非線性O(shè)DE-PDE耦合系統(tǒng)邊界控制的局部鎮(zhèn)定①
2022-07-09 07:36:12何翠華王科甯懿楠
西南師范大學(xué)學(xué)報(自然科學(xué)版) 2022年7期
何翠華, 王科, 甯懿楠
成都工業(yè)學(xué)院 大數(shù)據(jù)與人工智能學(xué)院, 成都 611730
耦合的ODE-PDE系統(tǒng)廣泛存在于工程問題中. 近年來, 大量文獻采用 Backstepping 變換方法來解決常微分方程和偏微分方程之間的耦合問題. 為滿足工程需要, 我們利用邊界條件設(shè)計控制律來控制這些耦合的ODE-PDE系統(tǒng)使其穩(wěn)定在平衡狀態(tài). 邊界控制律是由PDE Backstepping 控制發(fā)展而來[1-4].
ODE-PDE耦合系統(tǒng)邊界控制大多是線性的[5-15], 然而非線性現(xiàn)象在應(yīng)用數(shù)學(xué)和物理中廣泛存在. 耦合的線性常微分方程和非線性偏微分方程系統(tǒng)具有豐富的工程應(yīng)用價值, 但由于非線性在數(shù)學(xué)上是極具挑戰(zhàn)性的問題, 故關(guān)于非線性偏微分方程系統(tǒng)鎮(zhèn)定的結(jié)果較少[15-22]. 利用邊界控制來穩(wěn)定非線性O(shè)DE-PDE耦合系統(tǒng)是一個很有意義的研究領(lǐng)域.
本文對非線性O(shè)DE-PDE耦合系統(tǒng)的控制設(shè)計類似于文獻[7], 主要貢獻是基于邊界反饋控制的方法處理一類包含反應(yīng)項是不確定的非線性偏微分方程與線性微分方程的耦合系統(tǒng)的局部指數(shù)穩(wěn)定的問題.
因此, 本文考慮以下非線性耦合系統(tǒng)的邊界控制

(1)
ut(x,t)=uxx(x,t)+f(u(x,t)),x∈(0, 1)
(2)
ux(0,t)=α(u(0,t)-CTX(t))
(3)
u(1,t)=U(t)
(4)
其中: 向量X(t)∈Rn是裝置的一個信號; (A,B)是可控制矩陣對 (A∈Rn×n,B∈Rn) ; 標(biāo)量u(x,t)∈R是裝置的熱量; 在x=0處, 滿足Neumann邊界條件,α是傅里葉常數(shù), 它取決于裝置的材料和導(dǎo)熱性,CTX(t)是溫度裝置(CT∈Rn);U(t)是邊界控制輸入.f(u(x,t))是非線性函數(shù), 對于這個系統(tǒng), 非線性f(u)引用文獻[15]假定條件.
假定1對于系統(tǒng)(2)中的f(u), 存在δ>0和β>1, 使得
f(0)=0
‖f(u)‖≤δ‖u‖β
(5)
其中‖·‖將在后面詳細說明.
假定1中的第一項表示0是系統(tǒng)(1)-(4)在零輸入下的平衡態(tài), 第二項意味著f(u)的增長速度并不比u的冪函數(shù)快.
系統(tǒng)(1)-(4)代表了一類廣泛的耦合非線性O(shè)DE-PDE方程, 本文主要貢獻是基于 Backstepping 變換的邊界控制方法使一類包含不確定反應(yīng)項的非線性偏微分方程與線性微分方程的耦合系統(tǒng)達到局部指數(shù)穩(wěn)定. 對于ODE-PDE耦合系統(tǒng)Backstepping邊界控制律設(shè)計方法是可行的[1,6-7]. 通過引入具有理想穩(wěn)定性的目標(biāo)系統(tǒng), PDE Backstepping 變換將系統(tǒng)轉(zhuǎn)化為由核函數(shù)和向量值函數(shù)耦合的方程. 然后根據(jù)目標(biāo)系統(tǒng)的邊界條件得到控制律. 研究PDE Backstepping 變換解決耦合ODE-PDE的控制系統(tǒng)是很有價值的.
本文令
(6)
(7)
1 控制律
1.1 Backstepping變換
引入以下Backstepping變換
X(t)=X(t)
(8)

