一種鐵路機車水冷系統管接頭密封結構及其優化
2022-07-18 06:08:08王智鵬許明夏李鶴群運飛宏趙鵬程
大連交通大學學報 2022年3期
王智鵬,許明夏,李鶴群,運飛宏,趙鵬程
(1.中車大連電力牽引研發中心有限公司,遼寧 大連 116052;2.動車組和機車牽引與控制國家重點實驗室,遼寧 大連 116052;3.哈爾濱工程大學 機電工程學院,黑龍江 哈爾濱 150001)
隨著鐵路及電力電子技術的不斷發展,車上電力設備也在向大容量、高密度、高集成化方向發展,水冷系統是交流傳動電力機車牽引變流器穩定工作的重要一環,對比風冷、油冷等冷卻方式,水冷散熱效果最佳,而且綠色節能,因此水冷系統被廣泛應用在鐵路機車上[1-2].金屬密封接頭相比傳統焊接接頭、螺紋密封接頭,有安裝快速可靠、密封性能好等優點,并可實現對已損壞的水冷系統管道進行快速修復,近年來逐步地開始運用于水冷系統中.
本文設計了一種水冷系統管接頭結構,明確了其密封原理,并利用仿真軟件建立了2D旋轉截面的仿真模型,提出三個與連接性能相關的目標變量與四個影響目標變量的設計變量,利用響應面模型與多目標遺傳算法對變量進行優化,有效地在保證密封性能的同時降低了安裝時的壓緊力,提高連接性能.
1 接頭結構及其工作原理
管接頭結構及裝配關系如圖1、圖2所示,采用公母頭式連接,由公頭、母頭和驅動環構成.驅動環外表面是一圓柱面,內表面是一錐面.公頭外表面是一錐面,與驅動環內表面配合,內表面有一道弧形密封環.接頭連接時,由連接工具在驅動環外端面提供軸向力,使驅動環產生軸向位移,并使公頭與驅動環配合一端產生徑向收縮,驅動環繼續軸向移動,公頭內表面的弧形密封環與母頭外表面接觸,并產生接觸應力.當接觸應力大于公母頭材料屈服極限時,接觸面產生塑性變形;當接觸應力是公母頭材料屈服極限2倍時[3],形成金屬密封.機械密封相比其他形式密封有以下優勢:①可靠性高,密封狀態穩定,泄漏量小;②使用壽命長,若水或油等介質在其中流動,這種密封形式能夠使用一至兩年;③可以應用的范圍非常廣,可以在低溫、高溫、低壓、高壓等極端環境下保持密封性能[4-5].

