輪足式爬壁機器人的磁吸附結構設計與優化
2022-07-10 14:58:06趙金亮張小俊吳亞淇謝必成
科學技術與工程 2022年16期
趙金亮, 張小俊, 吳亞淇, 謝必成
(河北工業大學機械工程學院, 天津 300401)
近年來,隨著中國勞動力成本的不斷上漲,機器人協助或代替人工進行大型金屬立面維護機器人作業已受到越來越多人的關注。通過開發爬壁特種機器人,可以減少對自然環境造成的污染,降低工作風險和強度,提高勞動效率。
Abdulkade等[1]提出了一種名為Sparrow的船體自主檢測機器人,4個電磁輪吸附在不同厚度的金屬板上,從而完成特殊任務。Hu等[2]設計的檢測爬壁機器人,將磁吸附模塊安裝在分體式移動機構上,能夠適應單一曲面的爬壁作業。宋偉等[3]提出了一種磁吸附爬壁輪式機器人,將永磁吸附結構安裝在輪上,優化磁吸附組件結構,得到最優的結構參數。趙軍友等[4]提出了一種噴砂除銹爬壁機器人,磁吸附單元組裝在履帶上,由磁性履帶提供吸附力,對磁吸附單元的結構參數進行定量分析,得到各個參數與吸附力之間的變化規律,使其提供更大的吸附力。陳彥臻等[5]針對永磁輪吸附式爬壁機器人提出了一種永磁輪設計方案,采用軸向相反充磁方式,改進了混合型環狀對稱磁路,吸附力提高了30% 以上。然而,上述爬壁機器人均采用履帶或輪式移動方式,由于移動方式多采用輪、履與永磁吸附單元相結合模式,導致機器人無法翻越較高的障礙,限制了其應用場合,因此越障靈活性變得尤為重要。
