車用動力電池全生命周期壽命預測方法
2022-07-01 09:23:14周雅夫劉邵勛孫宵宵黃立建
哈爾濱工業大學學報 2022年6期
關鍵詞:模型
周雅夫,劉邵勛,孫宵宵,黃立建,連 靜
(1.工業裝備結構分析國家重點實驗室(大連理工大學),遼寧 大連 116024;2.大連理工大學 運載工程與力學學部汽車工程學院,遼寧 大連 116024)
近年來,為應對傳統化石燃料枯竭和環境惡化等問題,鋰離子電池被廣泛應用于新能源汽車、航空航天、電網以及儲能等領域。鋰離子電池的老化程度極大地影響其供電設施的工作性能,若不能及時了解電池老化程度,電動汽車和儲能設施將無法正常運行。受限于現有技術,難以直接測量在役的鋰離子電池老化程度,因此建立準確的電池健康、RUL預測機制對于電池管理和梯次利用尤為重要。現階段較為常用的方法是建立模型來描述電池的老化行為[1-3]。
物理模型和經驗模型是現階段兩種主要的描述電池老化行為的方法,其均是通過數學語言描述電池的物理、化學或者數理關系建立電池容量、內阻或其他能表達電池特性的參數表達式。目前國內外對在汽車在役電池(電池容量80%以上)容量衰減的建模研究已經比較成熟,存在多種方法,具體包括:1)基于電池內部化學機理建立的模型,文獻[4-5]著重分析了鋰電池固體電解質膜(Solid electrolyte interface, SEI)隨著電池老化的溶解恢復的過程,建立了用于描述電池容量變化的機理模型,然而在鋰離子電池實際使用過程中,復雜的工作環境導致其老化過程呈現強非線性,此過程會增大固定參數的電池機理模型的預測誤差。2)通過等效電路模型的電池老化建模,文獻[6]利用電路元件建立了用于描述電池的等效電路模型(Equivalent circuit model, ECM),該模型以電池老化容量衰減與內阻之間的關系,從而以外推的方式精確預測出電池的RUL,文獻[7-8]通過采用了一種組合式的等效電路模型,找到了在電池衰老過程中關于電流和電壓的過渡方程表達式,文獻[9]分析了電池荷電狀態(State of charge, SOC)的動態變化過程,建立了線性模型實現了SOC的精確預測。