基于振動信號的汽車縱梁腹面沖漏孔智能在線檢測技術
2022-07-26 09:35:34黃中生李靖祥趙升噸
精密成形工程 2022年7期
黃中生,李靖祥,趙升噸
基于振動信號的汽車縱梁腹面沖漏孔智能在線檢測技術
黃中生,李靖祥,趙升噸
(西安交通大學 機械工程學院,西安 710049)
目的 針對傳統汽車縱梁腹面沖孔過程中產生的加工孔漏沖現象,提出一種基于振動信號的智能漏孔在線檢測技術。方法 在縱梁沖孔設備上合理布置加速度傳感器,對采集的振動信號進行時域和頻域特性分析,構建歸一化的壓縮混合域特性指標矩陣,提取正常沖孔和漏沖信號的可靠評價指標,并進一步建立漏孔的智能在線檢測方案。結果 在時域上,漏沖信號的平均值和有效值要比正常沖信號的低,同時具有明顯沖擊峰的波峰個數要少;在頻域上,漏沖信號的頻率幅值最大值、頻率幅值平均值以及能量要比正常沖信號的低,但是其變異系數要比正常沖信號的高。結論 提出了一種智能漏孔檢測方案,可以通過對采集的信號進行預判斷、處理、特征提取、檢測判斷等,分離出漏沖信號和正常沖信號。
汽車縱梁;漏孔;智能檢測;振動信號
汽車底盤連接件一般由縱梁、橫梁以及其他相關附件構成,是汽車底盤組成的必要構件[1]。如圖1所示,縱梁是汽車上不可缺少的受力部件,除了作為承力構件承載著汽車整體絕大部分的重量,還會吸收行駛過程中產生的絕大部分撞擊能量[2]。為了滿足世界環保和節能的要求,汽車工藝也越來越向輕量化方向發展。在縱梁生產中,高強度鋼板使用的比例越來越大,同時對縱梁的強度要求越來越高,對汽車縱梁的制造要求也越來越高。為了滿足安全、耐用等需求,梁類結構需要擁有更高的強度以及更小的變形量,所以梁類的成形加工更加困難,同時加工后也容易發生應力成形回彈現象,進而對梁類的尺寸精度有很大的影響[3-5]。

圖1 汽車縱梁示意圖
目前現有的底盤縱梁裝配孔加工工藝主要有以下3類:(1)傳統的鉆孔工藝,該工藝主要是根據需求先在鋼板上進行劃線,然后根據所劃的加工線進行鉆孔加工,或者根據提前設計好的鉆孔模板進行加工[6];(2)平板縱梁沖孔工藝,相較于傳統的鉆孔工藝,該種加工方式更適用于大批量、少品種的加工,主要采用專用的數控平板沖孔線,該種加工方式不需要額外的鉆孔模板或者沖孔模,其適用范圍以及加工柔性使該種加工方式成為目前最符合汽車縱梁沖孔加工的工藝[6-7];(3)U形縱梁沖孔工藝,相較于傳統的鉆孔工藝和平板縱梁沖孔工藝,該種加工方式多用于進行小批量、多品種的加工,主要采用專門的數控三面沖孔生產線,直接對已經成形的U形縱梁進行加工,不需要像平板縱梁加工時那樣使用額外的壓力機成形U形縱梁,因此其加工精度較高[8-9]。
在現有的縱梁沖孔工藝生產中,調模的失誤或者模具沖針的突然斷裂,或者是操作者本身在操作過程中的操作失誤都會產生裝配孔漏沖的現象,而目前還是主要依靠人工目測對縱梁沖孔漏孔進行檢測,該種方式自動化程度低、效率不高,而且容易產生誤差。
