基于BWI輻射效率的低氣動(dòng)噪聲共軸對(duì)轉(zhuǎn)螺旋槳的設(shè)計(jì)研究
2022-07-11 09:41:18呂昌昊胡天翔劉沛清
民用飛機(jī)設(shè)計(jì)與研究 2022年1期
關(guān)鍵詞:模態(tài)
呂昌昊 胡天翔 孫 韜 劉沛清
(北京航空航天大學(xué)陸士嘉實(shí)驗(yàn)室(航空氣動(dòng)聲學(xué)工業(yè)和信息化部重點(diǎn)實(shí)驗(yàn)室),北京 100191)
0 引言
早在上世紀(jì)80年代,共軸對(duì)轉(zhuǎn)螺旋槳就以其潛在的高氣動(dòng)效率引起科學(xué)界的關(guān)注。但是由于巨大的氣動(dòng)噪聲,最終淡出了人們的視野。目前已知的共軸對(duì)轉(zhuǎn)螺旋槳飛機(jī)也僅有蘇聯(lián)的圖95以及烏克蘭的安70,如圖1所示。但是過(guò)去20年內(nèi)由于燃料價(jià)格上升及航空需求的增加,共軸對(duì)轉(zhuǎn)螺旋槳高氣動(dòng)效率以及最大起飛重量大等優(yōu)勢(shì)再次被人們關(guān)注。同時(shí),氣動(dòng)噪聲學(xué)科的發(fā)展使得降低其噪聲成為可能。目前,歐盟已將其列為新一代發(fā)動(dòng)機(jī)的備選構(gòu)型進(jìn)行研究。

(a) 圖-95遠(yuǎn)程轟炸機(jī)

(b) 安-70軍用運(yùn)輸機(jī) 圖1 共軸對(duì)轉(zhuǎn)螺旋槳飛機(jī)
另一方面,近年來(lái)隨著環(huán)境意識(shí)增強(qiáng),噪聲早已被列入環(huán)境污染的一種。ICAO早已提出了逐步完善的飛機(jī)噪聲標(biāo)準(zhǔn)。因此,近10年來(lái)對(duì)于對(duì)轉(zhuǎn)螺旋槳的主要研究集中在氣動(dòng)噪聲領(lǐng)域。主要包括用于初設(shè)階段的氣動(dòng)、噪聲快速預(yù)測(cè)方法,通過(guò)高精度噪聲預(yù)測(cè)方法及實(shí)驗(yàn)方法對(duì)遠(yuǎn)場(chǎng)噪聲機(jī)理進(jìn)行研究以及降噪技術(shù)的研究。