(9)
其中k(x,y)與φ(x)是待定的.
將目標(biāo)系統(tǒng)取為

(10)
wt(x,t)=wxx(x,t)+H(w(x,t)),x∈(0, 1)
(11)
wx(0,t)=0
(12)
w(1,t)=0
(13)
其中:

選擇向量KT∈Rn使得 (A+BK)是Herwitz矩陣.

利用(3),(9)式對w(x,t)關(guān)于x和t求導(dǎo)
(14)
再令
k′(x,x)=0
ky(x, 0)-αk(x, 0)+φ(x)B=0
φ″(x)-αk(x, 0)CT-φ(x)A=0
kxx(x,y)-kyy(x,y)=0
(15)
接著控制律被設(shè)計為

(16)
通過邊界條件(13)獲得.
1.2 核方程的解
為了方便, 引用文獻[14]直接給出(15)式的解. 令
其中I是單位矩陣.
Γ(0)=(K, -αCT,KA+α2CT)
核函數(shù)k(x,y)和φ(x)分別為
φ(x)=Γ(0)eDxJ
1.3 逆變換
同樣我們給出逆變換
X(t)=X(t)
(17)
(18)
令

其中I是單位矩陣.
Θ(0)=(K,α(K-CT))
核函數(shù)Ψ(x)和n(x,y)分別為
Ψ(x)=Θ(0)eΩxF

2 穩(wěn)定性
為得到穩(wěn)定性定理, 首先給出幾個引理.
引理1函數(shù)w(x,t)由(6)式定義, (PB)T和X(t)由(7)式定義, 有以下不等式成立
(19)
證現(xiàn)在利用Schwartz’s不等式和Young’s不等式來估計, 可得
接著根據(jù)w(1,t)=0與Agmon’s不等式, 有
然后利用Poincare不等式, 可得
因此, 不等式(19)成立.
引理2根據(jù)變換(9)與逆變換(18), 可得
‖w(x,t)‖2≤(1+s)‖u(t)‖2+‖φ‖2‖X(t)‖
‖u(x,t)‖2≤(1+t)‖w(t)‖2+‖Ψ‖2‖X(t)‖
(20)
其中:
(21)
(22)
證由變換(9), 可以獲得
由Holder’s不等式, 可以得到
其中:
(23)
接著根據(jù)Schwartz’s不等式, 有
其中:
因此
‖w(x,t)‖2≤(1+s)‖u(t)‖2+‖φ‖2‖X(t)‖
同理可估計
‖u(x,t)‖2≤(1+t)‖w(t)‖2+‖Ψ‖2‖X(t)‖
其中t和‖Ψ‖2由(22)式定義, 則(20)式成立.
引理3H(w(x,t))由(11)式定義, 可得
(24)
其中:
(25)
證
我們令
其中:
利用Holder不等式 與Young’s不等式, 可得
其中:
由此可得
同理可估計
其中s來自(23)式.
然后
其中ξ是如(25)式所示的常數(shù).
接下來證明目標(biāo)系統(tǒng)(10)-(13)是局部穩(wěn)定的.
定理1存在一個正常數(shù)γ且任意的初始條件滿足‖X(0),w(0)‖2≤γ, 有下列不等式成立
(26)
其中
(27)
則目標(biāo)系統(tǒng)(10)-(13)在‖·‖2意義下是局部指數(shù)穩(wěn)定的.
證
考慮以下Lyapunov函數(shù)
(28)
其中矩陣P=PT>0滿足
P(A+BK)+(A+BK)TP=-I
(29)
且參數(shù)a>0是待定的.
矩陣P是(29)式的解, 因此
(30)
其中λmin(P)與λmax(P)是矩陣P的最小和最大的特征值.
對(28)式關(guān)于t求導(dǎo), 則
代入(19),(20)和(24)式可以得到
令a=8‖PB‖2+3, 可得
其中ξ由(25)式定義.
(31)
選取‖X(0),w(0)‖2≤γ, 則V(0)≤σγ2, 因此不等式(31)成立. 利用(30)和(31)式, 可以推出
其中μ由(27)式定義, 因此不等式(26)成立. 證畢.
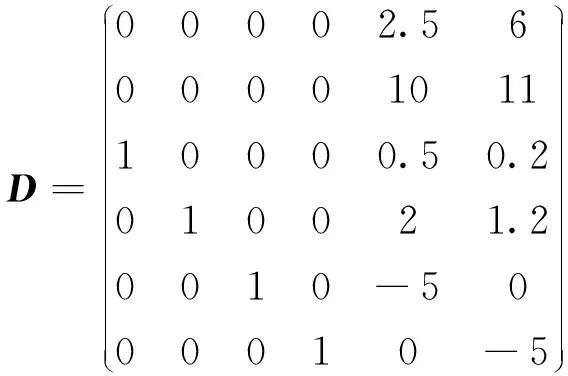
3 仿真設(shè)計
系統(tǒng)(1)-(4)的模擬仿真
其中:
f(u(x,t))=12u2(x,t)
同時

