傾斜攝影測量技術在港口條帶狀地形中的應用研究
2022-06-17 05:36:26亢保軍
港工技術 2022年3期
王 頔,王 朝,亢保軍
(中交第一航務工程勘察設計院有限公司,天津 300220)
引言
近年來,傾斜攝影測量技術逐漸發展成為了地形測量的主流技術,該技術通過無人機搭載多個鏡頭相機,采集多個視角的地物影像數據,獲取地物頂部及側面高分辨率紋理信息,通過空三解算和建模方法,構建實景三維模型。朱征等[1]以傾斜攝影測量技術對白格堰塞區復雜環境進行了三維數字模型重建,講解了無人機數據采集的步驟要點。毛清政[2]對傾斜攝影測量中影響模型精度的像控點數量展開探討。曲林等[3]在數據采集的基礎上講解了實景三維建模的方法,并對其應用領域進行了探討。羅萬波[4]通過對泉州地區進行三維建模,提出了生產三維實景模型的方案,并探討了大規模實景三維模型的數據管理方法和基于表面約束水面重建的解決方案。隨著該技術的發展,傾斜攝影測量技術也逐漸應用于水運行業,但由于港區地形多為涉水區域,尤其是條帶狀的地形如延伸出去的防波堤,LNG 碼頭等紋理信息較弱,難以通過空三解算形成三維實景模型,因此本文針對港口地區條帶狀地形進行對比研究。
1 研究內容與流程
本次研究共分為四個方面的內容,通過選取已有項目中條帶狀地物,對比分析其技術方案的設計,像控點的布設方案、空三解算精度及模型精細程度四個方面,尋找適用于港口地區條帶狀地物的傾斜攝影測量采集方法,技術路線如圖1 所示。

圖1 技術路線
2 研究區域概況
本次研究共選取已有項目具有代表性的三個常見的港區條帶狀區域開展本次研究工作,三個研究區均大面積涉水,且存在大面積弱紋理信息特征地形,以此開展傾斜攝影測量技術的應用研究十分具有代表性,如圖2 所示。研究區1 為常見延伸入海的碼頭類型,長約1 000 m,寬約20 m 的弱紋理道路,兩側均為海水,延伸區域長約220 m,寬約70 m,四面環水;研究區2 為港區常見的防波堤類型,該區域長約1 400 m,寬約17 m,為扭王字塊堆積而成,兩側隨海水漲落潮顯現,人員行走困難且難以尋找平面位置進行像控點布設。研究區3 為近港口的倒L 型碼頭,四面環水,且有架空管道及各種附屬設施,離岸長約140 m,寬約30 m,南北向長約340 m,寬約20 m。

