基于K-means聚類算法的鋰電池冗余均衡控制
2022-07-02 05:34:46詹鑫斐俞智坤陳斌藝
電源技術 2022年6期
關鍵詞:實驗
黃 靖,詹鑫斐,俞智坤,熊 巍,陳斌藝,3
(1.福建工程學院電子電氣與物理學院,福建福州 350118;2.工業自動化福建省高校工程研究中心,福建福州 350118;3.電子信息與電氣技術國家實驗示范中心,福建福州 350118)
近年來,動力電池由于在生產制造中存在工藝差異導致鋰電池存在不一致,電池的不一致性會進一步影響電池壽命。因此,需要電池均衡電路對串聯電池組均衡;在保證均衡可靠的前提下,實現電池組的快速均衡和減少均衡的開關次數是目前電池領域的主要研究方向之一。
現有的均衡方式主要為主動均衡、被動均衡以及冗余均衡等。主動均衡控制以Buck-Boost 均衡、反激式均衡、帶DCDC 的均衡和電容均衡最為常見。文獻[1]提出了一種基于Buck-Boost 電路的新型均衡電路,根據荷電狀態(SOC)來控制均衡,實現了鋰離子串聯電池組充放電均衡和電池組充放電容量的提高。在此基礎上,文獻[2]提出了一種結合Buck-Boost 均衡電路和Flyback 均衡電路的主動均衡電路,并基于電壓和SOC雙變量的均衡控制策略,減少了均衡時間,提高了均衡效率。文獻[3]提出了一種基于反激變換器的均衡拓撲,同時采用雙目標直接均衡控制策略,將充電過程和放電過程的均衡合二為一,同時實現充放電過程最高端電壓的降低和最低端電壓的升高。被動均衡以其設計簡單和低成本特性成為現代工業中最受歡迎的形式[4]。被動均衡結構通過使電壓高的單元消耗能量來平衡電池組內各個單元間容量差,這種方式控制邏輯簡單、成本低,但是存在能量損耗大的問題[5-7]。
除了主動均衡和被動均衡,常見的均衡電路結構還有冗余均衡。文獻[8]提出了一種具備冗余單元的高效電池管理系統策略,從冗余數量、切換時間、能量差、電池初始容量等角度實驗,通過等能量均衡控制,提高了電池組放電效率和使用壽命。上述均衡方式在均衡時間和能量轉換率上有明顯提高,但主動均衡必然存在自放電損失和能量轉移損耗,冗余均衡則不存在能量轉移損失,但傳統的等能量控制依靠提高切換頻率,提高電池組放電均衡效果,但是頻率太高會產生諧波和增加開關損耗。
本文基于鋰電池冗余均衡電路,以各個電池單元的荷電狀態一致為目標,采用K-means 聚類算法的鋰電池組冗余均衡控制方法對電池組的開關進行控制。此方法結合K-means聚類算法,得出電池組均衡過程中各個電池單元的類別,將每個單體電池的放電過程分解,多次切換開關組合實現均衡。分別對傳統等能量冗余均衡控制和K-means 聚類控制兩種方法分組實驗并進行對比,驗證了K-means 聚類算法均衡控制的可行性。
1 均衡電路設計
1.1 均衡系統結構
電池均衡系統是一種能量管理系統,其目的是減小電池組內各電池單體間的能量差異,從而提高電池組的一致性。本文的均衡控制系統如圖1 所示,冗余均衡系統主要由電池組、開關管控制單元、電源單元、單片機、RS485 通訊單元、上位機以及AD 采樣單元組成。通過系統電池組和電源單元分別產生開關管驅動電壓和各個芯片的電源電壓,通過AD 采樣單元將采集到的數據處理計算,反饋給單片機,經單片機估算得出電池模塊的SOC;根據單片機內的估算SOC和內置算法實現對串聯的電池組接入接出控制,當電池組達到預設均衡效果停止開關切換;最后,由RS485 通訊模塊完成單片機和上位機的通訊,通過通訊軟件PuTTY 將實時數據顯示在上位機上并記錄。