圖1 接頭的裝配關系
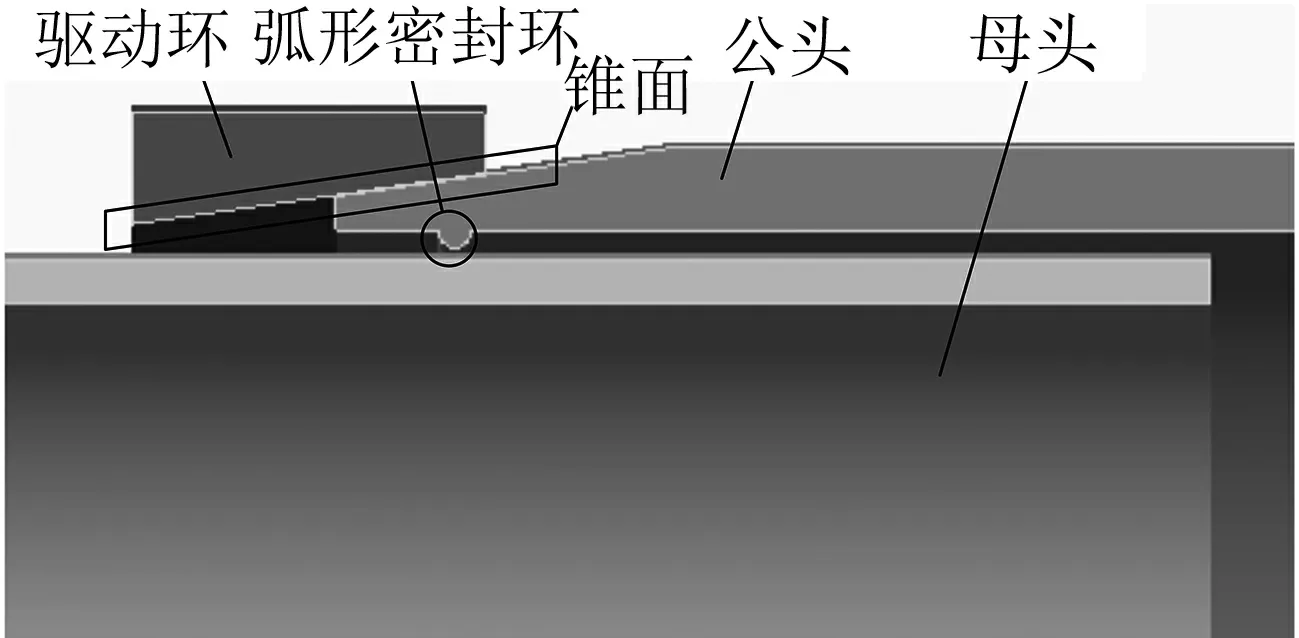
圖2 密封環局部放大圖
2 接頭仿真模型的建立
本文設計的接頭是公母頭以及驅動環的單側截面繞中心軸線旋轉一周得到的軸對稱結構.當驅動環加載時,整個接頭結構受力均勻,外加載荷約束及邊界條件也沿此中心軸線軸對稱,因此可采取2D軸對稱模型進行解算,從而減少模型單元個數,提高計算效率.之后直接進行靜力學以及結構參數的優化[6-8].
接頭所有組件的材料都選用鋼Q345,該材料的部分力學性能參數如下:ρ為7 850 kg/m3;E為2.1×106MPa;ν為0.3;σs為345 MPa.
圖3是接頭的仿真模型,密封環與母頭外表面之間以及驅動環錐面與公頭錐面之間的接觸設置為有摩擦.鋼材之間的摩擦系數取0.15[9],接觸面之間網格大小設置為0.2 mm,其余位置網格大小設置為0.8 mm.將接頭母頭深入公頭一端添加固定約束,公頭圓柱面端添加固定約束,對驅動環添加軸向位移6 mm.得到密封環的接觸應力,使驅動環有軸向位移的驅動力,以及公頭的結構應力.

圖3 接頭的有限元仿真模型
密封環位置的接觸應力能夠反映接頭的密封性能,連接完成時接觸應力σ大于690 MPa,則說明該接頭有良好的密封性能.驅動環的軸向力由液壓元件提供,而且液壓缸的推力F與徑向參數成正比,但是太大的尺寸會增大連接工具的結構負荷,所以在保證良好的密封性能的條件下這個軸向力要盡可能小.另外接頭公頭錐面端在連接過程中有大變形,所以還需使其結構應力σ′盡可能小.本文提出了4個影響以上3個目標變量的設計變量,分別是弧形密封環半徑r,錐面角度α,公頭一端到密封環的過渡距離l以及驅動環的軸向位移量s.
3 接頭參數靈敏度分析
靈敏度能夠評價每一個設計變量對連接性能的影響程度[10].
在分析接頭性能時,目標變量與設計變量的關系可以用式(1)表示:
gj=Gj(vi),(j=1,2,…,n)
(1)
其中:gj為第j個目標變量;vi為第i個設計變量.式(1)中每一個微小的vi的變化都會引起gj的變化,總結為式(2):
(2)
接頭密封面有限元平衡方程如下:
[P]n×1=[K]n×n[D]n×1
(3)
其中,[P]是壓力,[K]是剛度矩陣,[D]是位移.根據式(2)可得出接觸壓力對設計變量的靈敏度為:
(4)
給出各變量范圍0.65 mm≤r≤0.9 mm, 3.5 mm≤l≤5 mm, 6°≤α≤ 11°, 5 mm≤s≤7 mm.
靈敏度反映了設計變量的變化對目標函數變化的影響程度,本次優化的三個目標函數為接頭公頭的結構應力σ′、密封環的接觸應力σ以及能夠使驅動環產生軸向位移的載荷F.靈敏度若大于0,絕對值越大說明增加等量的目標變量所需增加的設計變量越小;當靈敏度小于0時,絕對值越大表明減小等量的設計變量可以帶來更大的目標變量的減少.目標函數σ′,σ以及F對各個設計變量的靈敏度如圖4~圖6所示.