為此,針對一種具有越障能力的三段式輪足爬壁機器人本體,設計一種體積小、單位磁能積大、磁鐵-軛鐵-磁鐵交叉排布且能夠在機器人越障時提供可靠吸附力的復合式變磁力吸附模塊。通過對復合式變磁力吸附模塊各參數的逐級優化,得到較優的復合式變磁力吸附模塊結構。
1 三段式輪足爬壁機器人本體設計
針對目前常見的爬壁機器人越障能力較弱這一不足,創新性地提出了一種三段式輪足爬壁機器人本體模型[6],如圖1所示,機器人本體分為三部分,每一部分都搭載相同的行走、磁吸附模塊,且機器人本體底面距離壁面的高度大于100 mm,遇到障礙時,機器人本體高度無需改變,只需調節越障部分機器人本體上所搭載的行走、磁吸附模塊,而其余兩段無需越障的機器人本體上所有部件高度無需調節,機器人相對于壁面的吸附力、驅動等均由這兩部分提供。
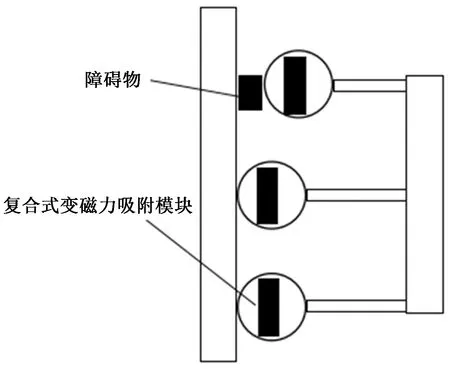
圖1 三段式機器人本體越障示意圖
三段式機器人本體結構雖然在結構上較為復雜化,但能夠使機器人的各部分完美適應高障礙的壁面環境,進而使其具備了良好的壁面通過性。
在大型金屬立面維護機器人作業過程中,不僅要考慮機器人的越障功能,還需考慮如何去滿足其較為優異的壁面吸附性。機器人賴以停駐在壁面基本條件便是由吸附力所產生的摩擦力足夠大。而可靠的吸附力是由復合式變磁力吸附模塊為機器人運行提供的,如果吸附力過大,機器人靈活性降低,難以在壁面上轉彎甚至行駛,如果吸附力較小,那么機器人會發生滑移傾覆的危險。