圖1 均衡控制系統
1.2 均衡原理
本文研究的對象為冗余均衡鋰電池組,均衡拓撲結構如圖2 所示,電池組由6 個電池單元串聯組合而成,其中每個電池單元由三串電池組成,18 個單體電池B1~B18 串聯,每兩個開關并聯在一個鋰電池單元兩端。結構上,第1~6 個電池單元依次連接,每個單體電池兩端并聯一個被動均衡電路,第i個電池單元的正極端和負極端分別連接開關管Qi2 的d 端和Qi1 的s 端,第2~6 個單元的開關管Qi2 的s 端和Qi1 的d 端、Q(i+1)1 的s 端相連接;系統的地為電池B1 的負極端。

圖2 鋰電池冗余均衡拓撲結構
均衡原理:通過控制開關的通斷,將電池單元導通或者旁路,其中Qi1 開關導通,Qi2 開關截止,第i個單元的電池被導通,使其接入負載兩端參與充放電,并且Qi2 和Qi1 開關不能同時導通,同時導通會造成電池單元短路;均衡控制主要通過單片機計算放電量,當釋放一定電量,允許開關切換;當達到均衡要求時,停止開關切換,所有電池單元接入,參與放電。同時,每個單節電池兩端并聯一個被動均衡電路,電池單元的電壓高于4.2 V 時開啟被動均衡。這樣的結構設計簡單,控制方便,電路穩定性良好,電路結構靈活。
2 基于聚類算法的冗余均衡策略
2.1 K-means 聚類算法原理
K-means 聚類算法的輸入為一個樣本集,通過算法將樣本聚類,具有相似特征的樣本聚為一類,操作簡單、運算速度較快,能夠有效處理中小型數據集。聚類原理:針對鋰電池冗余均衡電路,K-means 聚類算法對n個電池單元的SOC進行聚類,i為鋰電池冗余均衡過程中根據需要劃分的種類個數,分為SOC高的一類和SOC低的一類;對距離最近的對象進行歸類。根據上述原理設計K-means 聚類流程,如圖3 所示。算法具體步驟為:

圖3 K-means聚類流程圖
(1)初始化樣本,根據式(1),將n個電池單元的SOC按大小排序,將SOC最大的數據定義為類1 的中心μ1,將SOC最小的數據定義為類2 的中心μ2,SOC計算方法采用安時積分法,如式(2)所示,先根據鋰電池特性SOC-OCV曲線查表得到初始荷電狀態SOC0,根據采樣的輸出端電流,對時間求積分并除以電池額定容量C得到電池單元的實時荷電狀態SOCn;

(2)計算所有電池單元的荷電狀態SOCn和μ1、μ2的距離Jni,根據式(3)計算類1 和類2 內各點到μ1、μ2的距離平方和,再根據式(4)判斷各個點SOC與類一和類二中心點的關系rni,其中j=1,2,i≠j;