3)通過大量電池衰減的實測數據建立經驗模型,該類方法一般能夠精確預測電池狀態,但受限于數據獲取條件,其廣泛應用往往需要結合相應的智能算法。文獻[10-11]通過分析電池的內部阻抗數據變化,建立電池阻抗變化的數據集,分別結合自回歸滑動平均模型(Autoregressive moving average model, ARMA)和人工神經網絡(Artificial neural network, ANN)等智能方法對電池RUL進行預測,文獻[12-14]是通過分析電池的容量衰減數據,采用了經驗二次多項式或指數函數作為電池容量衰減模型,并利用粒子濾波方法改變觀測方程參數對電池容量進行預測,文獻[15]從電池容量保持率的角度對電池壽命分析,用高斯函數總結了其容量與剩余壽命的關系,同時利用外推法實現了RUL的預測,文獻[16]提出的貝葉斯模型用于衡量衛星鋰電池二元性能以及壽命數據,文獻[17]將數據驅動利用到了電池的壽命預測,文獻[18-19]采用了機器學習算法識別電池老化實現電動汽車電池壽命的優化,文獻[20]通過建立單粒子模型分析鋰離子電池老化過程,文獻[21-22]則通過分析電池充電過程中數據變化,建立經驗模型預測電池壽命。現有對電池RUL的預測方法多集中于對在役電池的預測,鮮有預測退役動力電池的RUL相關的文獻,為實現電池剩余價值的最大化利用,本文提出了針對車用動力電池的全生命周期壽命預測方法。
本文通過分析電池全壽命周期的容量衰減實驗數據,在傳統經驗模型的基礎上進行改進融合,提出了用于表征電池容量與充放循環關系的多系數模型,利用多組電池容量衰減數據驗證該模型的表征能力。采用粒子濾波思想通過不斷更新模型參數以實現對電池的容量預測和追蹤,從在役電池(容量衰減到80%)和退役電池(容量80%衰減到50%)兩個方面進行實驗,從而實現對車用動力電池全生命周期的壽命預測。
1 模型的構建
1.1 基礎經驗模型的分析驗證
目前,二階指數函數和二次多項式是被廣泛用于電池容量衰減預測的基本經驗模型[23],本文首先對傳統二次多項式模型進行改進,原二次多項式經驗模型的數學表達式為
C=σ1×k2+σ2×k+σ3
(1)
