無極繩絞車運輸控制系統(tǒng)優(yōu)化設計
2022-07-08 01:12:50孫琦崢
機械管理開發(fā) 2022年4期
關鍵詞:設計
孫琦崢
(沁源縣應急管理局, 山西 長治 046500)
引言
隨著煤礦開采業(yè)的不斷發(fā)展,開采作業(yè)環(huán)境日趨復雜,多變坡、大傾角等危險系數(shù)較大的巷道成為煤炭企業(yè)生產的主流巷道,煤炭運輸安全越來越受重視。無極繩絞車所控制的礦車在實際運輸過程中會因軌道的影響而產生顛簸現(xiàn)象,礦車會在垂直方向發(fā)生小幅度位移與碰撞,使得礦車的安全系數(shù)大大降低[1]。
針對上述現(xiàn)象,本文擬通過運用基于位置的阻抗控制原理,通過調整礦車與軌道的實際作用力設計出一套礦車運行系統(tǒng),并依據(jù)礦車系統(tǒng)設計出相應的無極繩絞車運輸控制系統(tǒng),合理控制礦車運行速度,提升無極繩絞車運輸控制系統(tǒng)安全系數(shù)。
1 無極繩運輸?shù)V車設計研究
傳統(tǒng)的無極繩運輸?shù)V車所采用的制動主要來自于無極繩絞車通過卷筒對鋼絲繩長度控制來進行,該制動方法會使礦車在運行時產生垂直方向的位移與碰撞力,影響礦車安全。如果調小運行速度,會影響礦車運輸效率,速度過大,礦車風險性會增大[2]。本文擬運用阻抗控制原理對礦車運行進行優(yōu)化,改善礦車運行狀態(tài)。
阻抗控制分為基于力的阻抗控制和基于位置的阻抗控制兩種方式。由于基于力的阻抗控制對于動力學模型與礦車運行環(huán)境較為敏感,不適用于無極繩運輸系統(tǒng)的實際運行,故本文采用基于位置的阻抗控制系統(tǒng)[3-5]。基于位置的阻抗控制系統(tǒng)是運用位置控制的方法進行內環(huán)控制,將阻抗控制器安裝于位置控制器外實現(xiàn)控制的。在礦車運行時,礦車與軌道之間會產生作用力F,力傳感器會對作用力F 進行實時監(jiān)測,阻抗控制器對位置變化進行實時監(jiān)測,當作用力F 發(fā)生變化時,阻抗控制器會對礦車位置進行相應的調整,從而保證礦車運行的穩(wěn)定。其控制系統(tǒng)結構示意圖如圖1 所示。
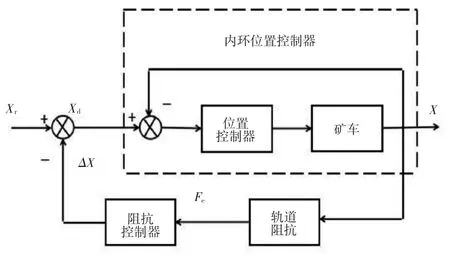
圖1 基于位置的阻抗控制結構示意圖
2 無極繩絞車運輸控制系統(tǒng)設計
2.1 DSP 控制硬件設計
為了實現(xiàn)對改進礦車的有效控制,傳統(tǒng)的無極繩絞車運輸控制系統(tǒng)已無法適應。運輸控制是一個較為復雜的過程,需要通過精密的控制算法來實現(xiàn)。運輸系統(tǒng)控制的主要目的是提升無極繩絞車運輸控制系統(tǒng)的安全性。經綜合分析發(fā)現(xiàn),TI 公司的DSP芯片可作為無極繩絞車運輸控制系統(tǒng)的核心控制元件,符合實際使用要求。