螺旋槳噪聲按照聲源可以分為厚度噪聲、載荷噪聲以及寬頻噪聲。厚度噪聲是由于葉片厚度周期性的排開(kāi)空氣產(chǎn)生的噪聲。載荷噪聲則是由于葉片上的壓強(qiáng)分布反向作用于空氣上產(chǎn)生的。一切隨機(jī)發(fā)生的渦脫落及湍流尾跡脫落均導(dǎo)致寬頻噪聲,并且厚度噪聲與周期性的載荷噪聲統(tǒng)稱為離散噪聲。與單槳不同,共軸對(duì)轉(zhuǎn)螺旋槳的離散噪聲分為單螺旋槳噪聲的獨(dú)立噪聲和前后槳的干擾噪聲兩部分。對(duì)轉(zhuǎn)螺旋槳離散噪聲主要噪聲源按照產(chǎn)生機(jī)理分類,如圖2所示。首先,對(duì)轉(zhuǎn)槳的干擾噪聲是要遠(yuǎn)超獨(dú)立噪聲的。而對(duì)轉(zhuǎn)槳的干擾噪聲又可以分為前后槳的勢(shì)流干擾產(chǎn)生的噪聲以及前槳尾跡(BWI)及槳尖渦撞擊后槳(BVI)產(chǎn)生的干擾噪聲。已有研究證實(shí)了槳間的勢(shì)流干擾噪聲遠(yuǎn)低于黏性尾流撞擊后槳產(chǎn)生的噪聲。
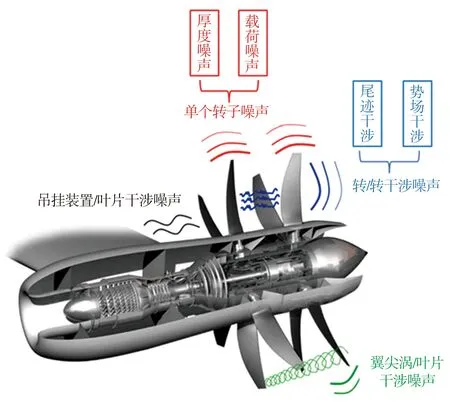
圖2 對(duì)轉(zhuǎn)螺旋槳噪聲
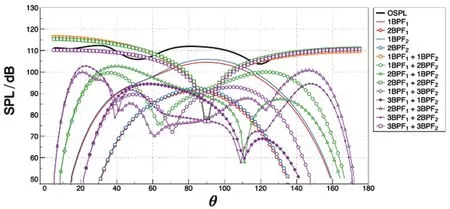
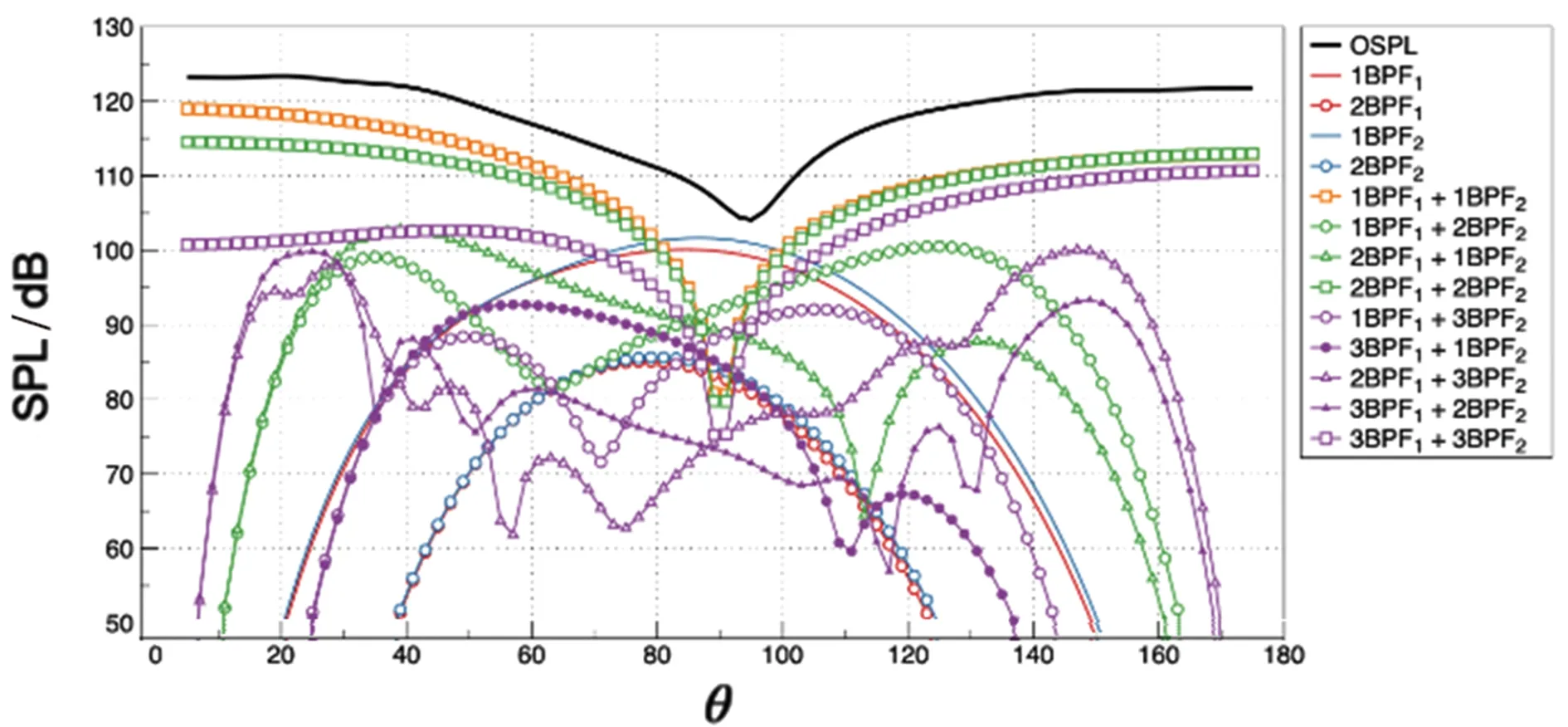
隨后,Horváth進(jìn)一步通過(guò)實(shí)驗(yàn)驗(yàn)證了該觀點(diǎn)并且列舉出角模態(tài)(|-|)相關(guān)矩陣,如圖3所示。圖中橫坐標(biāo)與縱坐標(biāo)分別為前槳和后槳在干涉頻率中占的階數(shù),如1BPF1+1BPF2。Horváth根據(jù)輻射效率隨角模態(tài)增加而減小的特性,推斷干擾噪聲也應(yīng)有類似表現(xiàn),即認(rèn)為輻射效率在遠(yuǎn)場(chǎng)噪聲中的主控性。從角模態(tài)矩陣可以看出,根據(jù)該理論的話對(duì)角線上的噪聲應(yīng)該較大,遠(yuǎn)離對(duì)角線時(shí)噪聲衰減迅速。