式中:σ1、σ2、σ3為模型中的待定參數,k為電池循環次數,C為電池容量。相比于傳統二次多項式,式(1)對電池容量衰減有更強的表征能力,如圖1、表1所示,故本文采用三次多項式用于模型重組。
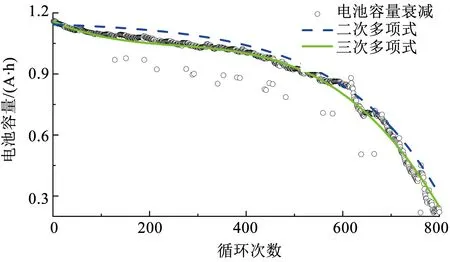
圖1 經驗模型擬合對比圖Fig.1 Fitting results of improved model

表1 擬合效果對比Tab.1 Comparison of fitting effects
三次多項式和二階指數函數經驗模型的表達式分別為:
A:
C=α1×n3+α2×n2+α3×n+α4
(2)
B:
C=b1×exp(b2×n)+b3×exp(b4×n)
(3)
式中:C為電池計算容量,n為電池在標準充放電條件下的循環次數,α1,α2,α3,α4,b1,b2,b3,b4為模型中的參數。
電池容量預測模型是實現電池RUL預測的基礎,其對電池全生命周期容量的擬合效果直接關乎預測是否準確。本文中利用相關系數(R2)與均方跟誤差(Root mean squared error, RMSE)表征模型與容量衰減曲線之間的匹配度。量綱一的比值R2的計算方法如下:
(4)
式中:回歸平方和 (Sum of squares due to regression, SSR)為預測數據與原始實驗數據均值差值的平方和,總偏差平方和(Total sum of squares, SST)為原始實驗數據與數據均值差值的平方和,兩者關系如下式描述:
(5)

(6)
式中:ωi為每個預測點對應實際實驗值的權重,yi表征電池相應循環中的實測容量值。
相關系數(R2)是一種擬合效果的有效衡量工具。由式(4)可知,其取值范圍為[0,1],當R2越趨近于1,表示模型變量越能合理解釋原始數據,該模型的數據擬合結果置信程度越高。RMSE是一種表征兩組數據偏差的有效工具,其表達式為
(7)
圖2(a)~圖2(d)分別為每100次循環中,模型A和B計算電池容量數據與A組電池實際數據的相關系數與均方根誤差的變化圖。
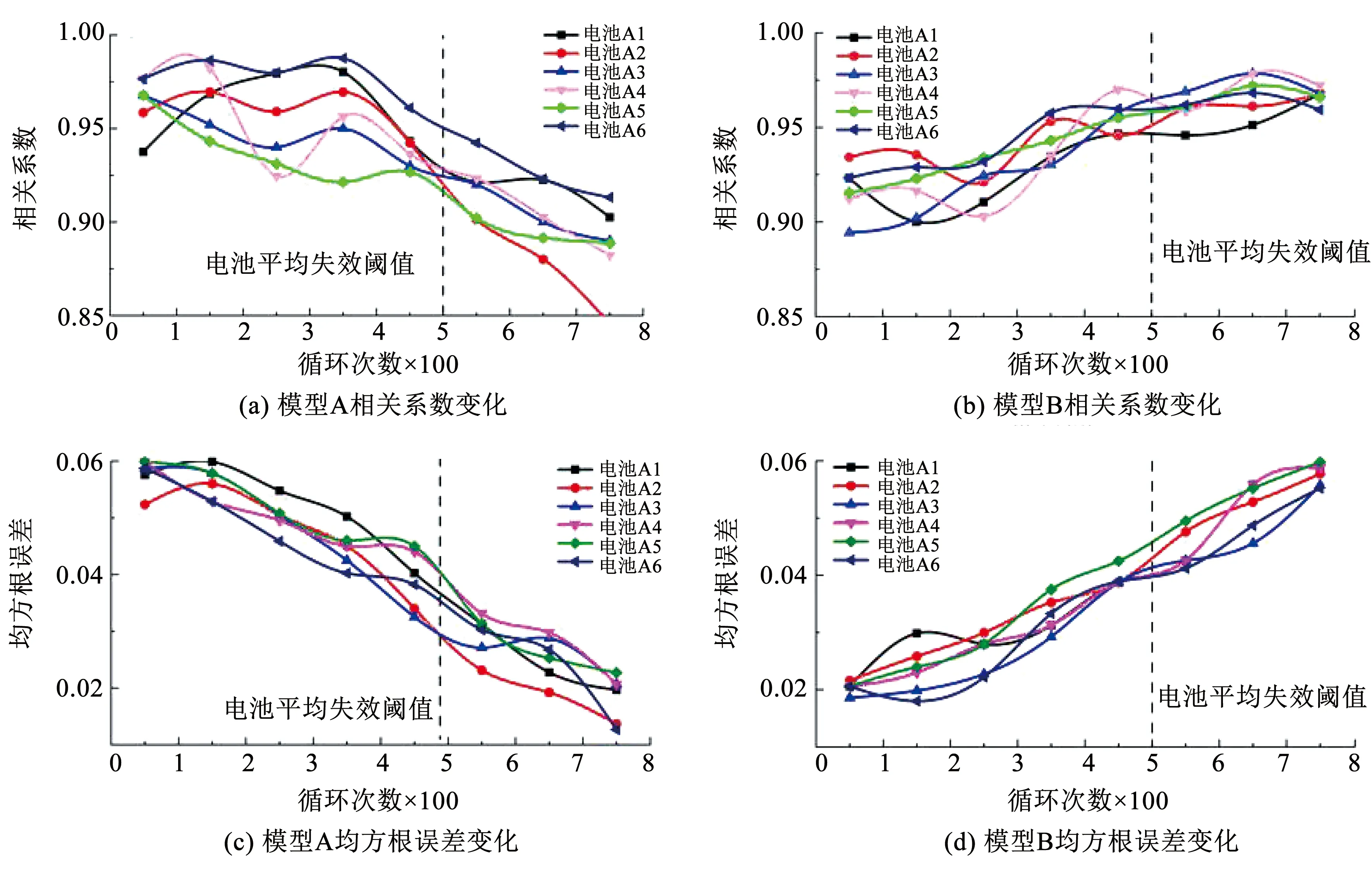
