直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)智能輔助決策系統(tǒng)發(fā)展分析
2022-07-19 03:40:22王曉衛(wèi)來國軍郭永昌
無人機(jī) 2022年6期
王曉衛(wèi),來國軍,郭永昌
陸軍航空兵學(xué)院
在未來相當(dāng)長一段時(shí)間內(nèi),直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)仍然是主要作戰(zhàn)模式之一。美軍對直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)的概念、關(guān)鍵技術(shù)、裝備、驗(yàn)證試驗(yàn)等方面進(jìn)行了一系列研究,有效推進(jìn)了直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)的實(shí)戰(zhàn)化應(yīng)用。本文總結(jié)美軍直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)智能輔助決策系統(tǒng)的組成和關(guān)鍵技術(shù),以期為國內(nèi)從事直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)研究的單位提供參考。
在軍事對抗中,直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)能大幅提高直升機(jī)的戰(zhàn)場生存力。當(dāng)前,美軍“阿帕奇”軍用直升機(jī)已經(jīng)完成批改升級(jí),并具備“1控4”第IV級(jí)有人機(jī)/無人機(jī)協(xié)同等級(jí)。
在不確定、非完全信息、開放的直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)環(huán)境中,直升機(jī)飛行員要在較短的時(shí)間內(nèi)從大量信息中獲取有用信息,形成正確認(rèn)知并迅速做出決策,單純依靠人員指揮決策顯然不能滿足作戰(zhàn)需求。軍方迫切須要一種新的技術(shù)來輔助飛行員決策,以提升指揮速度。如何構(gòu)建一種高動(dòng)態(tài)、極其復(fù)雜、強(qiáng)對抗、不確定戰(zhàn)場環(huán)境下快速、準(zhǔn)確和有效的智能輔助決策系統(tǒng),是未來軍事領(lǐng)域研究的一個(gè)熱點(diǎn)課題。
為增強(qiáng)空中或地面指揮能力,美國陸軍航空發(fā)展局一直致力于態(tài)勢感知和輔助決策技術(shù)開發(fā)。當(dāng)美國陸航應(yīng)用技術(shù)理事會(huì)(AATD)發(fā)起“空中有人系統(tǒng)/無人系統(tǒng)技術(shù)”(AMUST)項(xiàng)目和“獵人遠(yuǎn)程殺傷編隊(duì)”(HSKT)項(xiàng)目后,美國陸軍航空發(fā)展局參與其中,對直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)的關(guān)鍵技術(shù)進(jìn)行開發(fā)、驗(yàn)證和部署。