基于最小二乘法的供水泵站變頻控制系統設計
2022-06-15 09:06:20曹景玉
電子設計工程 2022年11期
曹景玉,沈 寧,孔 欣
(水發規劃設計有限公司,山東濟南 250000)
自動化變頻器在供水設備上得到了廣泛應用,其發展迅速且智能化程度較高[1]。以往大都使用基于PLC 技術的供水泵站變頻控制系統,該系統以泵站總管的出水壓力為控制目標,將設定壓力值和實際反饋壓力值作比較,差值輸入經PID 調整器壓力顯示處理后,輸出信號至變頻器以控制泵的運行速度,即使在供水泵站流量快速變化的情況下,供水壓力也能在相關作用下趨于穩定狀態[2]。雖然這類傳統PLC 控制系統中已加入了液力偶合器調速裝置,但是尚未涉及調速裝置的優化,同時,將PLC 系統中的串級調速裝置優化為功率轉換裝置,雖然優化后的系統調節結構簡單、設備維護方便,但與此同時,其能耗較大、控制效果不佳。
針對上述問題,提出了基于最小二乘法的供水泵站變頻控制系統,其關鍵在于可以在保證系統頻率調節能力的前提下,對系統進行初始化調試,使供水泵站變頻控制系統設計成為最佳的解決方案。
1 系統硬件設計
供水泵站變頻控制系統以ATMEL 公司研發的ATMEGA128L 單片機為核心處理器,通過轉換模塊得到4 個處理通道,此時,傳感器會發送被放大的信號。經過單片機處理后,轉換成相應的頻率控制,轉換信號以后,處理結果通過RS-485 通信傳輸到上位機,為了避免因溫度過高影響電路安全,保證溫度變化平穩,引入了溫度測量模塊,以供未來數據處理時使用[3]。圖1 為供水泵站變頻控制系統硬件結構。
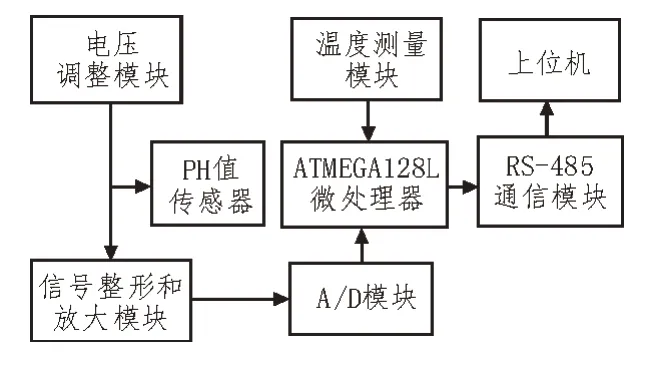
圖1 供水泵站變頻控制系統硬件結構
ATMEGA128L 單片機核心處理器是一款高效能、低功耗的8 位微處理器,工作電壓低至2.7 V,具有先進的RISC 結構,在大多數情況下能在一個時鐘周期內完成指令,16 MHz 的工作性能可以達到16 MIPS。該片集成了4 k 字節的EEPROM,在大多數情況下都能滿足數據存儲和備份的要求。將8 通道A/D轉換模塊集成到芯片中,以8位和10位的采樣精度作為選配參數,同時,通道還能接收來自4 個電路的參數,保證采集信號的穩定性[4]。E331D 型復合電極分為基準電極和測量電極兩部分,基準電極安裝于基準電壓調節模塊,測量電極安裝于基準電壓采集放大模塊[5]。
1.1 中央控制器
中央控制器結構如圖2 所示。

圖2 中央控制器結構
中控臺在運行過程中,通過壓力傳感器將管路實際壓力(P 管)傳送到壓力顯示裝置,采用PLCA/數模轉換法,比較分析管路的實際壓力與設定壓力,若管路實際壓力大于設計壓力0.5 MPa,則在主變頻下停止指示;若管路實際壓力小于管路設定壓力0.5 MPa,則在主變頻下停止指示[6]。原變頻運行單元改為工頻運行,新開關組成為變頻運行,始終保持設定壓力值,從而實現恒壓供水[7]。
1.2 電路設計