國內外學者在如何實現縱梁漏孔的智能在線檢測方面做了大量的工作。早在1980年,Blitchington等[10]發明了一種對板上已有沖孔進行計數和檢測的裝置。同樣,武漢科技大學也設計出了一種利用圖像處理技術對汽車縱梁安裝孔進行檢測的裝置,如圖2所示[11],該裝置利用自制的小車在加工完的縱梁上來回移動,通過小車上的CCD工業相機對縱梁整體進行掃描,然后通過軟件對縱梁上的安裝孔進行計數,進而判斷是否存在漏孔。

圖2 武漢科技大學設計的沖孔尺寸檢測裝置[11]
目前對汽車縱梁安裝孔進行漏孔檢測的技術絕大多數還是基于機器視覺、圖像處理等手段[12-13],這些技術一般對環境要求比較苛刻,同時基于此類技術設計的檢測裝置容易受光源影響,進而影響檢測速度[14],檢測裝置一般也是在沖孔完成后進行檢測,檢測結果實時性較差。因此,文中在前人研究的基礎上,對正常沖孔和漏沖過程進行采集實驗,對正常沖孔振動信號和漏沖振動信號進行特性分析和特征提取,提出了一種基于振動信號的智能漏孔檢測技術。
1 縱梁沖孔過程振動信號的采集
1.1 縱梁沖孔的沖孔原理
常見沖孔設備的腹面沖孔主機單元主要由腹面大主機床身、腹面小主機床身、主機底座、方向移動底座、大主機前檢測、小主機前檢測等組成,與其相鄰的還有廢料輸送裝置、模具部件、壓料部件等[15-16]。
沖孔設備的工作原理如下:先將加工程序輸入到數控系統中,同時外部上料機構開始工作,將U形縱梁運送到生產線上,大、小腹面沖孔液壓缸在電機的帶動下進行豎直向下的運動;運動一段時間后,大、小腹面沖孔主機根據預先設定在數控系統中的程序對運送過來的U形縱梁進行移動定位,定位完成后對縱梁進行壓邊操作,之后液壓缸開始工作,推桿對U形縱梁進行沖孔;完成沖孔動作后,電機帶動大、小腹面沖孔液壓缸進行向上的回程運動。
1.2 縱梁沖孔的振動信號采集實驗
由1.1節內容可知,汽車U形縱梁在沖孔過程中會經歷3個階段:第1階段是大、小腹面沖孔機在電機的帶動下向下的行進運動;第2階段是腹面沖孔機在液壓作用下向下的沖孔運動;第3階段是腹面沖孔機在電機帶動下向上的回程運動。這3個階段也表示了沖孔機的加速度經歷了3個階段,因此文中通過在腹面沖孔設備上增加多個振動加速度傳感器來對汽車U形縱梁沖孔過程中振動加速度的變化情況進行采集,圖3為文中使用的縱梁沖孔實驗設備。

圖3 縱梁腹面沖孔實驗設備
實驗中,在沖孔設備模具運動部件上安裝振動加速度傳感器1#,在固定機架位置上安裝振動加速度傳感器2#,傳感器1#和2#分別用來采集正常沖孔過程和漏沖時的振動信號。通過對2種傳感器采集到的振動信號進行分析和比較,最終確定使用傳感器1#采集到的振動信號。
2 縱梁沖孔振動信號的分析與特征提取
2.1 縱梁沖孔振動信號的處理
通過振動信號采集實驗,采集了縱梁腹面沖孔設備在沖孔過程中產生的振動信號,從數據中分類篩選出產生漏沖現象的漏沖振動信號以及未產生漏沖現象的正常沖孔振動信號。通過本次實驗,總計得到振動信號944組,其中漏沖信號256組,正常沖孔信號688組。
圖4為正常振動信號和漏沖信號的時頻圖,可以看出,2類信號均在低頻段內存在能量集中的現象,而正常沖孔時信號的時頻圖上有3條明顯的光帶,表示了沖孔過程中的3個過程:沖孔機整體的豎直下落過程;沖孔機沖頭的正常沖孔過程;沖孔機整體的回程上升過程。漏沖信號相比正常信號缺失了正常沖孔過程中沖頭和機架共振產生的能量集中現象,因此時頻圖僅存在2條明顯的光帶。

