考慮碰撞安全性的電動客車車身截面尺寸優化
2022-07-09 01:43:06范墊楊秀建卞秀晗張生斌
科學技術與工程 2022年15期
范墊, 楊秀建*, 卞秀晗, 張生斌
(1.昆明理工大學交通工程學院, 昆明 650500; 2.臨沂高新區鴻圖電子有限公司, 臨沂 276000)
由于承載式客車車身具有質量輕、強度和剛度較高的優點,是目前電動客車車身骨架設計的前沿方向[1],同時,新能源電動客車對充電行駛里程的需求越來越高,電動客車車身的輕量化設計也備受關注[2]。另一方面,由于大多數城市電動客車并沒有配備專門的防撞體系結構,使得電動客車在碰撞安全性上存在隱患,因此,電動客車設計中的乘員安全問題也備受關注[3]。
傳統的乘用車碰撞安全性研究中,研究者通常在原有結構上增加構件數量或者增加構件的厚度尺寸來提高碰撞安全性能[4-6],而采用截面尺寸優化相比傳統單一的厚度尺寸優化,涉及的設計變量更豐富,優化效果更好,是比單一的厚度尺寸優化更科學的優化方法。在防撞結構的截面尺寸優化研究中,Khalkhali等[7]將改進的粒子群優化算法和NSGA-II方法用于研究穿孔方管的耐撞性和輕量化性能,得到了能量吸收性能優異且輕量化效果較好的方管結構形狀;Yin等[8]對蜂窩填充多邊形管進行了多目標遺傳算法優化,獲得了具有優異能量吸收性能的多邊形管結構。在客車車身結構截面尺寸優化研究方面,左文杰等[9]對車身矩形管梁結構進行了截面特性計算,建立了優化數學模型,并求解得到了車身管梁結構的最優截面尺寸;丁煒琦等[10]結合靜模態以及疲勞壽命的約束要求,對客車車身管梁結構進行截面尺寸優化,成功提高了車身各項性能并降低了整車質量。
隨著有限元網格變形技術的成熟,許多研究人員將網格變形技術引入車輛結構的優化設計中,網格變形技術可用于構造結構優化中的形狀設計變量,將形狀尺寸參數加入截面尺寸優化中以提高優化效果,王圓等[11]將網格變形技術應用到白車身汽車模型的改造設計中,縮短了開發時間和成本;方劍光等[12]將網格變形技術用于轎車白車身關鍵結構的截面尺寸優化中,得到了各項性能優異的白車身結構。
熵權法和優劣解距離法(technique for order preference by similarity to an ideal solution, TOPSIS)也常結合于汽車結構優化的研究中,結合該方法可以計算每個設計變量對目標響應的綜合貢獻度,或對優化最優解的貼合度進行排序[13],以提高優化研究的效率,大大減少CAE(computer aided engineering)研究學者的仿真優化計算量。Wang等[14]使用改進的粒子群優化算法和TOPSIS方法對小車側面碰撞性能進行研究,在滿足各項指標的要求下提高了小車B柱的耐撞性和輕量化性能。同時,代理模型方法在耐撞性的研究中也使用比較廣泛,使用代理模型建立變量與目標響應之間的數學關系或響應面模型,將有限元法轉變為數值求解法尋找最優解,是一種精度高、效率高的一種輔助研究方法,在耐撞性的研究中不可或缺[15-16]。
目前客車車身管梁結構的截面尺寸優化大多運用在靜模態模型中,在碰撞安全性的優化研究上運用較少,現針對缺乏防撞體系結構的承載式電動客車,考慮到其碰撞安全性較差的情況,在不影響整車結構強度和剛度的前提下,對客車前端管梁結構進行截面尺寸優化,以方向盤中心點最大侵入量和優化區域結構總質量最低為多目標,結合貢獻度分析、熵權法、TOPSIS法、拉丁超立方實驗設計、響應面法、多目標遺傳算法等對客車碰撞安全性和輕量化性能進行研究。
1 客車有限元模型的建立與驗證
1.1 正面碰撞模型的建立與分析
參照《汽車正面碰撞的乘員保護》(GB 11551—2014)中的汽車正面碰撞試驗要求,本文建立了客車整備質量下50 km/h的正面100%剛性碰撞有限元模型。在模型建立時對碰撞結果影響不大的結構進行了簡化,簡化后的模型包括底盤、車身骨架、蒙皮、駕駛員座椅、方向盤等結構,忽略了車上的電器、玻璃及裝飾品等設備,整體簡化遵循有限元模型簡化原則,簡化后的客車碰撞有限元模型如圖1所示。
碰撞分析完成后的能量變化曲線如圖2所示,能量變化曲線結果遵守能量守恒定律,有限元模型碰撞完成后質量增加0.708 kg,模型總質量為3 065.675 kg,質量增加占比0.023%,模型滿足有限元碰撞分析標準。
在LS-Dyna軟件中對碰撞有限元模型進行計算仿真,得到了該電動客車正面碰撞后整體和局部的變形,如圖3所示,從分析結果可以看到,客車前部駕駛艙變形嚴重,方向盤侵入量較大,駕駛員胸部和腿部生存空間極其有限。由于目前各國還沒有形成正式的大客車正面碰撞安全的評價標準,故以《客車車內尺寸》(GB/T 13053—2008)中推薦的駕駛區部分尺寸為依據,對碰撞后的客車駕駛區相關尺寸進行提升改進,增大碰撞后駕駛員生存空間的大小,以提高客車的正面碰撞安全性。

