基于射波刀Xsight spine prone tracking模式治療脊柱腫瘤患者的擺位準確性分析*
2022-07-23 07:26:38李君孔祥慧楊瑞杰程程王工莊洪卿
中國腫瘤臨床 2022年13期
李君 孔祥慧 楊瑞杰 程程 王工 莊洪卿
立體定向放射治療(stereotactic radiation therapy,SRT)技術具有增加腫瘤劑量并減少正常組織照射的能力,從而獲得更高的腫瘤控制率和更低的正常組織并發癥[1-3]。射波刀作為SRT的專用設備,在現代放療中越來越多地應用于脊柱腫瘤的治療[4-6]。射波刀治療脊柱腫瘤患者,常規采用仰臥位擺位方式。由于射波刀治療時間較長,部分術后患者因疼痛無法長時間保持仰臥位姿勢治療,致使俯臥位治療模式成為一種必要選擇方式。射波刀第五代機型(VSI)提供兩種脊柱追蹤治療模式,分別是脊柱追蹤系統(Xsight spine tracking,XST)與 俯臥位脊柱追蹤系統(Xsight spine prone tracking,XSPT)。XSPT是以脊柱為驗證標記物的同步呼吸追蹤系統,該系統能夠實時追蹤腫瘤在不同時間點和不同呼吸時相下的運動軌跡,通過控制機械手臂跟隨腫瘤運動而出束,實現精準放療。但是目前已有的研究鮮見射波刀XSPT模式治療脊柱腫瘤患者的準確性的相關報道。由于俯臥位治療方式不僅會降低擺位穩定性,還會因呼吸動度的影響,加劇靶區追蹤的不確定性[7-8]。因此是否能夠采用俯臥位進行脊柱腫瘤治療需要進行深入探討。本研究通過對比治療中仰臥位和俯臥位靶區位移的差異,評估射波刀俯臥位治療脊柱腫瘤患者的可行性。
1 材料與方法
1.1 臨床資料
選取2020年7月至2021年6月在北京大學第三醫院行射波刀治療的脊柱腫瘤患者18例,主要入組標準是仰臥與俯臥治療位均能滿足的腰骶腫瘤患者(表1)。所有患者均知情同意,并經過本院倫理委員會批準同意。
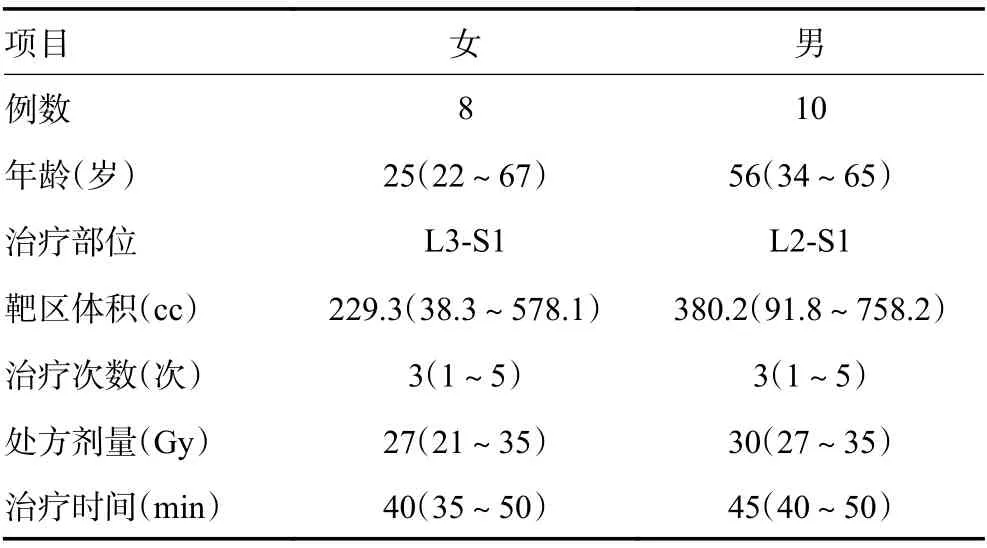
表1 脊柱腫瘤患者臨床資料
1.2 方法
1.2.1 CT模擬定位 患者進行2次定位,分別采用仰臥位與俯臥位。仰臥位定位:采用射波刀治療專用真空墊,患者平躺于真空墊的中間,雙手平放于身體兩側,掌心向內,對其進行塑形固定,雙腳置于足踏。俯臥位定位:采用專用的俯臥板和熱塑網固定,該俯臥板為中央空心型板,以減小患者俯臥時呼吸動度的影響。患者俯臥位治療擺位見圖1。

圖1 俯臥位脊柱腫瘤患者治療擺位方式及設備