(3)分類完成,將μ1、μ2刷新,根據式(5)對同一類電池的SOC求算數平均值,得到新聚類中心
(4)終止條件判斷,當各個電池單元的類別關系rni不再發生變化,停止迭代并輸出各個電池單元所屬的類別。
2.2 均衡控制實現步驟
等能量冗余均衡是傳統的均衡控制策略,對于n個電池的系統,根據電池電量大小判斷冗余組合,選擇m個電池參與放電(n>m);一般采取恒定冗余度n-m,每釋放一定電量,切換一次開關組合,當電池組的電量極差小于閾值,則停止開關切換,均衡結束。圖4 為均衡控制實現流程,根據鋰電池冗余均衡的初始SOC不一致情況,采用K-means 聚類算法進行重組配對,選取6 個鋰電池冗余均衡單元,數據為每個電池單元的SOC值;類別設置為2,結合等能量均衡控制對聚類算法得到的結果,對電池單元充放電,當單片機計算判斷釋放θ電量,允許一次開關切換。具體的均衡算法步驟如下:
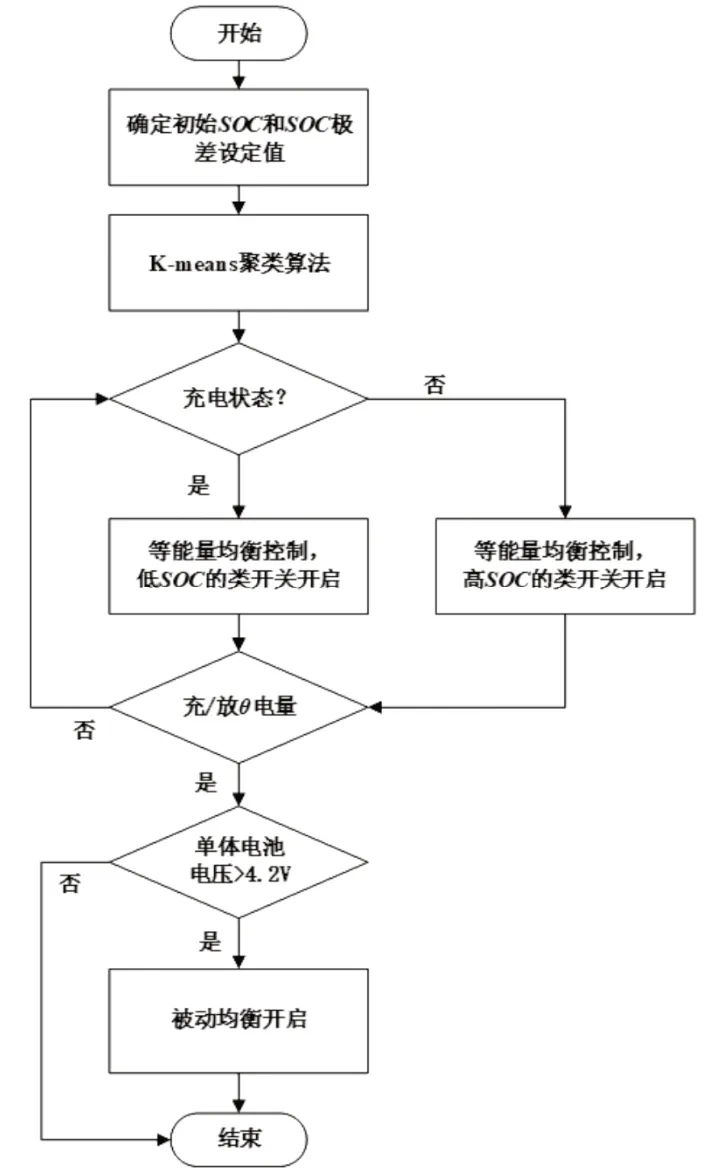
圖4 冗余均衡的K-means算法流程圖
步驟一,確定初始條件,鋰電池的SOC是反映鋰電池組電量多少的主要因素,為了提高均衡速度,選取6 個電池單元的SOC為聚類數據,每個電池單元的SOC數值隨著開關切換和充放電過程變化,以SOC極差為均衡判據,式(6)為SOC極差定義;

