基于智能反射面的空地?zé)o源干擾技術(shù)*
2022-06-30 05:57:56彭玲徐以濤王海超谷江春丁國如
移動通信 2022年6期
彭玲,徐以濤,王海超,谷江春,丁國如
(陸軍工程大學(xué),江蘇 南京 210007)
0 引言
近年來,智能反射面(IRS,Intelligent Reflective Surface)和無人機(UAV,Unmanned Aerial Vehicles)技術(shù)在通信領(lǐng)域的應(yīng)用引起了廣泛關(guān)注[1-2]。智能反射面由大量無源器件構(gòu)成,并且每個單元能夠通過微控制器獨立地調(diào)控相移和幅值,進而重構(gòu)無線電磁環(huán)境[3-4]。與此同時,無人機具有高機動、廣覆蓋、低成本和按需部署等優(yōu)勢[5-7],使得無線傳播環(huán)境的重構(gòu)能夠更高效。
目前,從通信對抗的角度來看,無人機和智能反射面技術(shù)的研究主要以提高通信抗干擾性能為主[8-11]。例如,文獻[8] 研究了智能反射面在基于無人機的正交頻分多址通信系統(tǒng)中的應(yīng)用,利用智能反射面的反射波束帶來顯著增益和無人機的高機動性來提高系統(tǒng)的通信速率。文獻[9] 考慮了一個無人機和智能發(fā)射面結(jié)合的通信系統(tǒng),通過聯(lián)合優(yōu)化無人機的主動波束成形、雷達的被動波束成形以及無人機的軌跡來最大化地面用戶的接收功率。
此外,將智能反射面技術(shù)應(yīng)用于干擾領(lǐng)域也逐步引起了研究者的興趣[12-14]。例如,文獻[12] 提出了將智能反射面作為無源干擾機攻擊合法通信,強調(diào)此種方式不需要任何內(nèi)部能量便可產(chǎn)生干擾信號。然而,智能反射面與干擾領(lǐng)域相結(jié)合的研究還處于初步階段。一方面,由于智能反射面往往放置于固定設(shè)施上,導(dǎo)致干擾缺乏一定的靈活性;另一方面,無人機作為干擾發(fā)射機時,無人機固有的有限能耗導(dǎo)致干擾的持續(xù)性和性能有限。