圖2 每百次循環中的模型A,B對電池數據匹配情況Fig.2 Matching results of model A and model B in every 100-cycle
從每百次循環的R2和RMSE值的變化可以看出,模型A,B對A組電池全局容量擬合效果不是恒定的,其整體呈變化趨勢。為保證預測模型對于電池容量衰減有全局穩定的擬合效果,實現對電池全生命周期的容量預測和追蹤,本文將對模型A,B拆分重組以構建新模型。
1.2 新模型的選型
在模型A中,α4為常數項,其取值接近電池容量的標稱容量值,該模型本質上是通過前3項(α1×n3+α2×n2+α3×n)的取值變化使模型A的計算結果收斂于實際的電池容量;在模型B中,b3×exp(b4×n)函數值遠大于b1×exp(b2×n)的值,其原理類似于模型A。
本文采取的方法是將模型中的變量和常數項進行區分,根據其占模型結果的比重進行重組得出新的組合模型,并根據實際的擬合結果以及預測精度判斷新組合模型的應用效果。拆分重組后的4種模型的表達式如下:
C:C1=α1×n3+α2×n2+α3×n+b3·exp(b4·n)
(8)
D:
C2=b1·exp(b2·n)+α4
(9)
E:
C3=α1×n3+α2×n2+α3×n+b1·exp(b2·n)
(10)
F:
C4=b3·exp(b4·n)+α4
(11)
式中:模型中的C均為模型計算電池容量,n為電池循環次數。
在表2中,模型C和模型D對實測數據的表征效果優于模型E和F,結合表1數據可以得出模型C, D在吻合度上的優勢。僅從對數據的表征能力上足以體現組合模型C的優點,所以本文增加了不同模型對電池RUL的預測結果以篩選兩組組合模型。
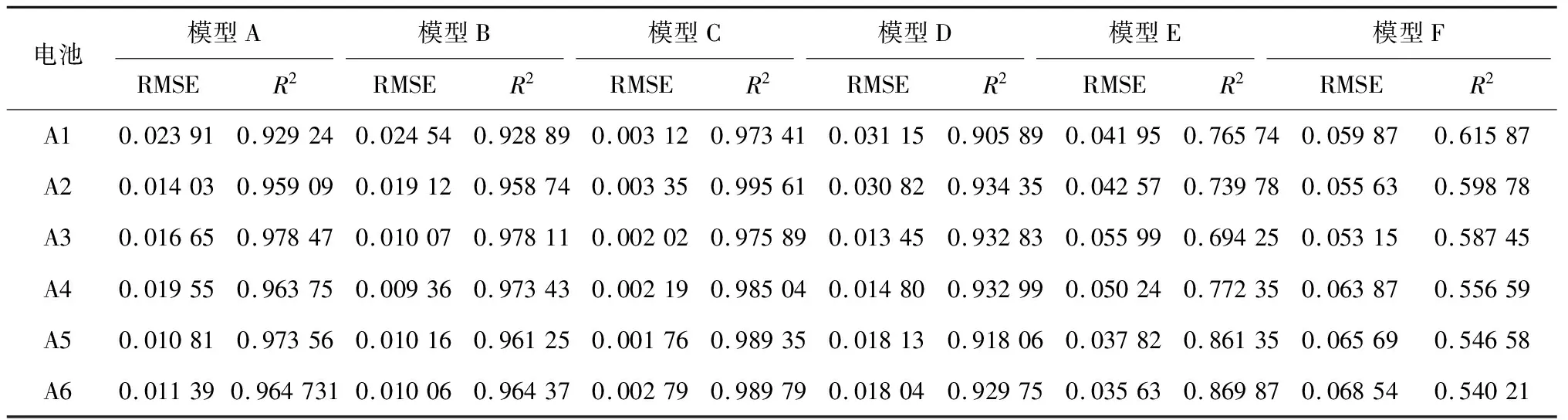
表2 模型匹配度對比Tab.2 Comparison of model results
2 粒子濾波對參數的修正
在實際應用中,電池容量衰減模型不能充分體現結果的可靠性,由固定參數的容量衰減模型獲得的預測結果難以具有代表性。為保證電池容量衰減預測的準確性,模型的參數還需要新的算法實現參數的不斷更新以保證自身魯棒性。PF因其非參數化、非高斯化等特點被廣泛應用于解決此類非線性問題[24-25]。本文以觀測模型為基礎,依靠PF思想修正觀測模型參數,實現不同種類電池容量的精確預測。
