基于數(shù)字孿生的機器人實驗平臺設(shè)計*
2022-07-04 12:08:08趙俊英李云龍胡成琳
制造技術(shù)與機床 2022年7期
趙俊英 李云龍 邵 欣 胡成琳 鄧 玖
(天津中德應(yīng)用技術(shù)大學,天津 300350)
工業(yè)機器人在焊接、裝配、分揀和涂膠等制造業(yè)領(lǐng)域應(yīng)用廣泛,相關(guān)應(yīng)用和人才需求迅速增加[1?2]。機器人二次開發(fā)和出廠檢測的時候,需要進行大量的實驗驗證,已有的工業(yè)機器人實驗臺大多采用工業(yè)機器人真機或仿真系統(tǒng)[3]。這些載體存在以下弊端:一是價格較為昂貴,實驗資源有限,且試錯的成本較高[4];二是不能實現(xiàn)虛實同步,仿真與實物往往互相獨立,缺少虛擬資源與真實設(shè)備的聯(lián)動,不能發(fā)揮出虛擬資源的真正優(yōu)勢;三是結(jié)構(gòu)封閉,機器人公司所配備的機器人本體和控制系統(tǒng)大多是封閉式結(jié)構(gòu),并且各個品牌間沒有統(tǒng)一的標準[5],導致實驗過程的可視性差,并加大了設(shè)備的維護、升級改造的難度與成本。另一方面,在實際工程應(yīng)用中,機器人運動學理論的運算和建模計算工作量繁重[6]。針對以上問題,通過引入數(shù)字孿生技術(shù)設(shè)計基于數(shù)字孿生的機器人平臺,可降低二次開發(fā)應(yīng)用的成本、節(jié)約時間。
利用該平臺,可以進行工業(yè)機器人坐標系標定、工業(yè)機器人本體控制及與周邊設(shè)備的協(xié)同控制等,還可以開展機器人正逆解研究及其他類型設(shè)備的運動學研究,完成機器人運動學參數(shù)配置等實驗。
1 整體結(jié)構(gòu)設(shè)計