在協(xié)同作戰(zhàn)試驗(yàn)中,“黑鷹”直升機(jī)安裝了機(jī)動(dòng)指揮官助手(MCA),“阿帕奇”直升機(jī)集成了作戰(zhàn)人員助理系統(tǒng)(WA),最終,不同機(jī)載傳感器數(shù)據(jù)和戰(zhàn)場情報(bào)數(shù)據(jù)實(shí)現(xiàn)了共享和融合,形成連續(xù)的通用相關(guān)作戰(zhàn)影像(CROP),直升機(jī)飛行員和機(jī)動(dòng)指揮官利用通用相關(guān)作戰(zhàn)影像,完成了作戰(zhàn)任務(wù)。
作戰(zhàn)人員助理系統(tǒng)的組成、功能與關(guān)鍵技術(shù)
作戰(zhàn)人員助理系統(tǒng)是波音公司鬼怪工廠根據(jù)“空中有人系統(tǒng)/無人系統(tǒng)技術(shù)”項(xiàng)目和“獵人遠(yuǎn)程殺傷編隊(duì)”項(xiàng)目需求開發(fā)的輔助決策系統(tǒng),可直接幫助“阿帕奇”直升機(jī)飛行員制訂和選擇行動(dòng)方案,提高飛行員的態(tài)勢感知能力和輔助決策能力,飛行員因此可同時(shí)有效管理直升機(jī)和無人機(jī),并集中精力處理重要的任務(wù),如交戰(zhàn)規(guī)劃和戰(zhàn)術(shù)機(jī)動(dòng)等。
組成與功能
作戰(zhàn)人員助理系統(tǒng)由無人機(jī)航線規(guī)劃、航線評(píng)估、火力攻擊、數(shù)據(jù)融合、無人機(jī)機(jī)載傳感器控制、飛行控制、無人機(jī)機(jī)載視頻記錄和圖像接收等模塊組成。各模塊的功能如下所述。
1.航線規(guī)劃模塊的功能
基于任務(wù)目的、約束條件、已知威脅、地形、時(shí)間和位置等條件,航線規(guī)劃模塊自動(dòng)規(guī)劃無人機(jī)航線。
2.航線評(píng)估模塊的功能
該模塊計(jì)算、識(shí)別并顯示所規(guī)劃的航線和已知威脅源的風(fēng)險(xiǎn),對當(dāng)前航線面臨的風(fēng)險(xiǎn)進(jìn)行評(píng)估,使用不同的顏色標(biāo)注航線風(fēng)險(xiǎn)等級(jí)。黃色表示來自傳感器探測的威脅,紅色則表示航線可能在武器攻擊范圍內(nèi)。
3.火力攻擊模塊的功能
根據(jù)航線、距離、位置、機(jī)動(dòng)區(qū)域、火力范圍等因素,火力攻擊模塊計(jì)算出直升機(jī)飛行員完成目標(biāo)偵察和武器發(fā)射所須要的最佳位置。
4.數(shù)據(jù)融合模塊的功能
該模塊具備多源異構(gòu)數(shù)據(jù)融合功能,能夠?qū)⒅鄙龣C(jī)火控雷達(dá)(FCR)、機(jī)載電路、數(shù)據(jù)鏈、光電/紅外吊艙、無人機(jī)等系統(tǒng)采集的信息進(jìn)行融合。
5.無人機(jī)機(jī)載傳感器控制模塊的功能
傳感器控制模塊具有機(jī)載傳感器掃描范圍設(shè)定、通視位置計(jì)算及顯示功能。
6.飛行控制模塊的功能
該模塊具有第IV級(jí)有人機(jī)/無人機(jī)協(xié)同等級(jí),可直接獲取無人機(jī)收集的影像和其他數(shù)據(jù),并對無人機(jī)飛行和任務(wù)載荷進(jìn)行控制。

圖1 AH-64D“阿帕奇”直升機(jī)安裝的作戰(zhàn)人員助理系統(tǒng)界面。

圖2 作戰(zhàn)人員助理系統(tǒng)顯示的無人機(jī)飛行控制界面。
