AGV調度系統中的通訊方案設計與實現
2022-06-27 08:29:18公建寧康照奇
制造業自動化 2022年3期
關鍵詞:系統
陳 展,公建寧,劉 洋,康照奇
(1.機械科學研究總院,北京 100044;2.機科發展科技股份有限公司,北京 100044)
0 引言
隨著數字化車間和現代化智能輸送系統的自動化、集成化和智能化的不斷提高,自動導引車(Automated guided vehicles,AGV)系統在汽車家電制造、倉儲物流電商等領域,在提高物料運輸效率的同時,有效降低了物料的運輸成本,其產品、技術及解決方案具有日益廣泛的應用場景。
1 簡介
AGV控制系統可分為集中控制系統和分布式控制系統,而相比于AGV分布式控制系統,前者系統中的AGV能夠通過上位機指令,實現工廠模型中的規劃路徑行駛,在車輛調度、路徑優化等方面更為成熟和穩定。工業應用中的AGV項目方案,考慮實際需求一般采用集中式控制系統,而集中式的AGV控制系統主要包括中央調度控制系統和車載控制系統兩部分。中央調度控制系統負責任務調度、路徑規劃和交通管理,車載控制器負責完成下發任務的執行、導航運動和充電安全等方面的控制[1]。AGV系統完成作業離不開兩個控制系統的協同運行,而通訊系統在AGV車載控制系統和中央調度控制系統之間的信息收發過程中起著不可或缺的重要作用。
本文的主要內容包括:
1)基于802.11g標準協議的WLAN技術構建了一個完整傳輸速率高的無線局域網絡,完成AGV與調度系統應用層軟件所在的上位機通過TCP/IP的收發通訊。
2)完整定義中央控制系統與各AGV的車載控制系統的雙向通信協議內容,包括:AGV上下線、訂單任務下發、移動指示燈光、AGV電量速度、AGV位置姿態和手動控制轉換。
3)針對AGV的集中式控制系統通訊壓力大的問題,分析上位機軟件體系結構,增設AGV車載通訊適配器的通訊模塊。
2 方法
AGV集中控制系統的通訊結構如圖1所示,在AGV的集中式控制系統中,中央調度控制系統與各AGV進行雙向通信,各AGV之間不互相通信[2]。

圖1 通訊系統結構
2.1 通訊結構設計
常用的無線通信方式有無線局域網(WLAN)、Zigbee、藍牙(Bluetooth)、紅外(Ir DA)技術和超寬帶(UWB)技術等。設計方案為提升AGV系統運行時數據通訊的實時性、可靠性和穩定性,并考慮AGV系統干擾源多、系統需要遠程通訊的工作環境要求,整理比對了各頻段協議的傳輸最大速率、覆蓋范圍和應用價格,如表1所示[3]。

表1 協議對比結果
根據分析,方案設計選擇基于802.11g標準的WLAN技術來完成AGV通信系統的網絡架設,傳輸速率較大,有效工作距離遠超Zigbee和藍牙,且IEEE802.11g與IEEE802.11bWi-Fi系統具有良好的兼容性,適用于功率較大的AGV系統網絡。
WLAN的通信傳輸協議包括TCP協議和UDP協議。TCP(Transmission Control Protocol)為用戶提供了一種面向連接且基于字節流的通信連接;UDP(User Datagram Protocol)提供的是面向非連接的數據傳輸,與TCP協議不同的是,可直接進行數據收發而不需要雙方首先建立連接。UDP協議的數據收發不受連接限制,因而具備更高的通信效率,但不可避免地降低了UDP協議傳輸數據的可靠性[4]。在上位機和AGV小車正式收發數據前,要求雙方先建立可靠的連接。綜合考慮AGV系統通訊系統的實時性和工作環境需求,通訊方案選擇更為成熟的TCP傳輸協議搭建系統無線通訊網絡。
WLAN的組網方式靈活,常用的WLAN網絡拓撲結構有IBSS和ESS拓撲結構。
IBSS(Independent Basic Service Set,獨立基本服務集)網絡結構的連接方式中,其拓撲結構簡單,易維護,該結構下各個AGV互相之間都可通過無線網卡進行相互之間通信,但存在AGV間信道共用問題,適合AGV分布式控制系統;ESS(Extent Service Set,拓展服務集)網絡包含多個無線AP,連入網絡的AGV在進行數據通訊的同時,還支持AP間對頻率和空間的重利用,該結構能夠充分適用于AGV集中控制系統的網絡通訊需求[5]。
為了提高無線網絡連接的安全性和穩定性,預先分配路由器的IP地址范圍,設置系統通訊的地址池,對接入該無線網絡的AGV分配靜態的IP地址,將AGV對應的MAC
地址與固定的IP地址綁定,方便上位機的服務器根據IP地址識別登記相應的AGV[6]。
2.2 通訊內容定義
在工業環境現場,AGV機器人主要通過自動出入裝卸站、工作臺和貨架等定義單元,完成物料入庫、出庫等操作的搬運輸送,可以充分適應工作時間長、搬運量大等要求[7]。中央調度控制系統和AGV車載控制系統的具體通訊流程如下:
1)建立連接:上位機調度控制系統接受MES系統響應后,通過通訊系統的與空閑狀態的AGV建立訂單聯系,并檢驗該AGV是否可以處理對應訂單。
2)訂單命令:AGV可以處理對應訂單,上位機開始逐段下發移動指令,AGV回復確認數據。為提高AGV行駛狀態的流暢性,運行在下發行駛路段的同時,提前下發預分配線段。
3)信息更新:AGV通過無線網絡向上位機發送當前位置和狀態,上位機將所接收的數據更新存儲,釋放路徑資源。
4)心跳包:AGV定時發送小車位置及狀態的實時數據,用以檢測AGV與上位機的穩定通信,防止系統連接掉線[8]。
5)訂單回復:AGV主動上報已經到達訂單目的地,完成裝貨、卸貨或充電的操作指令。
6)訂單結束:上位機回復AGV完成訂單的主動回復,繼續下發訂單或將該AGV泊車。
通訊系統傳輸收發的標準數據,定義在協議報文的數據包中,車載通訊系統向上位機發送數據為上行,上位機向車載通訊系統發送數據為下行。協議以定長字節數組數據包形式發送。
報頭占用1個字節,OxAA判斷為該段數據包報文的起點。主要是防止因接收錯誤報文導致的系統錯誤問題,方便在傳輸數據包時,數據的識別匹配。
功能碼占用1個字節,定義如表2所示。