步驟二,開啟均衡控制,充放電采用等能量控制,當系統放出θ 電量,允許開關切換狀態,根據K-means 聚類算法得出的類別,分別給各個電池單元驅動信號、關斷信號,放電時,μ1類的電池單元先打開開關,使得電池單元接入并開始放電,μ2類別的開關關閉,高SOC的電池單元先進行放電,充電時,μ2類的電池單元先打開開關接入并開始充電,μ1類別的開關關閉,高SOC的電池單元先進行充電;
步驟三,閾值判斷,每完成一次等能量均衡控制,計算實時的SOC極差、單體電池電壓,當SOC極差小于設定閾值時,終止開關切換,并將6 個單元電池全部接入,使得全部電池單元參與放電并不再參與開關切換,當電池單體電壓小于設定閾值時,終止開關切換并將所有電池單元全部旁路,使得全部單元停止參與充放電,當電池單元電壓大于閾值時,高電壓的單體電池開始被動均衡放電;
步驟四,結束條件判別,放電模式時,當電池單元中電量最小的電池電量小于0 時,停止所有電池放電;充電模式時,當電池單元中所有電池SOC大于99%時,停止所有電池充電。
3 實驗結果分析
3.1 實驗設計
圖5 為本文實驗裝置圖,實驗平臺由電子負載、電源板、18 串鋰電池組、控制芯片為M031SD2AE 的主電路板和上位機組成。均衡實驗對象為18 節額定容量為2 200 mAh 的三洋公司18650 單體電池,電池單體滿電量電壓為4.2 V,下限電壓為3 V。實驗采取2.2 A 放電工況,每三串電池為一個電池單元,電池單元1~6 的初始SOC分為離散和非離散兩種情況,定義初始電池非離散狀態B1~B6 的SOC分別為82%、83%、85%、80%、86%、88%;電池離散狀態B1~B6 的SOC分別為72%、83%、75%、80%、86%、88%;實驗按均衡程度分為5%極差和0.5%極差兩種;定義5%極差、非離散,5%極差、離散,0.5%極差、非離散和0.5%極差、離散為工況一~四。

圖5 實物裝置圖
在四種工況下,分別使用傳統的等能量控制算法和本文提出的K-means 聚類均衡策略在實驗平臺上進行均衡,共八組實驗。圖6~9 為等能量冗余均衡在四種工況下的波形圖,圖10~圖13 為K-means 聚類均衡控制在四種工況下的波形圖。以圖6 為例,B1~B6 分別為6 個電池單元的放電曲線,可以看出在200 s 時,所有電池單元均接入參與放電,標志均衡完畢,開關次數最多的是B4,共4 次,定為綜合的最大開關次數。

圖6 非離散、5%設定極差等能量均衡
具體實驗步驟為:(1)將單體電池拆下,每節電池單獨以1C充電,電池電壓達到4.2 V 則停止充電;(2)電池靜置1 h;(3)對單體電池標號并分別放電到實驗預設SOC對應的電壓,停止放電并靜置1 h;(4)將電池裝回電路板上,在電子負載設置恒流2.2 A 放電;(5)在MCU 內設置程序為K-means 均衡算法,通過PuTTY 軟件和電腦實時通訊,記錄均衡過程1~6 個電池單元的SOC、開關狀態和均衡時間;(6)當PuTTY 顯示沒有開關再進行切換,判斷均衡過程完成,接入全部電池單元參與放電,不再切換開關狀態;(7)統計均衡過程各個時間段的6 個電池單元的SOC、總開關切換次數和均衡結束時間;(8)同步驟1~7,完成等能量均衡的實驗,取冗余個數為1。
3.2 實驗結果與分析
圖6 和圖10 為非離散、極差5%時實驗圖形,前者通過4次切換開關組合在200 s 完成均衡,均衡過程始終為一個電池單元冗余,后者通過切換4 次開關組合在140 s 完成均衡,均衡過程冗余個數均為3;圖7、11 為在離散、極差5%時實驗圖形,前者通過27 次切換開關組合在725 s 完成均衡,均衡過程始終為一個電池單元冗余,后者通過16 次切換開關組合在425 s 完成均衡,均衡過程冗余個數在4、3 和2 之間切換,最少的時候2 個電池單元參與放電;圖8、12 為非離散、極差0.5%時實驗圖形,前者通過22 次切換開關組合在725 s 完成均衡,均衡過程始終為一個電池單元冗余,后者通過10 次切換開關組合在307.5 s 完成均衡,均衡過程冗余個數始終為3;圖9、13為離散、極差為0.5%時實驗圖形,前者通過33 次切換開關組合在1 400 s 后完成均衡,均衡過程始終為一個電池單元冗余,后者通過20 次切換開關組合在600 s 完成均衡,均衡過程冗余個數在4、3、2 之間切換,在450 s 后始終保持冗余個數為3,最終達到均衡。