依據(jù)數(shù)字孿生五維模型理論[7],構(gòu)建了基于數(shù)字孿生的機器人平臺系統(tǒng),包括物理對象、虛擬模型、連接、數(shù)據(jù)和服務(wù)系統(tǒng),設(shè)計思路如圖1所示。工業(yè)機器人的核心是控制系統(tǒng),而控制的關(guān)鍵對象是多伺服電機的協(xié)同動作;另外工業(yè)機器人本體結(jié)構(gòu)及控制系統(tǒng)存在封閉性高、技術(shù)升級困難等弊端[5],設(shè)計開放性的控制系統(tǒng)對于二次開發(fā)具有十分重要的作用。針對以上問題,平臺采取開放式的設(shè)計,使機器人的運動軸及控制系統(tǒng)直接展現(xiàn)出來。
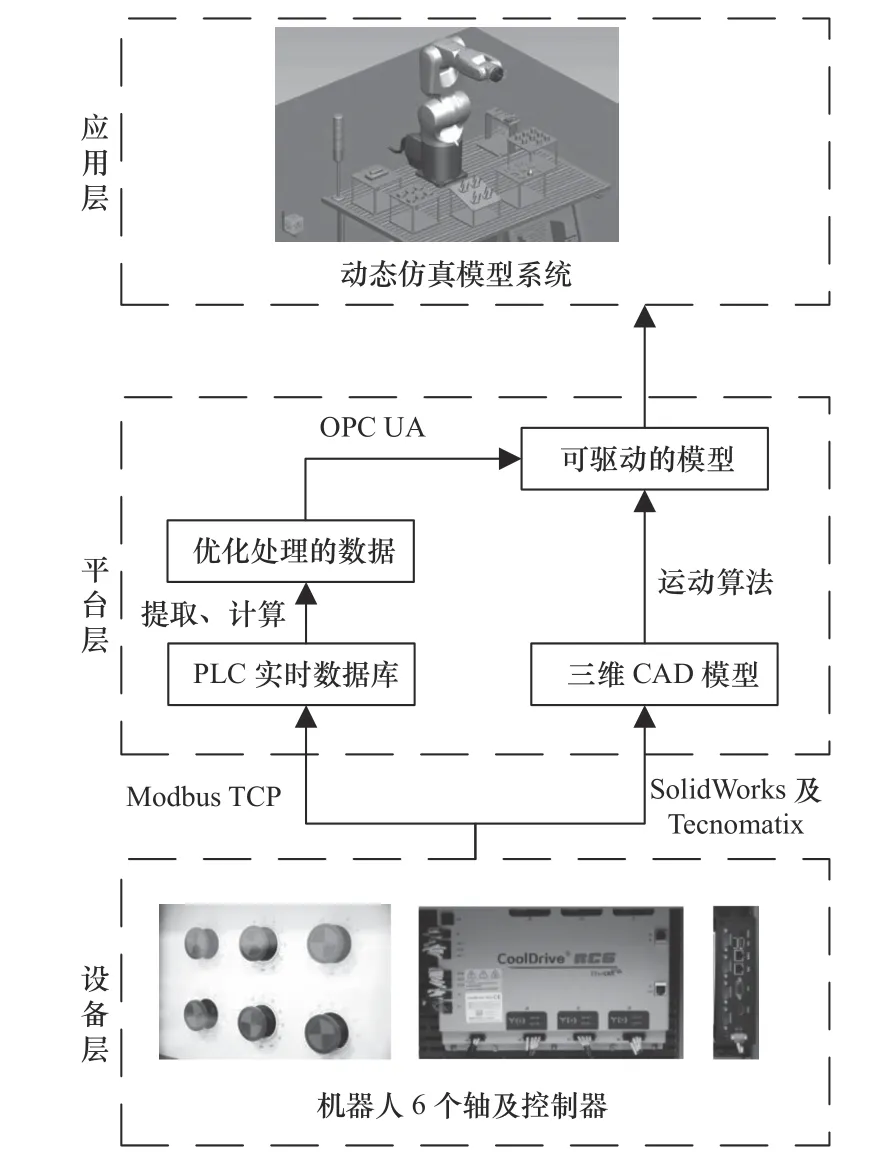
圖1 實驗平臺設(shè)計思路
1.1 結(jié)構(gòu)組成與通信
實驗平臺整體硬件架構(gòu)由機器人控制柜、PLC與觸摸屏和計算機三大部分組成,其主要作用分別為實現(xiàn)工業(yè)機器人運動功能、構(gòu)建孿生數(shù)據(jù)庫及搭建虛擬模型。三部分硬件實時互聯(lián)互通,如圖2所示。平臺硬件系統(tǒng)采用開放式設(shè)計,包括機器人6個關(guān)節(jié)的驅(qū)動元件(即6個伺服電機)、伺服控制器、機器人控制器、機器人示教器、擴展板、交換機、開關(guān)電源、按鈕、指示燈、PLC和觸摸屏等。
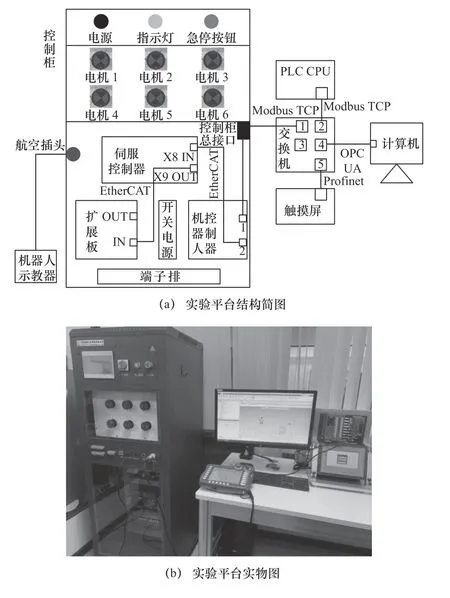
圖2 實驗平臺結(jié)構(gòu)簡圖及實物圖
