仿海豹胡須陣列檢測水中運動目標尾流特征
2022-07-01 09:23:24孔德義熊玉林
哈爾濱工業大學學報 2022年6期
王 森,徐 賀,孔德義,熊玉林
(1.中國科學院 合肥物質科學研究院智能機械研究所,合肥 230031;2.中國科學技術大學 信息科學技術學院,合肥 230026;3.中國科學院 種子創新研究院,北京 100101)
水下航行器在航行時,會在經過的區域產生尾流。尾流的區域特性與水下航行器的幾何尺寸、軌跡方位等密切相關。因而可以通過檢測并分析水下航行器的尾流特征參數,來估算水下航行器的位置、航向、特征長度大小等信息[1-3]。當前常用的尾流檢測方法主要有:聲學檢測、光學檢測、遙感檢測等。聲學檢測探測距離遠,但在地形復雜的淺海海域,水下混響等會對聲學檢測產生較大的干擾[4]。光學檢測方向性好,靈敏度高,但是激光在水體中損耗程度高[5]。遙感檢測可在一定高度對廣泛區域進行檢測和搜索,但是難以實現對深水層目標的探測[6]。隨著現代水下航行器的隱身技術、降噪技術的發展以及易受實際水下復雜自然環境干擾和人工干擾的影響,使得傳統聲學、光學等尾流探測技術作用十分有限,因此對于水下航行物的探測需要研究新的方法和途徑。
國外有專家研究了海豹在無法通過視覺和聽覺來感知外界信息的情況下,仍然可以使用胡須來探測獵物的蹤跡。如Schulte-Pelkum 等[7]開展了大量實驗,證實海豹在眼睛和耳朵均被蒙住的情況下,可以通過胡須捕捉水流細微擾動,從而實現對獵物的定位和跟蹤。此后,圍繞海豹胡須的作用機理,Fish等[8]發現海豹胡須的橫截面近似為橢圓形,并且沿其軸向具有重復的波峰波谷分布。Hanke 等[9]基于仿真和粒子成像速度分析技術,發現海豹胡須特殊的幾何形態有利于減少自激振動。Beem 等[10-11]基于海豹胡須特殊的幾何形態設計了單根水中壓阻傳感器,提高了傳感器檢測精度。此外,他們還利用該傳感器感知迎流,并對傳感器測得的振幅和偏角進行分析,從而實現對流速和流向的測量。Kottapalli等[12-13]同樣模仿海豹胡須的幾何形態,研發了微機電系統(Micro-electro-mechanical system,MEMS)壓電傳感器。相比于圓柱狀傳感器,該傳感器具有更高的靈敏度,可以探測到流速低于193 μm/s的擾動。然而,目前對海豹胡須的研究和應用主要集中在幾何形態分析及提高單根傳感器的檢測精度等方向,通過傳感器陣列來綜合感知尾流特征的研究較少。本文結合海豹胡須感知尾流機理,設計了一種模仿海豹胡須探測的尾流感知傳感器,并組成傳感器陣列對水中運動目標尾流特征進行檢測。