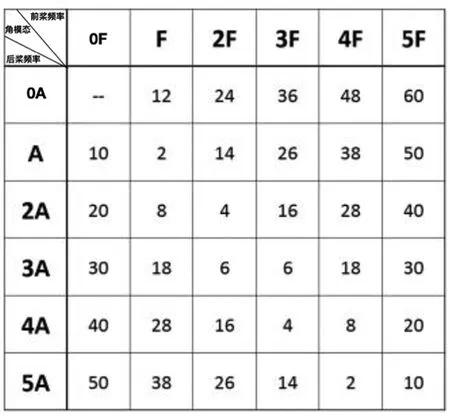
圖3 對(duì)轉(zhuǎn)槳角模態(tài)矩陣

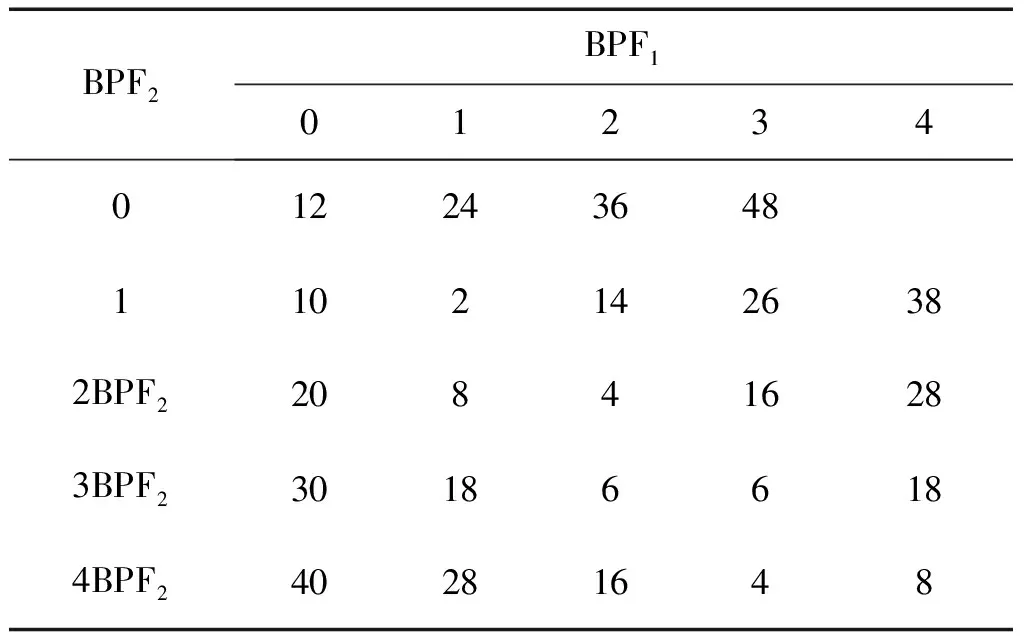
表1 12×10對(duì)轉(zhuǎn)槳角模態(tài)矩陣
表2 12×12對(duì)轉(zhuǎn)槳角模態(tài)矩陣
然而從角模態(tài)及輻射效率的角度考慮,不等槳葉數(shù)對(duì)轉(zhuǎn)槳也可以成為很好的選擇。本文通過(guò)對(duì)轉(zhuǎn)槳BWI及獨(dú)立噪聲快速預(yù)測(cè)方法,對(duì)從低至高的(單排6-12)前后等槳葉數(shù)對(duì)轉(zhuǎn)槳進(jìn)行了研究。結(jié)果表明雖然低槳葉數(shù)與高槳葉數(shù)對(duì)轉(zhuǎn)槳的氣動(dòng)噪聲特性不同,但是總體上前后指向性的高聲壓區(qū)仍然是由BWI噪聲控制。同時(shí)等槳葉數(shù)的設(shè)計(jì)只是使高聲壓區(qū)更集中,卻無(wú)法對(duì)其進(jìn)行降低。隨后,對(duì)比了不同槳葉數(shù)共軸對(duì)轉(zhuǎn)螺旋槳遠(yuǎn)場(chǎng)氣動(dòng)噪聲的表現(xiàn),認(rèn)為不等槳葉數(shù)對(duì)轉(zhuǎn)槳?dú)鈩?dòng)噪聲普遍優(yōu)于等槳葉數(shù)情況。
1 方法與構(gòu)型
1.1 對(duì)轉(zhuǎn)槳尾跡干擾噪聲頻域預(yù)測(cè)方法
在單槳頻域噪聲預(yù)測(cè)中,聲壓可以表示為:

這里可以表示為:

(2)
對(duì)于對(duì)轉(zhuǎn)槳,同樣有類似的參量定義。方程(3)和方程(4)分別為對(duì)轉(zhuǎn)槳前、后槳干擾噪聲公式,其中及為干擾噪聲的諧波分量。