整個工業(yè)網(wǎng)絡(luò)通信通過工業(yè)交換機進行連接。首先介紹控制柜,6個電機的伺服控制器通過X8 IN端口與機器人控制器端口2連接,又通過X9 OUT與擴展I/O板的IN口相連,均采用EtherCAT通信。擴展I/O板的OUT口與擴展模塊相連。機器人控制器端口1,經(jīng)控制柜總接口連接到交換機端口1;PLC連接到交換機端口4,通信協(xié)議為Modbus TCP,實現(xiàn)機器人控制器與PLC的通信。除上述連接外,PLC與HMI采用Profinet通信協(xié)議;PLC與計算機中仿真軟件采用OPC UA進行數(shù)據(jù)采集,OPC UA是實現(xiàn)設(shè)備層數(shù)據(jù)到計算機虛擬仿真軟件的關(guān)鍵。另外,機器人示教器通過航空插頭連接到控制柜。
機器人實驗平臺結(jié)構(gòu)簡圖及實物圖如圖2所示。
1.2 實驗平臺工作流程
整體上,實驗平臺是通過在真實的示教器中操作、編程,使實體工業(yè)機器人控制系統(tǒng)與虛擬機器人聯(lián)動運行,即實現(xiàn)物理實體與仿真模型虛實同步。圖3為平臺對J2(第二關(guān)節(jié))的控制流程。
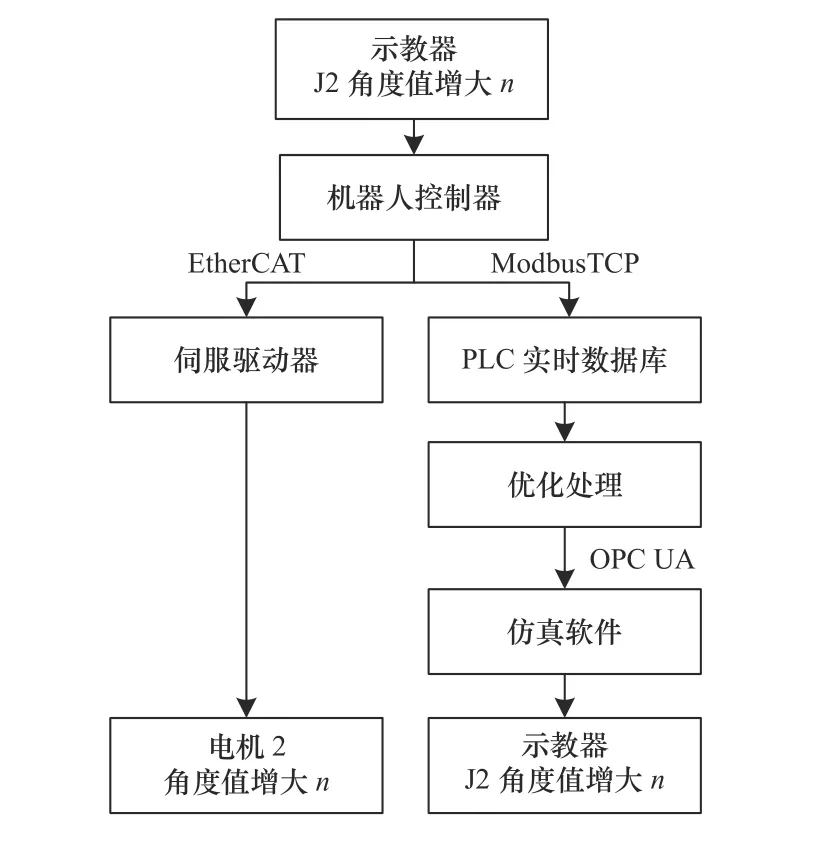
圖3 運行狀態(tài)下實驗平臺工作流程
(1)在運行狀態(tài)下,通過示教器發(fā)出控制指令,經(jīng)機器人控制器轉(zhuǎn)換后傳遞給伺服控制器,進而通過脈沖輸出控制電機2轉(zhuǎn)動。同時,機器人控制器發(fā)出的控制信息,經(jīng)控制柜總接口1傳遞至PLC,并在PLC數(shù)據(jù)庫中儲存、處理,而后被仿真系統(tǒng)采集,進而驅(qū)動虛擬機器人第二關(guān)節(jié)轉(zhuǎn)動。至此虛擬機器人與物理實體實現(xiàn)實時聯(lián)動,即實現(xiàn)虛實同步。如圖3所示。