圖4 2類振動信號時頻圖
2類信號時頻域的分析流程和特征提取的流程如圖5所示。首先對采集到的原始振動信號進行預處理,包括濾波、降頻以及去除直流分量;然后分別在時域和頻域上對信號進行再次處理,包括傅里葉變換、經驗模態分解等;最后分析對比提取出的時域以及頻域的特征參數,得出2類信號的差異。
2.2 縱梁沖孔振動信號的時域分析及特征提取
振動信號的時域特征值主要分為2類:有量綱特征值和無量綱特征值,文中主要使用了平均值、有效值、峰值、峰峰值、峰值因子、峭度、波形因子、脈沖因子、裕度因子和能量(分別對應圖6中特征值1—10)作為10類時域的特征參數,如圖6所示,任取96組漏沖信號和96組正常信號作為訓練樣本,提取計算出兩者的時域特征值進行對比。可以看出,經過處理后,時域下的故障振動信號和正常信號在特征值1、特征值2、特征值3、特征值4以及特征值10上具有比較明顯的差異,據此可以假設:在縱梁沖孔過程中,由漏沖產生的振動信號在時域內的平均值、有效值和能量均要低于未產生漏沖現象的正常振動信號的。

圖5 振動信號分析流程

圖6 正常沖信號和漏沖信號的時域特征值對比
從漏沖振動信號和正常沖孔振動信號的沖孔過程和時頻圖可以看出,故障信號和正常信號在振動加速度曲線上最明顯的表現為缺少了沖頭正常沖孔過程中由于振動產生的波峰,因此可以對2類信號在時域有限范圍內進行多次曲線包絡,突出振動信號的振動波峰,如圖7所示,通過確定合適的幅值閾值和時間閾值,計算振動信號滿足閾值要求的極值點及拐點,統計振動信號具有明顯振動峰的個數,據此對2類信號進行區分。

圖7 經包絡處理后的2類振動信號
通過對縱梁腹面沖孔過程中產生振動信號的時域進行分析和研究,可以得出以下判斷:在時域特征值方面,正常沖孔信號在時域上的平均值、有效值和能量明顯高于漏沖信號的;在時域有限范圍內,對振動信號進行數次的曲線包絡,正常沖孔信號具有明顯振動峰的波峰個數比漏沖信號的多1個,符合沖孔過程中運動加速度的變化規律,通過確定幅值閾值和時間閾值,計算滿足要求的極值點個數進而對2類信號進行區分。
2.3 縱梁沖孔振動信號的頻域分析及特征提取
由2.2小節可以得知,在時域上,可以通過對預處理后的振動信號進行特征參數提取來判斷縱梁沖孔過程中是否產生了漏沖現象。在實際工程中,基于監測和識別振動信號頻譜圖的故障診斷技術應用廣泛[17]。文中使用的頻域特征參數有頻率幅值均值、頻率幅值最大值、偏度、重心頻率、均方頻率、頻率標準差、峰度和變異系數(分別對應圖8中特征值1¢—8¢)。
正常沖孔信號和漏沖信號的頻域特征值對比如圖8所示,橫坐標對應所使用的頻域特征參數,任取96組漏沖信號和96組正常信號作為訓練樣本,對比從中提取計算出的頻域特征值。可以看出,漏沖振動信號和正常沖孔振動信號在頻域上的特征值1¢、特征值2¢和特征值8¢具有比較明顯的差異,由此可以假設:在縱梁沖孔過程中,由漏沖產生的振動信號在頻域內的頻率幅值平均值、頻率幅值最大值要低于未產生漏沖現象的正常振動信號的,而變異系數要高于未產生漏沖現象的正常振動信號的。