粒子濾波作為蒙特卡洛仿真的近似貝葉斯濾波算法,基于計算粒子的均值精確實現后驗概率估計 [26-28]。該方法利用離散的粒子采樣均值計算代替積分計算以獲得系統預測結果。
2.1 計算步驟
由模型C例,即容量預測時認為其容量表達式為:
Z(κ)=ν1×κ3+ν2×κ2+ν3×κ+ν4·exp(ν5·κ)
(12)
式中:Z為預測電池的容量,κ為電池在標準協議下的充放電實驗循環次數,模型的計算容量Z和系統的狀態變量ν1,ν2,ν3,ν4,ν5含有未知方差的白噪聲。表3是模型C,D預測實驗過程中各個參數的初始值。
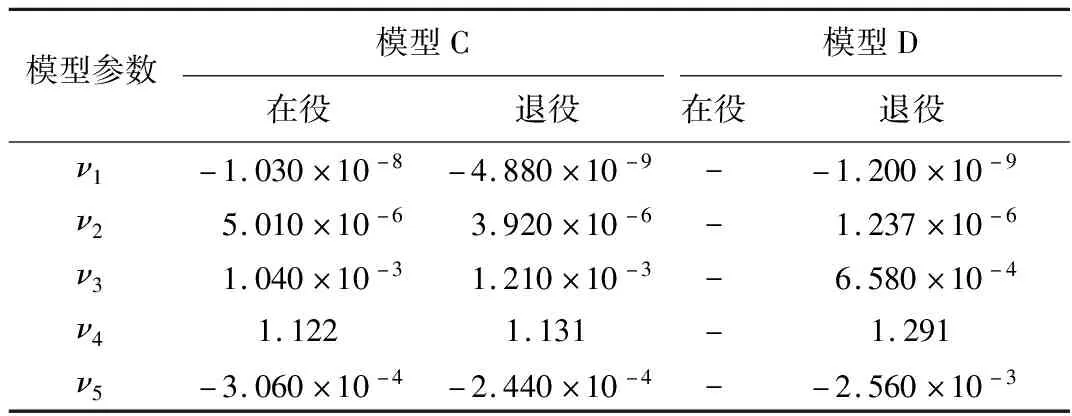
表3 不同電池預測方程初始值Tab.3 Initial values of parameters in prediction function
式(12)中需要估計的參數可表達為
V(κ)=[ν1(κ),ν2(κ),ν3(κ),ν4(κ),ν5(κ)]
(13)
此時的狀態方程為:
ν1(n+1)=ν1(n)+Wν1(n),Wν1~N(0,M)
ν2(n+1)=ν2(n)+Wν2(n),Wν2~N(0,M)
ν3(n+1)=ν3(n)+Wν3(n),Wν3~N(0,M)
ν4(n+1)=ν4(n)+Wν4(n),Wν4~N(0,M)
ν5(n+1)=ν5(n)+Wν5(n),Wν5~N(0,M)
(14)
Q(κ)=ν1×κ3+ν2×κ2+ν3×κ+
ν4·exp(ν5·κ)+ζ(κ)
(15)
2.2 重要性采樣
首先根據p(Vκ|Q1∶κ)狀態方程得出p(Vκ|Q1∶κ-1)的值,即根據狀態方程κ時刻的取值,配合過程噪聲生成系統在κ+1時刻的狀態。由于過程噪聲的隨機性,系統在κ+1時刻的狀態可以被分布成大量的采樣,此時這些采樣點組成的數集可以被稱為粒子集。
2.3 校正階段
在完成粒子集的設定后,其更新公式如下:
(16)