目前市面上爬壁機器人有很多種吸附方式以保證其本體的正常工作,其中主要包括負壓吸附、真空吸附、仿生吸附、永磁吸附、電磁吸附等[7-8],同樣各有其優缺點。結合磁吸附原理及越障原理,設計一種體積小,單位磁能積大,且能夠在機器人越障時提供可靠吸附力的復合式變磁力吸附模塊[9],如圖2所示,為輪足式越障爬壁機器人的磁吸附優化設計奠定基礎。
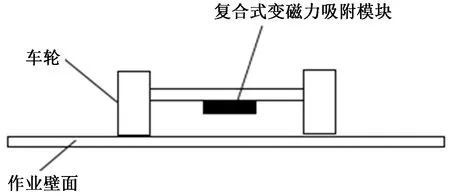
圖2 復合式變磁力模塊安裝位置
2 吸附模塊結構設計
充磁方向上選擇沿垂直壁面方向充磁,泄露磁通最少[10]。采用磁鐵-軛鐵-磁鐵交叉排布的方式,這種辦法能極大增強整體磁場強度,結構如圖3所示[11]。永磁鐵主要選擇磁性材料釹鐵硼(Nd2Fe14B),它是目前為止磁性最優秀的稀土材料[12]。

wy1為磁鐵寬度;hy2為磁鐵厚度;wp2為軛鐵寬度;hp2為軛鐵厚度;hg為磁鐵到壁面的距離;hi為壁面的厚度
引入電磁鐵,附著于永磁鐵之上,通過電磁鐵電流的正反向導致其正反向充磁,進而使復合式變磁力吸附模塊所提供的壁面吸附力可以不斷適應機器人所需,圖4為簡化的電磁鐵正反向充磁時磁感線分布。

圖4 電磁鐵正反向充磁時磁感線分布圖
可以明顯發現,電磁鐵充磁方向與永磁鐵相同時,磁感線分布較為混亂,有效磁通較少,當電磁鐵充磁方向與永磁鐵相反時,磁感線分布較為順序,有效磁通大,所能產生的吸附力就大。
3 基于機器人越障條件的吸附模塊結構優化設計
當機器人在平整壁面上豎直直線行駛時,每組復合式變磁力吸附模塊需要為機器人提供1 333.3 N的吸附力,機器人便能正常運行,而在機器人前輪越障的過程中,第二組復合式變磁力吸附模塊需要為機器人提供3 200 N的吸附力才能保證機器人的正常運行。通過設定優化函數對復合式變磁力吸附模塊的各項參數進行逐級優化設計。