以ARMCortex-M3 系列32 位處理器單片機為核心,主控芯片選用低能耗模式,在保證正常工作的同時又能降低功耗[8]。利用PCA9685 模塊(PWM)實現16路12位高精度脈寬調制,采用TTL級標準串口協議進行通信接口的執行,在工作時波特率為115 200 b/s,字符指令用于接收外部輸入[9-10]。主芯片根據IIC 協議對串口接收的指令進行處理,并控制PCA9685 模塊輸出PWM 信號至控制操作器,通信接口執行后返回指令。
1.2.1 電源電路
為保證各回路保持穩定,電路選擇穩壓集成電路,可提供不同平穩電壓[11]。
1.2.2 輸入電路
根據電機的不同運行方式輸入相應的數據參數,如反向指令、多數轉速指令、故障復位等電機運行信號[12-13]。
1.2.3 顯示電路
參數由LED 數碼管進行顯示,通過PID 控制電流、管路壓力、頻率指示、電壓等參數,經過顯示電路精確顯示出系統的參數和相關狀態。
1.2.4 運行電路
為了實時觀察設備的運行狀態,系統通過LED指示燈作為狀態提示。當系統出現問題時,指示燈閃爍,同時會響起警報[14-16]。
1.2.5 輸出電路
系統中設置了脈沖輸出、多功能模擬量輸出、故障點輸出和多功能斷路器輸出等多種輸出形式,通過PLC、A/D 數模轉換傳遞信號,能準確有效地反映系統的工作狀態。
1.2.6 電壓調整電路
文中單片機A/D 轉換電路的參考電壓為5 V,即規定傳感器的測量電極輸出電壓經信號放大后必須在0~5 V 范圍內,同時,測量電極的電壓要高于參考電極的電壓,當測量溶液為酸性時,測量電極的電壓比參考電極的電壓要低;當測量溶液為堿性時,測量電極的電壓比參考電極的電壓要高,在采集信號時,系統能否正確選擇合理的電壓,是采集信號的關鍵。圖3 為電壓調整電路。
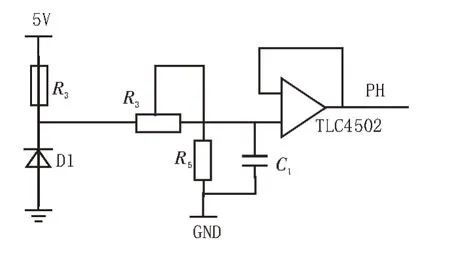
圖3 電壓調整電路
1.3 信號采集與放大模塊
頻率控制傳感器測量電極輸出的電壓值為毫伏級,當被測溶液頻率控制發生變化時,測量電極輸出的電壓信號變化很小,當溫度一定時,溶液保持一定的頻率變化,此時輸出的電壓為0.059 V,因為數值較小,單片機收集處理會比較困難,所以必須設計信息接收和放大功能模塊,將輸出電壓放大,提高單片機采集信息的精度。
使用放大芯片TLC4502,輸出的電壓信號可以被放大3 倍以上,并傳送到3 號引腳,被放大的電壓經過新的電阻傳輸到單片機轉換器中,完成信號放大。
1.4 變頻控制器
排水系統的輸水管道采用DN300UPVC 管。水庫出口設有OST200-420 A型兩臺水泵,泵的參數:Q=515 m3/h,H=43 m,P=9 kW,架構一套變頻控制系統,兩個水泵共用一個ABBVF-S11-4015 PL 變頻器,變頻控制器結構如圖4 所示。

圖4 變頻控制器結構
變頻控制器是一種實現變頻器遠程操作的智能設備,通過RS-485 實現遠程控制變頻器的啟動與停止,并實時顯示其工作頻率和實際轉速等信息,避免外界環境干擾。
2 系統軟件設計
2.1 基于最小二乘法變頻控制模型的構建
在傳統的變頻控制系統中,元件控制和基于節流或容積因子的控制方案都存在著明顯的缺陷,如在傳統的變頻控制系統中,節流參數的調節是以閥的控制為核心。在高功率的情況下,變頻控制系統的閥門壓力F計算公式如下所示:

式(1)、式(2)中,Pi表示第i個傳感器頻率控制強度;Pv表示閥門的變頻控制強度;Sv表示閥門的橫截面積;Ct表示水泵中液體體積流量;N表示元件組數。
變頻控制系統中傳感器組和水泵之間的體積流量成為制約系統大功率應用的瓶頸,當控制頻率為I時,供水泵單位時間內排出的氣量Y為:
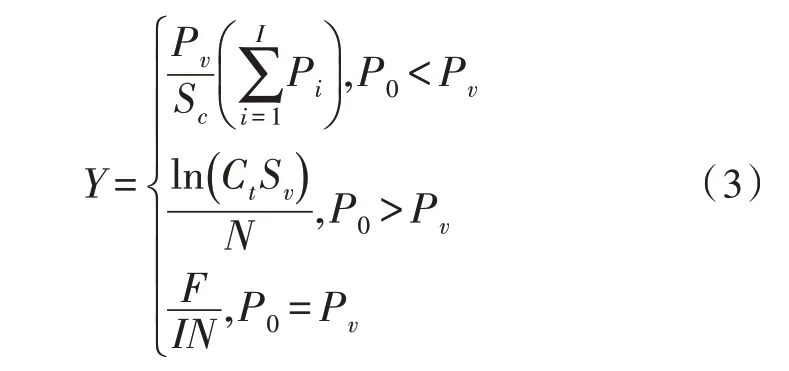
式(3)中,Sc表示供水泵活塞的面積;P0表示初始傳感器頻率變化控制強度,由此可獲取單位時間內的氣缸流量。
基于驅動系統的功率需求和閥門的控制損耗,結合電機推動力與傳感器組水平方向和垂直方向的最大角弧度α、電機推動力與傳感器組的角弧度β,可得出分布式驅動電機通過水泵在不同尺寸的動態流量推送時產生的動力。在傳感器變頻控制強度與閥門變頻控制強度相同的情況下,從水平和垂直兩個方向的弧度中,選取最大值和最小值進行積分求解。根據動態水泵容積流量和閥門的應力變化情況,確定頻率變化控制能力。
為提高變頻調速系統的工作效率,進一步提高元件的可靠性,采用最小二乘法來優化變頻調速傳感器組內各傳感器的變頻控制強度,以達到與閥門高度融合、減少控制損耗、提高變頻調速系統的控制力和推動力的作用。
綜上所述,對于給定的一組傳感器,根據獲取的變頻控制力,可以使傳感器組和閥門的融合程度最高。為此,有必要尋找電機和傳感裝置的最小二乘多項式曲線擬合函數X,由此構建基于最小二乘法的變頻控制模型,如式(4)所示:
在該模型支持下,設計系統控制程序,分配I/O,并設計頻率控制流程,實現供水泵站低功耗、高效的變頻控制。
2.2 系統程序控制與I/O分配
系統程序控制與I/O 分配如圖5 所示。
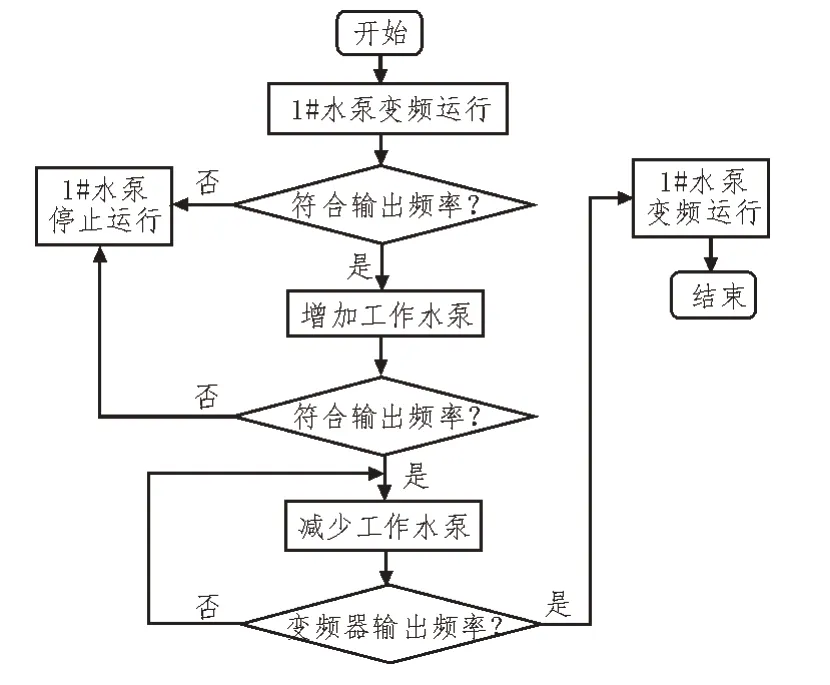
圖5 系統程序控制與I/O分配
由圖5 可知,當系統處于自動啟動狀態時,首先啟動1#水泵,等待5 s 后,使壓力穩定下來,通過PLC可以檢測變頻器的輸出頻率。在檢測到變頻器的下界頻率信號時,關閉1#水泵;反之,在檢測到變頻器的上界頻率信號時,PLC 執行加泵操作:1)一臺水泵工頻運行,另一臺水泵延遲1 s;2)一臺水泵延遲1 s,開關全滅弧,另一臺水泵延遲0.2 s。
在1#水泵上,為保護水泵和變頻器而實現電氣互鎖,在等待5 s后,PLC在2#水泵進入變頻運行后,繼續檢測變頻器的輸出頻率。當檢測到變頻器的下界頻率信號,關閉1#水泵,設2#水泵處于變頻運行狀態,等待5 s 后,如果PLC 再次檢測到變頻器的下界頻率信號,同樣關閉2#水泵;反之,當檢測到變頻器的上界頻率信號時,PLC 再執行增壓泵的動作。
將2#水泵改為工頻運行,等待1 s 后,變頻運行3#水泵。在3#泵投入變頻運行后,等待5 s 后的PLC繼續檢測變頻器輸出頻率,由此執行增泵、減泵動作,以滿足恒壓供水的目的。