我們令
K=(-0.7, -9.2)
可以驗證矩陣A+BK是Hurwitz矩陣. 因此, 系統(tǒng)滿足(5)式, 容易得到
其中:
Γ(0)=(-0.7, -9.2, 0, -5, -18.75, 13.82)
則控制律為
(32)
仿真結(jié)果見圖1-4. 圖1開環(huán)系統(tǒng)是不穩(wěn)定的. 圖2和圖3顯示在控制(32)輸入下, 閉環(huán)系統(tǒng)的信號在時間趨近于無窮時趨近于零. 圖4顯示控制(32)是有界的.
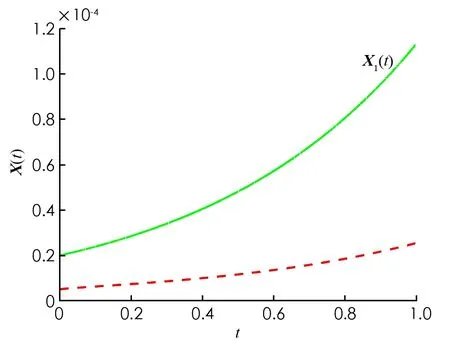
圖1 開環(huán)系統(tǒng)下的X(t)
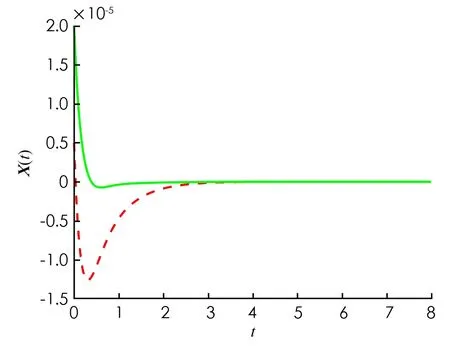
