基于影像融合和面向?qū)ο蠓诸?lèi)的礦區(qū)提取研究*
2022-06-13 07:53:34王法景
科技與創(chuàng)新 2022年11期
李 飛,王法景
(楊凌職業(yè)技術(shù)學(xué)院,陜西 咸陽(yáng)712100)
礦產(chǎn)資源開(kāi)發(fā)遙感調(diào)查主要采用人機(jī)交互式目視解譯法提取信息,但該方法要求判讀人員具有較多的先驗(yàn)知識(shí),與GⅠS集成困難,與工具庫(kù)不支持[1-3]。文中采用面向?qū)ο蠓诸?lèi)法提出了新方法。1973年,HARACLⅠCK提出紋理分割算法[4],但僅適用于有限的圖像類(lèi)型。張峰等將面向?qū)ο蟮姆诸?lèi)方法應(yīng)用于耕地信息提取,分析結(jié)果精度達(dá)到90%。莫登奎等利用基于面向?qū)ο蟮姆诸?lèi)方法,多尺度分割ⅠKONOS影像,證明了此方法發(fā)展前景廣闊[5-7]。黎新亮等針對(duì)QuickBird影像,采用面向?qū)ο笈c最鄰近監(jiān)督相結(jié)合的分類(lèi)方法提取影像信息,對(duì)影像進(jìn)行信息提取,結(jié)果表明該方法能較好地改善分類(lèi)結(jié)果。面向?qū)ο蟮姆诸?lèi)方法主要是對(duì)遙感影像進(jìn)行分割,得到同質(zhì)對(duì)象,再根據(jù)遙感分類(lèi)或目標(biāo)地物提取的具體要求,檢測(cè)和提取目標(biāo)的多種特征(如光譜、形狀、紋理、陰影、空間位置等),再利用模糊分類(lèi)方法對(duì)遙感影像進(jìn)行分類(lèi)和地物目標(biāo)的提取。
本文采用面向?qū)ο蟮姆诸?lèi)法是基于TM影像和SPOT數(shù)據(jù)融合后的數(shù)據(jù),由于TM數(shù)據(jù)包含大量的光譜信息,而高分辨率SPOT數(shù)據(jù)能很好地體現(xiàn)地物的紋理、形狀等特征。融合后的影像不但具有豐富的光譜特征,還具有高分辨率,因此采用面向?qū)ο蟮姆诸?lèi)法不但能很好利用地物的光譜信息來(lái)提取地物,還能通過(guò)紋理、形狀等特征來(lái)提取地物。面向?qū)ο蟮姆诸?lèi)法具有以下優(yōu)點(diǎn):利用對(duì)象的多特征,不但可以利用分割后影像豐富的光譜特征,還可以利用其紋理、面積等特征來(lái)進(jìn)行分類(lèi);可用不同的分割尺度生成不同尺度的影像對(duì)象層,所有地物類(lèi)別并不是在同一尺度的影像中進(jìn)行提取,而是在其最適宜的尺度層中提取,充分利用遙感影像的蘊(yùn)含信息。面向?qū)ο蟮姆诸?lèi)法克服了傳統(tǒng)分類(lèi)方法的缺陷,傳統(tǒng)的分類(lèi)方法幾乎都是基于對(duì)象元的處理,不同的影像目標(biāo)處理均在同一尺度層次內(nèi)進(jìn)行;而面向?qū)ο蠓诸?lèi)方法是針對(duì)具有相同特征,如光譜、紋理和空間綜合等特征的“同質(zhì)均一”的對(duì)象單元,可以根據(jù)不同的分割尺度在不同尺度層次上對(duì)地物進(jìn)行逐層分類(lèi),可以使影像分類(lèi)充分利用影像的多種信息,分類(lèi)結(jié)果更合理,也更適合高分辨率遙感影像的分類(lèi)。
1 研究區(qū)概況及研究思路
1.1 研究區(qū)概況
本文采用的是將TM和SPOT數(shù)據(jù)融合后的數(shù)據(jù),選取攀枝花市部分礦區(qū)進(jìn)行研究。選取研究區(qū)域的中心經(jīng)緯度為107°2′48″E,26°0′15″N。由于是6月份的SPOT數(shù)據(jù),因此周?chē)脖幻ⅲ泻恿鹘?jīng)過(guò),在河流兩邊分布有居民建筑。