3.1 壁面間距設計及優化
在Ansoft Maxwell中建立磁鐵簡單模型為120 mm(長)×200 mm(寬)×30 mm(高),不考慮磁鐵內部結構,模型為整塊釹鐵硼材料永磁鐵,壁面采用Q235鋼材質厚度24 mm,邊界條件設置為25%,將壁面位置固定,磁鐵位置高度為24~34 mm,即其底面距離壁面上表面范圍為0~10 mm,仿真步長為0.1 mm。對壁面所受吸附力進行仿真分析,可得仿真結果如圖5所示。

圖5 磁鐵與壁面距離對吸附力的影響仿真結果
可以看出,在磁鐵位置于24~34 mm變化期間,磁鐵與壁面間距離由0變為0.1 mm時,吸附力雖然較大,但其數值由1.62 kN跌至1.2 kN,呈現斷崖式下跌;而當磁鐵與壁面間距離由1 mm變為4 mm時,吸附力數值由1.2 kN跌至0.76 kN,雖然總體下跌趨勢不陡,但其變化不太均勻;而當磁鐵與壁面間距離由4 mm變為10 mm時,吸附力數值由0.76 kN跌至接近于0,總體下跌趨勢不陡,且變化均勻。為了滿足機器人運行穩定型,取4 mm為復合式變磁力模塊底面與壁面間的通用距離。
顯而易見,在相同的其他參數條件下,磁鐵厚度越大,其所產生的壁面吸附力越大,因此將復合式變磁力模塊整體厚度設計為38 mm。
3.2 軛鐵厚度設計及優化
軛鐵厚度優化模型簡化如圖6所示。
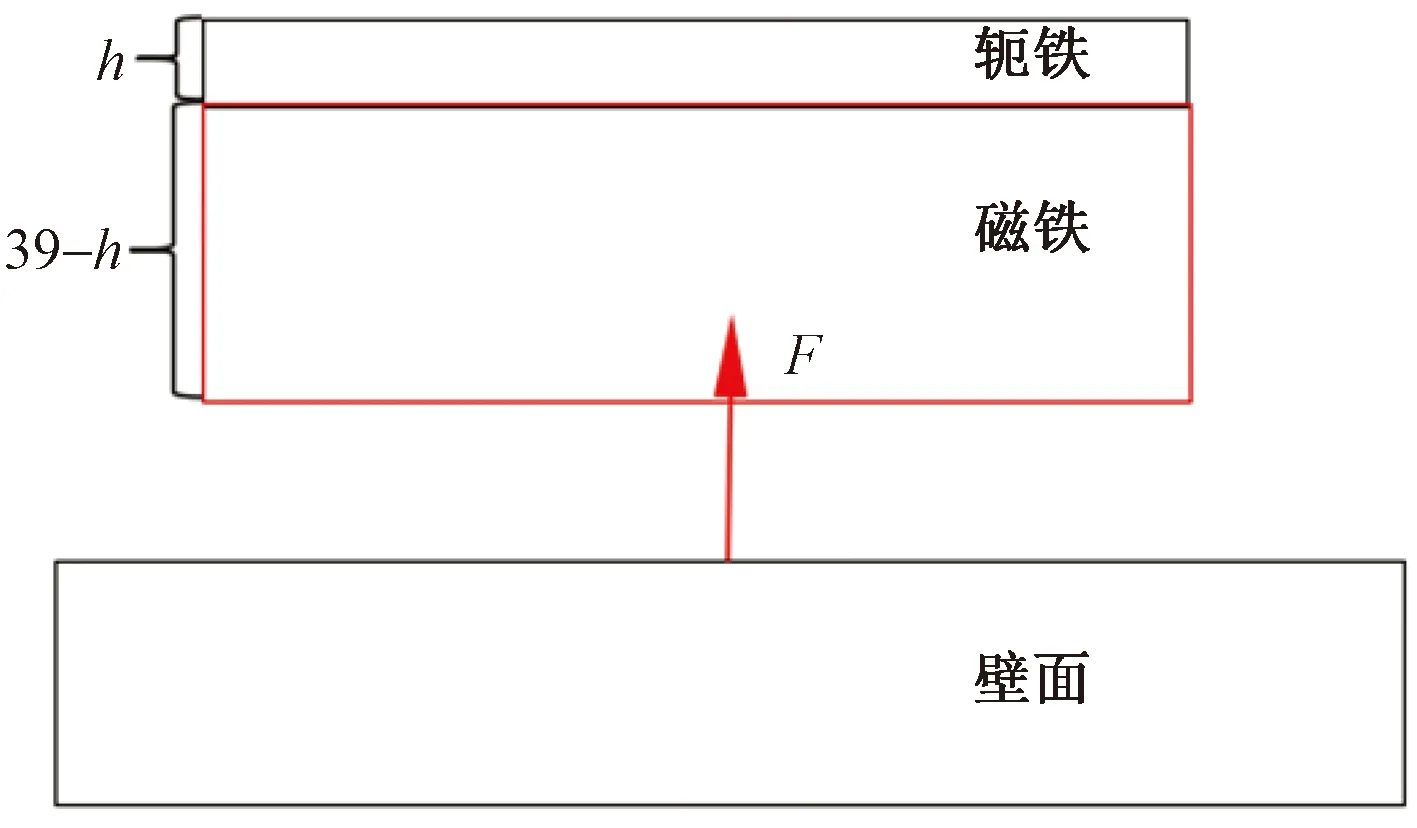