圖7 離散、5%設定極差等能量均衡

圖8 非離散、0.5%設定極差等能量均衡

圖9 離散、0.5%設定極差等能量均衡

圖10 非離散、5%設定極差K-means聚類均衡
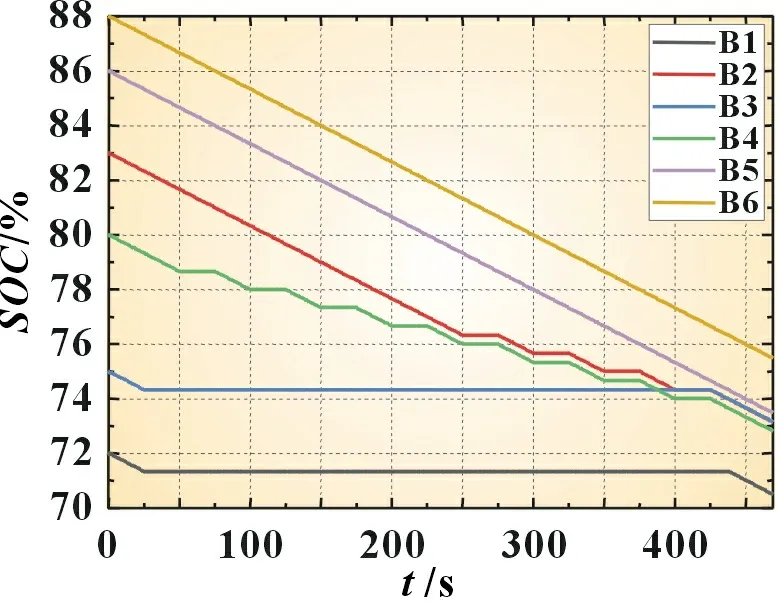
圖11 離散、5%設定極差K-means聚類均衡

圖12 非離散、0.5%設定極差K-means聚類均衡

圖13 離散、0.5%設定極差K-means聚類均衡
表1 總結了上述兩種均衡策略的實驗,對比等能量冗余均衡和K-means 聚類均衡在不同條件下的均衡時間和開關次數。本文采用的算法在工況一條件下,均衡時間縮短30%,開關次數改善不明顯;在工況二~四情況下,均衡縮短時間和開關減少次數改進效果顯著,均衡時間分別縮短41.4%、57.6%和57.1%,開關次數分別減少40.7%、54.5%和39.4%。從冗余個數上,等能量均衡控制始終保持一個電池冗余,離散情況下均衡效果較差;K-means 均衡控制可以根據離散度動態調整冗余電池的個數。總的來說,鋰電池冗余的Kmeans 聚類均衡在均衡時間和開關次數上是優于等能量冗余均衡的。

表1 均衡效果對比
4 結論
針對目前鋰電池冗余結構均衡時間慢、開關次數多的問題,本文以K-means 聚類算法為基礎,搭建鋰電池冗余均衡電路實驗平臺,提出了采用K-means 聚類算法的鋰電池冗余均衡控制策略。6 個電池單元在高離散、低極差設置、低離散和高極差設置四種工況下的實驗對比結果表明:本文提出的均衡策略具有良好的均衡效果,能在鋰電池電量較大離散情況下快速均衡,減少開關次數,特別是在高離散度、低極差情況下均衡時間縮短57.1%,開關次數減少39.4%。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55