對所有的粒子校正環節后,進行歸一化權值操作。式(17)為第κ充放循環中粒子i的權重取值大小。
(17)
2.4 重采樣階段
重采樣過程中,粒子的保留或去除取決于其自身權值大小。系統的真實狀態V(κ)在依據權值大小對粒子取舍后獲得。
重采樣后的粒子可以代表電池系統容量真實的概率分布,根據此概率分布,結合基于序列的后驗期望估算方法,可以得到下一時刻電池容量的后驗期望I(Gκ)。
(18)
在下一輪濾波中,直接將重采樣后的粒子輸入到狀態方程中,就能夠獲得粒子集對應的電池容量衰減量的觀測集,即新一輪濾波的粒子集。
最后,在完成了設定濾波階段的循環次數后,需預測的第κ+1時刻的電池容量的表達式為
(19)
對于退役電池的壽命預測,采用的方法是將測量的狀態向量以及其當前的后驗分布P(Vn|Q1∶κ)投射到所有可能的未來路徑當中,每個容量的軌跡分布由相應的模型表達式計算,當前循環次數的容量分布計算以及RUL期望值為:
(20)
(21)
3 電池壽命預測驗證
3.1 試驗中的充放電條件
參與實驗的電池為A,B兩組不同容量的電池,所有電池的參數見表4。其在實驗中均采用恒電流充放電法;首先使用0.5 C電流充電,直至被測電池到達上截止電壓,隨后保持電池電壓不變,充電電流將緩慢降低到0.05 A以下;當電池放電時,恒流放電至電壓降為2.7 V,從而實現電池充放電的一次循環。圖3為電池A1,B1的容量衰減圖。
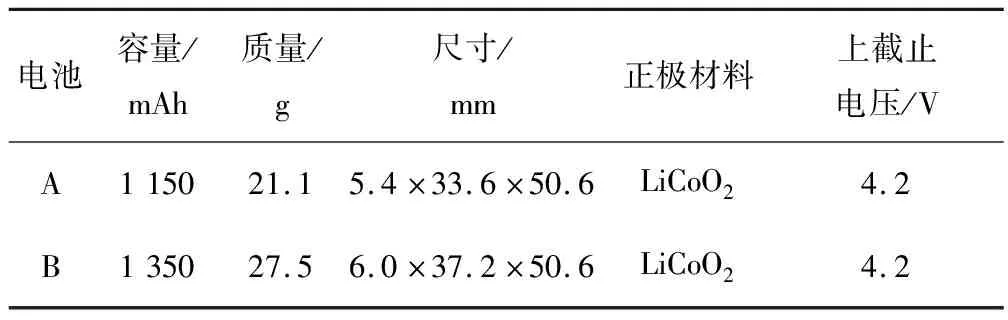
表4 電池各項參數Tab.4 Battery parameters
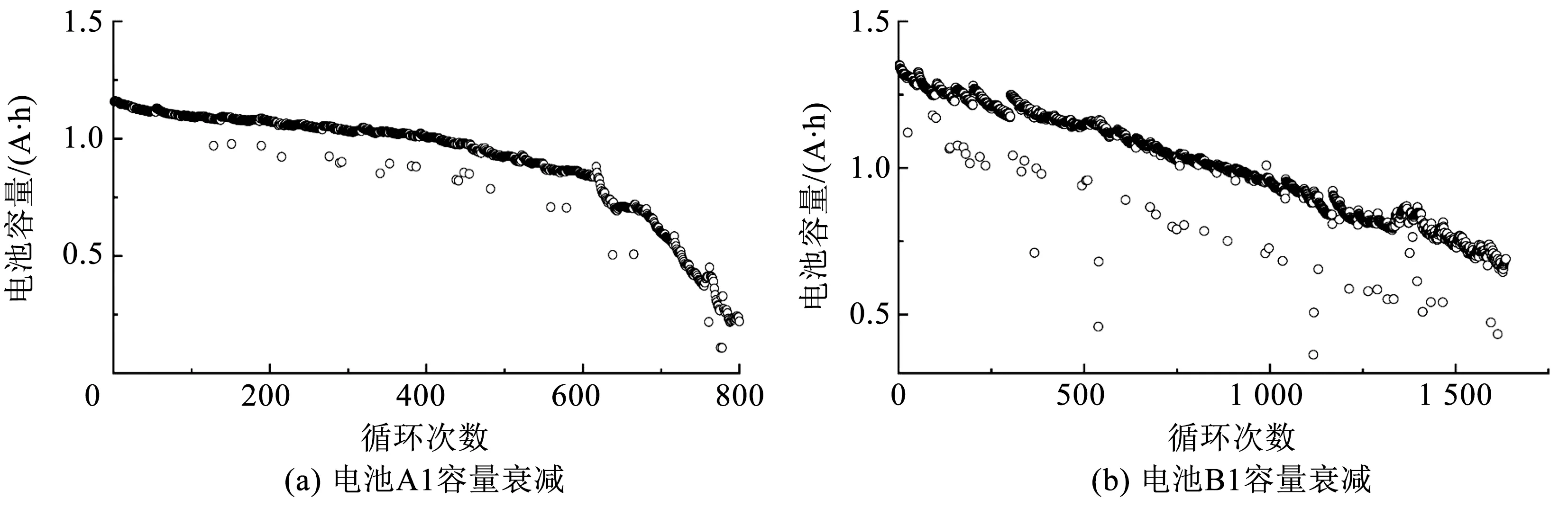
圖3 電池A1,B1容量衰減實測圖Fig.3 Capacity attenuation of batteries A1 and B1
3.2 電池壽命預測驗證
本文首先將電池(A5,A6)作為在役電池數據集對粒子濾波容量預測算法以及容量衰減模型進行驗證,選取電池充放循環試驗的前300次,即電池的壽命衰減到為其正常壽命的1/3為訓練階段,利用后續階段作為電池預測階段并對比模型C和D的濾波預測結果。預測精度的檢驗標準定為預測誤差和標準差(Standard deviation,STD)。標準差用于衡量預測值與實際值的偏差,當RUL預測結果在置信區間內時,一個小的STD值代表著較窄的RUL預測區間,也就代表著較高的置信水平。