此外,為便于檢查維修故障,該變頻器在設計中增加了故障顯示和故障報警輸出,其自身具有短路保護和過載保護功能,只需將變頻器的輔助觸點如故障輸出點、接觸器、熱繼電器等與PLC 連接即可。當出現故障時,PLC 通過程序掃描這些輸入點,并作出相應動作。如果發現某臺水泵有超載現象,則切斷該泵的接觸器投入備用泵,同時輸出故障信號,以方便檢查后及時維修。
3 實 驗
為了驗證基于最小二乘法的供水泵站變頻控制系統設計的合理性,進行實驗驗證分析。利用某住宅小區的歷史運行數據作為數據源,建立模擬實驗室供水網絡。根據水泵的流量和壓力數據,擬合出水泵揚程參數、效率和流量功率的曲線方程,并修正了水泵特性曲線。在此基礎上,確定了水泵變頻調速的有效范圍,分析水泵運行效率影響因素,其中,水泵出口流量為200 L/min,水泵出口壓力為0.2 MPa。將PLC 控制系統與最小二乘法控制系統相結合,對閥門排量變化進行了對比分析。選取曲線上的隨機一點作為實驗點,以保證兩臺泵的調頻接近甚至相同。
3.1 閥門位移變化
在基于最小二乘法的供水泵站變頻控制系統上進行多次拉伸、壓縮實驗,使閥門出現位移,對比結果如圖6 所示。

圖6 不同方法閥門位移對比結果
由圖6 可知,使用基于PLC 技術控制系統在變頻控制時間為10 s 時,系統出現了多次位移,隨著位移量增大,最大可達到0.085 mm,說明使用該系統已經很難承載大功率負荷液壓變頻需求。而使用基于最小二乘法系統在確保液壓變頻的同時,降低了閥門負荷,避免多次大幅度變化的位移。
3.2 水泵容積效率
文中對比了基于PLC 技術控制系統和基于最小二乘法控制系統分析水泵容積效率,對比結果如圖7所示。
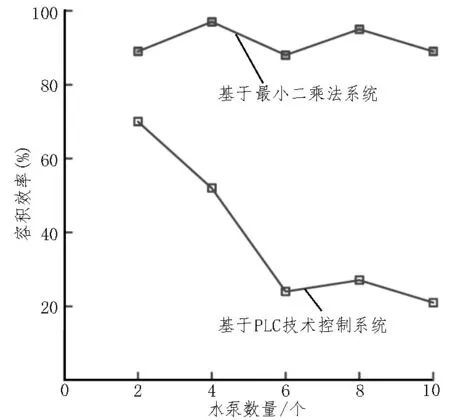
圖7 不同方法水泵容積效率對比結果
由圖7 可知,基于PLC 技術控制系統水泵因大功率負荷,使得輸出矩陣逐漸下降,說明該系統難以達到多次拉伸需求,系統具有明顯瑕疵;文中使用基于最小二乘法控制系統通過控制曲面流量,能夠進行有效的調節,容積效率明顯高于基于PLC 技術控制系統。
4 結束語
基于最小二乘法的供水泵站變頻控制系統的水泵采用先開后關的循環型工作方式,工作泵和備用泵不固定,防止設備生銹,并且采用無級變速,通過減少水量調節系統的狀態參數,其具有節能、可靠、自動化程度高等優點,該系統可以替代傳統的水塔、高位水箱、氣缸等供水方式,具有較好的經濟和技術效益,應用前景廣闊。
猜你喜歡
流程工業(2022年3期)2022-06-23 09:41:08
湖南水利水電(2021年6期)2022-01-18 06:07:40
煤氣與熱力(2021年3期)2021-06-09 06:16:18
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2017年7期)2017-06-05 09:36:13
河南水利年鑒(2017年0期)2017-05-19 02:32:09
河南水利年鑒(2016年0期)2016-08-03 05:01:40
河南水利年鑒(2015年0期)2015-08-16 04:25:49
中學科技(2014年11期)2014-12-25 07:38:53