磁鐵下表面與壁面距離為4 mm;軛鐵厚度為h,mm;磁鐵厚度為(39-h) mm;h取值范圍為0.1~10 mm;F為壁面所受吸附力
設模型中各部分位姿S的方程為

(1)
式(1)中:(x,y,z)為模型部件起始位置;(Δx,Δy,Δz)為部件長寬高值,可得優化模型中各部件位姿為
(2)
式(2)中:S1為壁面位姿;S2為磁鐵位姿;S3為軛鐵位姿。
依據上述模型位姿,在Ansoft Maxwell建立模型,并輸入各項已定參數,材質、邊界、仿真步長等條件與3.1節相同。可得吸附力仿真結果如圖7所示。
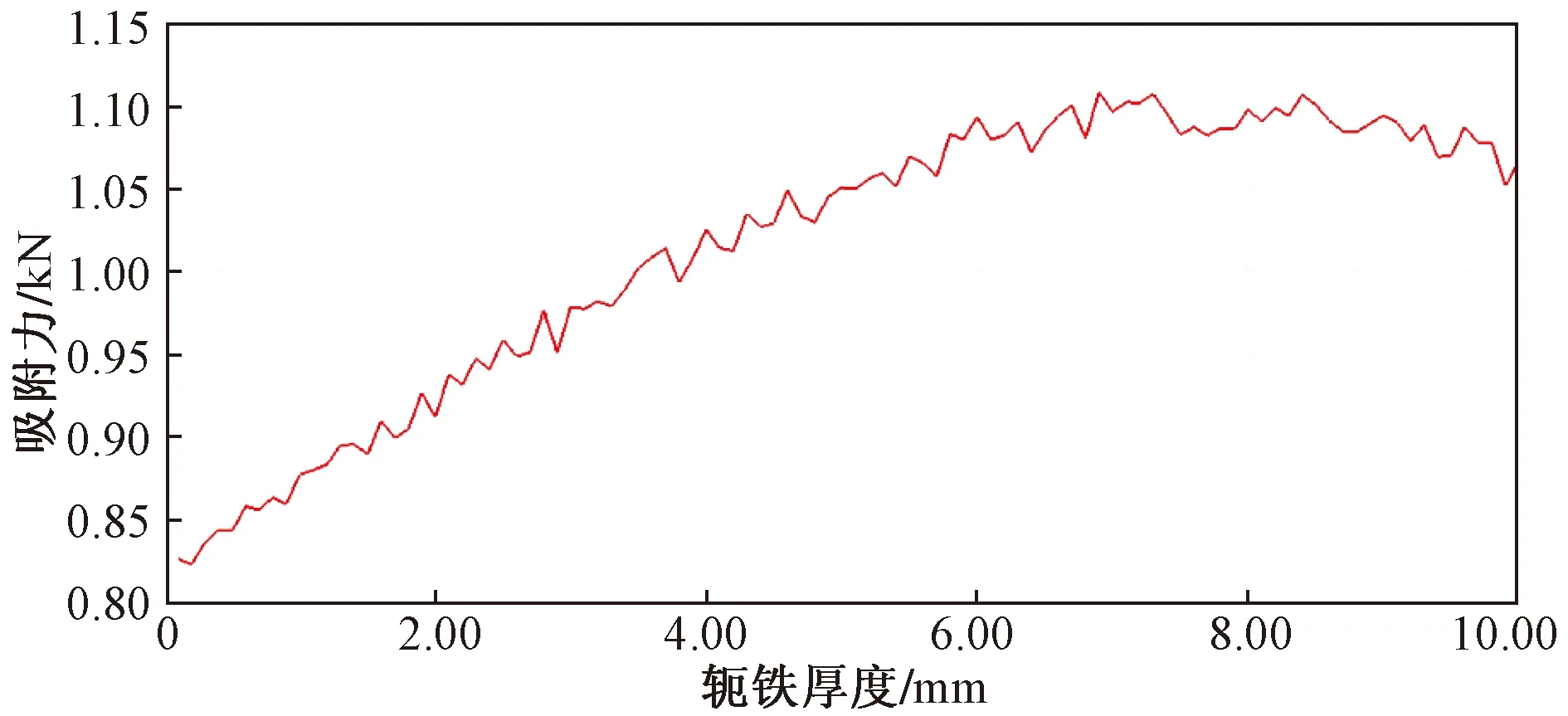
圖7 不同軛鐵厚度吸附力仿真結果
可以看出,加入軛鐵后,雖然磁鐵厚度沒有之前大,但產生的吸附力相較之前卻增大很多。當h在0.1~6.5 mm變化時,吸附力由0.82 kN持續增大至1.1 kN,而h在6.5~10 mm變化時,吸附力不變甚至發生下降,因此取軛鐵厚度為6.5 mm,因此磁鐵厚度設計為32.5 mm。
3.3 磁鐵間隙軛鐵厚度設計及優化
復合式變磁力吸附模塊中由于采取磁鐵-軛鐵-磁鐵的排列方式,因此,每兩塊磁鐵間隙的軛鐵寬度對整個模塊所產生的吸附力影響同樣很重要。由于其結構較為復雜,因此將這一部分磁鐵模型簡化,如圖8所示。
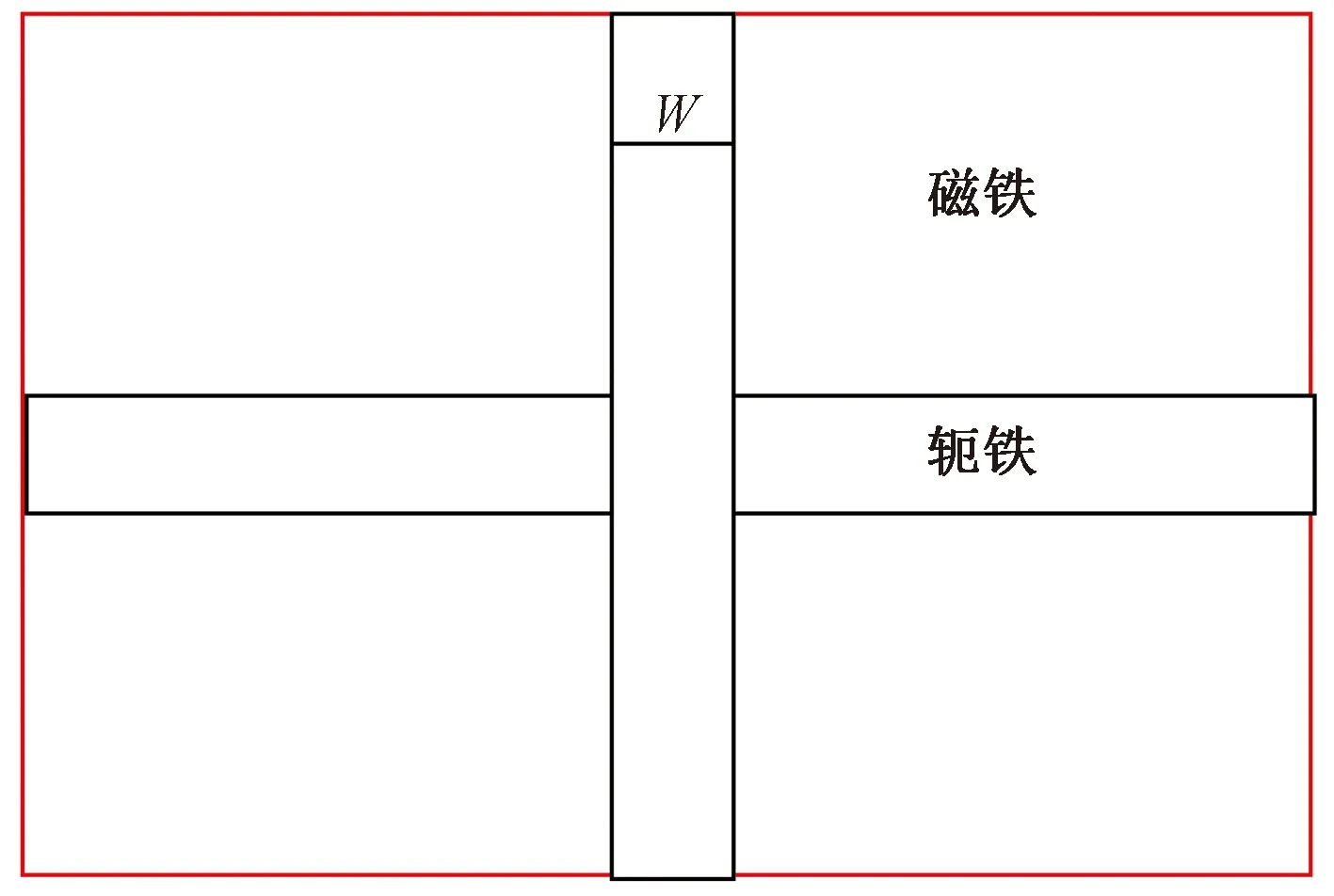
W為磁鐵間隙的軛鐵厚度