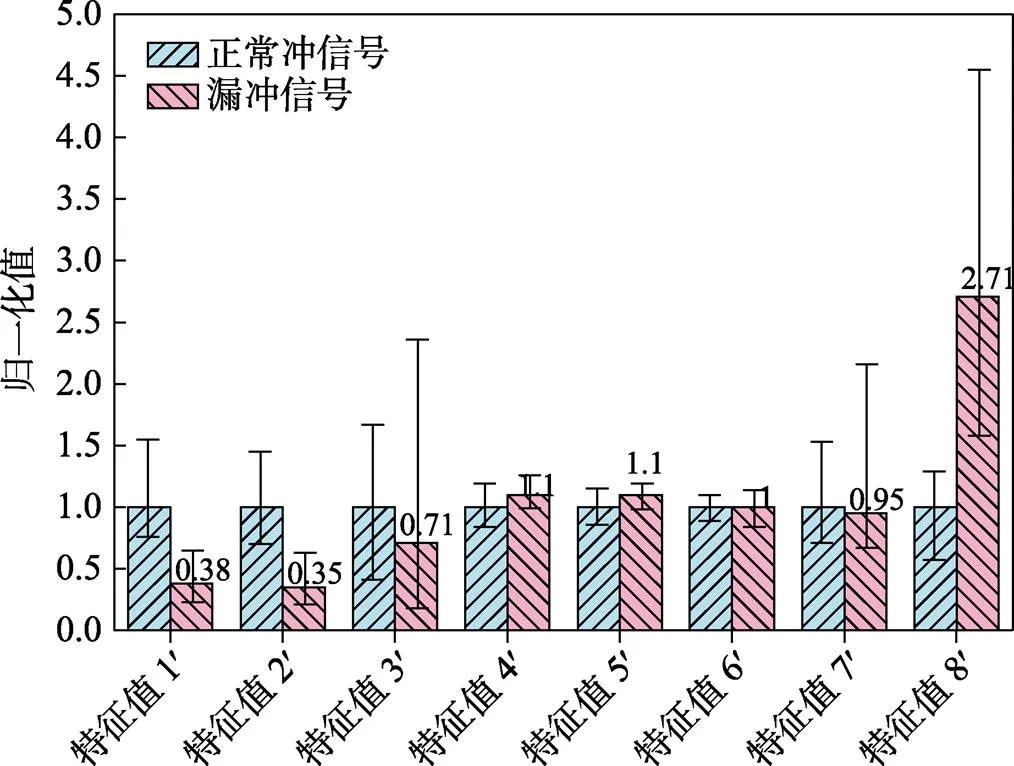
圖8 正常沖孔信號和漏沖信號的頻域特征值對比
通過對縱梁腹面沖孔過程中產生振動信號的頻域進行分析和研究,可以得出以下判斷:在頻域特征值方面,正常沖孔信號在頻域上的頻率幅值平均值、頻率幅值最大值明顯高于漏沖信號的,而其變異系數是要低于漏沖信號的。
2.4 縱梁沖孔振動信號的特征值聚類分析
為了突出正常沖孔信號和漏沖信號的特征值差異,文中采用基于核方法改進的模糊均值(KFCM)聚類分析方法[18],對2類信號的特征值進行3次聚類分析。KFCM算法的聚類目標函數見式(1)—(2)。


式中:為類別數;為樣本數;μ為隸屬度;為模糊加權指數;v為聚類中心;x為原始特征空間樣本;m為聚類目標函數。
為了判斷聚類效果的好壞程度,通常采用分類系數和平均模糊熵進行評價,其定義分別見式(3)和式(4)。

分類系數是表示聚類結果模糊程度的標準,越接近1,則說明樣本的聚類效果越好。若=1,聚類結果屬于硬劃分;若<1,聚類結果屬于模糊劃分。平均模糊熵表示聚類劃分的不確定性,對于硬劃分有=0,對于模糊劃分有>0,因此越接近0,樣本聚類效果越好。
本次共使用了96組正常沖振動信號以及96組漏沖振動信號作為訓練樣本進行模糊均值聚類分析,所使用的信號特征值總計72組,包括原有時域上的10種以及頻域上的8種特征參數,以及對信號進行經驗模態分解后得到的前3項本征模態分量對應的時頻特征參數。對所有信號的特征值進行故障信號以及正常信號總計2類的劃分,所劃分的特征設置為3類,因此總計59 640組數據,共進行3次聚類分析,并依據式(3)—(4),分別對所獲得的分類結果進行分類系數以及平均模糊熵的計算。
從分類結果中選取6組作圖,如圖9所示,其中結果1的分類系數為0.927 7,平均模糊熵為0.139 7;結果2的分類系數為0.926 9,平均模糊熵為0.141 9;結果3的分類系數為0.926 7,平均模糊熵為0.142 4;結果4的分類系數為0.911 8,平均模糊熵為0.156 4;結果5的分類系數為0.900 1,平均模糊熵為0.171 9;結果6的分類系數為0.885 1,平均模糊熵為0.189 5。分類系數越接近1,分類效果越好,表示正常信號和漏孔信號的樣本點分離距離越大,圖9中圓點表示聚類中心,分類系數不同,樣本點分布在聚類中心周圍的緊密程度也不相同。

圖9 聚類分析結果
通過對訓練樣本進行聚類分析,發現對任意縱梁腹面沖孔的振動信號進行時域與頻域的特征提取后,可以使用平均值、有效值、能量、頻率幅值均值、頻率幅值最大值和變異系數構建壓縮混合域特性指標,作為區分正常沖振動信號和漏沖振動信號的區分條件。
3 縱梁沖孔漏孔檢測算法的提出
通過2.2節和2.3節對振動信號時域和頻域上特征參數的分析和研究,文中針對汽車縱梁腹面沖孔工藝中的漏沖現象,得出一個基于振動信號的初步檢測方案,其算法流程如圖10所示。
該檢測方案期望能夠在較短時間內通過對振動信號傳感器采集到的振動信號進行處理和判斷,對沖孔設備的沖孔過程進行檢測,從而判斷沖孔時是否產生了漏沖孔現象,如果有,則及時向上位機發出報警信號。