1 尾流感知傳感器設計
海豹胡須具有良好的流體探測能力,呈圖1(a)[8]所示的波浪起伏狀。海豹胡須內部組織主要為自體感覺皮質區,簡化結構如圖1(b)所示[14]。自體感覺皮質區主要包括兩部分,一部分為體外波浪起伏狀胡須,另一部分為體內感知竇體。
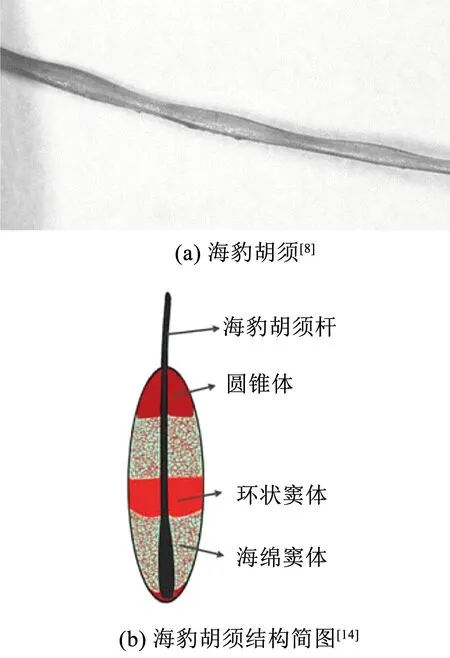
圖1 海豹胡須模型Fig.1 Seal whisker model
海豹胡須幾何形態可以看作具有橢圓形狀的橫截面,沿其長度伸展方向具有重復的波峰和波谷排列。以文獻[15]測量的尺寸為基礎,同時為充分獲取流場信息并結合現有加工條件,設計了一種尺寸放大10倍的胡須模型,該胡須模型采用3D打印技術及光敏樹脂材料制作。制作了具有4個波浪起伏狀周期、總長L=137.92 mm的胡須模型,如圖2所示。圖2(a)、2(b)為同一個胡須模型的不同方向視圖,圖2(a)為長軸方向的正視圖,圖2(b)為短軸方向的正視圖,其中胡須模型的長軸波峰Wa=10.50 mm,短軸波峰Wb=4.38 mm,長軸波谷Wk=8.32 mm,短軸波谷W1=3.56 mm,長軸方向與短軸方向上的波峰波谷截面中心之間的距離M均為17.24 mm。
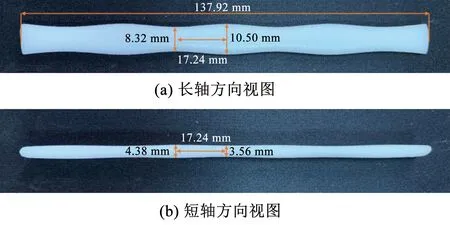
圖2 仿海豹胡須模型長軸、短軸視圖Fig.2 Long axis and short axis view of bio-inspired seal whisker model
模仿海豹胡須的尾流感知傳感器系統如圖3所示,主要包括Arduino處理器、運算放大器、柔性壓阻式敏感元件、胡須模型4部分。考慮到海豹胡須感知主要涉及到偏轉量的動態測量,采用柔性壓阻式敏感元件作為感知元件,通過運算放大器使壓阻元件的輸出信號與實際壓力值呈線性關系。其中柔性壓阻式敏感元件為Tekscan公司生產的A201薄膜壓力傳感器,測量范圍為0~4.4 N,厚度為0.203 mm,線性誤差<±3%,重復性<±2.5%,遲滯性<±4.5%,漂移<5%。該傳感器質量輕、厚度小、感測精度高,常用于工業、醫療觸力測量。
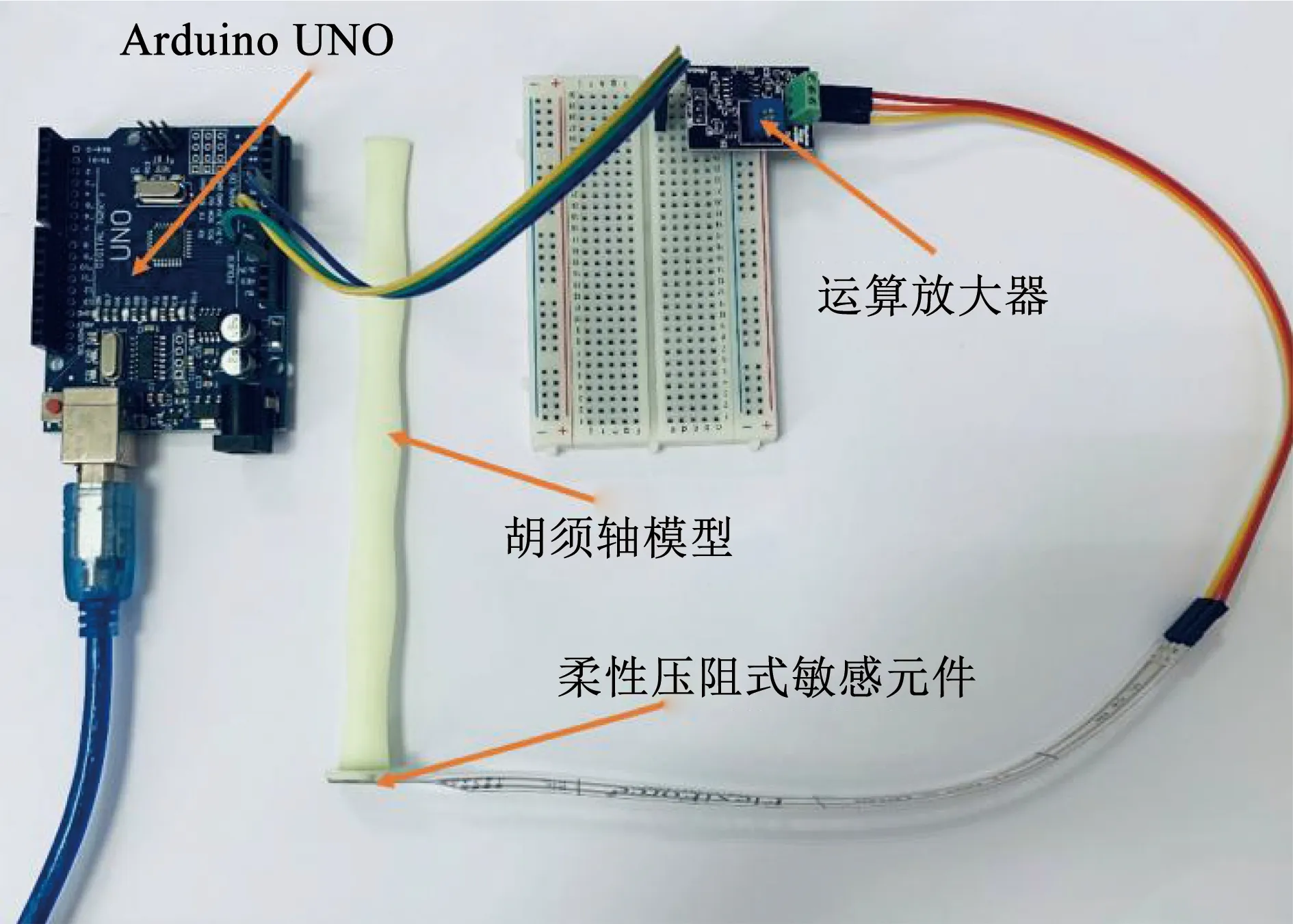