兩種體位均采用16排螺旋大孔徑CT(Philips Brilliance Big Bore)模擬定位機掃描。掃描層厚 1.5 mm,管電壓 120 Kv,管電流 300 mAs。掃描范圍為靶區上下界15 cm。
1.2.2 XST與XSPT系統 治療計劃按照不同體位分別設計。仰臥位采用XSP治療模式,仰臥位采用XSPT治療模式。
XST系統工作原理是將治療過程中采集的脊椎感興趣區域(region of interest,ROI)的實時X線影像與模擬定位CT的數字重建放射影像(digital reconstructed radiograph,DRR)進行配準,以確定靶區的位置獲得擺位誤差。通過自動調整機械臂的位置,利用擺位誤差數據將入射射束重新定向照射于靶區的當前位置。對于仰臥位治療,XST系統已被證明可實現<1 mm的臨床治療精確度。
XSPT系統工作原理是通過追蹤患者體表紅外信號捕捉呼吸動度,并與實時X影像監測的脊柱ROI運動軌跡構建呼吸模型,預測靶區運動軌跡。治療中通過機械手臂的移動跟隨靶區進行精準照射,從而實現呼吸運動的補償。XSPT系統運行模式類似于射波刀同步呼吸追蹤系統。只是同步呼吸追蹤系統是基于金標監測靶區的位置,而XSPT系統是基于脊柱的ROI。呼吸模型預測的準確性主要由系統計算的相關誤差決定,當相關誤差>2.5 mm時,治療系統會自動終止出束,降低治療風險。
1.2.3 數據采集 患者治療分次數為1次,采用俯臥位模式實施放射治療,治療結束后采用模擬計劃進行仰臥位數據采集。患者治療分次數>1分次,兩種體位的計劃交替實施進行放射治療。治療期間,以90~150 s時間間隔采集仰臥位與俯臥位的六維擺位修正誤差。平移修正誤差為左右方向(left-right,L-R)、進出方向(inferior-superior,I-S)與升降方向(anteriorposterior,A-P)。角度修正誤差為順時針-逆時針旋轉角度(clockwise-anticlockwise,CW-Ccw)、仰俯角度(head up-head down,Hu-d)與傾斜角度(roll left-roll right,Rl-r)。患者俯臥位治療中,需記錄I-S、L-R和A-P共3個方向的呼吸模型相關誤差。
1.3 統計學分析
采用SPSS 26.0統計學軟件進行處理與分析數據,所有數據以±s表示。仰臥位與俯臥位的擺位誤差的比較,釆用獨立樣本t檢驗分析方法。檢驗水平α=0.05,以P<0.05為差異具有統計學意義。
2 結果