(2)在初始狀態(tài)下,虛擬模型則通過上述流程讀取物理實體的參數(shù)值并執(zhí)行,使虛擬模型狀態(tài)與物理實體保持一致。
2 數(shù)字孿生模型的構(gòu)建
基于數(shù)字孿生理念,本文在虛擬系統(tǒng)中構(gòu)建了實際物理系統(tǒng)的數(shù)字映像,實現(xiàn)了虛實間的數(shù)據(jù)交互、狀態(tài)同步等,為物理實體的狀態(tài)監(jiān)控和運動控制等擴展了新的能力。構(gòu)建數(shù)字孿生模型時,先在SolidWorks軟件中創(chuàng)建CAD模型,經(jīng)兼容性處理后導入Tecnomatix仿真環(huán)境中,在虛擬環(huán)境中設(shè)置虛擬模型的運動參數(shù)、虛實控制映射關(guān)系等。通過西門子S7-1500PLC實現(xiàn)虛擬環(huán)境與物理實體間數(shù)據(jù)收發(fā)、運動控制和運行結(jié)果可視化等功能。虛擬模型如圖4所示。
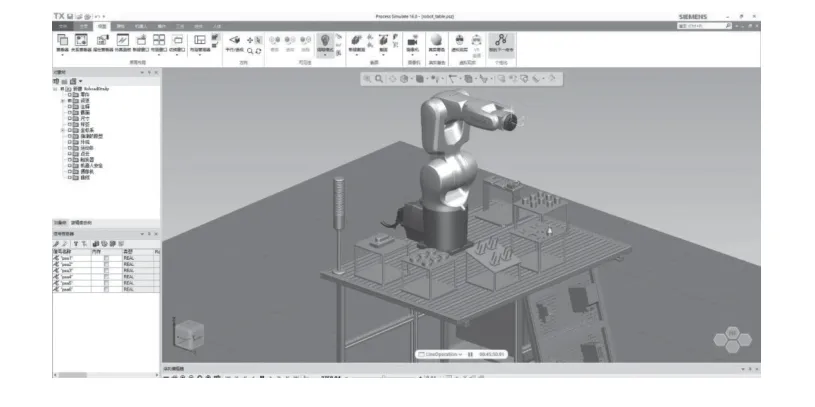
圖4 Tecnomatix數(shù)字仿真系統(tǒng)及某一虛擬模型
2.1 仿真模型的運動控制
工業(yè)機器人本體的運動控制分為兩類,它們是PTP(點到點運動)和CP(連續(xù)軌跡)的運動控制[8]。為了對虛擬機器人實現(xiàn)這兩種控制,機器人控制器需要對采集到的數(shù)據(jù)進行計算,使其轉(zhuǎn)換成能夠正確驅(qū)動仿真模型的數(shù)據(jù)。
(1)PTP運動控制。在進行PTP運動時,需要通過關(guān)節(jié)角參數(shù)值,計算得到機器人末端執(zhí)行器的位置和姿態(tài),也就是進行運動學的正向求解。