DSP 控制主要是通過力傳感器進行數(shù)據(jù)采樣的,由A/D 進行電路測量采樣,可測量礦車自身重力與礦車、軌道作用力合力值,然后將數(shù)據(jù)傳輸給DSP芯片。通過外置編碼器可測量出兩組數(shù)據(jù),運用平均值法即可算出礦車的平均運行速度,同樣傳輸給芯片。芯片依據(jù)平均運行速度與作用力合力值通過芯片算法即可計算出礦車所需的控制速度,將該數(shù)值輸入事件管理模塊即可通過電機驅動控制礦車運行速度。
2.2 運輸制動控制系統(tǒng)硬件設計
2.2.1 控制流程分析
運輸制動系統(tǒng)主要是通過控制手壓泵調整制動缸的加壓強度,從而控制蝶形彈簧長度來進行制動力大小控制的。運輸系統(tǒng)開始運行后,PLC 會依據(jù)傳感器發(fā)出的脈沖信號進行礦車運行速度運算。當計算結果超出設定運行速度時,PLC 會發(fā)出預警信號,在警示燈亮起的同時啟動電控閥,電控閥將依據(jù)信號對制動缸進行卸壓,當制動缸內的壓力油回流油箱后,蝶形彈簧就會變長,使得礦車閘片可與軌道接觸實現(xiàn)制動效果。其制動流程示意圖如圖2 所示。
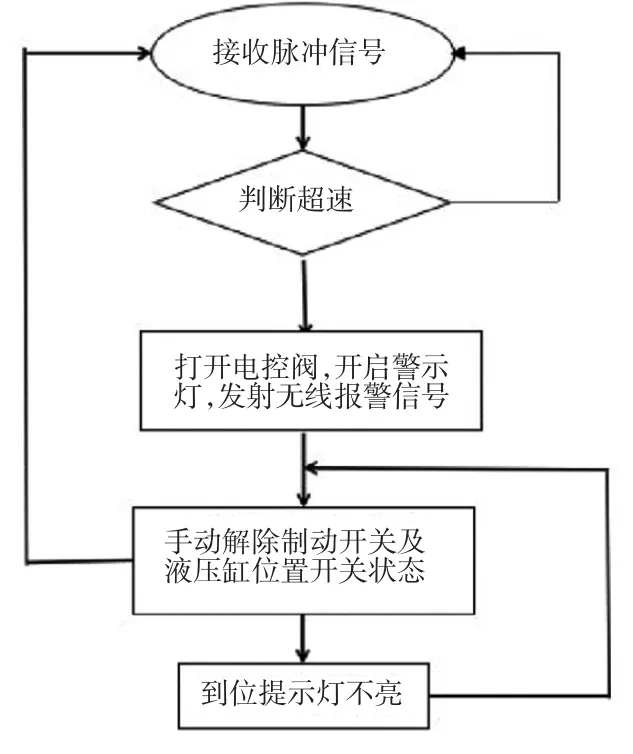
圖2 制動流程示意圖
2.2.2 測速裝置設計
本文的測速裝置主要運用霍爾傳感器進行實時監(jiān)測而實現(xiàn),監(jiān)測的采集點設定在車輪內側。當?shù)V車開始運行后,固定于車輪中間圓盤的磁鐵轉動會對霍爾傳感器實現(xiàn)交替導通,通過后續(xù)信號處理后可得到相應的脈沖信號,從而換算出礦車車輪的實際運行速度。本文擬在車輪上設定8 個均勻分布在圓盤周圍的磁鐵,通過實際測量可知,礦車車輪周長為0.35π,實際運輸制動速度為1.38 m/s,則制動轉速為0.79 r/s,頻率為10.05 Hz。因此,當PLC 所接受的制動頻率達到10.05 Hz 以上,制動系統(tǒng)才進行制動。
2.2.2.1 發(fā)射裝置設計
本文的發(fā)射裝置選取Micrel 公司的MCIRF102發(fā)射器,該發(fā)射器具有幅度鍵控功能,調幅強、抗干擾能力強,同時還有集成度高、外部元件使用少、操作使用簡單等優(yōu)點,是一款高穩(wěn)定性、高性價比的產品。其具體參數(shù)如表1 所示。

表1 MCIRF102 發(fā)射器工作參數(shù)表
依據(jù)發(fā)射器的工作參數(shù)可對振蕩器進行選擇,外置振蕩器頻率計算公式如下:

式中:FT為發(fā)射頻率,MHz;FR為外置振蕩器頻率,MHz。
