氣動平衡移載機械手的設計與校核分析
2022-07-08 01:11:52劉晨敏
機械管理開發 2022年4期
劉晨敏
(重慶財經學院物流工程學院, 重慶 401320)
引言
移載機械手作為一種智能輔助設備,具有結構簡單、省時省力的特點,已廣泛應用于現代工業的各個領域,如物料的轉移、搬運、定位、裝配等場合[1]。本文涉及的中大口徑長軸類圓柱型產品,具有口徑較大、長度較長、質量較重等特點,其在裝配完成后的長度約為1.6 m,質量在50 kg 以上,如果全由人力來進行裝卸和運輸,則工人的勞動強度將非常大,同時勞動效率也比較低下。因此,本文針對產品特點設計了一種專用的氣動平衡移載機械手,主要用于產品的裝配、檢測和包裝過程的搬運,工人只需使用較小的推力或拉力就可以輕松實現產品的自由移載,采用的全氣動控制系統也簡化了設備的控制方式,便于人員操作。
1 機械結構設計
本文所述的氣動平衡移載機械手包括機械部分和控制部分,機械部分包括機械臂及夾具,機械臂的旋轉半徑不小于3 m,垂直升降高度不小于1 m,夾具可滿足質量50 kg 產品的自由移載。
1.1 機械臂設計
機械臂的機構簡圖如圖1 所示,主要包括立柱、上臂、懸臂1、懸臂2 和扶手。立柱與上臂、懸臂1 與懸臂2、懸臂2 與扶手分別通過轉動關節連接,所設置的3 個轉動關節可保證機械臂在水平360°范圍內夾取任意形態擺放的產品。上臂與懸臂1 通過移動關節連接,移動關節伸縮所提供的俯仰功能可使機械臂達到高度范圍內的任一位置。
依據圖1 機構簡圖,本文繪制的機械臂模型如圖2 所示。移動關節由一根大口徑的平衡氣缸來驅動,通過氣缸缸桿的伸出與縮回來實現垂直方向的俯仰動作。3 個轉動關節由空壓蝶式制動器來實現,自由狀態下空壓蝶式制動器充氣處于制動狀態,當需要旋轉機械臂時,按下對應的開關按鈕,空壓蝶式制動器泄氣解除制動,工人只需使用較小的力就可自由轉動機械臂,到達預定位置后再松開按鈕,機械臂保持制動狀態不變。