表2 功能碼
依據不同的功能碼,車載控制系統會對協議報文進行相對應的解析與處理。
AGV車號ID段占用高低位2個字節,用于上位機判別數據包的來源AGV,并將要下發的數據精確地送達指定AGV;
AGV位置占用高低位2個字節,用于上位機控制系統車載控制系統相互對標,并為系統的實時運轉狀態提供可靠依據。
AGV電量占用高低位2個字節,用于中央調度控制系統評估任務訂單的下發和及時為蓄能不足的AGV下發自動充電指令,以維持系統的高效穩定運行。
AGV是否可以處理下發訂單的狀態回復占用1個字節,用以二次確認AGV的狀態,避免訂單的無效下發。
動作指令段占用1個字節,包含的定義動作指令如表3所示。

表3 動作指令表
AGV路徑線段的下發占用4個字節,用于下發下一目的點對應的前后兩條路徑線段。提前發出的第二條路徑線段用以保證AGV運行狀態的流暢度。指令依據中央調度系統路徑資源分配機制,依次分段下發,且每次都需要上行確認,以期及時釋放路徑資源。直到完成該訂單所規劃的包含路徑為止。
上下行指令及響應幀格式如表4和表5所示。

表4 下行報文

表5 上行報文
報文校驗段占用兩字節,用于校驗所傳輸的數據中準確性,判斷是否存在錯誤數據。報文協議采用CRC校驗,以提高系統通信的可靠性[9]。
報尾占用1個字節,OxBB判斷為該段數據包報文的終點。
2.3 通訊適配器
上位機調度控制系統基于開源組織架構open TCS,針對AGV的集中式控制系統通訊壓力大的問題,分析上位機軟件體系結構,用Java編程語言編寫通訊適配器,完成對系統通訊模塊的集成開發。
軟件框架如圖2所示。

圖2 軟件框架圖
openTCS支持的通訊適配器,主要實現于特定的自動導引車、非連續的運輸機等的通信協議,作為內核和執行設備之間的中介。AGV通訊通訊器的實現步驟如下:
1)創建子類Vehicle CommAdapter:繼承BasicVehicleCommAdapter實現命令隊列管理;在派生類中realvehicle的抽象方法;調用comm適配器模型上的相應方法setVehiclePosition()和commandExecuted()等,當受控AGV報告狀態和訂單作業時,反饋內核kernel。
2)創建VehicleCommAdapterFactory工廠類,依次為實例化VehicleCommAdapter給定的AGV對象。
3)為通訊適配器創建Guice模塊KernelInjectionModule。注冊并綁定VehicleCommAdapterFactory,以用于openTCS的java.util.ServiceLoader服務項在啟動時自動查找Guice模塊。
4)在CommProtocol類中,定義協議基本內容和觸發機制。
5)啟動上位機調度系統open TCS的內核之前,將通訊適配器的JAR文件及其他資源放在內核kernel應用程序安裝目錄的子目錄中。保證kernel.bat的啟動腳本在應用程序的類路徑中包含該目錄中的所有JAR文件,啟動內核時,可以自動搜索找到滿足要求的通訊適配器。
3 實驗
實驗設備主要包括一臺上位機PC,兩臺自然導航方式AGV,一臺無線路由器等。
利用Gradle構建工具,編譯生成內核、內核控制中心和執行軟件,依次啟動kernel.bat、kernelcontrolcenter.bat和plantoverview.bat的啟動腳本,上線測試AGV,并在內核控制中心加載real vehicle的通訊適配器,如圖3所示。

圖3 通訊適配器
AGV基本配置參數如表6所示。

表6 AGV配置參數
無線路由器選用TL-WDR5620千兆易展版,部分規格參數如表7所示。

表7 路由器規格參數
通訊系統基于上位機調度管理軟件openTCS,設計滿足激光導航、磁導航和自然導航等導航方式AGV移動機器人的運行過程,在實驗室研究的自然導航AGV的基礎上,進行AGV通訊系統的現場測試,驗證本文研究方案的可行性,如圖4所示。
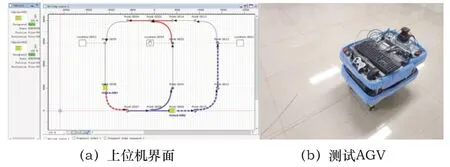
圖4 實驗測試
經實驗驗證,中央調度控制系統和車載控制系統在工作運行時能夠滿足正常有效通訊,AGV系統能夠依需完成訂單作業。
4 結語
隨著企業智能制造的不斷改造和升級,AGV等移動機器人扮演著相當重要的角色,隨著5G時代和工業4.0的發展到來,AGV的模塊化設計研究,可以有效縮短開發周期,更能適應各種使用需求,本文的通訊系統方案就是采用模塊化的設計方法,能夠根據具體的使用要求,組合AGV的其余功能模塊,開發設計不同系列的物流解決方案[10]。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
