煤礦用三臂錨桿鉆車研發與應用
2022-07-08 01:11:54楊文斌
機械管理開發 2022年4期
楊文斌
(山西長平煤業有限責任公司, 山西 長治 046000)
引言
根據煤礦有疑必探、有掘必探的要求,探放水作業是當下煤礦安全生產的必要施工工序,傳統的探水設備多采用履帶式深孔鉆車、移動式坑道鉆車或者非自移式探水鉆機,履帶式深孔鉆車、移動式坑道鉆車不僅增加了巷道設備數量、增加了交替錯機風險,而且造價高昂、體積大,配置人員數量多;非自移式探水鉆機功率較小,達不到探放水深度要求,且勞動強度高,需要人工搬運,存在較大的安全隱患。煤礦用三臂錨桿鉆車充分考慮機組功能的多樣化,不僅在機組兩側設有左右錨鉆部,還在機組中部設計有探水鉆機,不僅增加了施工探測孔的功能,拓寬了設備的功能和適用范圍,而且減少了井下設備種類,優化了煤礦井下巷道設備配置[1]。
1 煤礦用三臂錨桿鉆車的組成及工作原理
煤礦用三臂錨桿鉆車屬于煤礦井下支護設備,主要由行走部、機體部、升降部、錨鉆部、鉆孔推進器、前部支撐、探水鉆機、電氣系統、液壓系統等構成,如圖1 所示。巷道掘進時,煤礦用三臂錨桿鉆車與掘進機交替進行探測、掘進、錨護作業,大幅提升了掘進支護效率[2-3]。
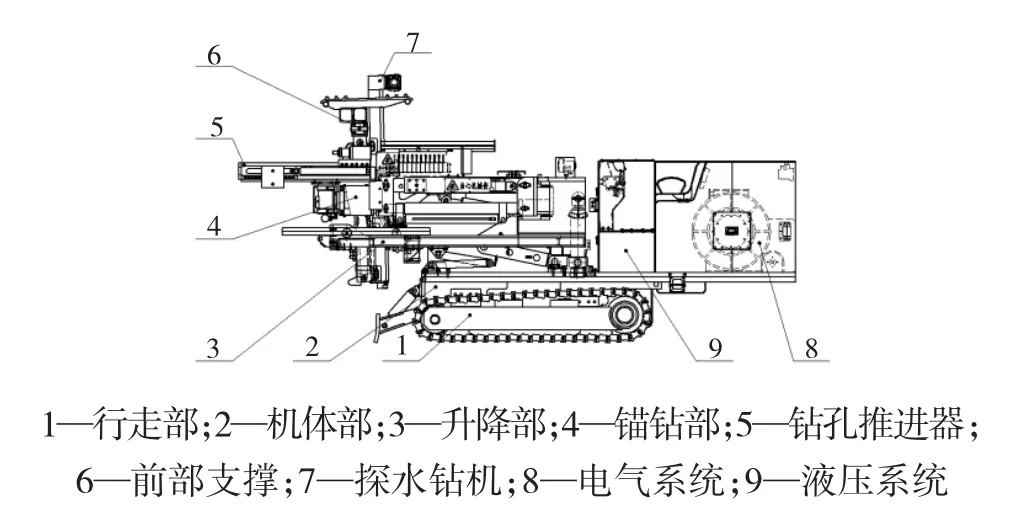
圖1 整機結構
2 主要技術參數
工作范圍(寬×高)為5700 mm×4500 mm;總裝機功率為55 kW;行走方式為履帶式;行走速度為14 m/min;爬坡能力為±16°;鉆臂數量為3 臺;鉆進錨桿、錨索孔直徑分別為22 mm、42 mm;鉆進錨桿、錨索孔深度為20 m;鉆進錨桿、錨索孔用鉆桿規格分別為B19、B22;推進器推進行程為1660 mm;推進器推進速度為5 m/min。
3 關鍵技術研究
三臂錨桿鉆車適用于掘進巷道,可實現探水作業、鉆孔、錨桿及錨索施工等功能,機組機身為窄型設計,方便與掘進機掘錨交替作業。機組共配套3 臺鉆機,機組中部鉆機與前部支撐支護外套筒配合使用,可施工巷道迎頭工作面不同位置探水孔,機身左右兩側各布置1 臺鉆機及鉆臂機構,可施工巷道全方位頂板、側幫錨桿及錨索孔;整機采用整體升降式工作平臺,前部支撐、中部鉆機、鉆臂機構均設置在工作平臺上方,可跟隨工作平臺上下升降,滿足不同高度范圍施工要求,同時機組設有可升降的前部支撐結構,起到臨時支護的作用,有效保證作業人員安全。整機使用大功率電機為機組的液壓系統、機組照明、瓦斯監測等提供動力;液壓系統采用知名品牌的負載敏感柱塞泵,質量可靠,性能穩定[4-5]。
3.1 前部支撐
前部支撐位置設在整體式升降平臺前部中間位置,主要由支護外套筒、支護伸縮油缸、支護內套筒、支護頂梁、支護支撐油缸等組成,支護外套筒在支護支撐油缸的作用下既可以向上撐緊巷道頂板,也可以向前撐緊巷道迎頭工作面,前后角度變化范圍為90°,使巷道頂板支護與工作面迎頭探水作業切換方便。當進行頂板支護時,操縱手柄調整前部支撐動作,使其移至合適的位置撐緊巷道頂板,并將支護頂梁的內套筒向左右伸展出來,滿足大支護面積的使用要求。前部支撐的主要作用是保護操作者的安全,起到臨時支護的目的。基于此,機組進行錨桿、錨索作業時一定要將前部支撐機構升起,支護頂梁展開,防止頂板塌陷。前部支撐結構如圖2 所示。

圖2 前部支撐結構
3.2 探水鉆機
