位置服務系統在煤礦中的應用
2022-07-14 03:10:40杜志剛
山東煤炭科技 2022年6期
杜志剛
(天地(常州)自動化股份有限公司,江蘇 常州 213000)
煤礦井下是一個特殊的作業空間,井下目標對象位置信息對于安全生產作業具有極其重要的作用。人員位置跟蹤為考勤管理提供了有效手段,同時可以保障災時救援行動的迅速有效;機車位置跟蹤可以提高運輸調度管理水平和生產效率;井下生產設備通過本身與移動目標的位置信息可以保障人機安全作業,設備間相互位置感知是實現協同作業直至實現礦井少人化、無人化智能開采的重要技術基礎。由于井下無法接收到GPS 信號,缺乏統一定位服務基礎設施支撐,因此,建立井下類似GPS 的位置服務系統勢在必行。
1 目前定位系統存在的問題
位置服務系統旨在提供目標對象精準的實時位置信息,是建立在定位基礎上的服務,井下定位系統的定位精度、定位速度、實時性直接決定位置服務系統建設的成敗。目前國內在用的定位系統主要存在以下幾個問題:(1)定位精度不高,定位數據實時性不足;(2)單體式定位系統不滿足位置服務系統所要求的開放服務架構;(3)定位系統數據庫承載能力不能滿足定位數據實時響應要求;(4)位置服務系統要求二維或三維定位才能滿足多目標不同場景的應用。
通過研究無線超寬帶定位[1-3]、數據優化算法[4]、高精度時鐘同步、地磁慣性導航、運動特征約束等關鍵技術方法,以開放服務體系為基礎架構,完成了位置服務系統的開發,為井下運動目標跟蹤、人機安全作業、無人駕駛等應用需求提供了高精度實時位置服務。
2 系統組成
位置服務系統主要由位置服務基礎設施、數據驅動模塊、位置服務管理控制中間件、位置服務接口及數據庫組成。其系統架構如圖1。
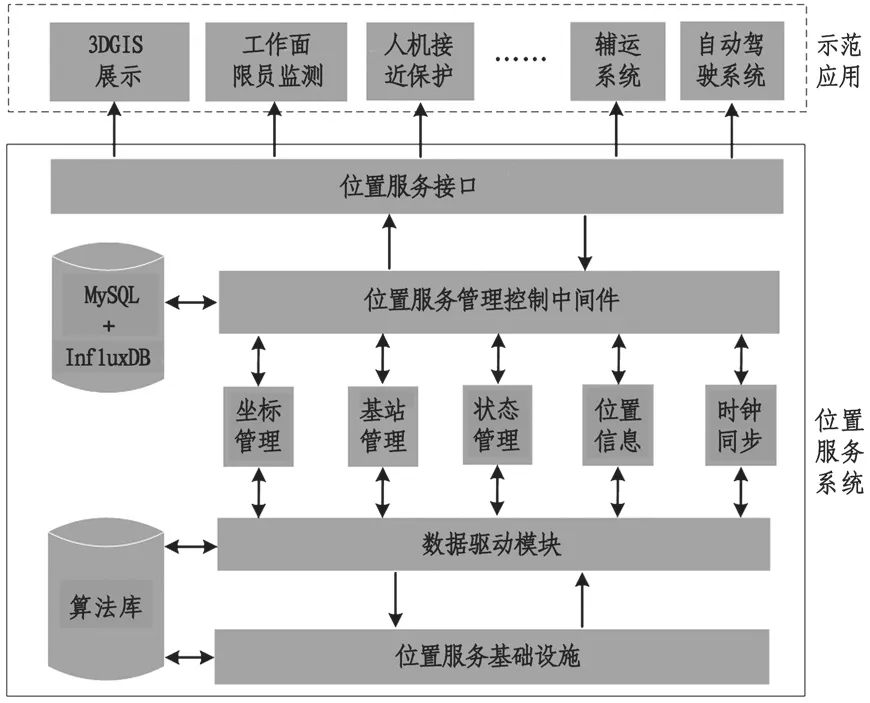
圖1 位置服務系統架構
位置服務基礎設施主要包括井下傳輸網絡、定位分站和定位標簽卡,用來定位和優化目標對象的位置信息;數據驅動模塊通過接入礦井有線環網和無線通信網絡完成定位數據的交換傳輸;位置服務管理控制中間件主要完成定位數據的管理、定位設施基礎信息維護等,同時負責管理和維護位置服務數據庫,數據存儲采用MySQL+InfluxDB 的混合存儲模式;位置服務接口提供分站位置信息查詢、目標對象實時位置信息查詢、目標軌跡查詢及控制命令接口,同時通過WebAPI 接口為各系統應用提供核心定位數據。
3 示范應用
位置服務示范應用主要包括3DGIS 三維系統展示、工作面限員監測、人機接近保護等,另外系統還為輔助運輸管控系統、車輛無人駕駛系統提供移動目標精確位置信息,保證系統的安全運行。系統于2021 年1 月在兗礦集團鮑店礦、陜煤曹家灘礦試運行,經過大量測試優化,系統已穩定運行數月,達到了預期效果。
3.1 3DGIS 三維系統展示
測試現場共安裝98 臺定位分站及接收器,實現了全部采煤工作面和主要行人大巷信號全覆蓋。三維展示軟件效果如圖2。

圖2 三維軟件展示
在軟件中可查看和管理全礦的井下三維地圖,首頁可以顯示帶班領導、區域重點人數、實時報警、井下人員柱狀圖和人員下井折線圖等。在三維GIS圖中可以實時展示井下所有人員的位置和走動情況,同步可以展示人員實時位置的列表,可以根據分站和接收器查詢人員分布列表;軌跡回放,可以回放人員歷史軌跡,根據人員歷史軌跡的坐標進行軌跡展示。
3.2 工作面限員監測
為提高煤礦安全保障能力,減少井下作業人數,從源頭減少群死群傷事故風險,根據國家相關部門規定,煤礦采掘工作面必須嚴格控制工作面作業人數。工作面限員控制系統采集通過位置服務系統提供的人員位置信息,實現限員功能。系統主界面如圖3。