將中輻射效率以外的項(xiàng)均當(dāng)作前、后槳徑向分布的源強(qiáng)項(xiàng)()及(),則1及2如下:

同樣的,貝塞爾函數(shù)部分代表了對(duì)轉(zhuǎn)槳前、后槳發(fā)出的干擾噪聲的遠(yuǎn)場(chǎng)輻射效率,這里前后槳具有相同的輻射效率-。上述公式在使用時(shí)需要提供槳葉徑向的源強(qiáng)項(xiàng),這通常通過(guò)CFD計(jì)算或片條理論完成。本文采用共軸對(duì)轉(zhuǎn)螺旋槳片條理論對(duì)槳上葉素氣動(dòng)力進(jìn)行計(jì)算。
1.2 對(duì)轉(zhuǎn)槳研究工況
本文使用的對(duì)轉(zhuǎn)槳為某型6×6共軸對(duì)轉(zhuǎn)螺旋槳,前后槳轉(zhuǎn)速均為1 075 rpm。同時(shí),前后槳直徑為3.95 m,其幾何布局如圖4所示。
圖4 共軸對(duì)轉(zhuǎn)螺旋槳三維視圖
對(duì)轉(zhuǎn)槳噪聲的研究應(yīng)在保證其氣動(dòng)表現(xiàn)基本不變的情況下進(jìn)行,這可以通過(guò)調(diào)整包括弦長(zhǎng)、扭角及翼型等槳葉參數(shù)完成。本文研究使用調(diào)整安裝角來(lái)調(diào)整整體扭角的方式對(duì)氣動(dòng)表現(xiàn)進(jìn)行調(diào)整。研究的基準(zhǔn)工況為6×6,前后槳安裝角均為34°。其起飛氣動(dòng)力表現(xiàn)為:T = 43.0 KN, P = 3 933.6 KW。在等槳葉數(shù)研究中,對(duì)6×6、8×8、10×10、12×12在前后安裝角一致的情況下進(jìn)行調(diào)整,氣動(dòng)力與安裝角見(jiàn)表3。這里由于基準(zhǔn)構(gòu)型為6×6,無(wú)法簡(jiǎn)單的通過(guò)調(diào)整安裝角的方式得到氣動(dòng)表現(xiàn)比較接近的4×4構(gòu)型,因此未對(duì)其進(jìn)行研究。同時(shí)12×12槳在31°以下氣動(dòng)力計(jì)算發(fā)散,因此取31.1°作為研究對(duì)象。