從圖9可以看出,加入軛鐵后,雖然磁鐵體積沒有之前大,但產生的吸附力相較之前卻增大很多。磁鐵間隙的軛鐵厚度為W,當W在0.1~2 mm變化時,吸附力基本無變化,而W在2~10 mm變化時,吸附力從1 kN增大至2.25 kN。為保證復合式變磁力吸附模塊自重不至于過大,將磁鐵間隙的軛鐵厚度設計為6 mm。
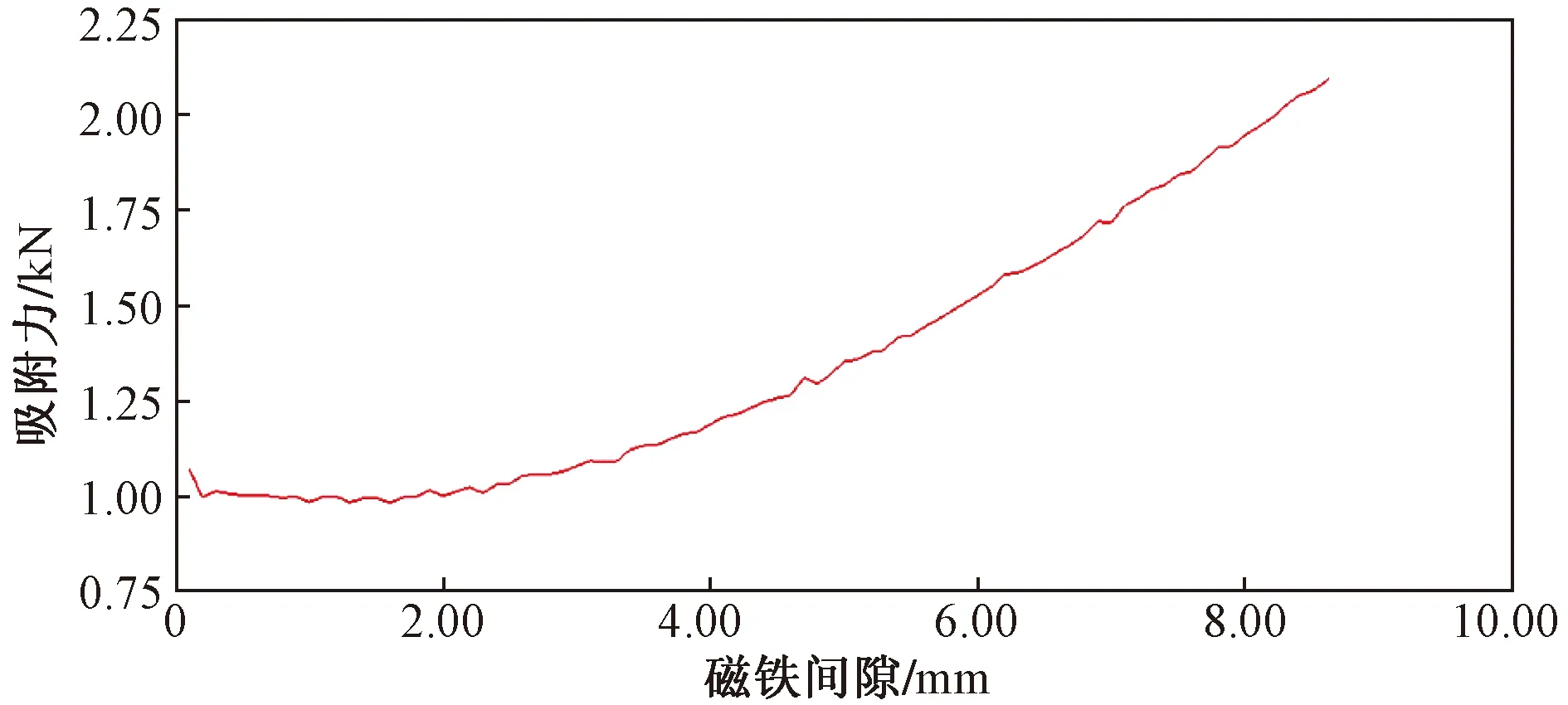
圖9 不同磁鐵間隙吸附力仿真結果
3.4 電磁鐵等效變換
由于電磁鐵仿真本就復雜,而所述復合式變磁力吸附模塊結構也很復雜,因此在仿真前將電磁鐵等效為永磁鐵能夠簡化分析仿真過程。電磁鐵直徑為40 mm,高度為20 mm,貼合壁面時可以提供250 N的壁面吸附力。因此將電磁鐵模型簡化為直徑40 mm,高度為H的永磁鐵,但其充磁方向可以正反調節。將電磁鐵模型建立于Ansoft Maxwell中,將H設置為變量,其變化范圍為5~20 mm,壁面環境等條件還原電磁鐵工作實際環境。得出其所提供的吸附力變化曲線如圖10所示。

圖10 電磁鐵等效變化仿真曲線
從圖10中可以看出,當模型可以提供250 N吸附力時,H為13.5 mm。因此,在后續的磁場仿真中,將電磁鐵等效變換為直徑40 mm,厚度13.5 mm的釹鐵硼材料永磁鐵。
3.5 磁鐵寬度及磁鐵間隙數設計及優化
在定值總體寬度的限制下,每組磁鐵的寬度,以及磁鐵間隙軛鐵數量關系為
(3)
式(3)中:P為單個永磁鐵寬度,mm;Q為軛鐵列數。
由于軛鐵列數過密會導致機器人復合式變磁力吸附模塊總重量,得不償失,因此將軛鐵列數設定為4、5、6。由于復合式變磁力吸附模塊中間一列需要放置電磁鐵,所以中間一列軛鐵列數不變,且長度均為電磁鐵直徑長度40 mm。