因此,本文提出了一種基于智能反射面的空地?zé)o源干擾系統(tǒng),具體是無人機搭載智能反射面作為一個無源干擾機,實現(xiàn)快速、精準(zhǔn)、低耗能地干擾地面通信用戶對。與傳統(tǒng)干擾系統(tǒng)相比,所提方案中無人機搭載智能反射面作為一個無源干擾機利用通信用戶的信號即可降低通信接收方的通信性能,同時無人機為智能反射面的靈活性提供了可能,進一步降低了通信接收方的通信性能。
為達到干擾效果最優(yōu)化,本文首先提出了一個地面通信用戶對的接收功率之和最小化問題,其優(yōu)化變量包含了無人機位置、智能反射面相移和幅值。為了求解上述問題,首先將原始的優(yōu)化問題解耦成三個子優(yōu)化問題,分別是無人機位置優(yōu)化子問題、智能反射面相移優(yōu)化子問題和幅值優(yōu)化子問題,然后引入半定松弛技術(shù)和高斯隨機化方法對反射面的相移和幅值優(yōu)化問題進行松弛求解,并引入連續(xù)凸近似方法對無人機位置問題進行求解。進一步,設(shè)計交替優(yōu)化算法對上述三個子問題進行迭代求解。最后,仿真結(jié)果證明所提算法比其他的算法能夠更有效地降低地面通信用戶對的接收功率之和。
1 系統(tǒng)模型
基于智能反射面的空地?zé)o源干擾系統(tǒng)如圖1 所示,此干擾系統(tǒng)被分為兩個階段。具體而言,階段1 考慮用戶1 作為發(fā)射機,用戶2 作為接收機,智能反射面利用用戶1 的發(fā)射信號對用戶2 進行干擾;階段2 考慮用戶2作為發(fā)射機,用戶1 作為接收機,智能反射面利用用戶2的發(fā)射信號對用戶1 進行干擾。其中,位于地面的用戶1和用戶2 配備單根天線,搭載智能反射面的無人機一直處于用戶1 和用戶2 的上方。同時,智能反射面裝備了N個反射單元,并可通過微控制中心對反射單元的幅值和相移進行調(diào)控[15-16]。
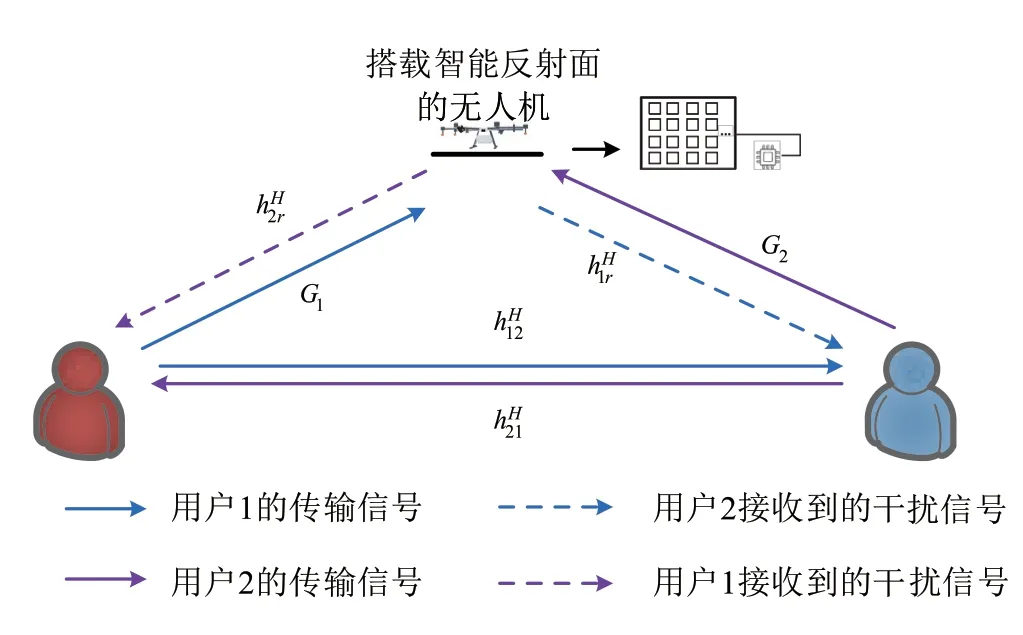
圖1 基于智能反射面的空地?zé)o源干擾系統(tǒng)
