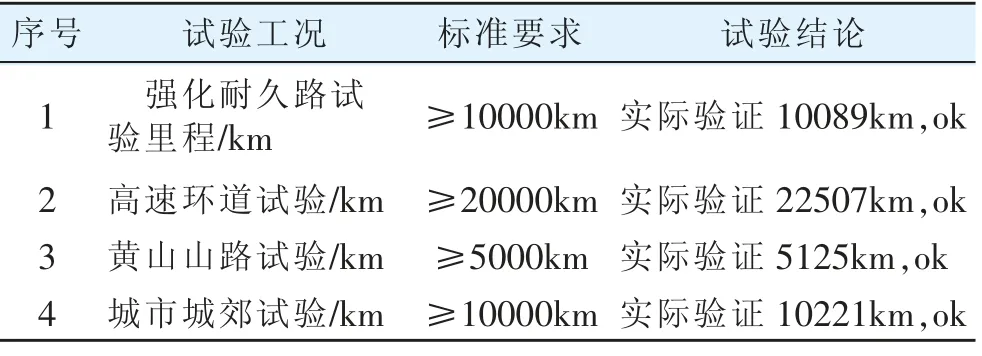
表5 整車可靠性試驗結論
5 總結
本文基于一款純電動汽車設計了整車電子電氣架構及動力域控制器,設定了動力域控制器的性能目標,設計了一種硬件分時復用和軟件模塊化的動力域控制器方案,定義了原子服務功能、大數據驅動下的服務功能、信息安全功能,通過臺架性能試驗、整車性能試驗及整車可靠性試驗結果,驗證了動力域控制器的關鍵性能指標,供純電動汽車域控制器設計開發參考。