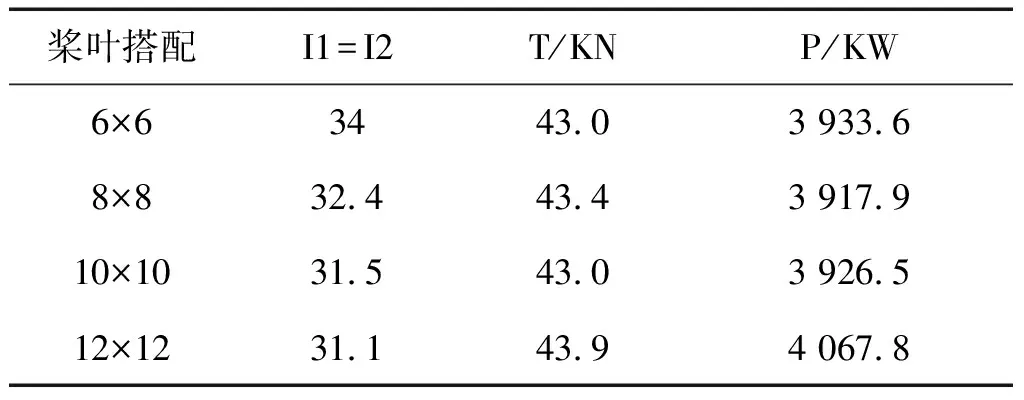
表3 等槳葉數(shù)對(duì)轉(zhuǎn)槳安裝角與氣動(dòng)表現(xiàn)
為了研究不等槳葉數(shù)對(duì)BWI的影響,同樣需要通過(guò)調(diào)整安裝角使各自的氣動(dòng)力表現(xiàn)與原等槳葉槳一致。在槳葉總數(shù)為12的情況下,不同前后槳槳葉數(shù)搭配的對(duì)轉(zhuǎn)槳槳葉安裝角及氣動(dòng)力表現(xiàn)見(jiàn)表4。
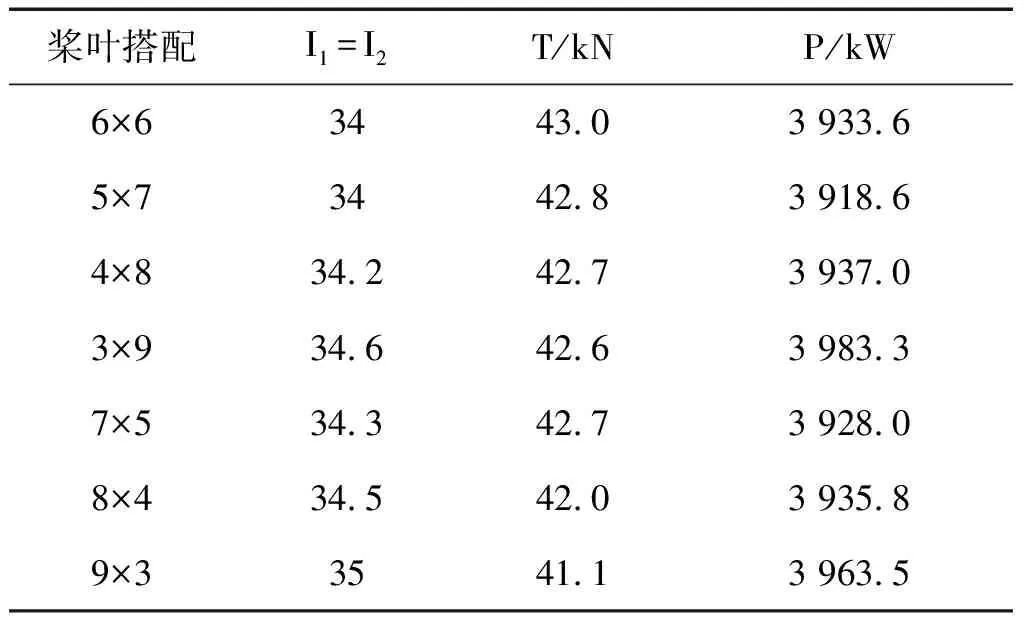
表4 不等槳葉數(shù)對(duì)轉(zhuǎn)槳安裝角與氣動(dòng)表現(xiàn)
2 結(jié)果與討論
2.1 誘導(dǎo)角修正
上述對(duì)轉(zhuǎn)槳BWI干擾噪聲公式由Parry于2019年推導(dǎo)得出。但是在其推導(dǎo)過(guò)程并未考慮前槳尾跡由于誘導(dǎo)產(chǎn)生的誘導(dǎo)角度,如圖5所示。
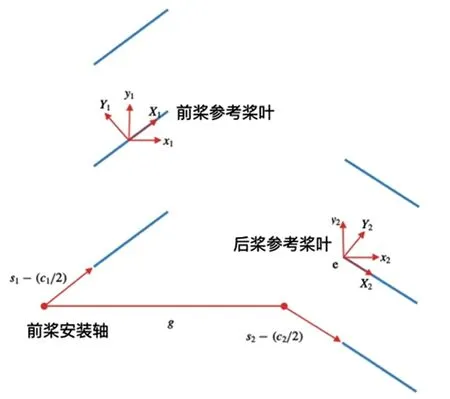
(a) 對(duì)轉(zhuǎn)槳尾跡撞擊模型
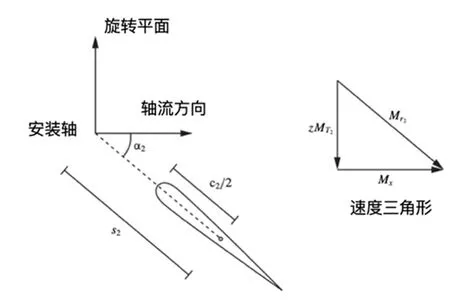
(b) 對(duì)轉(zhuǎn)槳葉素三角形圖5 無(wú)誘導(dǎo)角的BWI噪聲模型
真實(shí)對(duì)轉(zhuǎn)槳前槳實(shí)際入流角受到前槳自身以及后槳對(duì)前槳的誘導(dǎo)作用,如圖6(a)所示。為此,需要在噪聲計(jì)算公式中加入由片條理論計(jì)算得出的前槳誘導(dǎo)角度進(jìn)行修正。圖6(b)為考慮誘導(dǎo)角的BWI聲壓與未考慮誘導(dǎo)角的BWI的對(duì)比,可見(jiàn)誘導(dǎo)角對(duì)聲壓影響較大,不應(yīng)該被忽略。