圖1 客車正面碰撞有限元模型Fig.1 Finite element model of frontal collision of passenger car

圖2 能量變化曲線Fig.2 Energy change curve

圖3 客車碰撞仿真變形Fig.3 Frontal collision deformation of passenger car
1.2 選取優化區域
客車正面碰撞過程中,前端結構為主要的吸能區,還有很大部分未吸收完的能量沿著車架傳遞到后邊的堅固區和后端吸能區,優化時需要讓吸能區和堅固區的剛度更大,以保證駕駛員生存空間盡可能的充裕,所以主要選取吸能區和堅固區內的組件進行優化設計。在優化區域選取時按管梁結構的截面尺寸對優化區域內的組件進行分組,然后根據各組件吸能量的結果,選取吸能量占比較大的組件作為最終的優化目標。表1顯示了選取的各組件吸能量的統計及占比。
根據各組件吸能結果,最終共選取了7組不同截面尺寸的矩形管梁組件作為優化區域,共包含61根管梁結構,如圖4所示,選取出來的管梁結構包含了客車前端區域的大部分結構,包括了吸能區和堅固區的大部分組件,以及個別后吸能區中形變較大的組件。

表1 選取為優化組件的吸能量統計Table 1 Statistics of energy absorption selected as optimized components

圖4 優化區域Fig.4 Optimized area
1.3 建立碰撞安全性優化響應
考慮到客車正面碰撞仿真結果中,駕駛艙各區域結構嚴重變形,駕駛員生存空間極其有限,參照《商用車駕駛室乘員保護》(GB 26512—2021),駕駛室的設計在正面碰撞中應盡可能消除駕駛室乘員的危險的要求,優化目的主要為提高碰撞后駕駛員生存空間的大小,減小測量點的峰值侵入速度,以及增大客車前部吸能區的吸能量。
在測量點選取時主要從保證駕駛員生存空間的角度考慮,圍繞駕駛員座艙位置選取了方向盤中心位置、駕駛員最前部、駕駛員座椅底部和駕駛艙尾部4個位置作為測量點,建立了7個優化響應:駕駛艙前部測量點侵入量I1、駕駛艙座椅底部測量點侵入量I2、駕駛艙尾部測量點侵入量I3、方向盤中心侵入量I4、駕駛艙座椅底部測量點的侵入速度V、吸能區總吸能量E和優化區域總質量M,各測量點具體位置如圖5所示。
碰撞分析完成后,選取的駕駛艙各測量點的侵入量曲線如圖6所示,駕駛艙前部測量點侵入量I1最大值為476 mm,駕駛艙座椅底部測量點侵入量I2最大值為256 mm,駕駛艙尾部測量點侵入量I3最大值為262 mm,方向盤中心位置侵入量I4最大值為544 mm。