將Q=4、5、6分別代入式(3)中,可得P=62.67、45.6、35.2 mm。分別用Solidworks對以上數據進行建模。得到三組軛鐵不同的復合式變磁力吸附模塊結構如圖11所示。其中復合式變磁力吸附模塊總體長度為132 mm,寬度為212 mm,厚度為39 mm。
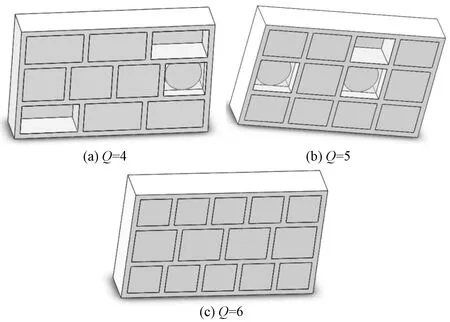
圖11 不同軛鐵列數下復合式變磁力吸附模塊結構圖
將3個模型分別導入Ansoft Maxwell中仿真結果如圖12所示。可以發現,每組復合式變磁力吸附模塊在x、y軸方向產生的吸附力值均接近于0,可見所設計的復合式變磁力吸附模塊漏磁較少,磁感線分布集中而均勻,結構設計較為合理。當Q=4時,整個復合式變磁力吸附模塊所產生的吸附力最大,為3 017.3 N,因此,在結構設計中,復合式變磁力吸附模塊寬度設計為212 mm,前后兩行每個永磁鐵寬度設計為63.67 mm,軛鐵列數為4,中央一行永磁鐵寬度設計為45.5 mm,軛鐵列數為5,長度設計為40 mm,厚度為12.5 mm。

F(x)、F(y)、F(z)分別為每組復合式變磁力吸附模塊在x、y、z軸方向產生的吸附力,N;Mag(F)為整個復合式變磁力吸附模塊所產生的吸附力,N
4 復合式變磁力吸附模塊優化結果
通過優化充磁方式后,可以得到機器人在不同壁面面積下所能產生的吸附力如圖13所示。