圖3 工作面限員控制系統
在7304 工作面兩個順槽200 m 處各安裝了1套工作面限員設備,設備由1 臺本安型讀卡器(用于接收信號范圍內相關人員的定位數據信息)、1臺通信信號裝置主機(用于超員預報警信息播報)、限員信息顯示牌(用于顯示工作面實時人員信息)和1 臺隔爆兼本安型多路電源組成。通信信號裝置主機和顯示牌通過RS485 總線與讀卡器連接。
限員控制系統具備用戶自主設定限員區域的預報警人數、分時限員等功能,并且限員人數并不包含臨時性出入的巡檢人員。通過位置服務系統提供的人員實時位置信息,系統可判定當前區域的人員詳情。當區域人數超過設定人數時,井下信息顯示牌顯示總人數和人員姓名,同時信號主機播報超員報警,記錄詳細報警信息。
3.3 人機接近保護
人機接近保護裝置主要應用于采煤工作面液壓支架、轉載機、破碎機等大型移動設備中,設備通過感知自身(安裝接收器)與附近人員標識卡的距離信息實現急停或閉鎖保障人員安全。
以液壓支架人機接近保護為例,支架頂板上安裝本安讀卡器,工作人員攜帶標簽卡在支架下行走,讀卡器與電液控制器相連并上報定位數據,電液控制器根據定位數據進行危險區域判斷并進行支架運動控制。其安裝如圖4。

圖4 安裝位置示意圖
保護裝置工作過程中,定位卡動態監測周圍接收器,并與距離較近的UWB 接收器進行測距定位。讀卡器將測距結果上報給電液控制器,電液控制器根據測距結果判斷人員離本架的距離。當人員接近正在移架的液壓支架時,液壓支架閉鎖以保障人員安全。轉載機保護裝置是在轉載機入料口安裝UWB 接收器,防止轉載機運行過程中人員進入破碎機造成人身傷害。在轉載機入料口附近的危險區域內安裝幾臺UWB 接收器,定位周期根據標識卡與接收器的距離動態調整。當標識卡與接收器遠離時定位頻率自動下降,靠近時定位頻率自動提升。人員離入料口的危險距離、預警距離以及標簽定位周期與距離的關系等參數都可以靈活配置。
試驗表明:保護裝置定位精度達0.3 m,標簽卡定位周期動態調整范圍0.2~0.5 s,定位頻次最優達每秒5 次,最差條件下閉鎖響應的時間優于0.6 s。
3.4 智能輔助運輸
位置服務系統提供的定位數據為智能輔運系統實現車輛實時位置可視化管理、車速控制、車內人員信息查詢、車輛超員超速管理提供了數據支撐。
根據現場巷道條件安裝了定位接收器實現行車巷信號全覆蓋,膠輪車內安裝讀卡器接收乘車人員標識卡信息,接收器接收到標識卡信息同步傳輸至位置服務系統主機。其效果如圖5。
圖5 輔運系統效果圖
3.5 無人駕駛
無人駕駛是實現智慧礦山建設的一次創新實踐,針對井下復雜工礦環境實現井下無軌膠輪車自動駕駛。試驗車輛以線控底盤測試車為膠輪車原型,模擬無軌膠輪車線控系統和傳感器布局,研制自動駕駛域控制器、車載傳感器等一系列裝置,選取路線為井下中央變電所到井口,總長度4300 m 左右,包含兩個彎道,最大坡度7°,路線中共有21 個讀卡器實現信號全覆蓋。其布置如圖6。

圖6 無人駕駛讀卡器布置圖
實際測試時,安全員坐在主駕駛全程不做任何操作,僅以意外狀況下人工介入為目的。首先,運行車輛的實時定位數據可以有效保證車輛會車安全,如在交叉路口,車輛以系統提供的實時位置數據為參考,同時感知其他車輛或裝備的相互位置,綜合裁決車輛下一步操作,避免車輛碰撞;其次,無人駕駛車輛依賴井下位置服務系統提供定位數據,實現自身精準定位,結合車輛安裝的激光雷達、毫米波雷達等主動式定位裝置和井下高精地圖實現導航和無人駕駛。試驗結果顯示:測試車輛完成整段路程自動駕駛,實現了車速自動控制、爬坡、避障、繞彎等操作,最終抵達目的地,達到預期效果。
3.6 多系統融合
位置服務系統同時涵蓋支持多系統融合,目前已與安全監控、語音廣播、無線通訊等系統融合聯動。當采掘工作面出現氣體超限、人員超限或是其他緊急情況時,系統自動啟動聯動模式,區域作業人員的標識卡出現蜂鳴警示,警示燈會根據實際情況以不同方式閃爍,并聯動相關區域語音廣播發出報警。系統還具有雙向呼叫功能,作業人員可向地面監控主機發送求救信號。定位標識卡可在2~5 s內正確報警,經過隨機多輪多地點測試,聯動狀態穩定,效果良好,廣播和定位標識卡反應及時,滿足相關聯動要求。
4 結語
位置服務系統涵蓋了人員定位系統的核心需求,包括人、車、傳感器和各類裝備的實時位置監測管理,為礦井搶險救災提供可靠的位置信息,有效提高救災效率,降低事故的人員傷亡率。系統為煤礦智慧礦山建設、人機安全協同作業、機器人巡檢、無人駕駛等領域提供了重要的數據支撐。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