本文選用D-H矩陣來進行求解,通過建立各關(guān)節(jié)所代表的坐標系矩陣并計算乘積,求出虛擬手抓在虛擬機器人系統(tǒng)的基坐標系中的齊次變換矩陣。依照式(1)求出虛擬機器人各關(guān)節(jié)組成部位之間的變換矩陣,從而求出手抓的坐標姿態(tài)。
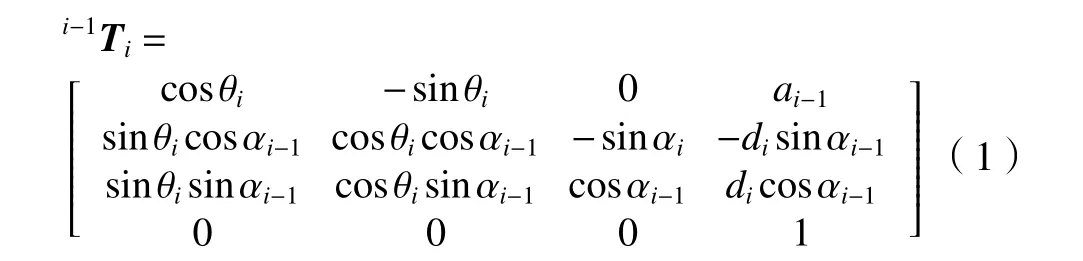
式中:αi為關(guān)節(jié)扭轉(zhuǎn)角,ai為連桿長度,θi為關(guān)節(jié)角,di為連桿偏移量。
通過計算各部位的矩陣乘積即可得出虛擬手抓在虛擬機器人系統(tǒng)的基坐標系中的齊次變換矩陣0T6

(2)CP連續(xù)運動控制。當虛擬機器人執(zhí)行此類運動時,需要進行逆向求解。即已知末端執(zhí)行器的位姿0T6求解出各個關(guān)節(jié)角的角度值θi。求解時,聯(lián)立式(1)、(2),并利用矩陣求逆,可得到
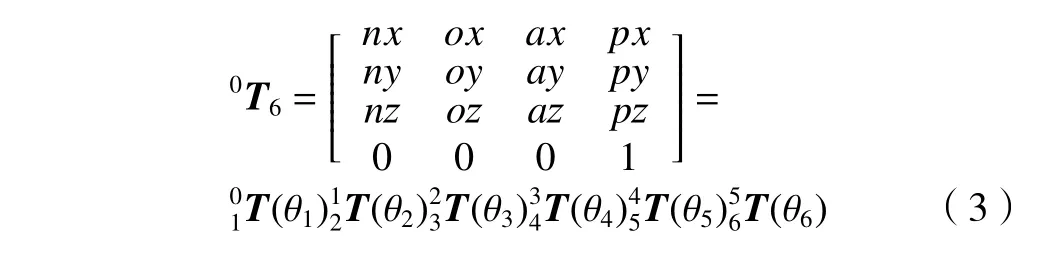
求得
式中:ci表示cosθi,si表示sinθi。
2.2 數(shù)據(jù)的采集與交互
數(shù)字孿生體與物理實體的虛實融合需要高質(zhì)量的數(shù)據(jù)交互作為物質(zhì)載體[9]。本文主要涉及真實機器人系統(tǒng)對實時數(shù)據(jù)信息的采集與傳遞,以及數(shù)字孿生體對物理實體狀態(tài)的實時讀取與監(jiān)控。在這種雙向性的實時數(shù)據(jù)和信息交互下,一方面機器人驅(qū)動電機等物理實體的動態(tài),將以可視化的形式反映在其數(shù)字孿生體上,對其狀態(tài)進行監(jiān)控;另一方面,其數(shù)字孿生體對得到的數(shù)據(jù)、狀態(tài)等進行分析,可以反向影響、控制物理機器人本體。數(shù)據(jù)傳輸如圖5所示,圖6展示了某一組數(shù)據(jù)在PLC中存儲、轉(zhuǎn)換的程序段。