該檢測算法流程以振動信號為輸入,最后輸出判斷結果,主要流程如下:(1)首先對采集到的信號進行均值和峰值計算,判斷是否為振動信號;(2)對輸入的信號進行前處理,主要目的是濾除噪聲信號,同時去除信號中的直流分量;(3)對信號進行特征提取,時域上,對振動信號進行EMD分解,取其本征模態分量前4項之和作為新的振動信號,然后計算其時域上的特征值,頻域上,對振動信號進行傅里葉變換,
然后計算其頻域上的特征值;(4)漏沖檢測的綜合判斷由3部分構成,第1部分是對振動信號時域特征參數進行閾值判斷,第2部分是對振動信號在時域有限范圍內進行多次曲線包絡,依據設定的幅值閾值和時間閾值,計算并統計振動信號具有明顯振動峰的個數,第3部分是對振動信號中頻域特征參數進行閾值判斷;(5)最后輸出結果,依據漏沖檢測部分判斷的結果向上位機輸出是否有漏沖現象產生,如果有,則及時進行報警。
為了驗證該檢測算法的合理性,文中使用編程軟件對檢測算法流程進行了程序編寫,以輸入信號為開始,經過一系列處理后,進行漏沖檢測,最后輸出判斷結果。測試結果采用混淆矩陣圖表示,如圖11所示,總共使用了60組測試樣本,其中28個正常信號和29個漏沖信號的檢測正確,分別占比46.7%和48.3%,有2個正常信號被檢測判斷為漏沖,1個漏沖信號被判斷為正常,分別占比3.3%和1.7%,針對30個無漏孔信號和30個漏孔信號,檢測出28個正常信號和29個漏孔信號,說明正常信號的查全率是93.3%,漏孔信號的查全率是96.7%,正常沖孔信號和漏孔信號的查準率分別為96.6%和93.5%,總的檢測準確率為95%,同時統計所有測試樣本的檢測時間,其中正常信號和漏孔信號的檢測時間基本一樣,均為0.264 s左右,可以認為檢測程序能夠滿足在線實時性要求。

圖10 檢測算法流程圖

圖11 檢測系統驗證混淆矩陣圖
4 結論
通過對縱梁腹面沖孔工藝中產生的振動信號進行分析和研究,得到如下結論。
1)在分析縱梁腹面柔性化沖孔工藝的基礎上,在現有腹面沖孔設備上合理安裝振動加速度傳感器,測試比較沖孔過程中產生的正常振動信號和漏沖信號。正常沖孔信號主要經歷沖頭豎直下落、沖孔、回程上升3個階段,而漏沖信號中沖孔部分信號缺失。
2)通過對縱梁沖孔過程中產生漏沖現象的故障信號和未產生漏沖現象的正常信號進行典型時頻域特征分析,發現正常沖孔信號在時域上的平均值、有效值以及能量等特征參數明顯高于漏沖信號的,在頻域上的頻率幅值平均值、頻率幅值最大值明顯高于漏沖信號的,而其變異系數是要低于漏沖信號的。此外,通過時域幅值包絡信號分析,確定了檢測正常沖孔信號和漏沖信號的幅值閾值以及時間閾值,獲得了明確的振動峰數量。
3)基于上述分析,提出了一種基于縱梁腹面沖孔振動信號的漏沖智能實時在線檢測方案和算法流程,通過實驗數據得出所設計的漏沖檢測方法單組數據檢測時間低于0.264 s,綜合檢出率為95%,滿足在線檢測的要求。
[1] 趙加蓉. 從制造到智造——汽車縱梁柔性制造新模式[J]. 汽車工藝師, 2016(8): 20-23.