各模型的預測結果如圖4所示,以在役電池A5的容量衰減預測結果為例:選取電池標稱容量的80%為失效閾值,觀測方程為模型A和D時的預測結果相似,兩者預測動力電池A5容量到達設定的失效閾值時間均提前與實際測量值約30個標準充放循環;觀測方程為模型B時,預測電池A5到達設定的失效閾值時間點晚于實測值約40個充放循環;觀測方程為模型C時,預測電池A5與實測值基本吻合,預測失效時間滯后于實測值3個充放循環。在表5中,+為預測電池失效時間滯后;-為預測電池失效時間提前;STD為預測結果與容量真實值的偏差。由表5中的兩組電池容量衰減預測結果可知,模型C的預測結果STD值分別為1.03%和0.80%;平均誤差均為0.9%。其整體預測曲線較接近原始電池容量衰減數據。
綜合圖4以及表5、6的結果分析,在原始經驗模型A、B和重組觀測模型C、D中,模型C的預測結果無論是整體逼近真實值效果,還是最后的失效時間預測均大幅度高于其他參與對比模型,故選擇模型C進行退役電池壽命預測,將其預測結果與傳統經驗模型A和B的預測結果進行比較,驗證本文提出模型對于電池在役階段和退役階段均具有較高的預測精度。

表5 4種模型預測結果總結Tab.5 Summary of prediction results of four models
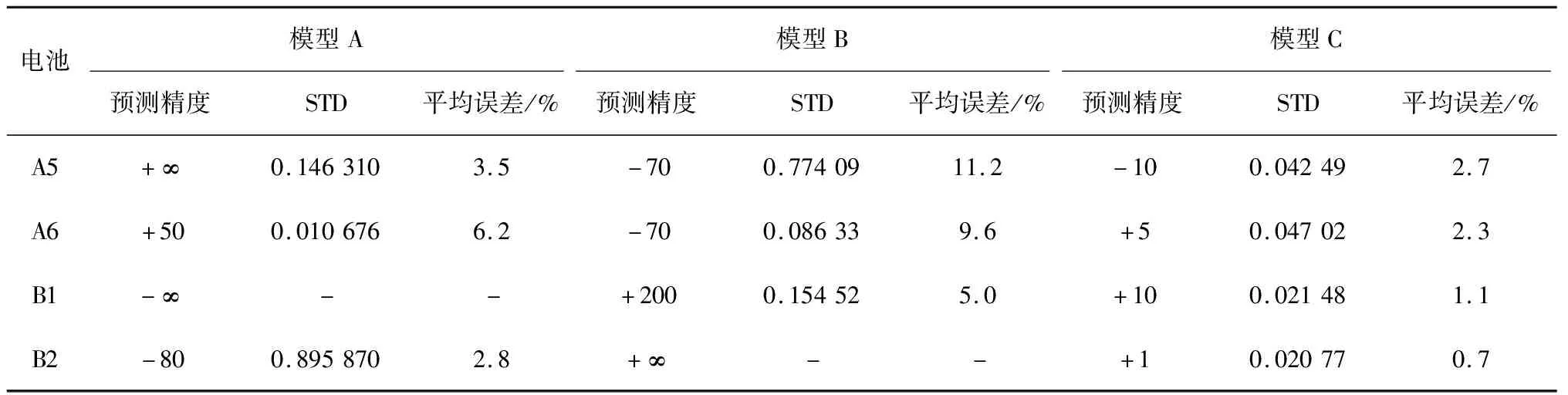
表6 退役電池預測結果總結Tab.6 Summary of prediction results of retired batteries
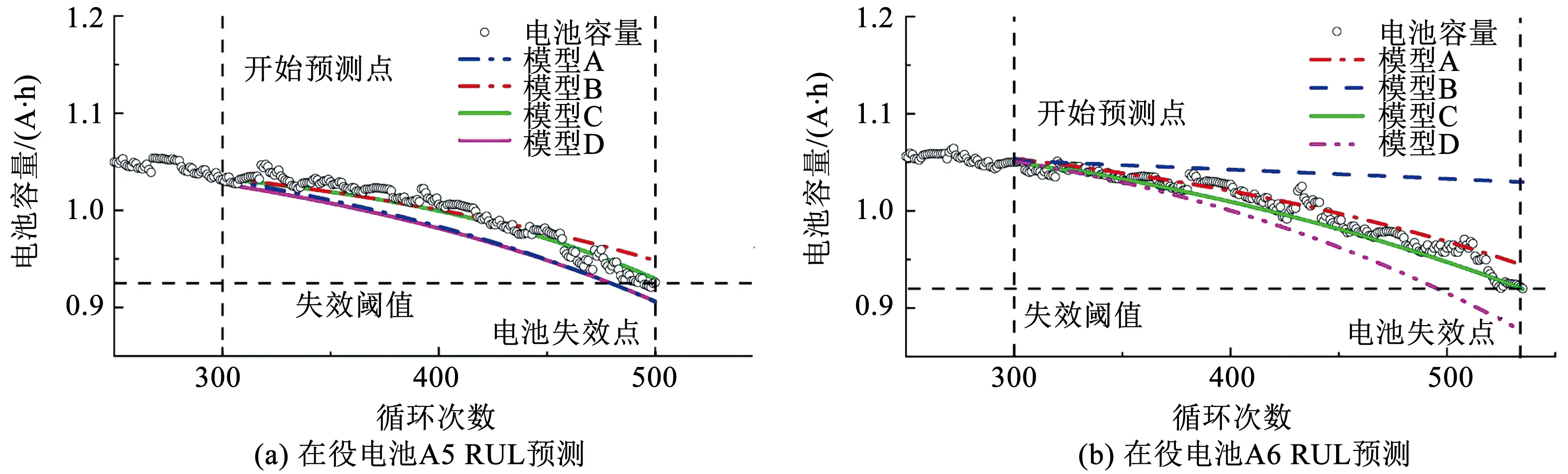
圖4 在役電池A5,A6 RUL預測結果Fig.4 RUL prediction results of in-service batteries A5 and A6