圖5 數(shù)據(jù)傳輸示意圖
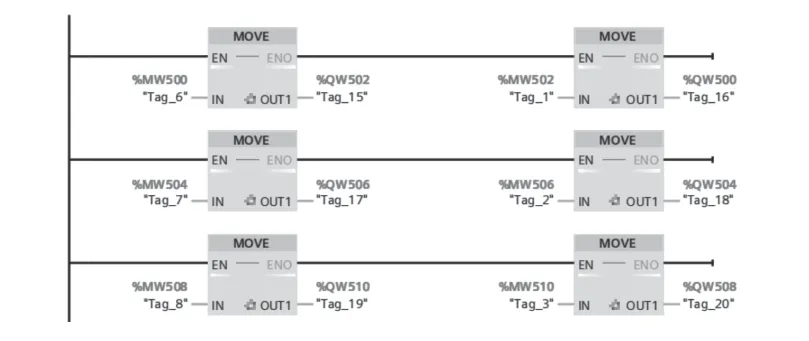
圖6 在PLC中進行數(shù)據(jù)存儲與處理
3 實驗與驗證
工業(yè)機器人系統(tǒng)應(yīng)能夠?qū)崿F(xiàn)對機器人本體的控制,以及與周邊設(shè)備的協(xié)調(diào)控制[10?11]。從這個角度出發(fā),對平臺進行虛實同步驗證實驗、工業(yè)機器人坐標系標定實驗、工業(yè)機器人本體控制及與周邊設(shè)備的協(xié)同控制實驗。
3.1 虛實同步性能驗證
針對平臺的虛實同步性能進行了一系列實驗。某次實驗中,J2初始值為?0.12,通過示教器使J2的角度值增加至0.15,理論上,電機實物與仿真機器人的第二關(guān)節(jié)都應(yīng)向正方向轉(zhuǎn)動0.27°,實驗過程如圖7所示。經(jīng)過多次實驗,得到表1所示數(shù)據(jù),實驗結(jié)果表明該平臺虛實同步性能可靠。
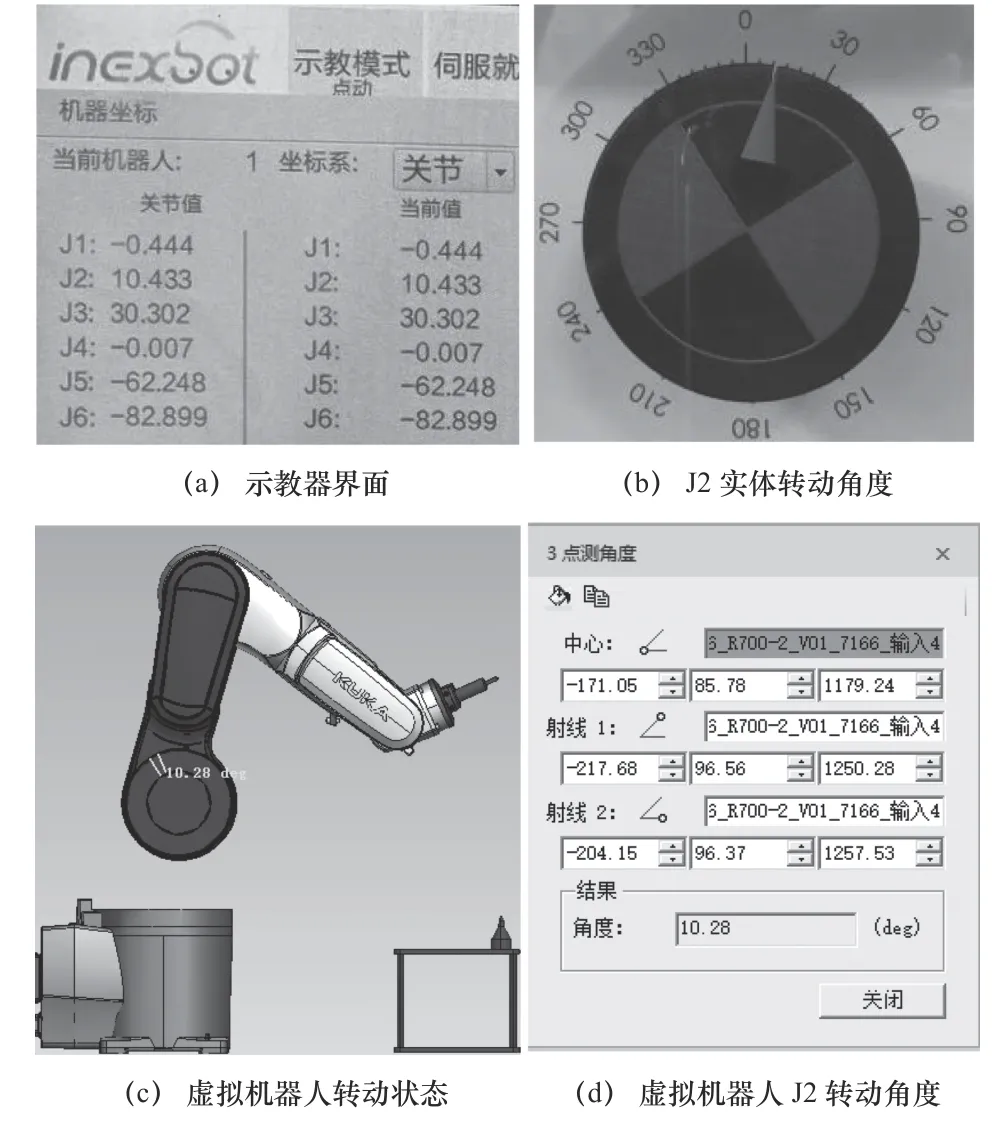
圖7 虛實同步性能實驗
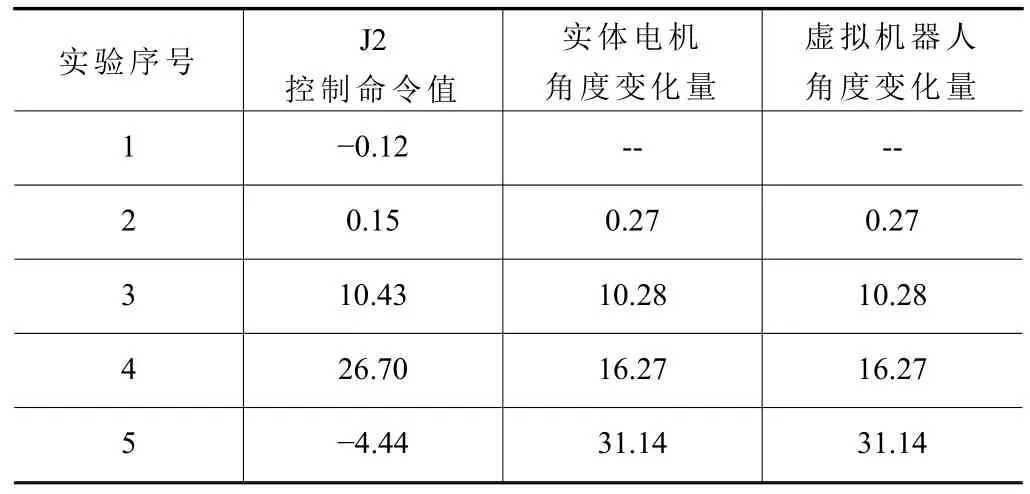
表1 虛實同步性能實驗數(shù)據(jù)
3.2 工業(yè)機器人坐標系標定實驗
在工業(yè)機器人的實際應(yīng)用中,不同的使用環(huán)境,要求工具的位姿具有不同的特點。因此,快速實現(xiàn)工具坐標系的創(chuàng)建與標定,是工業(yè)機器人調(diào)試的重要環(huán)節(jié)。圖8是采用7點標定法進行工具坐標系標定時的場景,依此方法在示教器中完成7個點位標定后,即完成了該工具坐標系標定。