1.1 階段1:對用戶2進行干擾
階段1 包含了用戶1—IRS、IRS—用戶2、用戶1—用戶2 三個鏈路,其信道增益分別表示為G1∈?N×1、,其中上標(biāo)H 表示共軛轉(zhuǎn)置運算,?表示a×b的復(fù)值矩陣空間;x1~ CN (0,1)表示從用戶1的發(fā)射信號服從高斯分布,其傳輸功率為Pa;Θ1為階段1中智能反射面的幅值和相移參數(shù)。因此,用戶2 接收到的總的信號可以表示為:

1.2 階段2:對用戶1進行干擾


1.3 用戶1和用戶2的接收功率之和
結(jié)合式(1) 和(3),用戶1 和用戶2 的接收信號之和可以表示為:

為了簡化運算,令v為總的噪聲之和,即v=v1+v2。進一步,結(jié)合(2)和(4),用戶1 和用戶2 的接收功率之和為:

2 優(yōu)化問題構(gòu)建及算法設(shè)計
2.1 優(yōu)化問題構(gòu)建
為了對通信用戶1 以及用戶2 實時干擾,提出一個用戶1 和用戶2 的接收功率之和最小化優(yōu)化問題,如公式(7)所示:
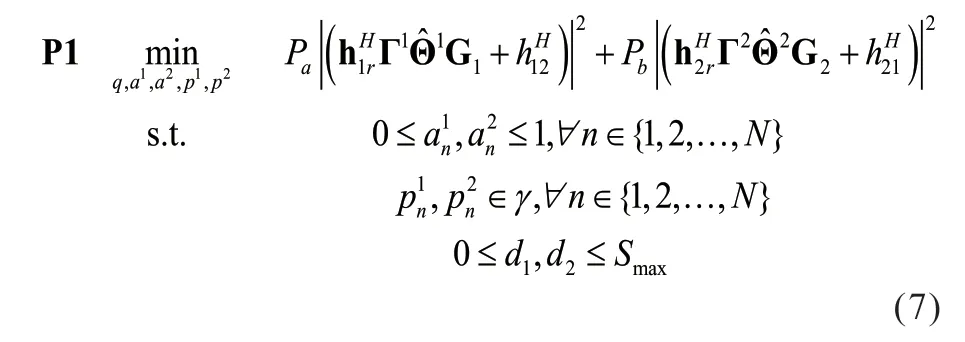
其中,優(yōu)化變量分別為智能反射面在兩個階段的幅值和相位以及無人機的位置。約束條件分別為智能反射面的幅值約束、相移約束以及無人機與用戶間的最大距離約束。
注意到,問題P1 的目標(biāo)函數(shù)包含多個耦合變量,導(dǎo)致問題P1 非凸,難以采用現(xiàn)有的方法直接求解。接下來,為有效地求解問題P1,首先將原始優(yōu)化問題解耦分解成三個子優(yōu)化問題,然后提出交替優(yōu)化方法對三個子問題進行迭代求解。
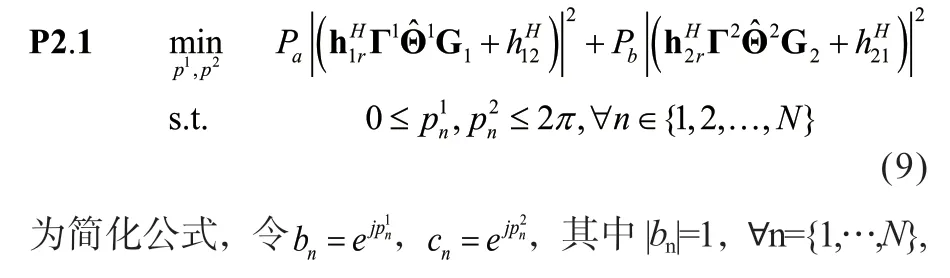
2.2 給定無人機位置和反射面幅值,優(yōu)化反射面相移
首先,給定智能反射面的幅值以及無人機的初始位置分別為a1、a2和q=[x,y,z],則優(yōu)化問題P1 可以轉(zhuǎn)換為:

注意到優(yōu)化問題P2 中的約束是離散的,導(dǎo)致原始問題難以直接求解。因此,可將其松弛成連續(xù)變量,即。然后問題P2 可以轉(zhuǎn)換為:

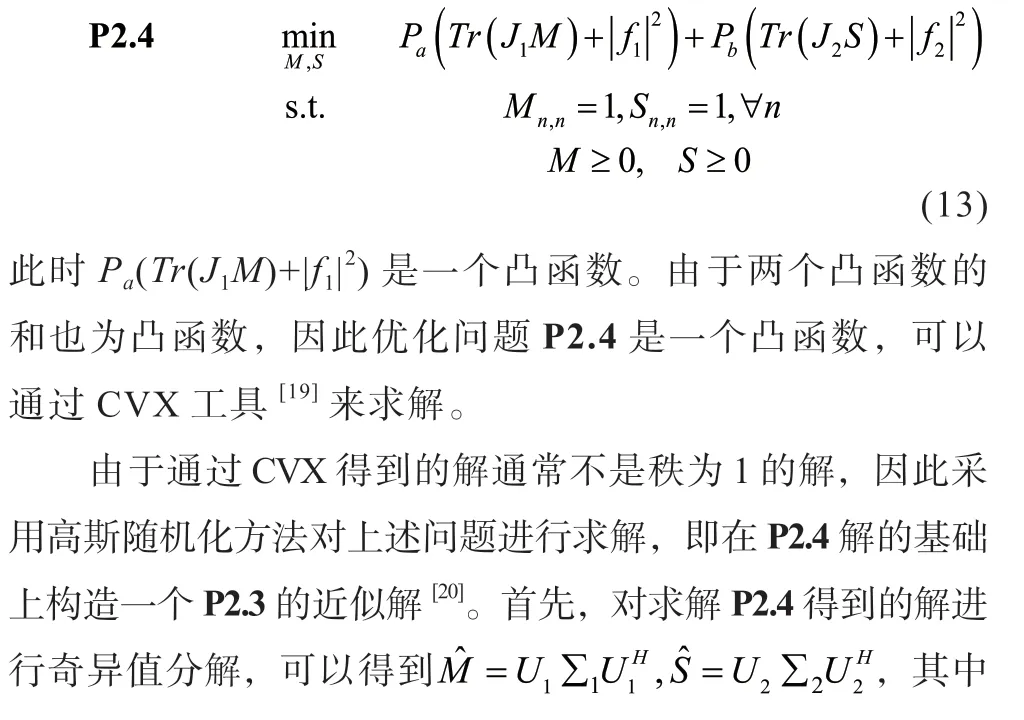
注意到優(yōu)化問題P2.3 中約束rank(M)=1,rank(S)=1導(dǎo)致優(yōu)化問題仍然是非凸的。為了解決此問題,引入半定松弛(SDR,Semi-definite Relaxation)技術(shù)[17-18]。因此,優(yōu)化問題P2.3 可以轉(zhuǎn)換為:
2.3 給定無人機位置和反射面相移,優(yōu)化反射面幅值
將求解P2 得到的最優(yōu)相移解p1,p2和無人機的初始位置q代入到反射面幅值的優(yōu)化問題中,優(yōu)化問題P1 可以轉(zhuǎn)換為:
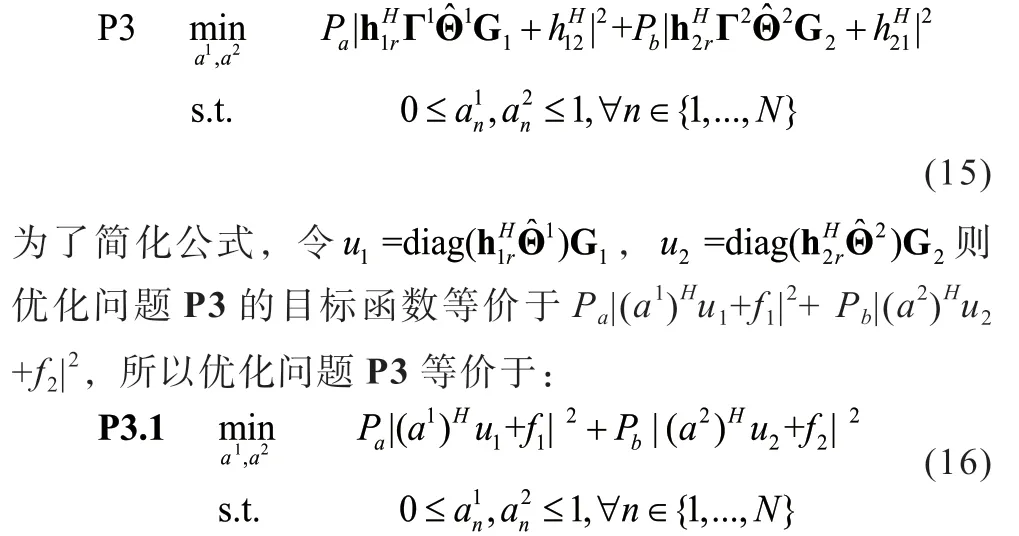
注意到Pa|(a1)Hu1+f1|2是一個凸函數(shù),所以P3.1 是一個凸問題,可以用CVX 求解。相似地,利用高斯隨機化方法求得近似的幅值解。
2.4 給定智能反射面相移和幅值,優(yōu)化無人機位置
將求解P2 得到的最優(yōu)相移解p1,p2和求解P3 得到的最優(yōu)幅值a1,a2代入到無人機位置優(yōu)化問題中,優(yōu)化問題P1 可以轉(zhuǎn)化為:


注意到優(yōu)化問題P4.3 的所有約束都是凸約束且目標(biāo)函數(shù)是線性的,因此問題P4.3 是凸的,可以通過CVX 方法有效求解。
2.5 聯(lián)合優(yōu)化算法設(shè)計
在無人機位置、智能反射面幅值和相移優(yōu)化的基礎(chǔ)上,問題P1 的次優(yōu)解可以通過交替求解問題P2,P3 和P4 得到。注意到,由于原始問題變量互相耦合,難以得到最優(yōu)解,因此,給出了一種次優(yōu)解的解決方案。表1 中算法1 總結(jié)了解決問題P1 的全部過程。首先步驟1 對無人機位置,反射面相移、幅值以及判斷數(shù)值進行初始化;然后步驟2 采用交替下降的方法對無人機位置、反射面相移和幅值進行聯(lián)合優(yōu)化,直到無人機位置優(yōu)化后的功率小于反射面幅值優(yōu)化的功率結(jié)束;步驟3 輸出無人機位置、反射面相移以及幅值。