ZHAO Jia-rong. From Manufacturing to Intelligent Manufacturing-a New Flexible Manufacturing Mode of Automobile Longitudinal Beam[J]. Auto Manufacturing Engineer, 2016(8): 20-23.
[2] 李彩娟, 程阿苗, 詹卓, 等. 汽車縱梁加強板成形工藝優化與模具設計[J]. 模具制造, 2019, 19(9): 20-22.
LI Cai-juan, CHENG A-miao, ZHAN Zhuo, et al. Forming Process Optimization and Die Design of Strengthened Plate for Automobile Longitudinal Beam[J]. Die & Mould Manufacture, 2019, 19(9): 20-22.
[3] 丁金明. 金屬鍍層工件表面缺陷自動檢測系統的研究[D]. 天津: 天津大學, 2004: 57-58.
DING Jin-ming. Study on Auto-Detect System for Detecting Defects of Workpieces Electroplated Surface[D]. Tianjin: Tianjin University, 2004: 57-58.
[4] CABELLO E, SáNCHEZ M, DELGADO J. A New Approach to Identify Big Rocks with Applications to the Mining Industry[J]. Real-Time Imaging, 2002, 8(1): 1-9.
[5] 劉世竹, 世萍, 朱培禮, 等. 大尺寸量具檢測裝置的研制[J]. 鐵道技術監督, 2002, 30(2): 32-34.
LIU Shi-zhu, SHI Ping, ZHU Pei-li, et al. Development of Testing Device for Large-Size Measuring Tools[J]. Railway Quality Control, 2002, 30(2): 32-34.
[6] 何夢輝, 宋曙平, 李大鵬. 淺談汽車底盤縱梁沖孔加工設備的應用與前景[J]. 鍛壓裝備與制造技術, 2016, 51(1): 68-69.
HE Meng-hui, SONG Shu-ping, LI Da-peng. Application and Prospect of Punching Equipment for Truck Chassis Side-Member[J]. China Metal Forming Equipment & Manufacturing Technology, 2016, 51(1): 68-69.
[7] 王立勤, 劉向群. 淺談汽車縱梁加工設備——縱梁平板數控沖孔線[J]. 鍛壓裝備與制造技術, 2005, 40(4): 35-37.
WANG Li-qin, LIU Xiang-qun. Talking about the Processing Equipment of Automobile Longitudinal Beam-CNC Punching Line of Longitudinal Beam Flat Plate[J]. China Metalforming Equipment & Manufacturing Technology, 2005, 40(4): 35-37.
[8] 宋曙平, 何夢輝, 李永剛, 等. 一種新型的U形梁物料管理生產線[J]. 鍛壓裝備與制造技術, 2015, 50(1): 13-15.
SONG Shu-ping, HE Meng-hui, LI Yong-gang, et al. A New Material Management Production Line for U-Shaped Beam[J]. China Metal Forming Equipment & Manufacturing Technology, 2015, 50(1): 13-15.
[9] 遲志波, 趙加蓉, 何夢輝. 國內汽車縱梁數控沖孔生產線的發展動向[J]. 數控機床市場, 2009(9): 51-56.
CHI Zhi-bo, ZHAO Jia-rong, HE Meng-hui. The Development Trend of Domestic Automobile Longitudinal Beam CNC Punching Production Line[J]. CNC Machine Tool Market, 2009(9): 51-56.
[10] BLITCHINGTON F H. Methods of System for Counting Holes and for Ddetecting Missing Holes in a Web: US4205769[P]. 1980-06-03.
[11] 周奎. 圖像處理在汽車縱梁漏孔檢測中的應用和研究[D]. 武漢: 武漢科技大學, 2006: 23-24.
ZHOU Kui. Study and Implementation of Image Processing in Detecting Missing Hole on Auto-Carling[D]. Wuhan: Wuhan University of Science and Technology, 2006: 23-24.
[12] 程存學, 劉世棟, 解莉. 基于視頻圖像分析的智能監控系統設計[J]. 計算技術與自動化, 2006, 25(S2): 162-165.