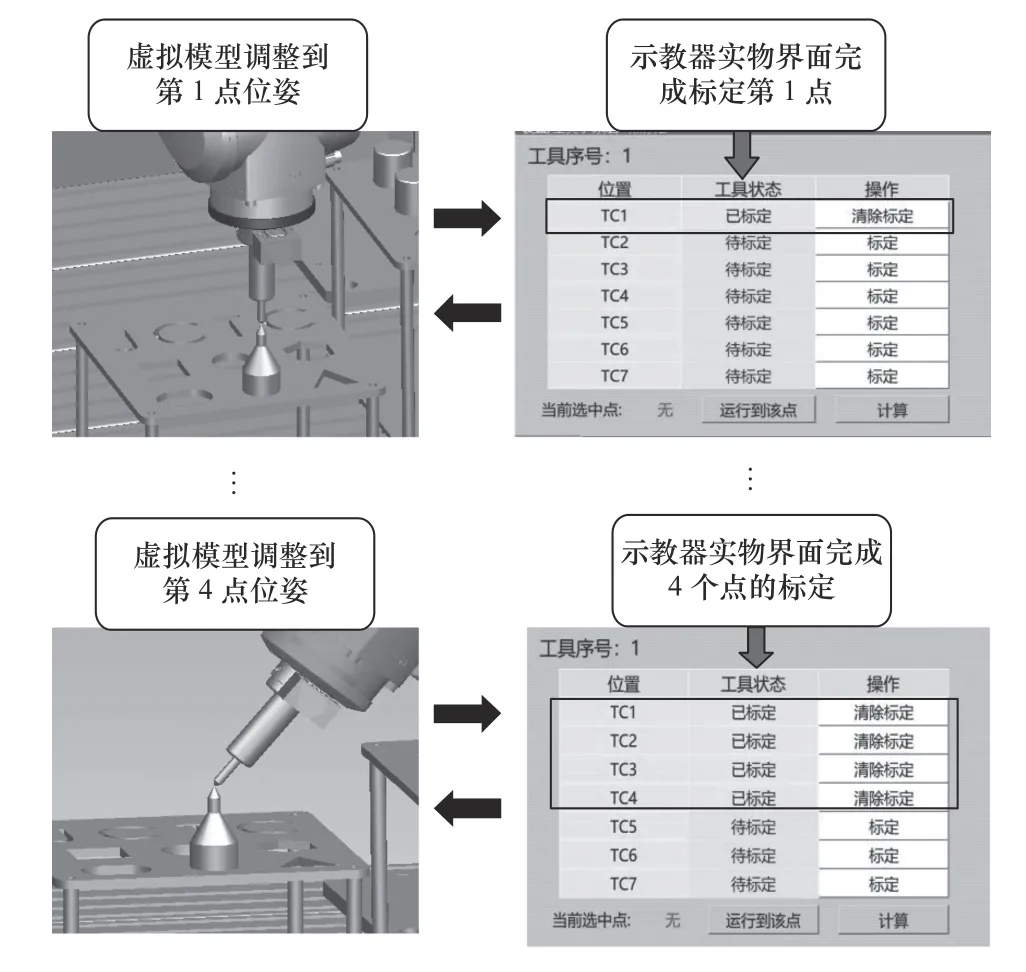
圖8 采用7點標定法進行工具坐標系標定
基于前文“2.2 數(shù)據(jù)的采集與交互”中所述數(shù)據(jù)計算方法,在示教器輸出運動控制信息后,Tecnomatix軟件中的虛擬模型收到已解析的數(shù)據(jù),并進行相應(yīng)運動。實驗平臺的可視化模塊,使得電機旋轉(zhuǎn)角度、速度等參量值在虛擬界面動態(tài)顯示,如圖9所示。
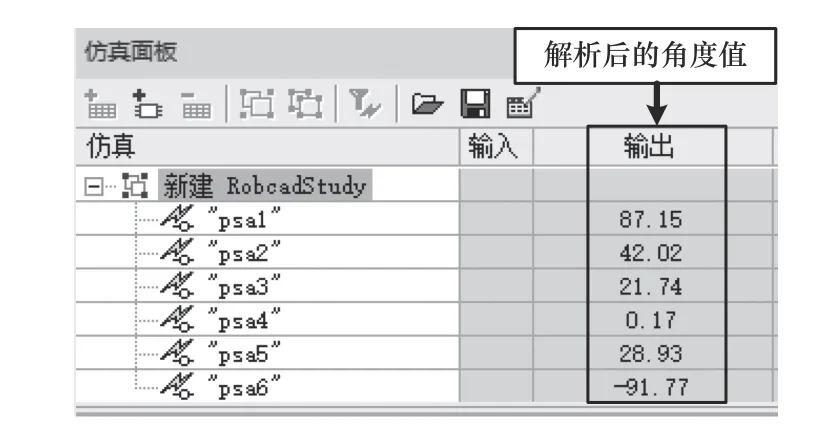
圖9 Tecnomatix軟件顯示的部分解析數(shù)據(jù)
3.3 機器人軌跡規(guī)劃實驗
采用上述工具坐標對機器人進行單軸運動和多軸運動實驗,使虛擬機器人完成焊接任務(wù),虛擬機器人的焊接運動控制軌跡如表2所示。
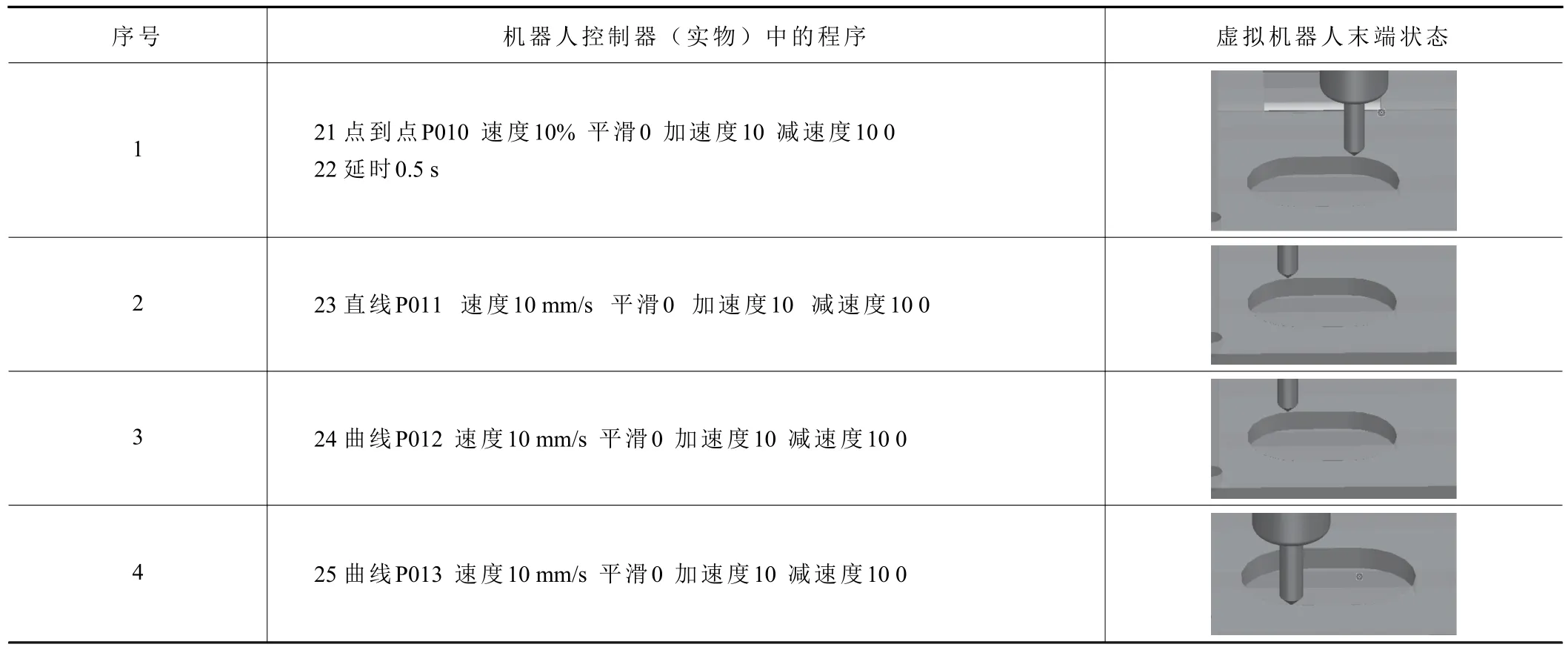
表2 軌跡運動控制實驗
圖10所示為機器人速度與加速度曲線,觀察可知機器人速度和加速度的初始值和終止值均為 0,曲線平緩光滑,無突變、跳躍和間斷,說明機器人運動平穩(wěn)。實驗表明,該平臺能夠更準確地實現(xiàn)機器人軌跡控制,同時也驗證了平臺中虛擬機器人的工具坐標系創(chuàng)建和標定準確可靠。

圖10 機器人速度與加速度曲線
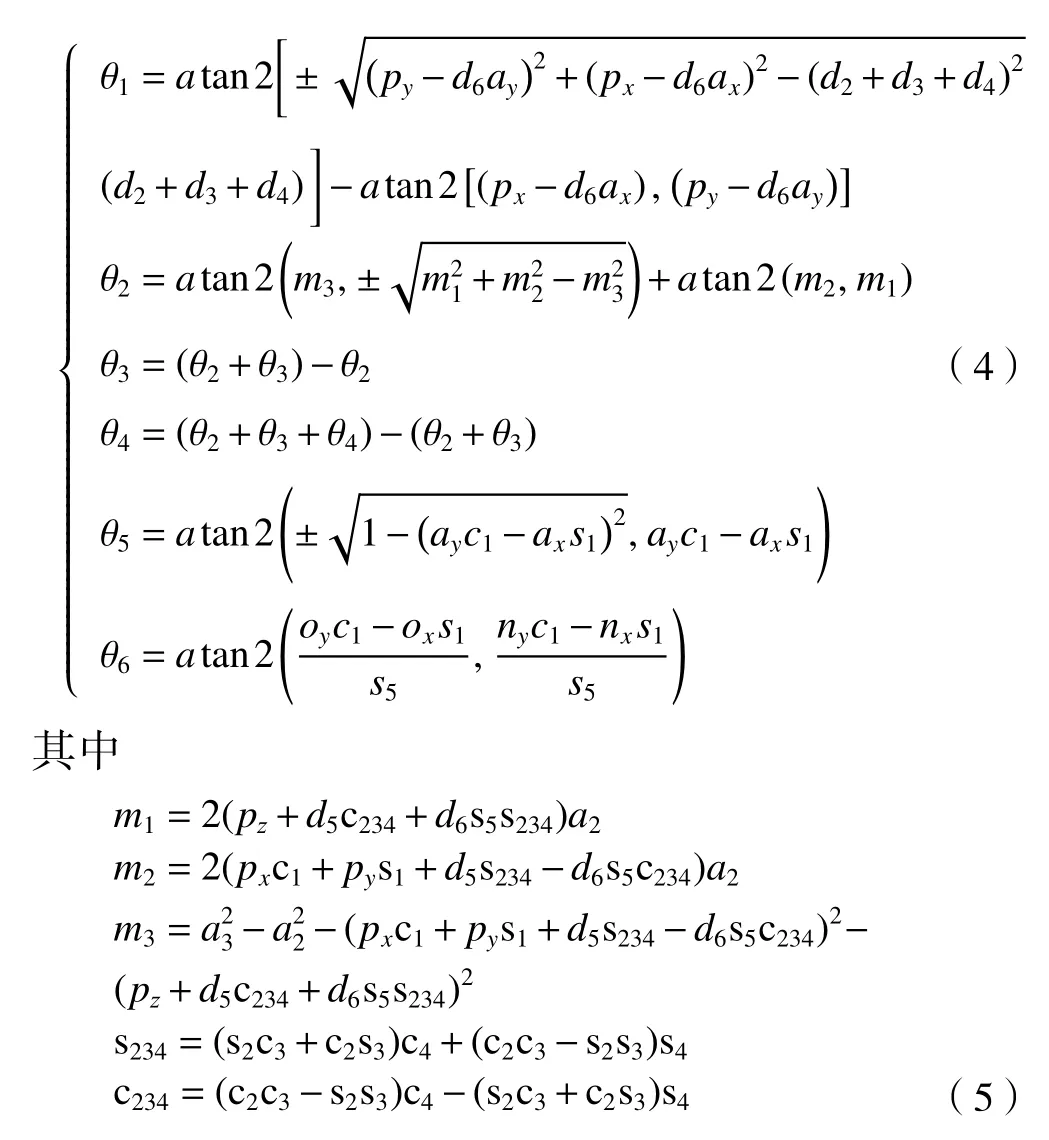
3.4 工業(yè)機器人與周邊設(shè)備的協(xié)同控制
通過搬運碼垛任務(wù)驗證工業(yè)機器人與周邊設(shè)備的協(xié)同控制。