圖2 閉環(huán)系統(tǒng)下的X(t)
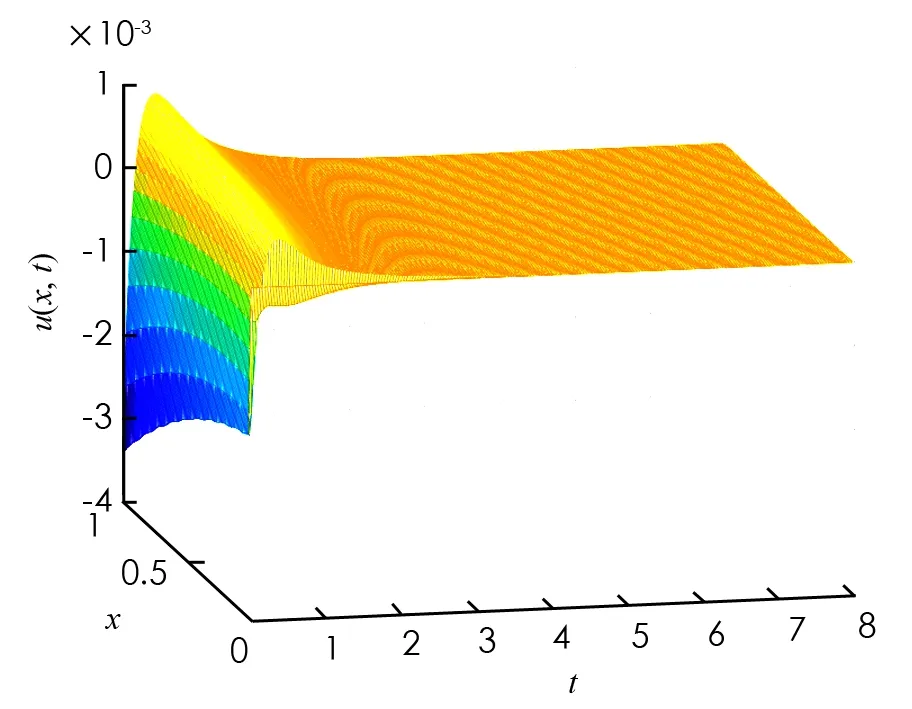
圖3 閉環(huán)系統(tǒng)下的u(x, t)
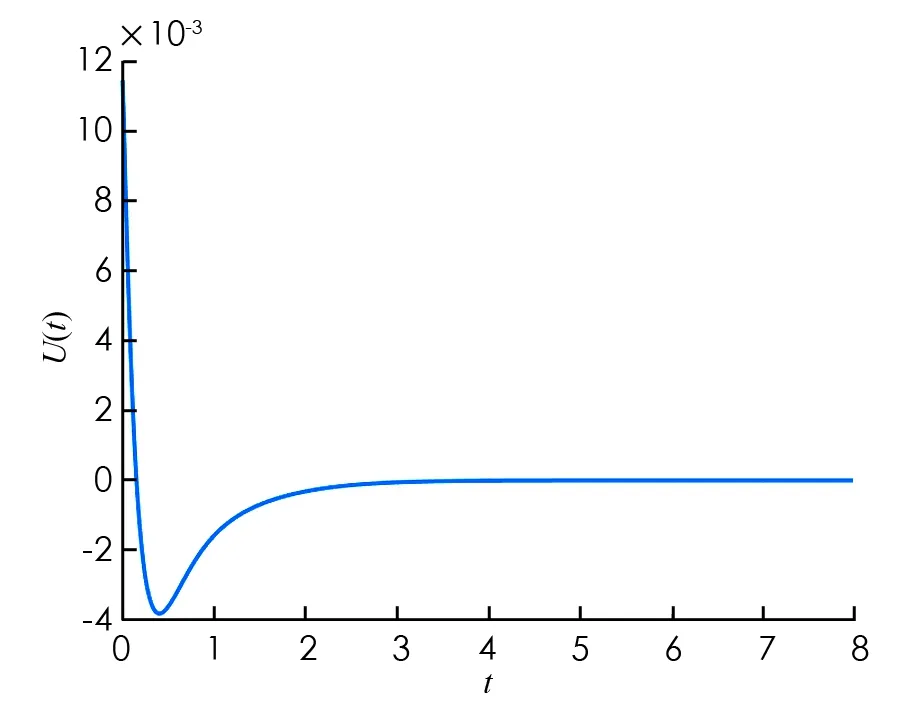
圖4 U(t)的輸入
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2020年6期)2020-07-25 02:31:36
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東青年(2016年1期)2016-02-28 14:25:25
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44
