結合目標檢測與定位的物料抓取研究
2022-07-07 12:42:34肖志強周書民汪志成
電子技術與軟件工程
2022年5期
肖志強 周書民 汪志成
(東華理工大學機械與電子工程學院 江西省南昌市 330013)
1 引言
在手機玻璃基板的生產過程中,需要對玻璃基板進行AOI視覺檢測,玻璃基板根據不同的質量放在放置區域的放置柜中,由人工拿到檢測區域進行AOI檢測,工作重復性很高,并且在AOI檢測過程中,工人需要等待,造成時間浪費,如果使用固定基座的機械臂進行上下料,每一個放置柜都需要配一臺機械臂,還需要配備傳送帶進行運輸,這樣成本很高。為了降低成本,使用移動機械臂進行物料運送任務,玻璃基板是裝在物料框中,機械臂抓取放置柜的物料,運送到AOI檢測區域,在這一批物料檢測的過程中,移動機械臂可以去另一個放置柜抓取物料并運送,以此往復。為了準確的抓取到物料并運送到目標區域,物料的三維坐標識別是主要問題,本文基于深度學習算法中的YOLOv5,實現物料的識別,使用兩臺海康威視的MV-CA032-10G10型號,焦距為6mm的相機組成雙目系統來進行物料的定位。
主要工作流程為從雙目相機獲得左右圖像后,使用訓練好的YOLOv5模型進行識別,得到物料的抓取點,以左圖像為基準,使用SGBM算法進行圖像的立體匹配,獲得視差圖,得到物料抓取點的三維坐標,完成物料的三維定位。
2 YOLOv5算法
YOLOv5可以分為四個網絡模型版本:YOLOv5s、YOLOv5m、YOLOv5l和YOLOv5x,其中YOLOv5l是基準模型,YOLOv5x是擴展模型,YOLOv5s和YOLOv5m是預設的簡化模型。他們的主要區別在于網絡深度和寬度有差異,YOLOv5的結構如圖1所示。
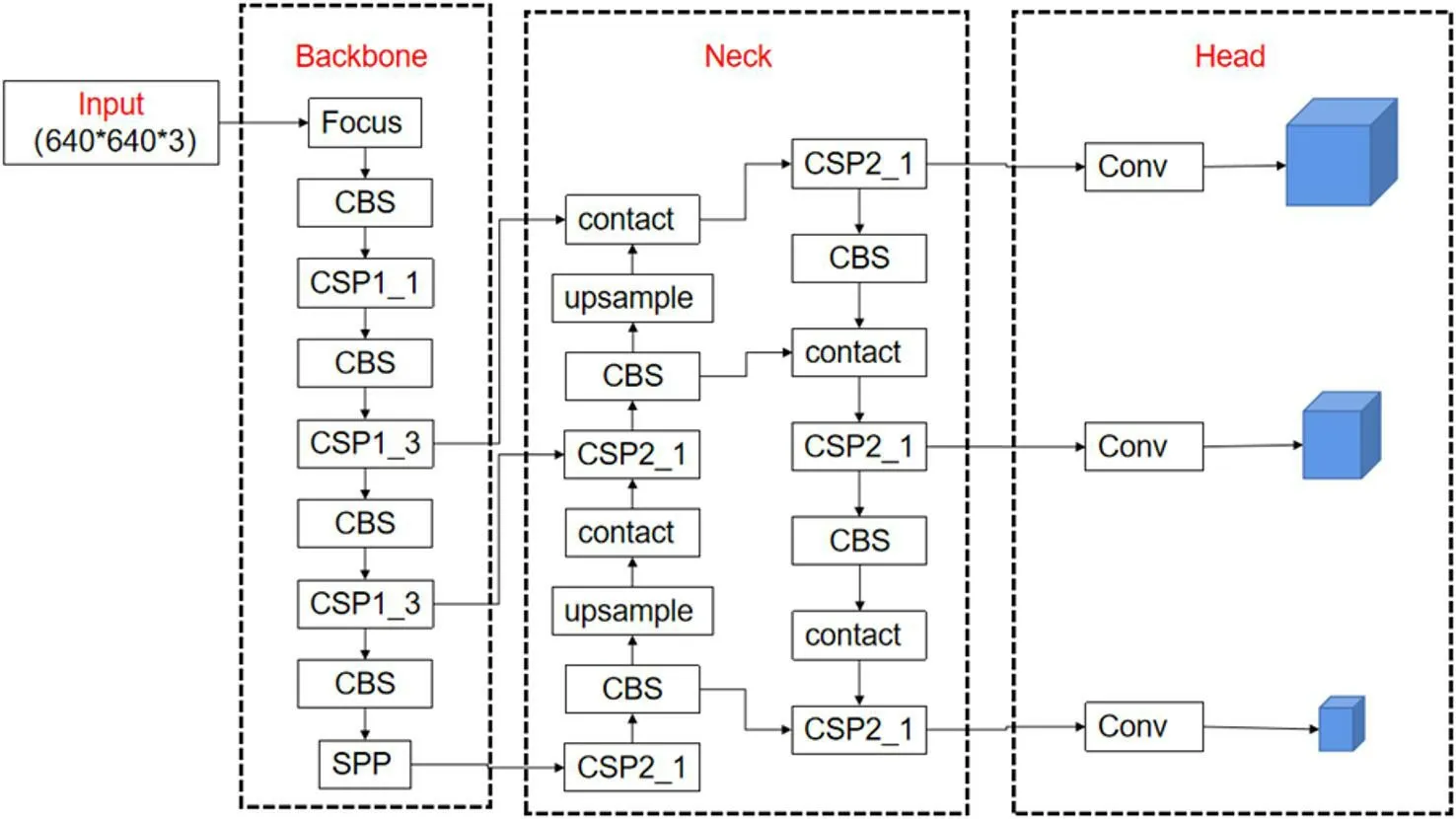
圖1:YOLOv5結構
輸入端(Input)是圖像預處理階段,主要包括三個部分來提升訓練效率,分別是馬賽克(Mosaic)數據增強、自適應錨框計算和自適應圖像縮放技術。……
登錄APP查看全文
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(2016年3期)2016-05-17 04:32:12
核科學與工程(2015年4期)2015-09-26 11:59:03
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00