針對本文電動客車模型,其前端并沒有安裝專門的防撞體系結構,當發生碰撞時主要由前端吸能區和堅固區的結構對碰撞產生的能量進行吸收,因此加入了客車前端吸能區結構的吸能量作為優化響應,優化目標為增大該部分結構的吸能量,以減小碰撞時對后端結構的沖擊。本文電動客車模型碰撞后吸能區的能量吸收曲線如圖7所示,吸能區結構的能量吸收曲線在77 ms時達到最大值98 671 J。
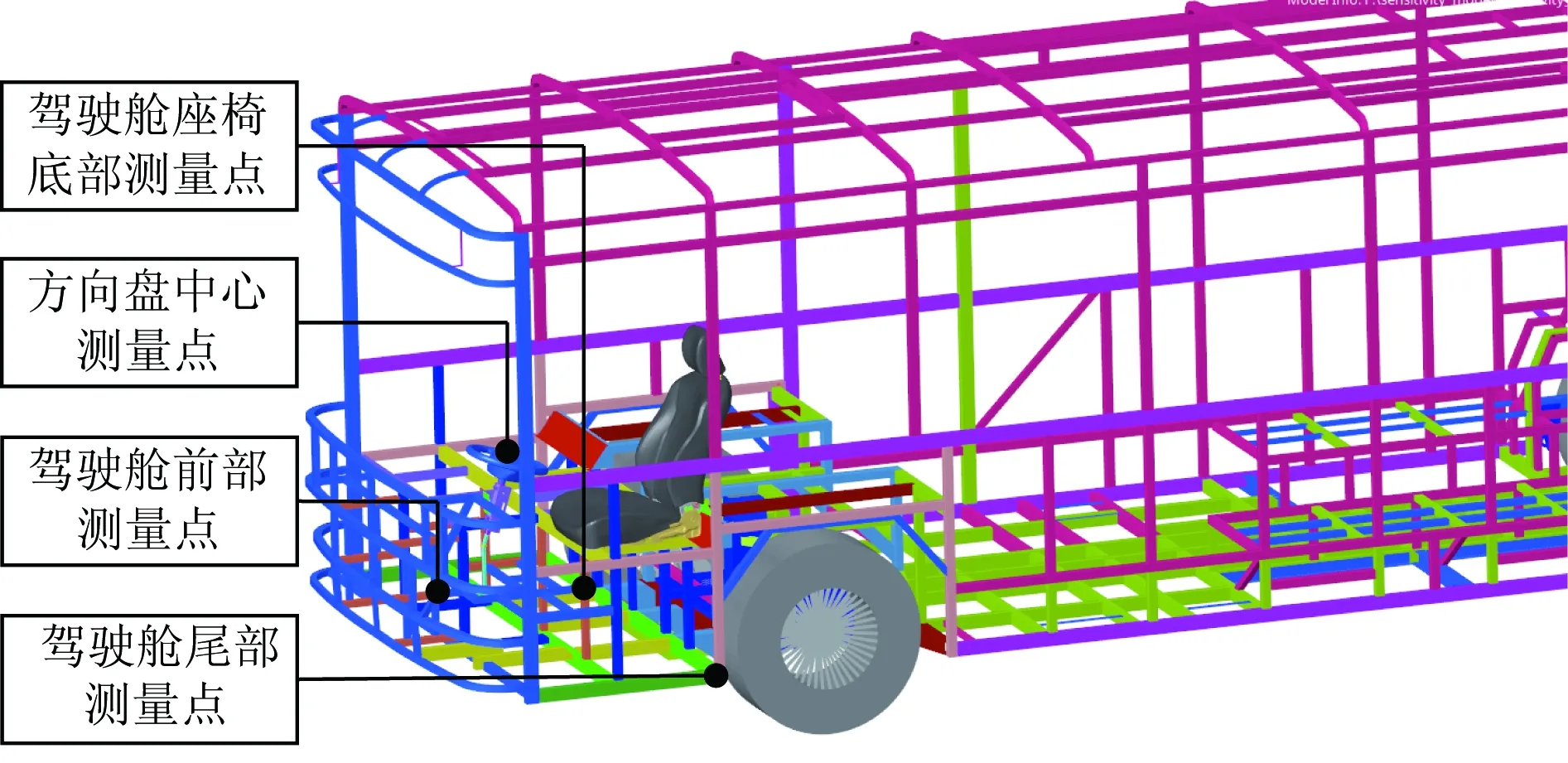
圖5 客車正面碰撞測量點Fig.5 The measuring point of the frontal collision of the passenger car
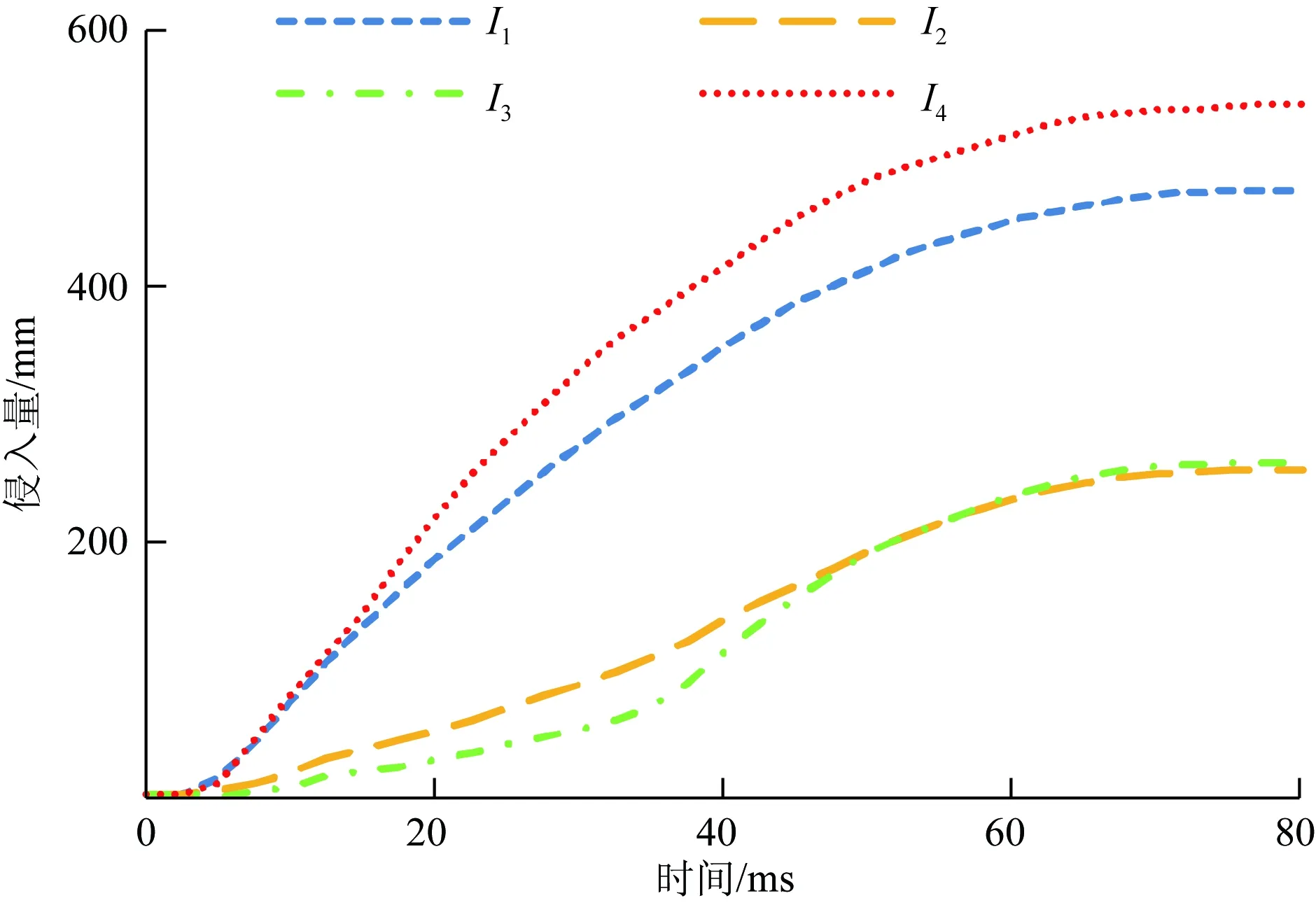
圖6 選取點侵入量曲線Fig.6 Selected point invasion curve
侵入速度也是評價碰撞安全性能的重要指標,選取駕駛艙底部某點進行了侵入速度的分析,碰撞過程中客車駕駛艙底部測量點的侵入速度曲線如圖8所示,侵入速度峰值在38 mm時達到最大值7.25 m/s,同時將侵入速度峰值作為響應目標進行優化。