如表2所示,仰臥位平移方向L-R、I-S和A-P修正誤差分別為(0.36±0.28) mm、(0.27±0.24)mm和(0.18±0.16) mm,俯臥位分別為(0.36±0.32) mm、(0.50±0.40) mm和(0.31±0.26) mm。相比于仰臥位,俯臥位在進出與升降方向的修正誤差較大,差異具有統計學意義(P<0.05)。對于角度修正,仰臥位CWCcw、Rl-r和Hu-d修正值分別為(0.62±0.34)°、(0.30±0.26)°和(0.32±0.23)°,俯臥位分別為(0.58±0.36)°、(0.33±0.27)°和(0.39±0.42)°。兩種擺位方式在治療中,3個方向的角度偏移不顯著,差異無統計學意義(P>0.05)。
表2 仰俯位和俯臥位擺位誤差比較 ( ±s )
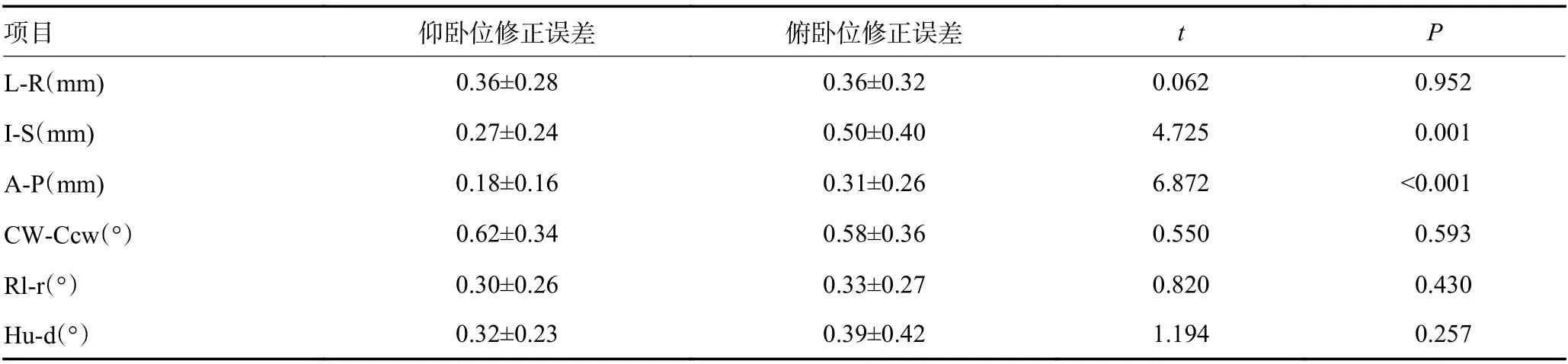
表2 仰俯位和俯臥位擺位誤差比較 ( ±s )
L-R:左右方向;I-S:進出方向;A-P:升降方向;CW-Ccw:順時針-逆時針旋轉角度;Rl-r:傾斜角度;Hu-d:仰俯角度
項目 仰臥位修正誤差 俯臥位修正誤差 t P L-R(mm) 0.36±0.28 0.36±0.32 0.062 0.952 I-S(mm) 0.27±0.24 0.50±0.40 4.725 0.001 A-P(mm) 0.18±0.16 0.31±0.26 6.872 <0.001 CW-Ccw(°) 0.62±0.34 0.58±0.36 0.550 0.593 Rl-r(°) 0.30±0.26 0.33±0.27 0.820 0.430 Hu-d(°) 0.32±0.23 0.39±0.42 1.194 0.257
箱線圖顯示俯臥位A-P方向與I-S方向的偏移量相比于仰臥位較高(圖2),并且離群值較仰臥位偏多。但是對于角度修正誤差,兩種體位的差別并不顯著。
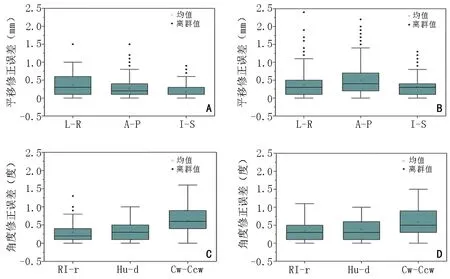
圖2 仰臥位與俯臥位修正誤差箱線圖
對于俯臥位,XSPT系統的呼吸模型在L-R、I-S和A-P共3個方向的相關誤差均值分別為(0.21±0.11)mm、(0.41±0.38)mm和(0.68±0.42)mm。總相關誤差均值為(0.82±0.57) mm,最大值為1.32 mm,見表3。
表3 俯臥位XSPT呼吸模型相關誤差 ( ±s )
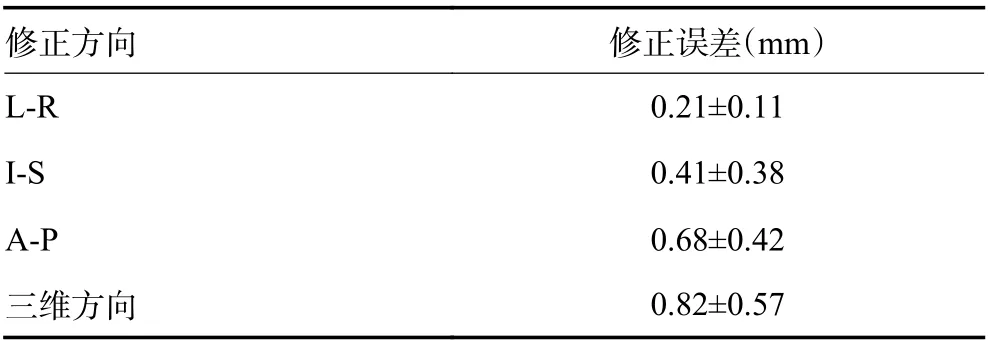
表3 俯臥位XSPT呼吸模型相關誤差 ( ±s )
L-R:左右方向;I-S:進出方向;A-P:升降方向
修正方向 修正誤差(mm)L-R 0.21±0.11 I-S 0.41±0.38 A-P 0.68±0.42三維方向 0.82±0.57