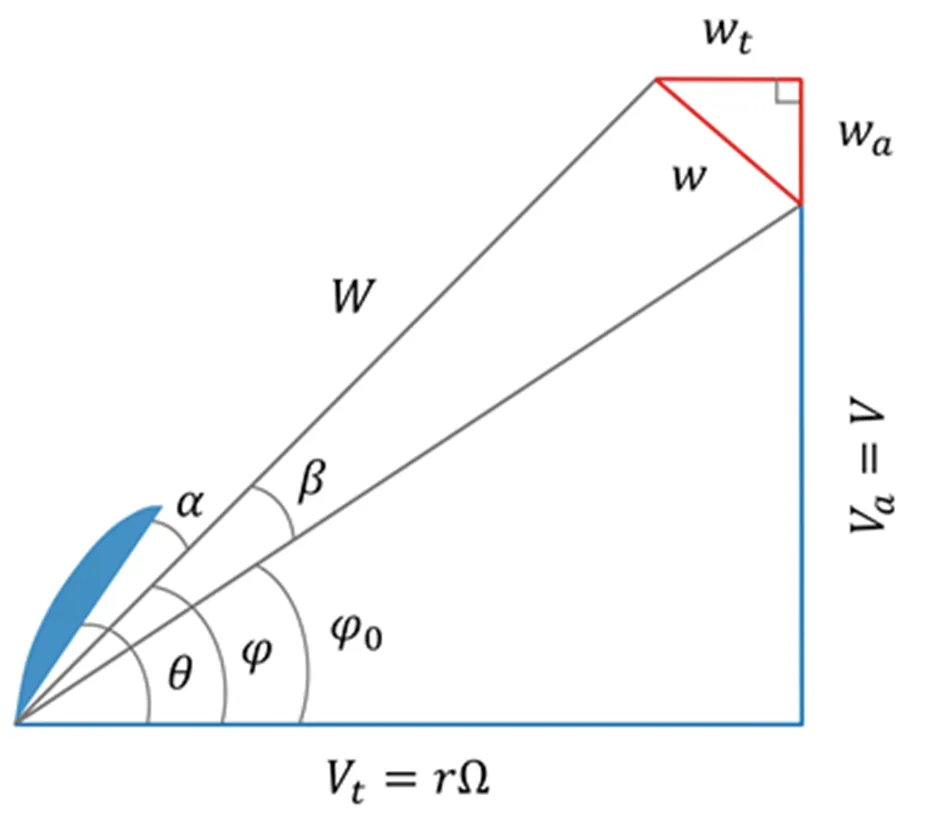
(a) 帶誘導(dǎo)角修正的對(duì)轉(zhuǎn)槳葉素三角形
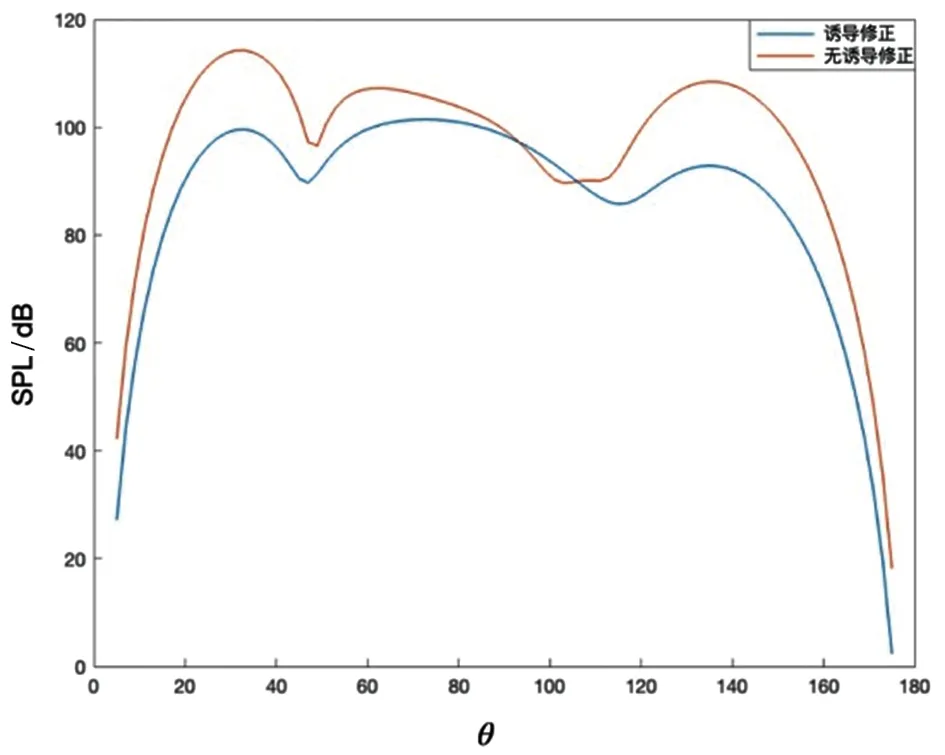
(b) 誘導(dǎo)角修正對(duì)BWI模型的影響圖6 BWI模型的誘導(dǎo)角修正
2.2 等槳葉數(shù)氣動(dòng)噪聲表現(xiàn)
噪聲預(yù)測(cè)中,遠(yuǎn)場(chǎng)麥克風(fēng)取在半徑為10 m,間隔2°的半圓上。不同槳葉數(shù)的等槳葉數(shù)對(duì)轉(zhuǎn)槳遠(yuǎn)場(chǎng)噪聲指向性如圖7所示,其中OASPL取至3階干擾諧波。
首先,單槳獨(dú)立噪聲隨槳葉數(shù)增加下降很明顯,因此槳平面附近OASPL隨槳葉數(shù)增加而減小。但是槳葉數(shù)越大,前后指向性的干擾噪聲就越大。這是由于槳葉數(shù)相等時(shí)1階諧波BWI的角模態(tài)為0,此時(shí)BWI干擾噪聲輻射效率為1,噪聲主要指向前后方向。這也從輻射效率的角度說(shuō)明了等槳葉數(shù)的設(shè)計(jì)只能使遠(yuǎn)場(chǎng)噪聲指向性更加集中,而不能從根本上減弱它們。
(a) 6×6
(b) 8×8
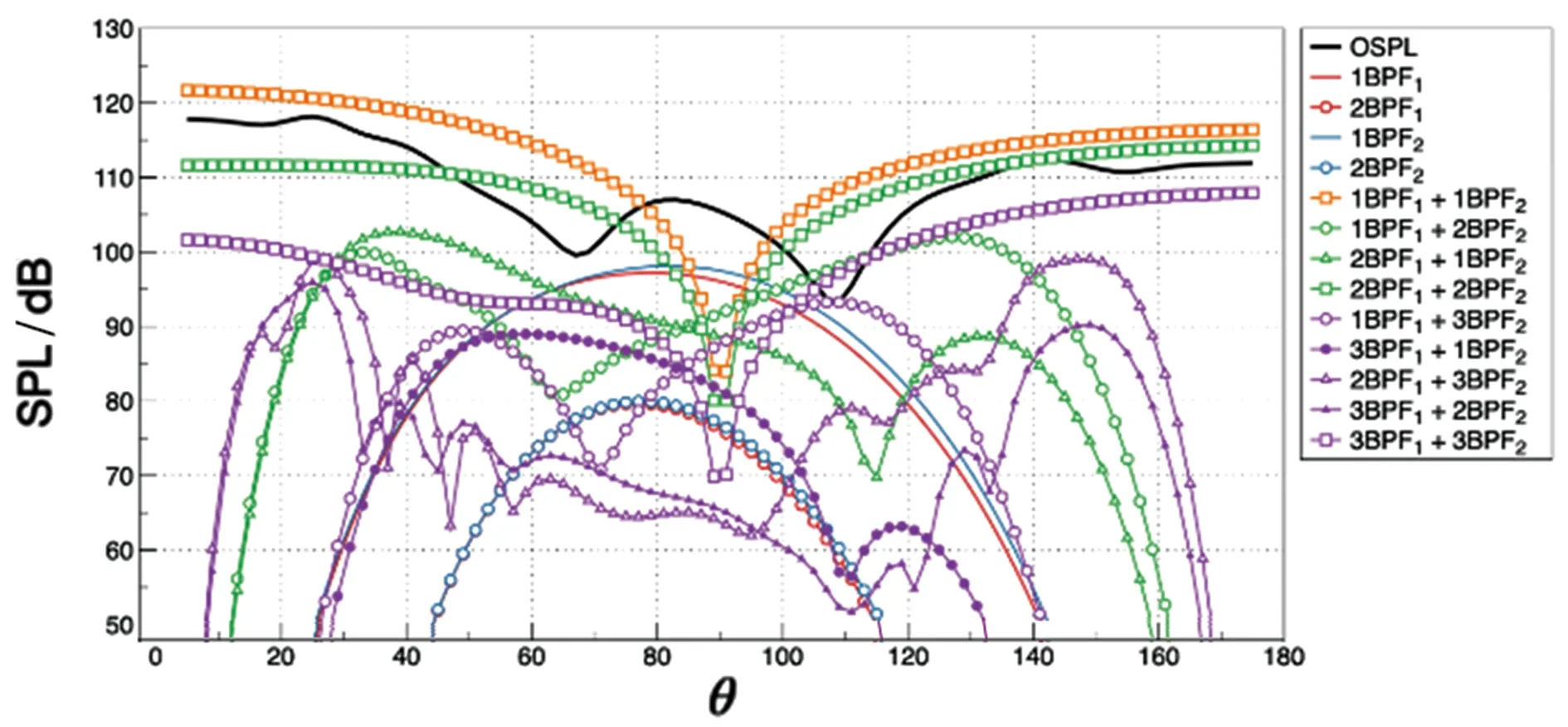
(c) 10×10
(d) 12×12圖7 等槳葉數(shù)對(duì)轉(zhuǎn)槳各階諧波指向性
2.3 不等槳葉數(shù)氣動(dòng)噪聲表現(xiàn)
圖8為槳葉總數(shù)為12的情況下,不同前后槳槳葉數(shù)搭配的對(duì)轉(zhuǎn)槳遠(yuǎn)場(chǎng)OASPL指向性。首先可以看到,前后槳葉數(shù)對(duì)稱的構(gòu)型OASPL雖然并不完全一致,但是整個(gè)指向性曲線平均來(lái)看最大聲壓差別不大。