動力電池A5, A6, B1和B2的退役階段容量衰減預測結果如圖5所示,圖6是模型C對動力電池A5,A6和B1,B2的退役階段的容量預測過程中系數的變化曲線。
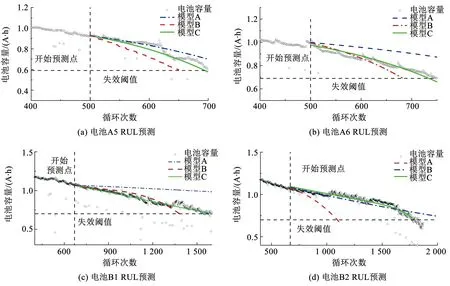
圖5 3種模型退役電池RUL預測結果對比Fig.5 Comparison of RUL prediction results of retired batteries by three models
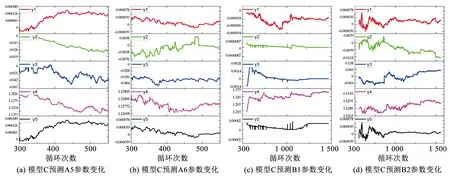
圖6 退役電池預測系數變化Fig.6 Parameters changes in retired batteries
以模型C為例,觀測方程為模型C時,電池A5到達失效閾值的預測時間提前實驗測量失效時間約10個充放循環;電池A6到達失效閾值的預測時間稍滯后于實驗測量失效時間約5個充放循環,且兩組預測誤差均較低,分別為2.7%和2.3%;在對電池B1退役階段容量衰減預測中,到達失效閾值預測時間滯后于實測數據約10個標準充放循環;對電池B1退役階段容量衰減預測中,其預測曲線與實測曲線貼合程度較好,到達失效時間預測值稍滯后于實測值1個標準充放循環。電池B1和B2的預測誤差分別為1.1%和0.7%。從實驗結果可知,相比于傳統多項式模型和指數函數模型,采用模型C為觀測方程對不同類別的電池容量衰減預測精度均有較大的提升,該結果證明了該組合模型用于預測電池容量衰減的有效性。
4 結 論
1)本文提出的融合模型吸收了現有經驗模型的優點,對電池全生命周期容量衰減具有更強的保證能力,通過對不同電池容量衰減數據吻合度分析證明了該模型的可行性和有效性。
2)在基于粒子濾波的在役電池容量預測實驗中,該模型能對在役電池實現精確的壽命預測,預測誤差小于2%,誤差均值小于1%。
3)該方法不僅適用于在役動力電池壽命預測,在研究較少的退役電池壽命預測實驗中,對不同容量的電池壽命預測也具有較高的精度,預測誤差小于5%,誤差均值小于3%,有助于電池梯次使用行業的發展。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19