7.無人機(jī)機(jī)載視頻記錄和圖像接收模塊的功能
該模塊具有記錄無人機(jī)視頻的功能。通過該模塊,無人機(jī)與指揮直升機(jī)安裝的陸軍機(jī)載指揮和控制系統(tǒng)(A2C2X)之間實(shí)現(xiàn)了視頻、數(shù)據(jù)接收與發(fā)送。
關(guān)鍵技術(shù)
為使直升機(jī)更好地規(guī)劃航線并具備規(guī)避威脅的能力,作戰(zhàn)人員助理系統(tǒng)須使用基于火控雷達(dá)的目標(biāo)跟蹤、多源傳感器數(shù)據(jù)融合和假目標(biāo)剔除等核心技術(shù)對戰(zhàn)場態(tài)勢和威脅進(jìn)行評(píng)估。
1.火控雷達(dá)目標(biāo)跟蹤技術(shù)
在沒有數(shù)據(jù)融合的情況下,直升機(jī)機(jī)載火控雷達(dá)掃描目標(biāo)時(shí),上一幀掃描探測到的所有目標(biāo)都會(huì)從顯示信息中被刪除,由新的掃描結(jié)果取代。然而,操控員很難確定新掃描目標(biāo)與上一幀掃描目標(biāo)之間的一一對應(yīng)關(guān)系。基于相關(guān)匹配的火控雷達(dá)目標(biāo)跟蹤算法能較好地解決這一問題,有效提高戰(zhàn)場影像的穩(wěn)定性、準(zhǔn)確性和完整性。對于第一次掃描的目標(biāo),火控雷達(dá)使用序號(hào)標(biāo)注該目標(biāo)的軌跡;對于第一次掃描之后的目標(biāo),算法對新掃描目標(biāo)和上一幀掃描目標(biāo)間的相關(guān)性進(jìn)行檢測,并對關(guān)聯(lián)目標(biāo)的軌跡進(jìn)行更新,以確保關(guān)聯(lián)目標(biāo)的軌跡保持連續(xù)性,后續(xù)未被掃描和強(qiáng)化的目標(biāo)不會(huì)隨著新的掃描立即消失。作戰(zhàn)人員助理系統(tǒng)使用一種基于時(shí)間的方案來最終消除那些沒有得到強(qiáng)化的目標(biāo)軌跡。
2.多源傳感器數(shù)據(jù)融合技術(shù)
在協(xié)同作戰(zhàn)中,目標(biāo)數(shù)量是飛行員重點(diǎn)關(guān)注的態(tài)勢感知信息之一。如果火控雷達(dá)獲取的目標(biāo)數(shù)據(jù)不進(jìn)行融合,當(dāng)火控雷達(dá)掃描的目標(biāo)也被其他傳感器(例如光電/紅外吊艙)探測時(shí),戰(zhàn)術(shù)態(tài)勢圖將顯示兩個(gè)符號(hào)對應(yīng)同一個(gè)目標(biāo),從而影響飛行員對戰(zhàn)場態(tài)勢的判斷。數(shù)據(jù)融合技術(shù)將不同傳感器獲取的目標(biāo)數(shù)據(jù)進(jìn)行軌跡關(guān)聯(lián),讓飛行員準(zhǔn)確識(shí)別多傳感器探測的目標(biāo),為飛行員準(zhǔn)確感知戰(zhàn)場目標(biāo)數(shù)量等要素提供支撐。
3.假目標(biāo)剔除技術(shù)
假目標(biāo)剔除技術(shù)根據(jù)相關(guān)跟蹤信息,進(jìn)一步提高跟蹤信息的精度并減少戰(zhàn)術(shù)影像中的雜波。當(dāng)一個(gè)目標(biāo)被火控雷達(dá)掃描后,后續(xù)這個(gè)目標(biāo)沒有被掃描且增強(qiáng),其軌跡將衰減或“老化”。經(jīng)過一段時(shí)間后,戰(zhàn)術(shù)態(tài)勢圖中的這個(gè)目標(biāo)將被刪除。