圖2 研究區域示意
3 對比分析
3.1 技術方案的設計
本次開展的相關研究均使用大疆M600pro 六旋翼無人機搭載睿鉑RIY-D2Pros 五鏡頭相機進行數據采集工作。研究區1 設置南北向沿長邊飛行,飛行高度90 m,飛行范圍由于大橋為路面無高大建筑未外擴航高,東西向延伸區域由于存在高達建筑單獨外擴航高90 m,地面分辨率1.6 cm,航向重疊率80 %,旁向重疊率83 %,共飛行2 個架次。研究區2 設置垂直于長邊飛行,飛行高度120 m,為保證地面高大建筑物的側面紋理,飛行范圍外擴航高120 m,地面分辨率2.1 cm,航向重疊率80 %,旁向重疊率83 %,共飛行1 個架次。研究區3 設置沿防波堤長邊方向飛行,飛行高度60 m,由于防波堤地面起伏不大,所以未外擴航高,地面分辨率1.1 cm,航向重疊率80 %,旁向重疊率83 %,共飛行3 個架次。
3.2 像控點的布設方案
研究區1 考慮到該區域長度達到了1 000 m,且橋面均為路面,紋理較少難以識別,為確保模型精度,采用成對布設的方式布設像控點,每間隔約250 m 布設一對像控點,共計布設像控點13 個,像控點分布如圖3(a)所示。研究區2 由于防波堤區域較難找到平面位置,且防波堤中間高兩邊低的形態分布,采用單點布設的方式布設像控點,每間隔約260 m 布設一個像控點,共計布設像控點6 個,像控點分布如圖3(b)所示。研究區3 由于測區面積較小,采用四個角點的方式布設像控點,共計布設像控點4 個,像控點分布如圖3(c)所示。
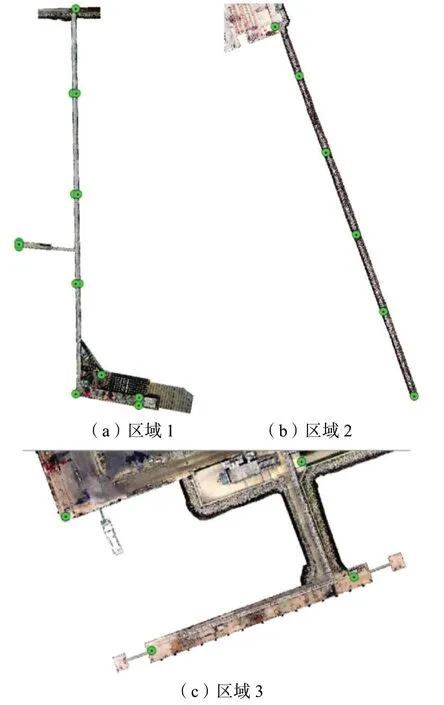
圖3 像控點分布
3.3 空三解算精度
將采集數據導入Smart3D 軟件進行空中三角測量,通過使用原始POS 數據做剛體變換進行初步空三計算,提取特征點,進行同名點匹配、迭代平差、畸變矯正獲取外方位元素,然后根據初步空三成果進行控制點刺點,使用控制點進行平差計算,直至空三結果正確且精度滿足規范要求,通過空三解算結果生成實景三維模型。為實際檢驗實景三維模型建模精度,通過研究區采集的均勻分布的檢核點進行精度檢核,在三維模型中刺出檢核點位置,最后將檢核點影像刺點坐標與實測坐標進行對比。經統計研究區1,平面中誤差0.018 m,高程0.020 m;研究區2,平面中誤差0.034 m,高程0.018 m;研究區3,平面中誤差0.066 m,高程0.010 m。
3.4 模型精細程度
綜合對比三個研究區的實景三維模型,通過觀察模型是否有扭曲變形、漏洞、飛點等問題判斷模型的精細程度,經過對比發現研究區2 實景三維模型精細度最好,防波堤無任何扭曲變形及破洞現象。研究區1 及研究區3 的三維實景模型效果均完整較好,但存在局部輕微扭曲變形,如鏤空的設施(如鏤空鐵門、信號塔、輸油臂等)存在局部空洞使用單一顏色補充現象。
1)研究區1 的整體實景三維模型完好,大橋橋面連接真實平整,但由于橋面區域未外擴航高,底部橋墩區域未露出,需后期單體化修模進行補充;模型中的高大建筑完整真實,房角線平直無錯位,但鏤空的設施如房頂的信號塔、柵欄型鐵門則顯示存在部分缺失,可移動的龍門吊考慮移動作業的原因存在小型局部破洞(已進行單一顏色補充),如圖4 所示。

圖4 研究區1 三維實景模型局部放大
2)研究區2 的整體實景三維模型完好,整條防波堤顯示完整,連接無扭曲變形、破洞現象,各個扭王字塊顯示真實,無扭曲變形現象,如圖5 所示。
3)研究區3 的整體實景三維模型完好,長條形路面及管線架顯示真實完整,路面平整、標線完整,管線架顯示完好,各管道線路清晰,連接無扭曲錯位。高大鏤空的設施設備如輸油臂存在小型局部破洞(以進行單一顏色補充),如圖6 所示。
圖6 研究區3 三維實景模型局部放大
4 小結
本次研究選取了港口具有代表性的三塊條帶狀區域作為研究區開展本次對比研究工作,分別從技術方案的設計,像控點的布設方案、空三解算精度及模型精細程度四個方面進行對比分析,尋求適用于港口條帶狀區域數據采集方法。通過上文四個部分的對比分析,發現以下幾點操作可顯著提高空中三角測量通過度及模型精度:
1)飛行條帶狀區域時應適當降低飛行高度,保證每張圖片中的地形數據占據1/3 以上,避免水體過多。
2)若沿長邊飛行,適當提高旁向重疊度,保證測繪區域覆蓋多條航線,若條件允許的情況下垂直于長邊飛行效果更好。
3)像控點布設時成對布設模式可提高空中三角測量通過度,且模型精度更高。
5 結語
通過傾斜攝影測量技術對港區條帶狀特征的三塊研究區域進行了對比研究,總結出適用于大范圍水域中條帶狀地形的數據采集方法,具備較強的實操性,可得到高精度的實景三維模型,為類似的傾斜攝影測量技術應用場景提供新的解決思路和參考借鑒。
本文的研究數據均為具體項目實施過程中所采集和處理的實景三維模型,所采用的技術方法也以滿足工程要求為主要目的,未進行針對性的固定航高、固定航線方向、固定像控點數量或間隔等單一因子的分析研究,故所得結論僅為針對已有研究成果做出的總結,在今后的工程應用中還需經過進一步的實踐檢驗。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