圖7 吸能量曲線Fig.7 Energy absorption curve

圖8 侵入速度曲線Fig.8 Intrusion velocity curve
2 建立設計變量及其綜合貢獻度分析
2.1 設計變量參數化建模
基于HyperMesh軟件中的shape功能,對選取出來的管梁組件進行形狀設計變量參數化建模,對于矩形管梁和C形管梁結構的截面尺寸,設計變量參數都為高度h、寬度b和厚度t,在有限元軟件中分別對同尺寸的中性面殼單元網格進行拉伸和壓縮操作,以建立參數化的形狀設計變量,各管梁結構截面尺寸的具體參數如圖9所示。
考慮到形變過大會導致客車前端結構與客車后端結構的焊接配合問題,在參數化建模時對各管梁結構的中性面網格按寬度和高度分別進行了10 mm的拉伸和壓縮操作,厚度變量的上下限分別為初始值的50%,共建立了8個厚度設計變量和14個形狀設計變量,參數化建模完成后的各組件的截面尺寸變化范圍如表2所示。
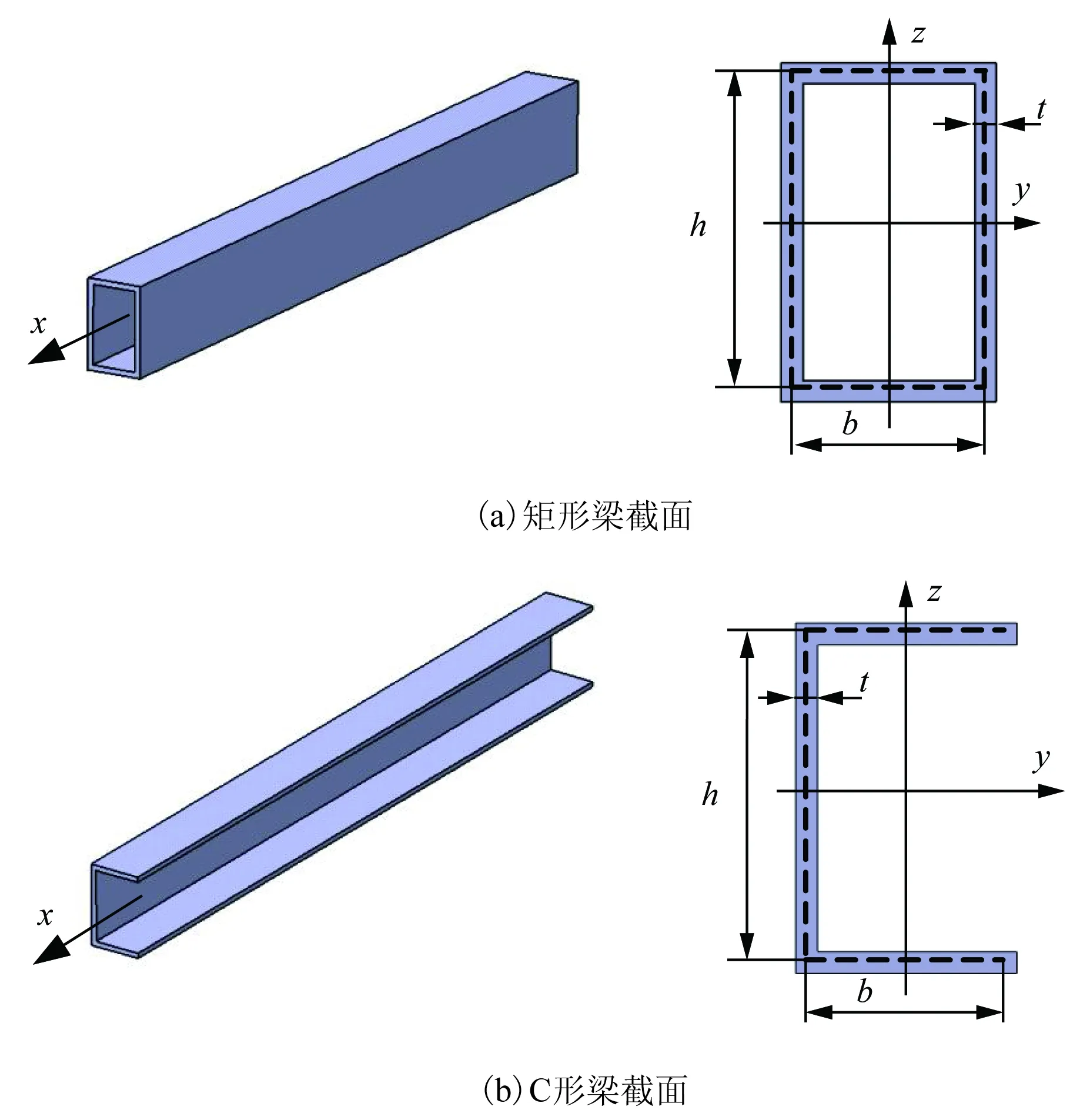
圖9 梁截面局部坐標系Fig.9 The local coordinate system of beam section
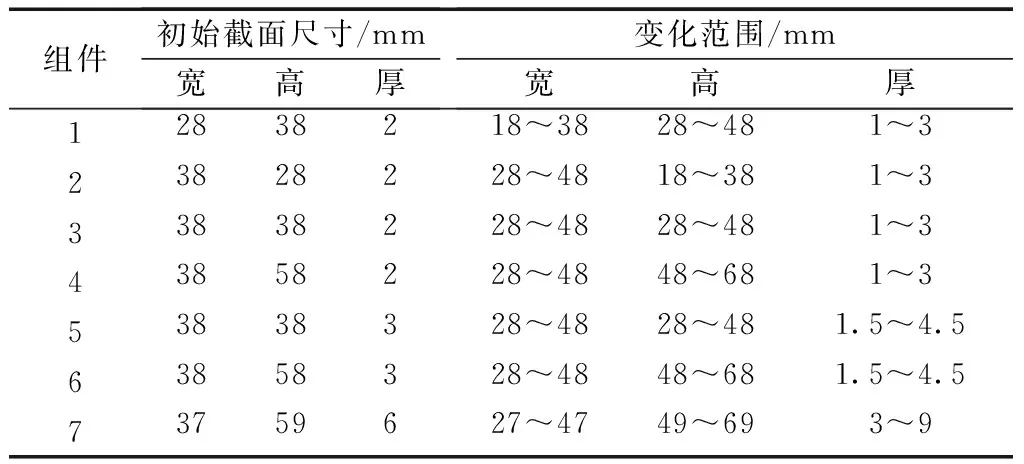
表2 組件的初始截面尺寸及優化取值范圍Table 2 The initial cross-sectional dimensions of the components and the optimized value range
2.2 設計變量綜合貢獻度系數計算
針對有限元碰撞分析耗費時間長、效率低等問題,引入熵權和TOPSIS綜合貢獻度計算方法對設計變量進行綜合貢獻度計算,并選取綜合貢獻度較高的設計變量作為最終的優化對象。進行綜合貢獻度計算前需要對設計變量對響應的靈敏度進行分析,在靈敏度分析時采用拉丁超立方的方法進行了50組試驗設計,再通過靈敏度分析得到的靈敏值計算出設計變量對不同響應的貢獻度值,如圖10所示。
采用熵權法和TOPSIS方法對設計變量進行綜合評價,將設計變量對響應指標的貢獻度定義為TOPSIS方法的決策矩陣,即
(1)
式(1)中:xij為第i個設計變量對第j個性能指標的貢獻度(i=1,2,…,m,j=1,2,…,n);m為設計變量的個數;n為響應指標數量。
對決策矩陣正則化處理,得到正則化結果rij為
(2)
對第j項響應指標,第i個設計變量的特征比重為
(3)
計算第j項響應指標的熵值ej為