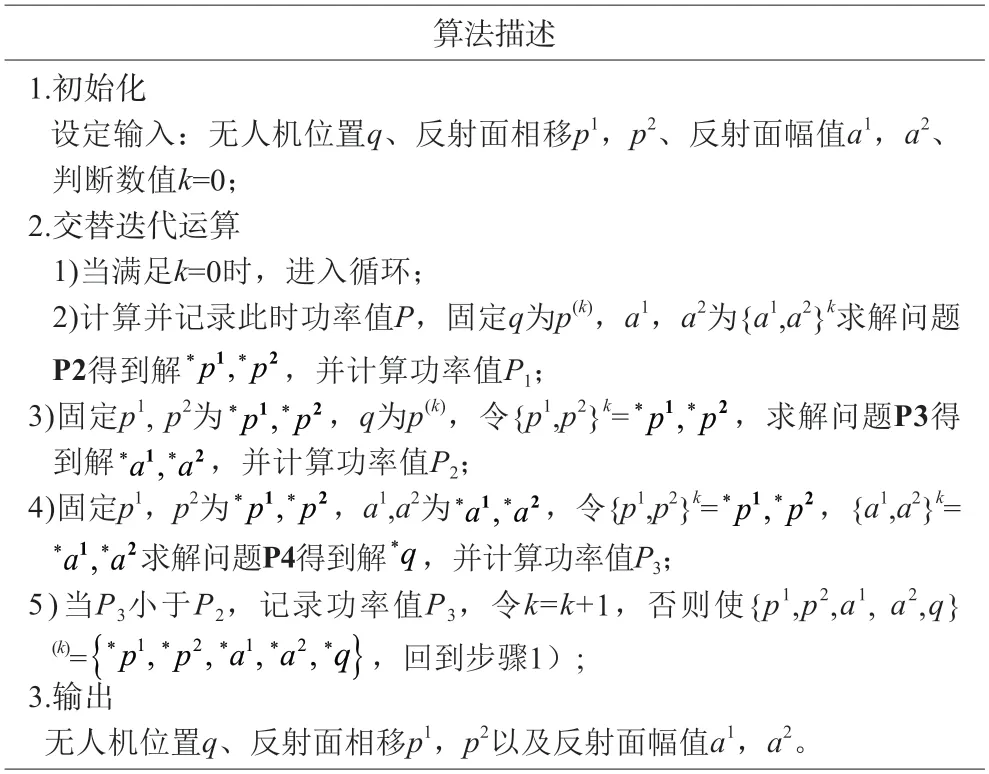
表1 基于智能反射面的幅值和相移以及無人機位置的聯(lián)合優(yōu)化算法
3 仿真分析
為了驗證所提的聯(lián)合優(yōu)化算法的有效性,本節(jié)通過MATLAB2016a 平臺仿真了基于智能反射面的空地?zé)o源干擾技術(shù)的接收功率之和曲線,并與基準(zhǔn)算法(無任何優(yōu)化算法)、僅優(yōu)化相移算法、以及僅優(yōu)化幅值算法進行比較,具體如下:
首先,對仿真參數(shù)進行初始設(shè)置,智能反射面的反射單元個數(shù)N=100,反射相移隨機產(chǎn)生、反射面的幅值都設(shè)置為1。用戶1 和用戶2 的位置分別為u1[0,50,0]和u2[50,50,0],無人機初始位置q[0,0,10]。針對大尺度衰落考慮的增益L(d)=A(d/d0)-α,其中A 是在參考距離d0的路徑損失,被設(shè)置為-30 dB。α為路徑損耗系數(shù),各個鏈路的損耗系數(shù)表示為階段1 的用戶1 到IRS,IRS 到用戶2,用戶1 到用戶2鏈路和階段2 的用戶2 到IRS,IRS 到用戶1,用戶2 到用戶1 鏈路的路徑損耗系數(shù)α1=α2=2,用戶1 到用戶2 鏈路的路徑損耗系數(shù)α3=3.5。針對小尺度衰落[12],小尺度信道系數(shù)是均值和單位方差為零的圓復(fù)高斯隨機變量。兩個時隙下的噪聲功率都為-60 dBm,Pa=45 dBm,Pb=43 dBm。