依據(jù)過往經驗,發(fā)射頻率通常選擇315 MHz,代入式(1)后可得,外置振蕩器頻率為9.843 MHz,外置振蕩器頻率由晶振發(fā)生,其等效串聯(lián)電阻應小于20 Ω。
2.2.2.2 無線接收裝置設計
無線接收裝置選用Micrel 公司的MICRF007 單片接收器,采用QwikRadio TM 技術,無須手工調諧,適用于無線接收。MICRF007 接收的具體工作參數(shù)如表2 所示。
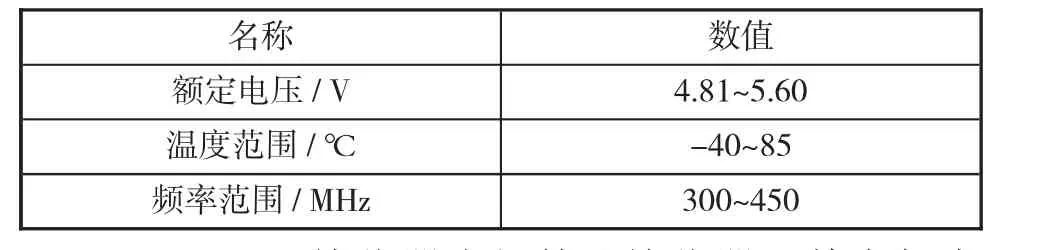
表2 MICRF007 接收器工作參數(shù)表
MICRF007 接收器為超外差接收器,其內部本振頻率與發(fā)射器的發(fā)射頻率的差值應為中頻IF 中心頻率,內部本振頻率的計算公式如下:

式中:FL為內部本振頻率,MHz;FT為發(fā)射器的發(fā)射頻率,MHz。
對于任意發(fā)射器的發(fā)射頻率會存在下邊帶混頻與上邊帶混頻兩個內部本振頻率,當選擇確定的內部本振頻率數(shù)值后,由公式(3)可計算出基準振蕩器頻率:

式中:Ft為基準振蕩器頻率,MHz;FL為內部本振頻率,MHz。
由于接收發(fā)射器的發(fā)射頻率數(shù)值為315 MHz,代入式(2)計算,并通過查詢常用振蕩器頻率表后可以得出,晶振的選擇為4.8970 MHz。
3 系統(tǒng)測試
按上述設計組成無極繩絞車運輸控制系統(tǒng)并進行相應測試后發(fā)現(xiàn),無極繩運輸?shù)V車可依據(jù)運行環(huán)境實時調整礦車與軌道作用力,調整礦車運行速度,保證礦車安全平穩(wěn)運行,并經500 h 測試后無極繩絞車運輸控制系統(tǒng)無任何故障發(fā)生,因此可應用于實際生產之中。
4 結論
隨著煤礦開采業(yè)的不斷發(fā)展,輔助運輸在日常生產中的作用越來越重要。大傾角、多變坡等危險系數(shù)較大巷道的出現(xiàn),使得無極繩絞車運輸系統(tǒng)安全問題越來越嚴重。本文通過對無極繩絞車運輸控制系統(tǒng)進行優(yōu)化設計研究,得出了以下結論:
1)運用阻抗原理設計出無極繩運輸?shù)V車自適應控制方案,礦車可依據(jù)運行環(huán)境實時調整礦車與軌道作用力與速度,保證礦車的平穩(wěn)運行。
2)針對無極繩運輸?shù)V車自適應控制方案設計出相應的無極繩絞車運輸控制系統(tǒng),完美匹配了礦車自適應方案,并對該設計進行了實際測試。經測試,無極繩運輸?shù)V車運行安全平穩(wěn),運行狀態(tài)可實時調節(jié)且500h 內無故障發(fā)生。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04