圖4 σ′對各設計變量的靈敏度

圖5 σ對各設計變量的靈敏度

圖6 F對各設計變量的靈敏度
如圖4所示,設計變量對接頭公頭在連接過程中的結構應力σ′的靈敏度為正值的是密封環半徑r,接頭公頭錐面傾斜角度α和驅動環的軸向位移s,其中設計變量s與α對目標變量σ′的影響較大.設計變量對接頭公頭在連接過程中的結構應力σ′的靈敏度為負值的是接頭公頭端面到密封環的過渡距離l,其靈敏度絕對值小于0.1,所以對目標變量σ′的影響較小.
如圖5所示,設計變量對密封環接觸應力σ的靈敏度為正值的是密封環半徑r,接頭公頭錐面傾斜角度α和驅動環的軸向位移s,其中設計變量s與α對目標變量σ′的影響較大.設計變量對密封環接觸應力σ的靈敏度為負值的是接頭公頭端面到密封環的過渡距離l,其數值與r對σ的靈敏度數值相當,所以對目標變量σ有一定的影響.
如圖6所示,設計變量對驅動環在連接過程中的加載力F的靈敏度為正值的是密封環半徑r,接頭公頭錐面傾斜角度α和驅動環的軸向位移s,其中設計變量s與α對目標變量σ′的影響較大,密封環半徑r對其影響較小.設計變量對驅動環在連接過程中的加載力F的靈敏度為負值的是接頭公頭端面到密封環的過渡距離l,其靈敏度絕對值小于0.1,所以對目標變量σ′的影響較小.
綜上分析,即使設計變量l對目標變量F與σ′的靈敏度都很小,但對目標變量σ的靈敏度不可忽略,所以對以上四個設計變量全部進行優化.
響應面模型是Box G E P與Wilson K G[11]于1992年首次發現并提出的,該模型與優化設計密不可分,多次應用于實際工程中.2011年,Hu與Hou[12]改進了遺傳算法,即帕雷托解集通過過濾每次迭代后的非優質點,保證迭代之后的種群比上一代優質,保證了最優解的精確性.2015年李莉[13]等肯定了響應面法是一種集實驗設計與優化的方法,但也同時指出局限性,即實驗點選取不當會對優化結果造成一定的偏差.
通過響應面以及多目標遺傳算法(MOGA)對設計變量進行優化,由于設計變量l對所有目標函數的影響均很小,故對其不做詳細分析.如圖7所示,當密封環半徑r以及公頭錐面傾斜角α不變時,驅動環軸向位移量s越大,接頭公頭結構應力σ′越大,且變化量較大.當密封環半徑r以及驅動環軸向位移量s不變時,公頭錐面傾斜角α越大,接頭公頭結構應力σ′越大,變化量也相對大.圖8和圖9是密封面半徑r對目標變量σ′的影響,看出當設計變量s和α不變時,參數r變化時,對目標變量σ′的影響很小.

圖7 σ′與α,s的響應面

圖8 σ′與r,l的響應面

圖9 σ′與α,r的響應面
如圖10所示,目標變量σ隨變量r的變化趨勢是先減小,接著增大再減小.變量l的變化趨勢是當r較小時,隨著l的增大,目標變量σ先減小再增大,當r較大時,隨著l的增大,目標變量σ先增大再減小,其余位置σ基本隨l遞減.

圖10 σ與α,l的響應面
如圖11所示,設計變量α對目標變量σ的影響較大,設計變量r與目標變量σ總體成正相關,但在α在兩端取值的時候變化較大,在其他位置σ對r的變化量不大.目標變量σ與設計變量s成正相關,而且隨著設計變量α的增大,σ對s的變化量越來越大.