圖3 尾流感知傳感器系統Fig.3 Wake sensing sensor system
2 尾流檢測實驗方案
尾流檢測實驗平臺主要由傳感器支撐架、導軌支架等構成,圖4為尾流檢測實驗平臺示意圖。尾流檢測實驗在實驗室水槽中進行,水槽上方搭建了由步進電機驅動的移動滑臺,將導軌支架固定在移動滑臺上,傳感器支撐架在導軌支架牽引下實現水平方向運動,如圖5所示。胡須模型與壓阻元件采用納米聚氨脂(PU)膠凝合材料黏結,并固定于傳感器支撐架上。

圖4 尾流檢測實驗平臺示意圖Fig.4 Schematic diagram of wake detection experimental platform

圖5 尾流檢測實驗平臺Fig.5 Wake detection experimental platform
本實驗采用直徑D=4 cm的圓柱作為被測目標。為簡化實驗及避免尾流到達水槽壁面產生回波干擾,該被測目標與傳感器陣列同時以1.0 m/s的速度進行勻速直線運動。為使胡須模型自身產生的擾動降到最低,將胡須模型的長軸方向與運動方向保持一致,即夾角(胡須模型的長軸方向與運動方向之間的夾角)為0°。位于被測目標后方的9個傳感器組成3×3方形陣列,具體分布方式及編號如圖6所示。設定縱向與運動方向一致,與縱向正交方向為橫向。第1列傳感器(S11、S12、S13)分別位于被測目標正后方6、8、10 cm,第2列傳感器(S21、S22、S23)和第3列傳感器(S31、S32、S33)分別在橫向方向偏離2、4 cm。為將尾流可視化,在水槽中加入深色墨水(凌美公司的T52非碳素墨水),如圖7所示。圖7(a)為靜止狀態下的流場情況,無漩渦生成,圖7(b)為拖拽實驗條件下的流場情況,被測目標正后方有漩渦生成,漩渦中心均在運動軌跡兩側相距6.74 cm的范圍之內。根據尾流生成情況,結合傳感器陣列與被測目標的相對位置,得知S11、S12、S13、S21、S22、S23位于尾流區,S31、S32、S33位于非尾流區。胡須模型受到尾流作用時發生偏轉,使得壓阻元件產生形變,引起電阻發生變化,經電信號濾波放大后采集數據,從而獲取尾流特征信號。

圖6 傳感器陣列編號標注及相對位置示意圖Fig.6 Schematic diagram of relative positions of sensor array