機(jī)動(dòng)指揮官助手的組成、功能與關(guān)鍵技術(shù)
指揮官利用機(jī)動(dòng)指揮官助手控制有人機(jī)/無人機(jī)編隊(duì)協(xié)同作戰(zhàn)。圖3顯示,“黑鷹”直升機(jī)通過改進(jìn)型數(shù)據(jù)調(diào)制解調(diào)器(IDM)和戰(zhàn)術(shù)通用數(shù)據(jù)鏈(TDCL),實(shí)時(shí)獲取“阿帕奇”直升機(jī)和“獵人”無人機(jī)傳輸?shù)男畔ⅰC(jī)動(dòng)指揮官助手共享和融合所有傳感器獲取的情報(bào)數(shù)據(jù),增強(qiáng)了指揮官的態(tài)勢感知能力,實(shí)現(xiàn)了直升機(jī)與無人機(jī)之間的協(xié)同控制。

圖3 美軍“空中有人系統(tǒng)/無人系統(tǒng)技術(shù)”項(xiàng)目和“獵人遠(yuǎn)程殺傷編隊(duì)”展示的協(xié)同作戰(zhàn)場景。
美國陸軍機(jī)載指揮與控制系統(tǒng)安裝機(jī)動(dòng)指揮官助手后,稱為改進(jìn)型機(jī)載指揮與控制系統(tǒng),其外形詳見圖4。

圖4 改進(jìn)型機(jī)載指揮與控制系統(tǒng)示意圖。
機(jī)動(dòng)指揮官助手的組成與功能
機(jī)動(dòng)指揮官助手由處理器、戰(zhàn)術(shù)通用數(shù)據(jù)鏈、Link 16數(shù)據(jù)鏈、機(jī)載視頻記錄儀和圖像收發(fā)機(jī)/單通道地面和機(jī)載系統(tǒng)(AVRIT/SINCGARS)、改進(jìn)型數(shù)據(jù)調(diào)制解調(diào)器/單通道地面和機(jī)載系統(tǒng)(IDM/SINCGARS)組成,包括輔助決策、分布式數(shù)據(jù)融合和基于智能體的數(shù)據(jù)發(fā)現(xiàn)(ABDD)等模塊。各模塊的功能如表1所述。
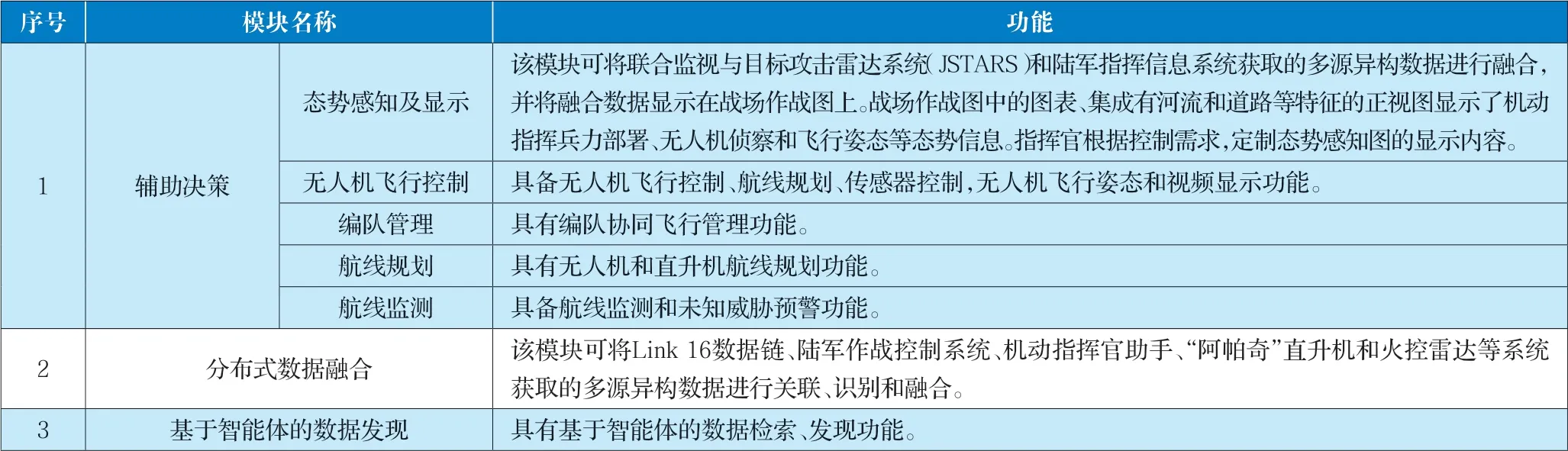
表1 機(jī)動(dòng)指揮官助手的模塊及其功能。
“黑鷹”直升機(jī)安裝的改進(jìn)型機(jī)載指揮與控制系統(tǒng)顯示的綜合態(tài)勢感知畫面詳見圖5。該態(tài)勢感知畫面顯示了任務(wù)、編隊(duì)、航線、目標(biāo)、設(shè)備等信息。其中,“黑鷹”直升機(jī)利用Link 16數(shù)據(jù)鏈將目標(biāo)請求信息傳輸給F/A-18“超級(jí)大黃蜂”戰(zhàn)斗機(jī);直升機(jī)和無人機(jī)通過戰(zhàn)術(shù)通用數(shù)據(jù)鏈傳輸位置、傳感器控制和飛行控制等信息;“黑鷹”和“阿帕奇”直升機(jī)使用改進(jìn)型數(shù)據(jù)調(diào)制解調(diào)器傳輸航線和目標(biāo)等信息。
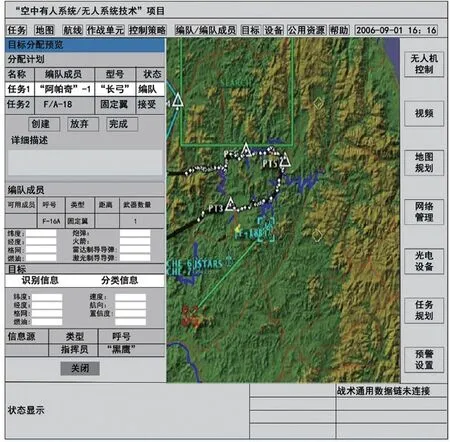
圖5 改進(jìn)型機(jī)載指揮與控制系統(tǒng)顯示的綜合態(tài)勢感知畫面。
關(guān)鍵技術(shù)