(4)
利用熵權法得到的各項性能指標的權重系數wj可表示為

(5)
構建決策矩陣vij為
vij=wijrij
(6)
圖10 設計變量貢獻度Fig.10 The contribution of design variable
在TOPSIS方法中,針對望大和望小型響應指標,其正理想解Z+和負理想解Z-定義為

(7)

(8)
第i(i=1,2,…,n)個設計變量與正理想解和負理想解之間的距離采用歐式距離計算,表達式為

(9)
(10)
各設計變量與正理想解的貼近度η計算式為

(11)
η越大,次設計變量對響應指標的影響程度越大,故將貼近度η定義為評價各設計變量對性能指標的綜合貢獻度系數。
從表3可以得到各設計變量對目標相應的綜合貢獻度值以及各設計變量的綜合貢獻度排序,考慮到優化效果以及時間效率問題,最終選取排名前15的設計變量作為最終的優化設計變量。

表3 綜合貢獻度計算結果Table 3 Calculation results of comprehensive contribution
3 多目標優化
3.1 響應面擬合
響應面法(response surface methodology,RSM)是近似模型方法的一種,目的是構造一個多項式函數來表達變量與響應間的函數關系,在對接觸、碰撞等非線性問題進行優化設計時,采用響應面法是非常有效的,針對本文中客車正面碰撞安全性研究,采用二階多項式來構建響應面模型。常用的二階多項式響應面函數表達式為
(12)
式(12)中:X1,X2,…,Xj,為設計變量;a0、ai、aii、aij為待定系數;n為設計變量的個數;ξ為觀測誤差和噪聲;Y為響應面擬合函數。
建立響應面擬合后的代理模型,需要對其進行精度評估,在其精度滿足要求后才能進行下一步的數學模型優化,針對本文中建立的7個響應面模型,包含了4個位置的侵入量、侵入速度、吸能區吸能量和優化區域總質量,其預測值與仿真值的散點圖如圖11所示,其預測值與仿真值的散點圖大致都在45°對角線上,表明其精度在可靠的范圍內。
針對擬合函數的決定系數R2的計算公式為
(13)

R2越接近于1,說明近似模型的精度越高,各近似模型的誤差檢測結果如表4所示,所構建的7個近似模型的決定性系數均大于0.9,滿足工程分析的需要。

表4 代理模型的精度R2Table 4 Accuracy R2 of the surrogate model
3.2 多目標遺傳算法優化
優化方法選取多目標遺傳算法進行多目標優化,考慮到此研究客車模型在正面碰撞中駕駛員胸部生存空間太小,以及輕量化的優化目標,優化選取方向盤最大侵入量I4最小和優化區域總質量M最小作為目標,其他響應作為約束,針對本文研究的多目標遺傳算法優化數學模型表示為
圖11 響應面模型散點圖Fig.11 Response surface model scatter plot