圖7 尾流可視化Fig.7 Wake visualization
3 尾流檢測實驗數值仿真分析
本文模仿海豹利用胡須在靜水中對運動目標的尾流檢測,為便于仿真,考慮相對運動的等效轉換,仿真中設定流速分別為0.5、1.0、1.5 m/s的均勻來流,同時考慮到仿海豹胡須對尾流檢測的通用性,設定具有微小波動的非均勻流場情況。將被測目標及傳感器陣列作為相對靜止的參照物,仿海豹胡須陣列前方放置被測目標以用于生成尾流,各參數與實際尾流檢測實驗參數一致,即依照圖6標注及相對位置參數建立幾何模型。
3.1 網格劃分
在模擬尾流檢測實驗時,被測目標后方生成尾流,流動相對復雜,因此采用非均勻分布的網格劃分,靠近被測目標及仿海豹胡須陣列所在區域網格加密,如圖8所示。
3.2 邊界條件設定及數值求解方法
網格劃分之后對模型邊界進行如下設置:1)設定速度入口。均勻來流的流速設定分別為0.5、1.0、1.5 m/s,方向與出口垂直。非均勻來流中的微小擾動設定如圖9所示,在入口處增加一組直徑大小為0.02 m、間隔為0.05 m的圓柱陣列,入口設定為1.0 m/s的定常流,定常流經過圓柱陣列時會生成微小波動,從而形成非均勻流動。2)設定壓力出口。出口壓力為0 Pa,方向與出口垂直。3)其余邊界設定為無滑移壁面邊界。
考慮到有湍流漩渦的生成,為保證有較高的可信度和精度,采用RNGk-ε湍流模型進行求解。按照進口邊界對整個流場進行初始化,在計算過程中,為滿足模擬結果精度要求并保證計算效率,設定時間步長為0.01 s,所有殘差精度控制均為10-3。
3.3 仿真結果與討論
圖10為不同流場情況下的尾流速度場仿真云圖,速度梯度越大,則表示受尾流擾動越大。圖10中S11、S12、S13、S21、S22、S23附近尾流速度梯度較大,因此受尾流擾動影響較大。同樣,S31、S32、S33受尾流擾動程度較小。該仿真結果與實際拖拽實驗流場可視化結果相符合。
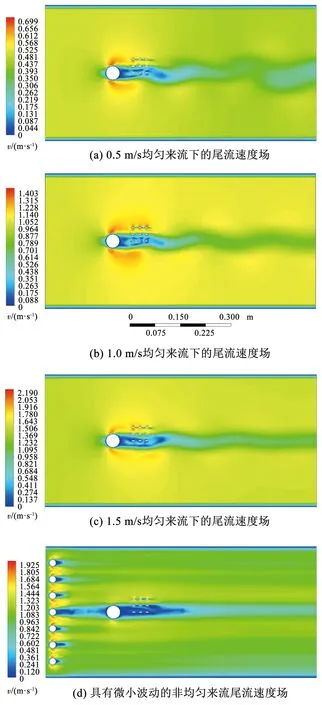
圖10 不同來流情況下的尾流速度場Fig.10 Wake velocity field under different incoming flow conditions
獲取仿真中S11的升力系數(lift coefficient),該升力系數可表示S11表面所受流體力情況,不同來流情況下的S11升力系數如圖11所示。在均勻來流及拋物線分布的非均勻來流情況下,S11受被測目標尾流場作用,升力系數隨時間變化,且波動具有一定規律性。而對于有微小波動的非均勻流情況下,S11受微小波動及被測目標尾流的疊加影響,升力系數波動無明顯規律。