作為機(jī)動(dòng)指揮官的輔助決策系統(tǒng),機(jī)動(dòng)指揮官助手須要處理多個(gè)信息源中的2000多個(gè)目標(biāo)數(shù)據(jù),涉及基于移動(dòng)智能體的數(shù)據(jù)挖掘、多源傳感器數(shù)據(jù)融合、葡萄藤數(shù)據(jù)分發(fā)等核心技術(shù)。
1.基于移動(dòng)智能體的數(shù)據(jù)挖掘技術(shù)
自1995年以來,洛克希德-馬丁公司先進(jìn)技術(shù)實(shí)驗(yàn)室一直致力于基于移動(dòng)智能體的數(shù)據(jù)挖掘技術(shù)開發(fā),為數(shù)字化戰(zhàn)場信息傳輸、更新和監(jiān)控提供支持。智能體是一種軟件架構(gòu),能與環(huán)境交互并代表用戶執(zhí)行任務(wù)。智能意味著智能體具有感知、認(rèn)知環(huán)境或主題領(lǐng)域的能力,對變化的環(huán)境及時(shí)做出決策。移動(dòng)則表示智能體能在網(wǎng)絡(luò)節(jié)點(diǎn)之間移動(dòng),從而利用本地檢索不到的資源。
2.多源傳感器數(shù)據(jù)融合技術(shù)
多源傳感器數(shù)據(jù)融合技術(shù)能實(shí)時(shí)融合本機(jī)和它機(jī)提供的多源傳感器信息,形成統(tǒng)一的戰(zhàn)場態(tài)勢感知影像。機(jī)動(dòng)指揮官助手中的信息融合系統(tǒng)使用融合調(diào)度和融合控制模塊來滿足數(shù)據(jù)實(shí)時(shí)輸入和處理的要求。其中,融合調(diào)度模塊對待處理數(shù)據(jù)進(jìn)行評(píng)估,確定應(yīng)使用哪種算法來融合數(shù)據(jù),并選用適當(dāng)?shù)膬?nèi)核來處理數(shù)據(jù);融合控制模塊對融合算法的性能以及資源使用情況進(jìn)行監(jiān)視,當(dāng)內(nèi)存或CPU等資源使用在某一融合進(jìn)程中超過限制時(shí),該模塊適時(shí)啟動(dòng)優(yōu)先級(jí)或輸入數(shù)據(jù)下采樣等應(yīng)用控制策略。融合調(diào)度、融合控制、融合算法模塊化開發(fā)和配置這一頂層控制策略,使智能輔助決策系統(tǒng)有效擺脫了對硬件性能的依賴。
3.葡萄藤數(shù)據(jù)分發(fā)技術(shù)
葡萄藤架構(gòu)最初由洛克希德-馬丁公司開發(fā),它根據(jù)每個(gè)節(jié)點(diǎn)的信息需求,實(shí)現(xiàn)最大限度帶寬條件下的信息共享,這樣每個(gè)節(jié)點(diǎn)就可以只傳輸對下一節(jié)點(diǎn)有實(shí)際價(jià)值的信息。傳感器數(shù)據(jù)實(shí)時(shí)共享為每個(gè)參與者構(gòu)建了一個(gè)完整的通用影像。美國國防預(yù)研局(DARPA)小型單元操作項(xiàng)目采用了該架構(gòu)。
作戰(zhàn)人員助理系統(tǒng)和機(jī)動(dòng)指揮官助手的異同點(diǎn)
美軍作戰(zhàn)人員助理系統(tǒng)和機(jī)動(dòng)指揮官助手均安裝有無人機(jī)飛行控制、分布式數(shù)據(jù)融合和輔助決策軟件。但是,兩者協(xié)同層級(jí)和使用對象不同,其異同點(diǎn)如下所述。