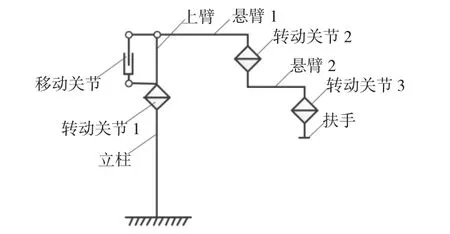
圖1 機械臂機構簡圖
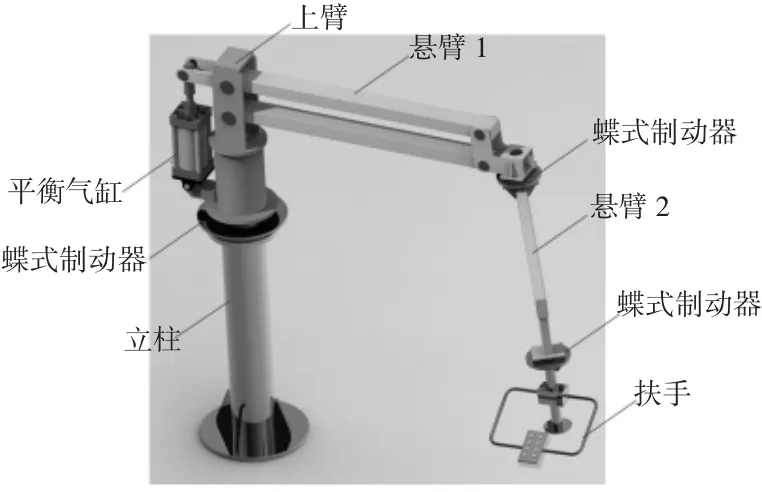
圖2 機械臂模型
1.2 夾具設計
夾具的機構簡圖如下頁圖3 所示,依據雙滑塊機構的衍生型式[2-3],滑塊1 為動力元件,滑塊2-1、滑塊2-2 為執行元件,在兩根連桿的作用下,可保證滑塊2-1、2-2 同步動作。依據此原理,本文設計的夾具模型如下頁圖4 所示。
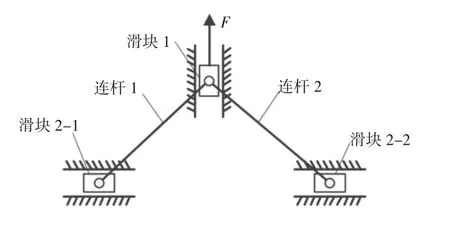
圖3 夾具機構簡圖
由圖4 可知,移動橫桿在抱緊氣缸驅動下做上下移動,實現滑塊1 的功能,平移抱爪在卡槽限制下僅能實現平行移動,實現滑塊2-1、滑塊2-2 的功能,兩連接塊一端同時連接移動橫桿,另一端分別連接兩平移抱爪,實現連桿1、連桿2 的功能。本套夾具的工作過程是:抱緊氣缸缸桿縮回,帶動移動橫桿向上移動,與之連接的連接塊做平面運動,從而拉動平移抱爪相向平移閉合將產品抱緊;需要卸下產品時,抱緊氣缸缸桿伸出,帶動移動橫桿下移,平移抱爪在連接塊作用下背向平移張開,從而將產品放下。本文依據產品長度較長的特點,設計的夾具采用雙抱爪,一前一后分別抱住產品的首部和尾部,以確保夾取的穩定性。
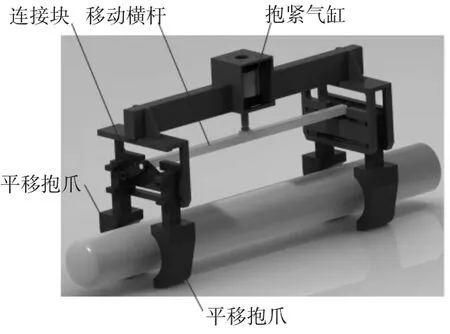
圖4 夾具模型
綜合上述機械臂及夾具的設計,本文繪制的氣動平衡移載機械手模型如圖5 所示,將立柱固定于地面上,該機械手可實現旋轉、起降產品的功能,并可在任意位置實現制動懸停,整個過程操作輕便、轉動自如。

圖5 氣動平衡移載機械手模型
2 氣控系統設計