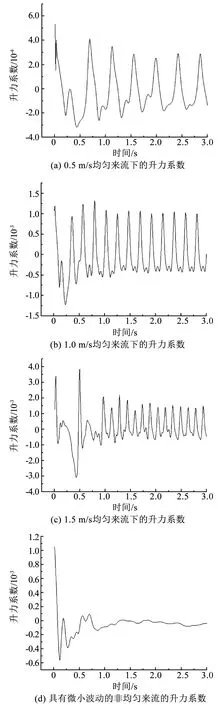
圖11 不同來流情況下的升力系數Fig.11 Lift coefficient under different incoming flow conditions
本實驗條件下被測目標產生尾流的特征參數之一是尾流漩渦脫落頻率[16]。被測目標的尾流漩渦脫落頻率f可以被測目標通過特征長度(直徑)D和斯托勞哈爾數St表示,計算方法如下[17]:
(1)
式中U為來流速度,在尾流的亞臨界區內St≈0.2。由式(1)可計算出均勻來流情況下的尾流漩渦脫落頻率。對于具有微小波動的非均勻流而言,可看作擾動信號(微小波動)及1.0 m/s均勻來流的疊加。具體理論及仿真計算的結果見表1。

表1 不同流場情況下的尾流漩渦脫落頻率Tab.1 Wake vortex shedding frequency under different flow fields
在不同流場情況下,理論計算得到的尾流脫落頻率與仿真計算得到的振動頻率相差均小于1.0 Hz,表明理論與仿真計算的結果具有良好的一致性。增加微小波動之后的頻譜分布中,有部分頻率低于2.0 Hz的信號,該信號為微小波動造成的擾動,但對理論計算得到的尾流脫落頻率5.0 Hz無明顯影響。由此可知,采用仿海豹胡須方法檢測尾流具有一定的通用性。
4 結果與分析
4.1 仿海豹胡須陣列尾流檢測實驗結果
為了排除導軌啟動時信號陡增現象(傳感器由靜止到運動時出現的信號陡增現象),只考慮信號的中間階段,表2所示為尾流信號檢測結果,為探究尾流對胡須的擾動程度,對每個傳感器5 s內測得的電壓信號取算術平均值獲得平均電壓值。圖12為傳感器陣列的電壓時域信號(黑色曲線,對應右側坐標軸電壓及頂部坐標軸時間)及經快速傅里葉變換之后對應的頻域信號(紅色曲線,對應左側坐標軸功率譜密度及底部坐標軸頻率)。圖12(a)、(b)黑色曲線為第1、2列傳感器測得的振動信號,由于受尾流擾動,電壓值在0~4 V。圖12(c)黑色曲線為第3列傳感器測得振動信號,電壓值均在0~0.7 V,振動幅度比尾流區低。對振動響應信號進行快速傅里葉變換獲得主頻以估算被測目標參數。第1列傳感器(被測目標正后方的傳感器)平均電壓值均比第2列傳感器(偏離運動方向的傳感器)、第3列傳感器(非尾流區的傳感器)平均電壓值高,即尾流擾動程度高。