F(x)、F(y)、F(z)分別為每組復合式變磁力吸附模塊在x、y、z軸方向產生的吸附力,N;Mag(F)為整個復合式變磁力吸附模塊所產生的吸附力,N
可以看出,在將壁面面積增大到一定程度后,吸附力基本穩定在3 137 N左右,與3 200 N僅相差63 N。而在之前的設計中,由于將電磁鐵等效變換為了永磁鐵,雖然其底面面積相同,但變換為永磁鐵后,電磁鐵體積縮小厚度降低,在仿真過程中,其上表面距離復合式變磁力吸附模塊的上部磁鐵有6.5 mm的氣隙,但實際的電磁鐵上表面是緊挨軛鐵的,這在一定程度上降低了吸附力總和。因此在實際工作環境中,所設計的復合式變磁力吸附模塊結構,足以產生3 200 N的相對于壁面的吸附力。
5 結論
(1)基于機器人所需壁面吸附條件及越障特性,設計了一種永磁鐵-軛鐵-電磁鐵構成的復合式變磁力吸附模塊并選擇一種交叉式永磁鐵充磁方式,通過這種間歇式排列結構及交叉式充磁方式,以及對永磁鐵磁性材料及電磁鐵的選型,提高了單個吸附模塊的磁能積;通過電磁鐵可以正反向充磁的功能,在機器人越障時,改變每組復合式變磁力吸附模塊的內部磁場,進而可以在機器人越障時提供較高且足夠的壁面吸附力。
(2)通過設定優化函數對復合式變磁力吸附模塊的各項參數進行逐級優化設計,包括:復合式變磁力吸附模塊與壁面間距、復合式變磁力吸附模塊上部軛鐵厚度及磁鐵厚度、復合式變磁力吸附模塊磁鐵間隙軛鐵厚度、磁鐵寬度及間隙數。得到詳細的復合式變磁力吸附模塊模型,以132 mm(長)×212 mm(寬)×39 mm(高)的體積就滿足了機器人越障狀態下單組復合式變磁力吸附模塊所需提供的3 200 N吸附力。