圖11 σ與α,s的響應面
圖12表明目標變量F分別于變量s和α成正相關,并且對變量α的變化量大,對變量s的變化量小,同時隨α的增大,F對s的變化量越來越大.以上對于響應面的分析結論與靈敏度直方圖對應,可以驗證通過靈敏度直方圖分析出的目標變量與設計變量之間的變化關系是正確的.

圖12 F與α,s的響應面
4 連接性能優化
利用Pareto遺傳算法對接頭連接性能進行多目標優化設計,可以保證在整個設計空間內隨機取值,各個目標變量沒有優先級先后之分,這樣得到的優化最優解比較合理.
如圖13所示為遺傳算法優選流程[14].

圖13 遺傳算法優選流程
基于接頭連接性能的多目標優化數學模型為:

(5)
假定函數與自變量之間的關系是f(x),那么利用徑向基函數法的近似關系就是f*(x).
(6)

那么接頭連接性能多目標優化近似求解目標變量與設計變量與約束條件的函數關系如下:
(7)
其中,D=[r,l,α,s]T,μ1,μ2,μ3是待定系數.
將n個設計點的目標變量值代入式(7)中,會有:
(8)
其中,
對式(8)進行逆運算,求出所有待定系數.
(9)
結合響應面與多目標遺傳算法,得到3個候選點,三組解如表2所示.

表2 三組候選點
該接頭優化前設計參數為r=0.8 mm,l=4.4 mm,α=7°,s=6.2 mm.優化結果選擇候選點1, 考慮到工程實際應用,各參數定為r=0.85 mm,l=4 mm,α=6.2°,s=6.2 mm.假設驅動環開始軸向移動到壓緊需要1 s,三個目標函數在驅動環壓入過程的變化如圖14~圖16所示.

圖14 密封環接觸應力優化前后對比

圖15 公頭最大結構應力優化前后對比

圖16 推動力優化前后對比
具體變化量如表3所示.

表3 優化前后目標函數具體變化量
由于優化之前公頭與母頭之間的接觸應力已經能夠滿足密封要求,說明設計變量初值選定較合理,優化后接觸應力數值也沒有大幅度增大,但是公頭結構應力與驅動環所需推動力都有大幅度減小,這個是我們特別希望看到的,降低驅動力可以減小提供驅動力的液壓系統的液壓缸與活塞桿的體積,使得連接工具更小,降低公頭結構應力可以延長其使用壽命.
5 優化后有限元分析
利用優化后確定的設計變量r,l以及α重新生成2D旋轉截面模型,添加各構件材料屬性與接觸方式,重新生成網格,在公頭中部與母頭端面添加固定約束,在驅動環端面重置縱向位移約束s=6.1 mm,對公頭內應力,密封面接觸應力以及驅動環推動力進行求解,得到如圖17~圖19所示的結果.

圖17 接頭連接后的應力分布

圖18 公頭應力分布

圖19 母頭外表面應力分布
由以上各部件應力分布圖可知,公頭由于受壓與驅動環并且擠壓母頭,最大結構應力出現在弧形密封環內部,如圖18所示,母頭外表面應力最大值處即是與公頭密封環擠壓所形成,最大值作為接觸應力,其數值大于2倍Q235的屈服強度,可以形成有效的密封.
6 結論
本文提出了一種基于金屬密封的鐵路水冷系統管道的接頭,通過公頭密封環與母頭接觸,擠壓,在兩接觸面產生塑性變形達到密封的效果.本研究為金屬機械密封第一次在鐵路電力機車牽引變流器水冷系統中提出,對水冷系統管道連接有重要意義.
建立了接頭的結構模型,提出影響其連接性能的三個目標變量σ,σ′和F與影響目標變量的四個設計變量r,l,α和s.通過響應面分析以及MOGA算法得到以上各設計變量的最優解,考慮到工程實際應用的要求,各設計變量數值精確到0.1,優化前后連接性能有很大提高.
(1)密封環接觸應力增大了1.52%,在能滿足密封性能的基礎上又將該性能提高;
(2)推動力減小了30.3%,可以使得連接工具盡可能小;
(3)公頭結構應力減小了33.1%,能提高接頭的使用壽命.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