探水作業是當下煤礦安全生產的必要施工工序,本機組將探水鉆機設于前部支撐中間位置,當進行迎頭探水作業時,操縱前部支撐操作閥手柄使前部支撐及探水鉆機處于水平位置,并將支護內套筒向前伸出,支護頂梁左右展開,防止迎頭塌陷,保護作業人員安全。該探水鉆機可實現巖巷、煤巷、半煤巖巷錨桿支護施工中的探水作業,探水動力頭內的大扭矩液壓馬達利用壓力油作為動力源,有效地解決了工作時所需的扭矩與轉速,可根據實際情況調節推進速度和馬達轉速,以保證鉆孔效率;推進油缸采用二級伸縮推進,可以實現較大的工作行程;夾持器具有夾緊與松開鉆桿的功能,快速實現緊固和拆卸鉆桿的目的,方便鉆桿的拆裝與支扶定位;滑動座的圓形滑軌面與滑道的精加工圓鋼面配合,加工成型簡單,保證了鉆孔作業滑動平穩,不卡頓。探水鉆機結構如圖3 所示。

圖3 探水鉆機結構
3.3 左右鉆臂
機組左右鉆臂共兩臺,呈對稱分布,可施工頂板錨桿孔,也可施工角錨桿孔、側幫錨桿孔等,兩臺鉆臂配合作業、互為補充、互不干涉,大幅提升了錨護作業效能。左右鉆臂采用懸臂式結構,左右對稱布置安裝在升降平臺上,主要由鉆孔推進器、擺動油缸Ⅰ、擺動油缸Ⅱ、調整機構、伸縮總成、支撐油缸、回轉座、固定座等組成,鉆臂與鉆孔推進器連接,通過兩者共同配合,完成鉆孔及緊固錨桿錨索動作,實現的動作主要有鉆臂上下升降、臂身向外回轉、鉆臂伸縮總成前后伸縮、推進器左右旋轉、推進器前后旋轉等。鉆臂結構示意圖如圖4 所示。

圖4 鉆臂結構
3.4 升降平臺
機組機體部上方設有整體式升降平臺,主要由后升降油缸、升降平臺、四連桿機構、前穩定機構、前升降油缸、擺動油缸、翻板等組成,前后二級升降油缸伸縮,配合四連桿機構和前穩定機構動作,升降平臺可實現高度方向0~1 m 行程范圍的平穩升降,能較好地滿足操作人員不同高度范圍支護作業的要求;同時升降平臺兩側翻板在擺動油缸的作用下可左右展開,寬度可達3.1 m,翻板上表面采用防滑結構設計,保證了人員的站位安全及站位面積需求。升降平臺結構如圖5 所示。
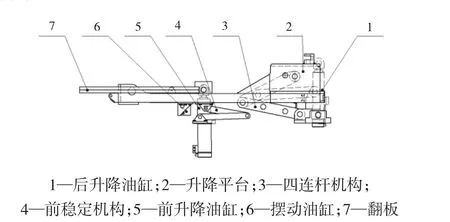
圖5 升降平臺結構
3.5 電氣系統
機組電氣系統主要由真空電磁起動器、三相異步電動機、LED 照明燈、急停按鈕、隔爆電鈴、甲烷斷電儀及各電纜組成,電氣系統通過真空電磁起動器控制油泵電機的起停,整機具有安全可靠回路保護功能。
3.6 液壓系統
機組液壓系統是由泵站、油箱、操縱臺、液壓油缸、擺動馬達、閥組及相互聯接的管路組成。整機的泵站是由一臺55 kW 三相異步電動機,驅動一臺負載敏感柱塞泵,經比例換向閥,將壓力油分別推送給各執行機構,來完成各部件的動作。液壓系統主要實現以下功能:
1)驅動行走馬達運轉,帶動機組實現行走;
2)實現鉆臂部的升降、伸縮及鉆孔推進器的各種動作;
3)實現升降平臺、前部支撐的升降;
4)實現探水鉆機各種動作,提供施工鉆孔時所需的動力。
4 煤礦用三臂錨桿鉆車特性介紹
煤礦用三臂錨桿鉆車適用于掘進工作面探、鉆、錨施工作業,解決傳統探放水設備種類多、配置人員多、施工效率低、作業不安全的現實難題。機組中部機載式大扭矩探水裝置可實現巷道迎頭斷面探放水孔機械化施工,解決探放水效率低和錯機輔助時間長的問題;左右鉆臂相互獨立,互不影響,可互相協調配合、平行作業,提升錨鉆效能,節省大量輔助時間。前部支撐主要作用是機械托網及保護作業人員在空頂下的安全,起到臨時支護的作用。