機器人系統(tǒng)需對指定數(shù)量的工件進行搬運,以紅、綠、黃等不同顏色的指示燈指示工作狀態(tài)。完成搬運時,虛擬機器人發(fā)出“碼垛完成”的信號,經(jīng)PLC傳遞給機器人控制器實體;控制器經(jīng)過程序判斷,發(fā)出紅燈常量控制指令;該指令通過PLC同時傳遞給紅燈實物和虛擬機器人,以I/O控制的方式點亮實物紅燈,同時以開關(guān)量信號點亮虛擬模型中的紅燈,如圖11所示。實驗表明,平臺中可準確實現(xiàn)機器人與周邊設(shè)備的協(xié)同控制。
4 結(jié)語
針對已有的工業(yè)機器人實驗載體存在的弊端,設(shè)計了基于數(shù)字孿生的工業(yè)機器人平臺。設(shè)計并搭建了開放式的硬件平臺,建立了數(shù)字孿生模型,實現(xiàn)了虛實同步。與已有的單一仿真系統(tǒng)相比,該平臺應(yīng)用數(shù)字孿生技術(shù)實現(xiàn)虛擬資源與真實設(shè)備的聯(lián)動,可實現(xiàn)多種工作環(huán)境的快速、個性化創(chuàng)設(shè),以更快的速度、更低的成本,驗證機器人設(shè)計的合理性與應(yīng)用效果;該平臺還可以對試驗系統(tǒng)的運行狀態(tài)進行實時監(jiān)控、反饋。另外,開放式的設(shè)計提升了可視化效果,也使得設(shè)備便于維護、升級和改造。實驗結(jié)果表明,該平臺虛實同步性能可靠,能準確可靠地實現(xiàn)工業(yè)機器人坐標系標定、工業(yè)機器人本體運動控制及與周邊設(shè)備的協(xié)同控制。
目前該系統(tǒng)已在天津某公司投入應(yīng)用,為二次開發(fā)、技術(shù)研發(fā)、員工培訓使用,實際使用效果表明該平臺降低了二次開發(fā)應(yīng)用的成本、節(jié)約了時間。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