移載機械手氣控系統工作原理如圖6 所示,其載荷平衡可分為空載平衡和負載平衡兩種類型。空載平衡的控制原理為[4]:當抱緊氣缸空載時,高壓空氣經由調壓過濾器,一路通向空載調壓閥,調壓后經梭閥控制精密調壓閥的輸出壓力。梭閥是邏輯或門,其輸出總是取輸入的最大值。適當調節空載調壓閥的輸出,使得精密調壓閥輸出的氣壓控制平衡氣缸達到空載平衡。負載平衡的控制原理為[4]:當抱緊氣缸負載時,撥動載荷轉換開關,負載調壓閥回路貫通,使得高壓空氣調壓后進入梭閥,當負載調壓閥輸出到梭閥的壓力大于空載調壓閥輸出到梭閥的壓力時,梭閥輸出為負載調壓閥所確定的壓力,這個壓力控制精密調壓閥,進而控制平衡氣缸達到負載平衡。
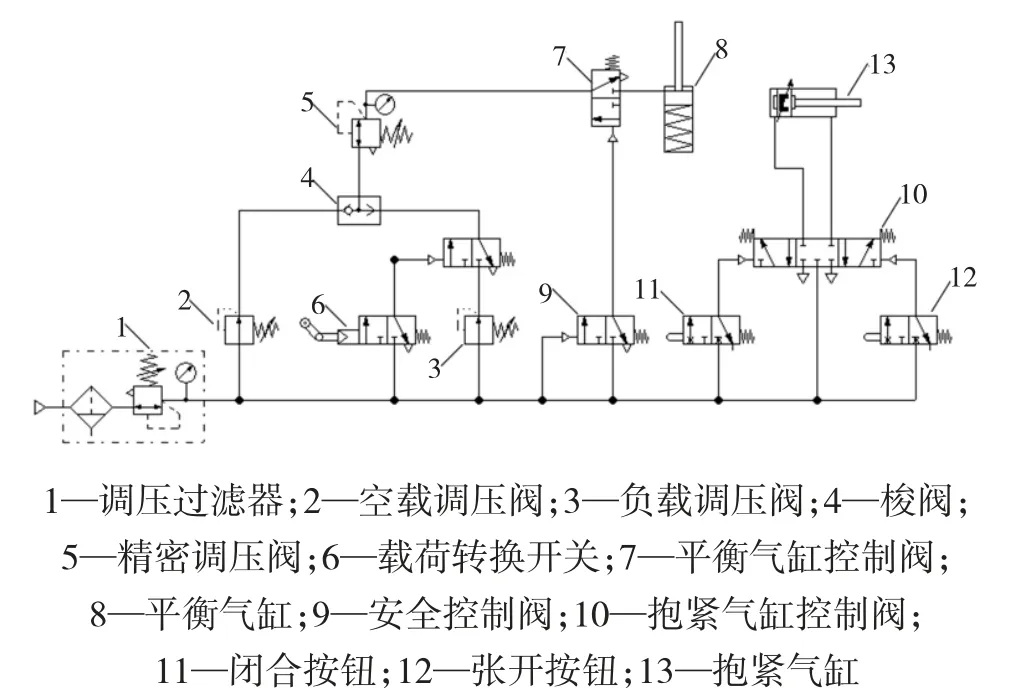
圖6 氣控系統原理
移載機械手夾取產品的工作過程為:氣控系統回路處于空載平衡狀態,拉動機械手到預夾取位置,按下閉合按鈕,抱緊氣缸控制閥通氣,抱緊氣缸在高壓空氣作用下使得夾具閉合,夾具夾住產品,然后撥動載荷轉換開關,氣控系統回路處于負載平衡狀態,拉動機械手到卸貨位置,按下張開按鈕,抱緊氣缸缸桿伸出,夾具張開卸下產品。機械手向下移動時,平衡氣缸內壓力倍增,空氣由精密調壓閥溢流口排入大氣中,維持氣缸壓力不變。當向上抬起機械手時,平衡氣缸壓力下降,精密調壓閥恒壓輸出補償,同樣維持缸內壓力不變,從而達到平衡氣缸的助力、省力功能。安全控制閥這一支路起安全保護作用,當氣源突然停氣,安全控制閥支路不再貫通,平衡氣缸控制閥動作,使得平衡氣缸氣路阻斷,進而維持氣缸壓力不變,保證產品緩慢回落。
3 校核分析
3.1 機械臂校核
本文設計的氣動平衡移載機械手旋轉半徑不小于3 m,可以起吊質量不低于50 kg 的產品。設計時所選用的平衡氣缸缸徑為D=200 mm,桿徑d=40 mm,氣源壓力P=0.6 MPa,氣缸上端進氣,下端排氣,機械臂及平衡氣缸的受力如下頁圖7 所示[5]。
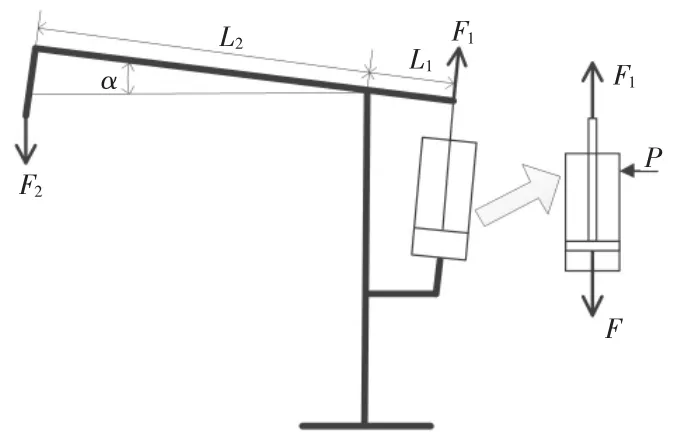
圖7 機械臂及平衡氣缸受力圖
對機械臂進行受力分析有:

設計時取L1=0.5 m,L2=3 m,安全系數n=3,α=90°,則有:F2=509.8=490N,F1==8820 N。