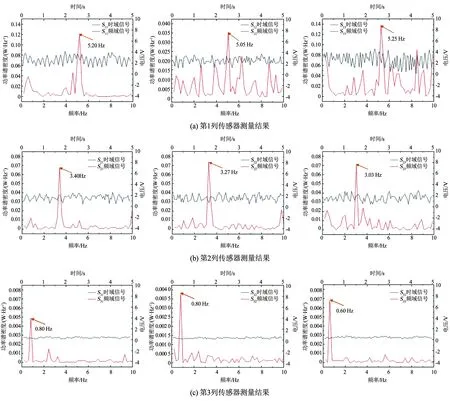
圖12 仿海豹胡須陣列的振動響應Fig.12 Vibration response of bio-inspired seal whisker array

表2 傳感器陣列測得的尾流信號結果Tab.2 Wake signal results measured by sensor array
4.2 尾流區的識別
如前文所述,作用在壓阻傳感器上的力與輸出的電壓成正比,即胡須模型受尾流擾動程度與電壓成正比。圖13為不同跟蹤距離的傳感器平均電壓值,橫坐標表示被測目標與傳感器的縱向跟蹤距離,縱坐標表示對應縱向跟蹤距離傳感器的平均電壓值。從圖13可以看出:尾流區中平均電壓值均在1.5 V以上,而非尾流區平均電壓值在0.5 V以下,尾流區的平均電壓值是非尾流區中的3倍以上。因此,在有無尾流情況下傳感器獲取的時域信號平均電壓值有明顯不同,基于平均電壓值的比較可以對尾流區和非尾流區進行區分,如果探測到尾流的平均電壓值高于某一閾值,則可以判斷此時位于尾流區。為保證明顯區分尾流區與非尾流區,將S33平均電壓值(非尾流區內最大的平均電壓值)2倍設定為判斷閾值,即本實驗中尾流區與非尾流區閾值設置為0.84 V,當平均電壓值高于0.84 V時則表明此時傳感器位于尾流區,否則位于非尾流區,從而檢測并判斷出是否有尾流存在。
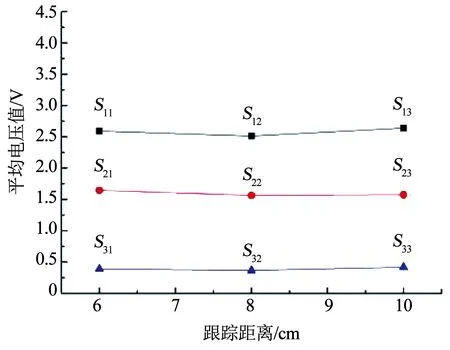
圖13 不同跟蹤距離的傳感器平均電壓值Fig.13 Average voltage value of sensors with different tracking distances
4.3 運動軌跡方向估算
圖14為偏離運動軌跡方向上的傳感器平均電壓值,用橫坐標表示胡須中心與被測目標中心之間的橫向距離,縱坐標表示每個傳感器測量的平均電壓值,其中Si1(i=1,2,3)表示縱向距離為6 cm的3個傳感器,即S11、S21、S31,同理Si2、Si3分別表示縱向距離為8 cm和10 cm的傳感器。