這說(shuō)明對(duì)于前后槳葉數(shù)對(duì)稱的對(duì)轉(zhuǎn)槳,其BWI差別不大。同時(shí)可以看到,5×7搭配的BWI最低,而4×8搭配的BWI甚至要高于等槳葉數(shù)情況。這說(shuō)明不等槳葉數(shù)搭配并不一定絕對(duì)導(dǎo)致噪聲的降低。至于5×7搭配噪聲較低原因會(huì)在下文解釋。
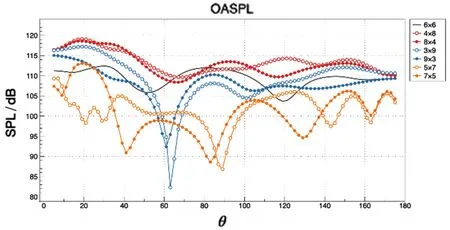
圖8 不等槳葉數(shù)對(duì)轉(zhuǎn)槳OASPL指向性
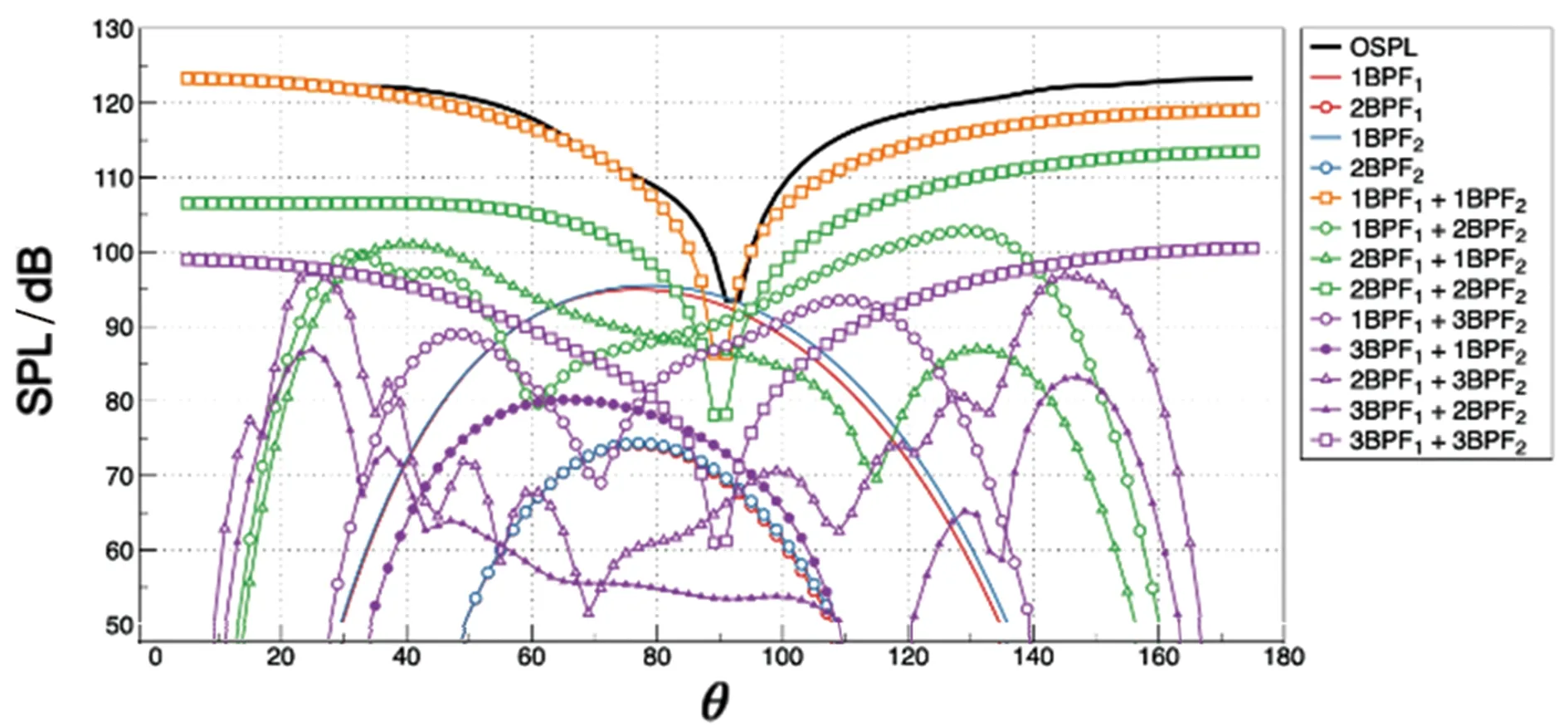
圖9為5×7構(gòu)型各階諧波與6×6構(gòu)型各階諧波聲壓對(duì)比。可以看到5×7在3階干擾諧波以內(nèi)并未出現(xiàn)如同6×6類似的前后非常高的干擾噪聲,這是由于該類干擾噪聲是由于對(duì)應(yīng)頻率的角模態(tài)為0導(dǎo)致輻射效率為1而引起的。對(duì)于5×7構(gòu)型,其角模態(tài)為0的干擾頻率最早出現(xiàn)也要在7BPF+5BPF時(shí)才會(huì)出現(xiàn)。圖中特意對(duì)直到7階干擾噪聲的OASPL進(jìn)行了計(jì)算,結(jié)果證實(shí)對(duì)于5×7構(gòu)型即使包含了角模態(tài)為0的干擾噪聲,其總聲壓級(jí)也不會(huì)顯著提高。這是由于7階干擾噪聲自身隨諧波的衰減導(dǎo)致的。同時(shí),7BPF+5BPF仍然處在高水平也從側(cè)面證實(shí)了輻射效率對(duì)遠(yuǎn)場(chǎng)噪聲主控地位。
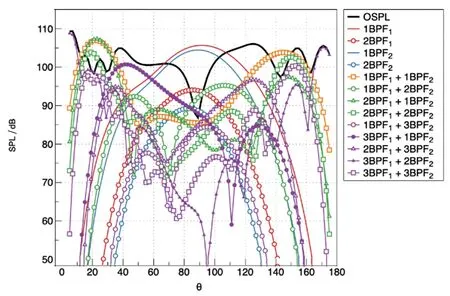
圖9 5×7對(duì)轉(zhuǎn)槳各階諧波指向性
3 結(jié)論