3 討論
射波刀通過非共面非等中心照射,能夠實現靶區外劑量的快速跌落[9-10]。相比于常規加速器,射波刀對脊髓的保護具有絕對優勢[11-12]。由于射波刀配置的特殊性,機頭相對較大。為了防止機頭觸碰地面,沿治療床平面向下26°的范圍內無射束路徑,致使從側后方無法實施照射[13]。由于射波刀治療時間較長,為保證治療過程中患者體位的穩定,常規采用仰臥位治療模式。該體位的治療射束將會穿過更長的路徑才能達到靶區,致使靶區前方的正常組織接受較多的劑量。為了改善射波刀在脊柱腫瘤放療中劑量分布的局限,很多研究采用XST計劃方案評估俯臥位治療模式下的擺位誤差與劑量分布[13-14]。結果表明由于呼吸運動的影響,導致靶區追蹤精度降低與正常組織受照劑量升高,使俯臥位脊柱腫瘤治療方式沒有明顯優勢。因此,對于射波刀脊柱腫瘤俯臥位的治療模式,實現靶區動態追蹤,呼吸運動補償成為精準放療的關鍵。
隨著技術的優化與完善,射波刀 XSPT系統是追蹤脊柱的同步呼吸追蹤方式,具有實時追蹤運動靶區的能力。本研究將XSPT俯臥位方法與XST仰臥位方法對脊柱腫瘤患者擺位修正誤差進行了比較。結果顯示俯臥位在A-P方向和I-S方向上的位移偏差比仰臥位顯著增高。盡管在治療中脊柱ROI的追蹤區域在同一椎體上,但在治療過程中觀察到兩種體位的運動模式和范圍不同。表明腰骶脊柱在前后、升降方向上的位移偏差并不是嚴格的隨機誤差,而是由呼吸引起腹部運動產生的位移。對于俯臥位,呼吸運動會增加靶區追蹤的不確定性。有研究表明,在不使用同步呼吸追蹤的條件下,靶區追蹤誤差最大可達9.1 mm[15]。因此,對于靜態追蹤的XST系統,并不適合仰臥位治療模式。而XSPT系統將脊柱運動軌跡與呼吸建立相關關系構建呼吸預測模型,能夠實現動態靶區的追蹤。本研究18例患者呼吸模型平均相關誤差<1 mm,總相關誤差最大值<1.5 mm,說明XSPT系統在實時動態追蹤靶區過程中能夠實現精準打靶。
此外,本研究中發現患者體位固定的方式也是影響患者擺位穩定性與重復性的關鍵因素。擺位修正誤差的結果表明,相比于仰臥位,雖然俯臥位受呼吸運動的影響在I-S與A-P平移方向存在較大的位移偏差,但角度修正誤差無顯著性差異。俯臥位患者均采用加長熱塑體網進行固定。相比于仰臥位固定的真SG空墊,熱塑網與體表的貼合度更高,對患者身體旋轉的限制更好,擺位重復性和穩定性也會更優[16-17]。因此,XSPT系統與俯臥板體網固定模式能夠滿足臨床對于脊柱腫瘤立體定向放療的要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34