(14)
基于HyperStudy優化設計平臺,采用多目標遺傳算法對目標進行優化,得到關于方向盤侵入量和設計區域總質量的Pareto前沿,如圖12所示。
結合Pareto圖,綜合權衡駕駛員處方向盤最大侵入量和設計區域總質量妥協解的取值空間,選取駕駛員處方向盤中心點侵入量I4=508 mm,設計區域總質量M=215.66 kg的點為最終的優化解,求解完成后各設計變量及優化響應的優化值如表5和表6所示,其中設計變量的值為相應管梁結構殼單元中性面的尺寸值,由多目標遺傳算法的優化結果可以看到,優化后各項性能的提升效果都比較明顯。

圖12 Pareto前沿Fig.12 Pareto frontier

表5 優化后設計變量尺寸Table 5 Design variable size after optimization

表6 優化后響應值Table 6 Response values after optimization
4 優化后正面碰撞安全性對比
4.1 駕駛室變形結果對比
優化前后的客車整體和前端駕駛室變形結果對比如圖13和圖14所示,由優化結果可以看到,優化后的客車前端結構的完整度明顯更高,同時方向盤侵入量顯著降低,駕駛員下方的矩形管梁構件變形明顯變小,客車前部結構的強度得到有效提升。
碰撞后駕駛艙各測量點的侵入量結果對比如圖15所示,駕駛艙前部測量點侵入量I1最大值從476 mm降低為387 mm,駕駛艙座椅底部測量點最大侵入量I2最大值從256 mm降低為231 mm,駕駛艙尾部測量點最大侵入量I3最大值從262 mm降低為211 mm,碰撞完成后方向盤中心位置侵入量I4最大值從544 mm降低為510 mm,優化后的4個測量點的侵入量都顯著降低,駕駛員生存空間提升效果明顯。

圖13 優化前后整車碰撞變形對比Fig.13 Comparison of bus collision deformation before and after optimization

圖14 優化前后前部結構碰撞變形對比Fig.14 Comparison of front structure collision deformation before and after optimization
圖15 優化前后測量點侵入量對比Fig.15 The intrusion of measurement points before and after optimization
4.2 碰撞峰值侵入速度和吸能區吸能量曲線對比
多目標NSGA-Ⅱ優化后的駕駛艙選取點侵入速度和吸能區的能量吸收曲線如圖16和圖17所示,峰值侵入速度由7.25 m/s減小為6.81 m/s,減小了6.1%,客車前端吸能區結構的能量吸收最值由98 671 J增大為106 860 J,增大了8.3%,由仿真結果可見優化效果的實際可行性,客車碰撞安全性提升效果較明顯。

圖16 優化前后吸能區吸能量曲線Fig.16 The energy absorption curve before and after before and after optimization

圖17 優化前后侵入速度曲線Fig.17 The intrusion speed curve before and after optimization
5 結論
(1)通過有限元仿真軟件對某承載式電動客車碰撞后的結果進行了分析和驗證,構建了侵入量、侵入速度、客車前端吸能區結構吸能量和優化區域總質量作為優化響應。
(2)引入了有限元技術中的網格變形技術,針對車身的管梁結構建立了長度和寬度的形狀設計變量,并結合管梁的厚度尺寸一同作為設計變量對管梁結構的截面尺寸進行優化。
(3)針對有限元碰撞分析耗費時間長、效率低等問題,引入熵權法和TOPSIS方法,結合設計變量靈敏度分析、貢獻度分析對設計變量進行了篩選,提高了優化設計效率。
(4)本文中優化目標選取了方向盤最大侵入量和優化區域結構總質量兩者作為多目標進行了NSGA-Ⅱ多目標優化,并對優化后的模型進行了對比,碰撞安全性和輕量化性能都得到有效提升。
(5)后期的研究將從整車性能優化入手,對整車建立形狀優化設計變量,對整車性能進行綜合優化。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24