圖2 展示了IRS 反射單元數(shù)量N=50 時的接收功率之和的曲線。可以看出,基于智能反射面的空地?zé)o源干擾技術(shù)的接收功率之和總是低于其他方案的接收功率,這意味著此技術(shù)下的干擾性能優(yōu)于其他方案。在發(fā)射功率為1 W的時,基于智能反射面的空地?zé)o源干擾系統(tǒng)相較于無任何優(yōu)化方案有接近11×10-10W 的差距,與僅優(yōu)化反射面相移的方案有4×10-10W 的差距。
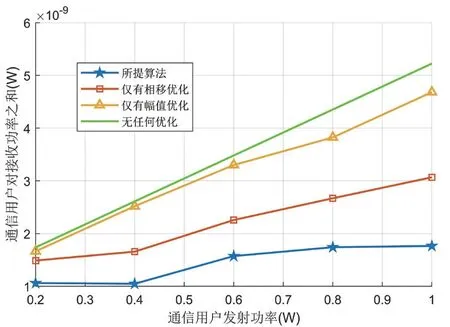
圖2 不同發(fā)射功率對接收功率的影響圖
圖3 展示了發(fā)射功率Pa=0.3 W,Pb=0.2 W 時的接收功率之和的變化曲線。可以看出,基于智能反射面的空地?zé)o源干擾技術(shù)仍然具有優(yōu)越的性能。在IRS 反射單元N=50 時,基于智能反射面的空地?zé)o源干擾系統(tǒng)相較于無任何優(yōu)化方案有接近4×10-10W 的差距,與僅優(yōu)化反射面相移的方案的差距在1.3×10-10W 左右。

圖3 不同反射單元對接收功率的影響圖
4 結(jié)束語
針對傳統(tǒng)干擾方式存在靜態(tài)有源等不足,本文提出了一種基于智能反射面的空地?zé)o源干擾系統(tǒng),通過無人機搭載智能反射面對地面一對通信用戶進行實時干擾。為了優(yōu)化干擾性能,建立了一個通信用戶對的接收功率之和最小化問題,然后設(shè)計交替優(yōu)化算法通過聯(lián)合優(yōu)化無人機位置和智能反射面的幅值和相移對原始優(yōu)化問題進行迭代求解。仿真結(jié)果表明,所提算法相較于傳統(tǒng)的方法有更好的干擾性能,并且隨著智能反射面反射單元數(shù)量的增加而增強。在未來工作中,為了進一步提升干擾性能,可考慮將無人機群應(yīng)用于協(xié)同干擾場景中,例如將單無人機的干擾場景推廣到多無人機干擾的場景[22]。然而,多無人機協(xié)同也存在著一系列的挑戰(zhàn),例如動態(tài)環(huán)境下的信道高復(fù)雜性[23]、干擾的準(zhǔn)確性[24-25]、無人機部署[6]等。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