本文首先介紹了對(duì)轉(zhuǎn)槳噪聲的類別。隨后從對(duì)轉(zhuǎn)槳BWI頻域快速預(yù)測(cè)方法出發(fā),引入了誘導(dǎo)角對(duì)該公式的影響。并對(duì)比了有無(wú)誘導(dǎo)角時(shí)對(duì)轉(zhuǎn)槳聲壓指向性的差別。
前后等槳葉數(shù)情況下,對(duì)轉(zhuǎn)槳離散噪聲的OASPL隨槳葉數(shù)有不同特性。槳葉數(shù)很大時(shí),BWI干擾噪聲對(duì)OASPL起主要貢獻(xiàn)。隨著槳葉數(shù)的降低,獨(dú)立噪聲對(duì)旋轉(zhuǎn)平面中部指向性貢獻(xiàn)增大,主控該區(qū)域OASPL。
輻射效率對(duì)共軸對(duì)轉(zhuǎn)螺旋槳的BWI起著絕對(duì)的主控作用。前后槳葉數(shù)相反6×8、8×6的構(gòu)型,OASPL相差不大。從槳葉數(shù)的角度考慮,對(duì)轉(zhuǎn)槳應(yīng)該盡量去選擇前后槳葉數(shù)能滿足角模態(tài)為0的干擾噪聲出現(xiàn)在更高的階數(shù)這一條件。后續(xù)研究將集中在通過(guò)高精CFD與FWH相結(jié)合的混合算法對(duì)對(duì)轉(zhuǎn)槳槳葉數(shù)對(duì)對(duì)轉(zhuǎn)槳的氣動(dòng)及噪聲的影響進(jìn)行更深入的研究。
猜你喜歡
成都信息工程大學(xué)學(xué)報(bào)(2022年4期)2022-11-18 07:31:14
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:12
工程與建設(shè)(2019年1期)2019-09-03 01:12:12
廣州大學(xué)學(xué)報(bào)(自然科學(xué)版)(2016年2期)2017-01-15 13:43:00
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39
振動(dòng)工程學(xué)報(bào)(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36