CHENG Cun-xue, LIU Shi-dong, XIE Li. Design of the Intelligent Surveillance System Based on the Analysis of Vedio Images[J]. Computing Technology and Automation, 2006, 25(S2): 162-165.
[13] 卞曉東. 基于機器視覺的車輛幾何尺寸測量系統研究[D]. 南京: 東南大學, 2005: 8-11.
BIAN Xiao-dong. Research on Vehicle Dimensions Measuring System Based on Machine Vision[D]. Nanjing: Southeast University, 2005: 8-11.
[14] 賀賽先, 王新華, 何對燕, 等. 一個基于圖像測量的工業尺寸測量系統[J]. 測繪通報, 1997(5): 25-26.
HE Sai-xian, WANG Xin-hua, HE Dui-yan, et al. An Industrial Dimension Measurement System Based on Image Measurement[J]. Bulletin of Surveying and Mapping, 1997(5): 25-26.
[15] 李耶夫, 薛麗菲. 汽車U型縱梁四主機三面數控沖孔生產線淺析[J]. 汽車制造業, 2014(18): 68-69.
LI Ye-fu, XUE Li-fei. Analysis on the CNC Punching Production Line of Automobile U-shaped Longitudinal Beam, Four Mainframes and Three Sides[J]. Automobil Industrie, 2014(18): 68-69.
[16] 李耶夫, 薛麗菲. 汽車U形縱梁雙主機數控沖孔生產線技術淺析[J]. 鍛造與沖壓, 2014(4): 36-38.
LI Ye-fu, XUE Li-fei. Analysis on the CNC Punching Production Line of Auto U-Shaped Longitudinal Beam with Dual Hosts[J]. Forging & Metalforming, 2014(4): 36-38.
[17] 鄭杰峰, 朱孔臣, 張正軍, 等. 振動信號分析技術在汽輪機故障診斷中的應用[J]. 設備管理與維修, 2020(15): 143-146.
ZHENG Jie-feng, ZHU Kong-chen, ZHANG Zheng-jun, et al. Application of Vibration Signal Analysis Technology in Turbine Fault Diagnosis[J]. Plant Maintenance Engineering, 2020(15): 143-146.
[18] WU Zhao-hua, HUANG N E. Ensemble Empirical Mode Decomposition: A Noise-Assisted Data Analysis Method [J]. Advances in Adaptive Data Analysis, 2009, 1(1): 1-41.
Intelligent Online Detection Technology for Missing Punching of Machining Holes on Ventral Surface of Automobile Carling Based on Vibration Signal
HUANG Zhong-sheng, LI Jing-xiang, ZHAO Sheng-dun
(School of Mechanical Engineering, Xi'an Jiaotong University, Xi'an 710049, China)
The work aims to propose an intelligent online leak detection technology based on vibration signal to solve the phenomenon of missing punching of machining holes in the traditional automobile carling ventral punching process. By reasonably arranging the acceleration sensors on the carling punching equipment, the time domain and frequency domain characteristics of the collected vibration signals were analyzed, a normalized compressed mixed domain characteristic index matrix was constructed, and the reliable evaluation indicators for normal punching and missing punching signals were extracted, and an intelligent online detection scheme for missing punching was further established. Through analysis of the vibration signal in this project, it can be judged that in the time domain, the average value and effective value of the missing punching signal were lower than those of the normal punching signal, and the number of peaks with obvious impulse peaks was less, in the frequency domain, the maximum frequency amplitude, the average frequency amplitude and the energy of the missing punching signal were lower than those of the normal punching signal, but the coefficient of variation was higher than that of the normal punching signal. According to the experimental results, this work proposes an intelligent missing punching detection scheme, which separates the missing punching signal and the normal punching signal by prejudging, processing, feature extraction, detection and judgment on the collected signals.
automobile carling; missing hole; intelligent detection; vibration signal
10.3969/j.issn.1674-6457.2022.07.004
TG38
A
1674-6457(2022)07-0028-08
2022–04–29
黃中生(1997—),男,碩士生,主要研究方向為先進材料成形技術及裝備。
李靖祥(1984—),男,博士,副教授,博士生導師,主要研究方向為先進材料成形技術及裝備、復雜機電系統設計與控制。
責任編輯:蔣紅晨
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
海峽科技與產業(2016年3期)2016-05-17 04:32:12