從圖14可以看出,尾流強度會隨著與偏離中心線距離的增加而逐漸衰減。當傳感器位于被測目標正后方時,平均電壓值最高,隨著偏離距離的增加,平均電壓值逐漸減小,在非尾流區中數值最小。由此可根據平均電壓值衰減程度來判斷傳感器與被測目標運動軌跡方向的偏移距離,即平均電壓值越高,則越接近被測目標運動軌跡中心。通過橫向排列的傳感器平均電壓值減小方向,獲取平均電壓值衰減的梯度方向,該梯度方向即為被測目標的大致運動軌跡方向,從而可以實現對被測目標的運動軌跡方向估算并進行跟蹤。
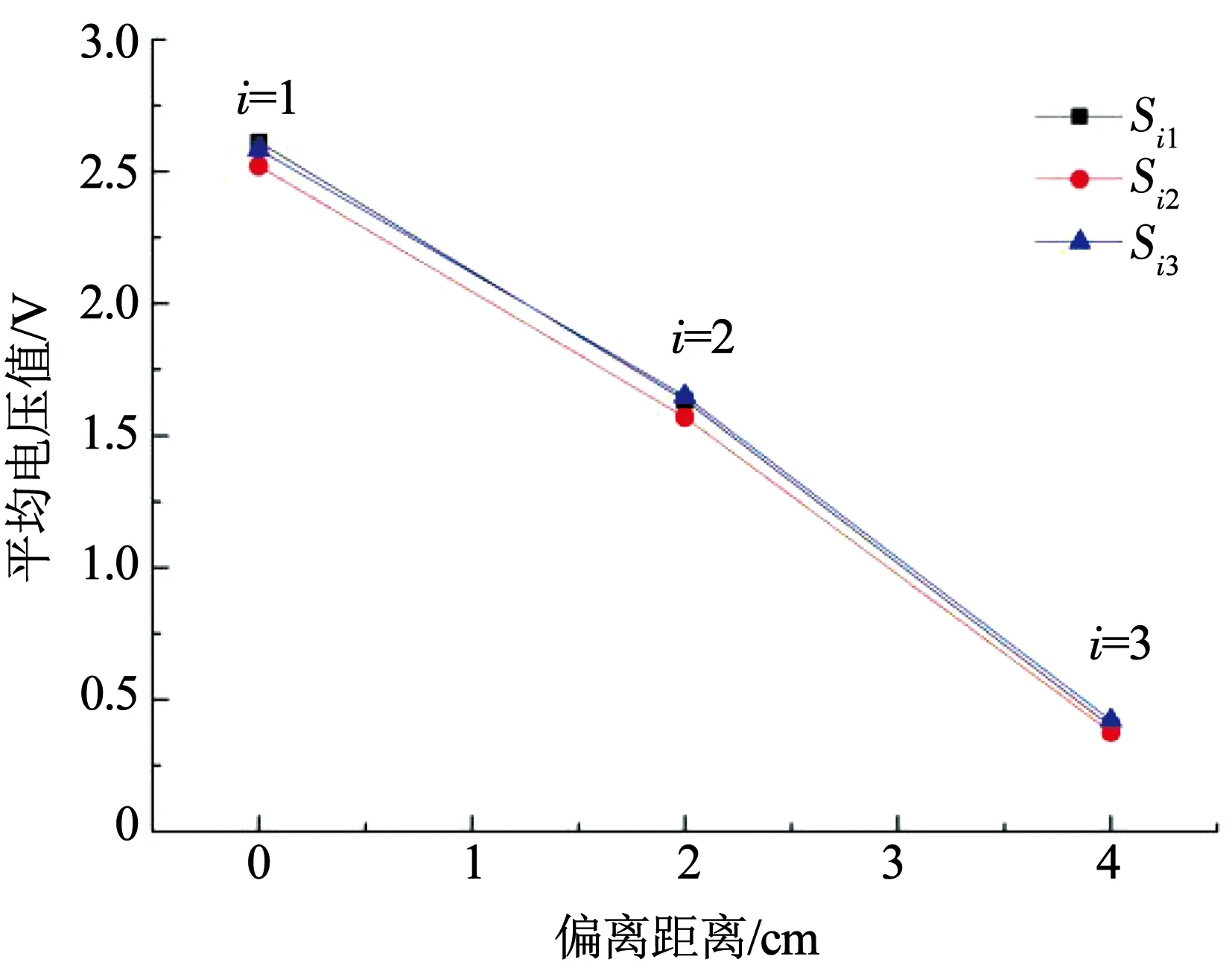
圖14 不同偏離距離的傳感器平均電壓值Fig.14 Average voltage value of sensors with different deviating distances
4.4 被測目標大小估算
根據表2中不同傳感器的主頻數據知尾流邊緣區域的傳感器(S31、S32、S33)檢測到的主頻為0.60~0.80 Hz,該信號可能由傳感器自身擾動或尾流回波引起。根據被測目標正后方尾流的仿真計算主頻為4.67 Hz,實際測試表明,位于正后方的3個傳感器檢測到的最大主頻為5.25 Hz,結合擾動信號疊加,仿真計算的主頻與實際測試的主頻較為一致。根據式(1)計算出被測目標特征尺寸為3.81 cm,與實際特征尺寸4 cm接近。可見,通過檢測到的最大響應頻率信息可以估算被測目標的特征尺寸。
4.5 仿海豹胡須夾角對尾流檢測的影響
海豹在對獵物的尾流進行感知的過程中會頻繁擺頭,從而導致胡須長軸方向與流體運動方向產生一定夾角,即夾角不為0°。為探究仿海豹胡須夾角對尾流檢測的影響,設定0°、45°、90° 3組不同的夾角進行尾流檢測實驗,其他參數設定與圖6所示的實驗方案保持一致。實驗獲得的平均電壓值見表3,主頻見表4。
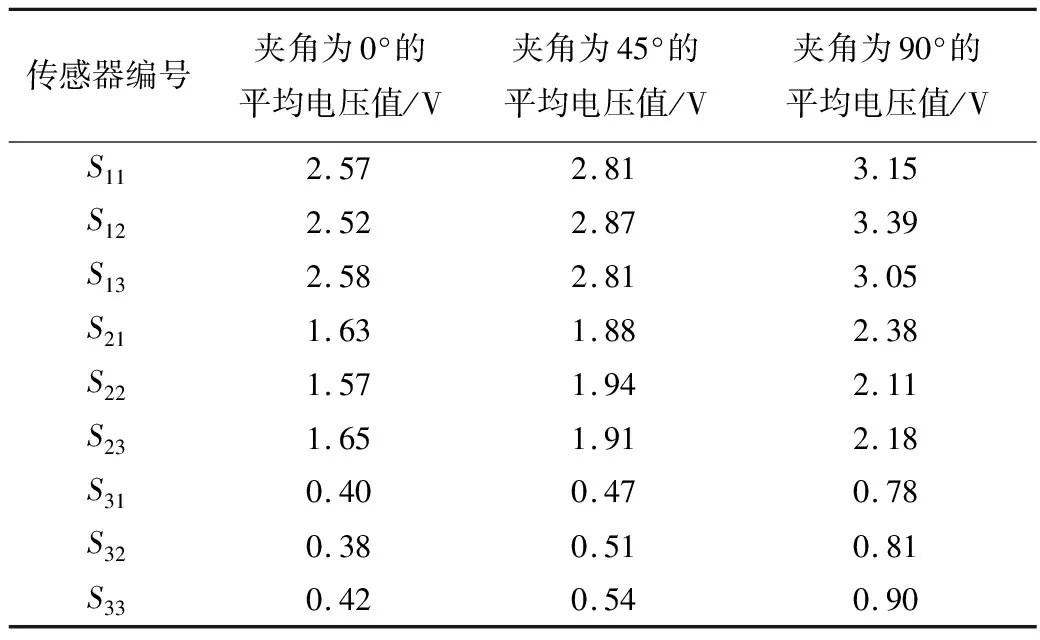
表3 不同夾角下傳感器陣列測得的平均電壓值Tab.3 Average voltage measured by sensor array at different angles of attack

表4 不同夾角下傳感器陣列測得的主頻Tab.4 Main frequency measured by sensor array at different angles of attack
4.5.1 仿海豹胡須夾角對平均電壓值的影響
