一種可重構視覺防錯支架的設計與研究
2022-07-24 09:27:56廖益豐唐小鳳陳桂平
裝備制造技術
2022年4期
關鍵詞:支架
廖益豐,唐小鳳,陳桂平
(柳州鐵道職業技術學院,廣西 柳州545616)
0 引言
發動機是汽車的主要零部件,為了滿足多品種小批量的生產方式,越來越多的廠商將自己傳統的發動機裝配線改造為柔性裝配線[1]。柔性裝配線需要在同一條裝配線上裝配多種不同型號的產品,為防止裝配錯誤,工作人員需要對每種產品進行打碼標記以便區分。目前多數機械制造業都采用針式打刻技術[2]進行打碼,針式打刻機在更換型號時有可能會出現打碼不夠精確的現象,若檢測不出來會使產品批量打碼錯誤,造成巨大損失。為了較好地解決上述問題,盡可能規避各種缺陷和錯誤的產生,生產過程中的校驗、測量和零部件識別技術受到越來越多的重視[3]。吉林大學對基于機器視覺的開關總成防錯漏裝系統進行了研發,該系統包括半自動引導模塊及機器視覺檢測模塊[4];上海交通大學研究了汽車門內板總成焊接防錯技術并設計基于光電傳感器的門內板防錯系統[5]。盡管視覺防錯系統的研究已有了一定的熱度,但能夠通過構件重組來改變自身剛度和穩定性的視覺防錯相機支架還研究較少。
設計適應性強且能通過構件重組的方式改變自身剛度和穩定性的視覺防錯相機支架,其具有良好的應用前景。
1 視覺防錯支架結構設計
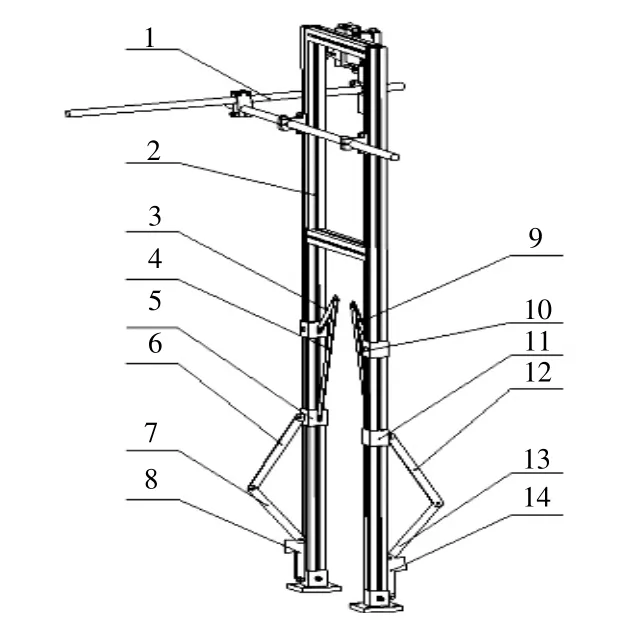
圖1 視覺防錯支架
相機調位組件安裝在支架主體上,用于夾持相機并調節相機位置。第一連桿與支架主體轉動副連……
登錄APP查看全文
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
海洋信息技術與應用(2020年3期)2020-08-24 07:25:10
中國臨床醫學影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業自動化(2017年2期)2017-03-20 14:26:14
中國繼續醫學教育(2015年6期)2016-01-07 07:38:49
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