該機具有如下顯著優點:大扭矩探水鉆機可進行迎頭探水孔、炮眼孔、瓦斯孔等施工作業,探水施工與錨桿孔施工相互獨立,互不影響,最大鉆孔深度可達120 m;機組左右鉆臂可平行作業,滿足巷道全斷面錨桿、錨索施工工藝要求,可大大縮短支護時間,提升支護效率;機組采用可伸縮機載式前部支撐,支護效果更好,可改善工人作業環境的安全性;機組采用整體式升降平臺,配合四連桿與前穩定機構動作,升降平穩,方便作業人員根據不同的巷道高度對平臺進行調整,適應面廣;平臺左右兩側分別配套可展開的翻板,有效增加作業人員站位面積。
5 實際應用效果分析
本煤礦用三臂錨桿鉆車與掘進機配合作業,工作時,首先煤礦用三臂錨桿鉆車進行掘前探測孔施工,探測孔施工完畢后進行掘、錨交替循環作業,掘、錨循環交替作業具體流程如下:掘進機行至工作面割煤,切割成巷,割煤一定距離后,掘進機后退至錨桿鉆車后方靠幫停機,緊接著,煤礦用三臂錨桿鉆車移至工作面對巷道頂幫進行全斷面錨桿、錨索支護,支護完畢后,鉆車退至掘進機后方靠幫,如此循環作業,完成巷道快速掘進;煤礦用三臂錨桿鉆車自2021 年11 月開始進行井下工業性試驗,巷道寬度為5.6 m、高度為4.5 m,頂錨桿每排6 根,排距1 m,幫錨桿左右各4 根,錨桿長度為2.4 m,錨索工藝為2-1-2 布置形式,錨索長度為8.3 m,每班3 人工作支護,單班最高日進尺達到7 m,最高月進尺達到210 m,日均進尺由原來的5 m 提升至7 m(每月按30 d 算),掘進速度大幅提高。同時,對鉆車進行了探水功能試驗,探水鉆機在迎頭工作面進行探水孔施工,每次探水打5 個眼,使用鉆桿的直徑為42 mm、長度為800 mm,鉆頭直徑為65 mm,探水鉆孔施工鉆進100 根鉆桿,共鉆進距離80 m,每個探水眼約施工5 h,共用時25 h,可滿足掘前探測施工要求。
5 結語
本煤礦用三臂錨桿鉆車屬于掘進后配套裝備,與掘進機配合使用,適用于礦山巷道掘進工作面的支護機械化作業。本鉆車鉆進功能全面,機組靈活可靠,既可進行探水鉆孔作業,也可施工全斷面錨桿錨索孔,三個鉆機可隨升降平臺上下升降,滿足不同高度范圍機械化施工要求,實現了一機多用、多功能集成,減少了設備數量,有效提升了礦井生產的單進水平,降低了操作人員的勞動強度,達到減人增效的目的,為國內煤礦快掘快支系統的研究提供了強有力的技術支持。
猜你喜歡
山東冶金(2022年1期)2022-04-19 13:40:52
建材發展導向(2021年9期)2021-07-16 07:11:36
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
山東冶金(2019年1期)2019-03-30 01:34:56
故事大王(2016年7期)2016-09-22 17:30:08
中國房地產業(2016年2期)2016-03-01 01:25:48
工程建設與設計(2016年4期)2016-02-27 10:51:09
河南電力(2016年5期)2016-02-06 02:11:34
西安建筑科技大學學報(自然科學版)(2014年2期)2014-11-12 13:04:54
河南科技(2014年24期)2014-02-27 14:19:30