圖15為仿海豹胡須夾角與平均電壓值的關系曲線,隨著夾角的逐漸增大,平均電壓值也會逐漸增加. 由前文可知,基于平均電壓值的大小來對尾流區和非尾流區進行區分,基于平均電壓值的速度梯度方向來對運動方向進行估算。圖15可以看出,仿海豹胡須傳感器獲得的平均電壓值由明顯的層次區分及速度梯度的變化,因此仿海豹胡須夾角的變化對尾流區的區分及運動方向的估算影響較小。
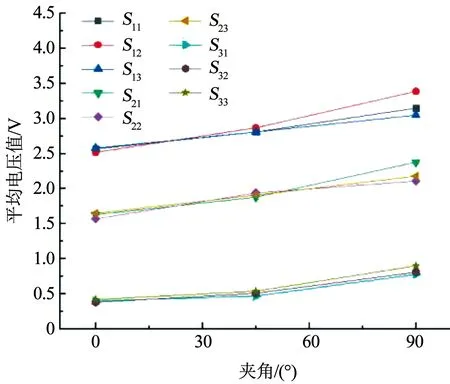
圖15 不同夾角的傳感器平均電壓值Fig.15 Average voltage value of sensors at different angles of attack
4.5.2 仿海豹胡須夾角對主頻的影響
圖16為仿海豹胡須夾角與主頻的關系曲線。由前文可知,基于主頻可以對被測目標物的大小進行反演估算。圖16可以看出,對于非尾流區的仿海豹胡須傳感器而言,其主頻逐漸增加,表明仿海豹胡須模型會產生一定的渦激振動,導致擾動信號不斷增強。對于正后方的仿海豹胡須傳感器而言,主頻信號均在4.80~5.60 Hz之間,反演得到的被測目標物直徑大小范圍為3.57~4.16 cm,與實際直徑尺寸4 cm接近,因此仿海豹胡須夾角的變化對被測目標物的直徑尺寸的估計并無影響。
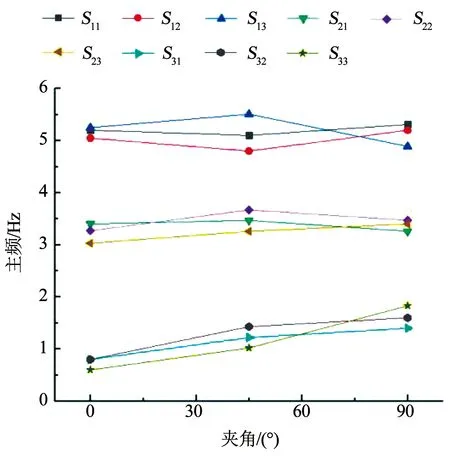
圖16 不同夾角的傳感器主頻分布Fig.16 Main frequency distribution of sensors at different angles of attack
5 結 論
1)在模仿海豹胡須尾流探測基礎上,提出一種仿海豹胡須傳感器陣列檢測水中運動目標尾流特征的方法,獲取尾流時域信號。
2)仿海豹胡須傳感器輸出信號與胡須模型受尾流擾動程度成正比,基于此,若仿海豹胡須傳感器陣列輸出電壓的平均電壓值超過設定閾值,則可判斷出此時胡須模型位于尾流區。
3)獲取仿海豹胡須傳感器陣列中的平均電壓值衰減的梯度方向,從而估算出被測目標的運動軌跡方向。
4)對尾流信號進行快速傅里葉變換獲得主頻特征參數,通過對主頻參數進行反演計算,實現對被測目標特征長度的估算。
5)分析仿海豹胡須夾角對尾流檢測的影響,隨著夾角逐漸增大,仿海豹胡須傳感器產生的自身擾動隨之增大,但對運動軌跡方向的估算及被測目標尺寸的估計無明顯影響。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12