首先,作戰(zhàn)人員助理系統(tǒng)主要供攻擊直升機(jī)飛行員使用,輔助低空高速飛行直升機(jī)中的飛行員與無人機(jī)協(xié)同作戰(zhàn),旨在最大程度降低飛行員的工作強(qiáng)度,提高直升機(jī)武器系統(tǒng)的智能化程度。盡管作戰(zhàn)人員助理系統(tǒng)和機(jī)動(dòng)指揮官助手都可實(shí)現(xiàn)第IV級(jí)有人機(jī)/無人機(jī)協(xié)同等級(jí),例如直升機(jī)直接接收無人機(jī)傳輸?shù)臄?shù)據(jù)和控制無人機(jī)飛行。但對于武器控制層面,攻擊直升機(jī)與無人機(jī)系統(tǒng)協(xié)同作戰(zhàn)時(shí),作戰(zhàn)人員助理系統(tǒng)可對無人機(jī)機(jī)載武器發(fā)射時(shí)間和戰(zhàn)位進(jìn)行規(guī)劃;而機(jī)動(dòng)指揮官助手屬于指揮層級(jí),須要使用數(shù)據(jù)鏈將火控雷達(dá)獲取的目標(biāo)信息發(fā)送至無人機(jī)。
第二,機(jī)動(dòng)指揮官助手主要供指揮直升機(jī)的機(jī)動(dòng)指揮官使用。在作戰(zhàn)人員助理系統(tǒng)的攻擊規(guī)劃、無人機(jī)飛行控制、傳感器控制、航線規(guī)劃等模塊基礎(chǔ)上,機(jī)動(dòng)指揮官助手增加了態(tài)勢感知信息顯示、無人機(jī)飛行控制、編隊(duì)管理、通信管理、交戰(zhàn)管理等模塊,以編隊(duì)管理代替無人機(jī)飛行控制,以交戰(zhàn)管理代替攻擊規(guī)劃。此外,指揮直升機(jī)上沒有機(jī)載光電/紅外吊艙等傳感器,因此機(jī)動(dòng)指揮官助手主要負(fù)責(zé)聯(lián)合監(jiān)視與目標(biāo)攻擊雷達(dá)系統(tǒng)、Link 16數(shù)據(jù)鏈和聯(lián)合公共數(shù)據(jù)庫(JCDB)等系統(tǒng)的數(shù)據(jù)融合。

第三,作戰(zhàn)人員助理系統(tǒng)和機(jī)動(dòng)指揮官助手的硬件平臺(tái)和操作系統(tǒng)存在較大差別。作戰(zhàn)人員助理系統(tǒng)采用的是Vxworks操作系統(tǒng),其處理環(huán)境不支持面向?qū)ο蟪绦蛑袠?biāo)準(zhǔn)內(nèi)存常規(guī)分配和釋放等操作;而機(jī)動(dòng)指揮官助手采用了Linux操作系統(tǒng)。盡管存在上述差異,二者共享同一個(gè)底層數(shù)據(jù)融合軟件。
總結(jié)
在未來戰(zhàn)場上,對抗態(tài)勢高度復(fù)雜且瞬息萬變,各種信息交匯,形成海量數(shù)據(jù),人腦難以快速、準(zhǔn)確地處理海量信息。直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)智能輔助決策系統(tǒng)采用多源傳感器信息融合等技術(shù),提升了直升機(jī)/無人機(jī)協(xié)同作戰(zhàn)能力,縮短了直升機(jī)/無人機(jī)協(xié)同預(yù)測、感知、認(rèn)知的時(shí)間,提高了決策效率,在較大程度上提升了直升機(jī)在瞬息萬變戰(zhàn)場上的作戰(zhàn)能力和生存力。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46