比較可知,F>F1,則選用的平衡氣缸能提起產品,滿足設計要求。
3.2 夾具校核
本文依據產品特點采用的是雙夾具,單套夾具施加的力為抱緊氣缸輸出力的一半。設計時選用的抱緊氣缸缸徑為D=80 mm,桿徑d=25 mm,氣源壓力P=0.6 MPa。抱緊氣缸及單套夾具的受力如圖8 所示。其中,抱緊氣缸的輸出力為:F=PS=×0.082=3014.4 N。
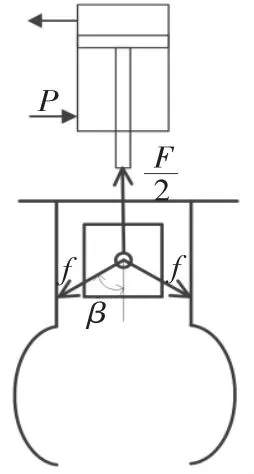
圖8 抱緊氣缸及單套夾具受力圖
對該夾具進行受力平衡分析有:

式中:β 為抱緊氣缸輸出力方向與抱爪受力方向的夾角,40°≤β≤70°;安全系數n=1.5。
抱爪的受力如圖9 所示,針對單邊的抱爪進行水平方向的受力分析可知:
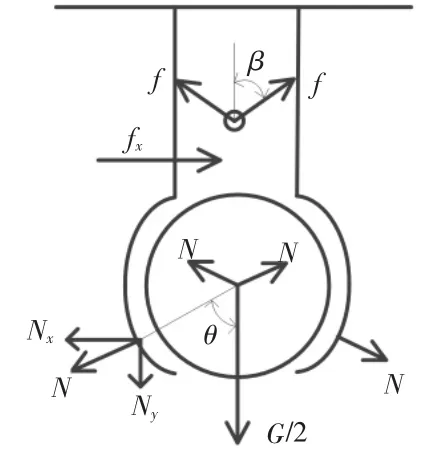
圖9 抱爪受力圖

其中:
聯立求解有:
對產品進行受力平衡分析可知:

代入求解有:

抱爪閉合夾緊產品時,β=40°。本文設計的抱爪為兜爪,兜取產品時兜爪的有效支撐夾角40°≤θ≤90°,則有:
本套夾具可以提起的產品質量為(745÷9.8)76 kg>50 kg,滿足起吊產品的要求。
4 結語
針對中大口徑長軸類圓柱型產品的移載問題,本文提出了一種氣動平衡移載機械手,并對其機械臂及夾具進行了詳細設計,同時繪制了氣控系統的工作原理圖,分析了其空載平衡與負載平衡的控制原理,最后對機械臂及夾具的受力進行了校核分析,經計算所選用的平衡氣缸能滿足旋轉半徑3 m,垂直升降高度1 m 的工作要求,設計的夾具也滿足重量50 kg 以內的產品的自由移載。
猜你喜歡
當代工人(2020年8期)2020-05-25 09:07:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:23:50
玩具(2009年10期)2009-11-04 02:33:14
個人電腦(2009年9期)2009-09-14 03:18:46