1.2 研究思路
本次研究思路主要是獲取TM數(shù)據(jù)和SPOT數(shù)據(jù)并進(jìn)行影像融合,對(duì)融合后圖像進(jìn)行效果評(píng)價(jià),選取適合礦區(qū)提取研究的融合方法。選擇最優(yōu)分割尺度對(duì)融合后的影像進(jìn)行分割,得到“同質(zhì)對(duì)象”,建立分類(lèi)規(guī)則、影像分類(lèi),并對(duì)根據(jù)2種方法得出的分類(lèi)結(jié)果進(jìn)行精度對(duì)比,最終得出實(shí)驗(yàn)結(jié)果。
2 影像融合
采用SPOT影像與TM影像融合既可以提高圖像的空間分辨率,又可以充分利用光譜特征。
2.1 HIS融合
HⅠS方法原理是用空間分辨率較高的全色圖像代替空間分辨率較低的多光譜圖像的亮度成分Ⅰ[8-9]。
2.2 色彩標(biāo)準(zhǔn)化變換融合(BROVEY變換融合)
BROVEY算法是多保留原多光譜數(shù)據(jù),將多光譜影像中的色彩、亮度成分進(jìn)行分解計(jì)算,使影像轉(zhuǎn)換系數(shù)簡(jiǎn)單化[10-11]。
2.3 Pansharp方法
Pansharp方法是采用最小二乘逼近法,對(duì)源多光譜影像與全色影像灰度值進(jìn)行解算,融合多光譜影像的光譜信息和較高空間分辨率影像的高頻信息[12-13],并且可對(duì)單個(gè)或多個(gè)波段進(jìn)行融合操作。
2.4 影像融合后效果評(píng)價(jià)
圖像質(zhì)量評(píng)價(jià)采用主觀和客觀評(píng)價(jià)2種辦法。通常根據(jù)圖像的均方誤差、邊緣強(qiáng)度、信息熵等標(biāo)準(zhǔn)來(lái)進(jìn)行評(píng)價(jià)。3種融合方法都能提高圖像的分辨率,看清圖像的紋理特征,但是評(píng)價(jià)圖像包含的信息量時(shí)比較主觀。因此要客觀評(píng)價(jià)圖像的融合效果,本文基于圖像的光譜信息和紋理特征進(jìn)行面向?qū)ο蟮姆诸?lèi),因此可以從信息熵和平均梯度方面對(duì)融合后的圖像效果進(jìn)行客觀評(píng)價(jià)。
2.4.1 信息熵
信息熵表示信號(hào)中信息量的多少,其多少反映融合效果,越多效果越好[14]。
2.4.2 平均梯度
平均梯度反映圖像清晰度和微小細(xì)節(jié)反差。
影像融合方法比較如表1所示。通過(guò)表1可以看出3種方法融合大體上差別不大,平均梯度都很接近,說(shuō)明3種方法都很好地提高了圖像的分辨率,突出了圖像的紋理特征。Pansharp融合和HⅠS融合后的圖像清晰度要比BROVEY變換融合后的圖像清晰度高。Pansharp融合的信息熵相對(duì)于其他2種融合方法要大一點(diǎn),因此Pansharp融合后的圖像包含的信息量更多,保留了更多圖像光譜信息。由于融合方法的不同,HⅠS融合和BROVEY變換都只能進(jìn)行3個(gè)波段融合而Pansharp融合沒(méi)有波段的限制,可以進(jìn)行波段運(yùn)算,能更好地建立分類(lèi)規(guī)則,因此本文選取的融合方法是Pansharp融合。
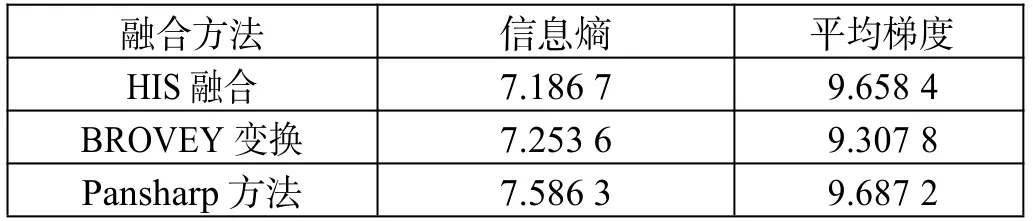
表1 影像融合方法比較
3 面向?qū)ο蟮牡V區(qū)信息提取
面向?qū)ο笫峭ㄟ^(guò)“像元-對(duì)象”的計(jì)算過(guò)程分割影像,獲得分類(lèi)結(jié)果[15]。研究區(qū)域采用目視判讀方法,分出植被、水體、排土場(chǎng)、建設(shè)用地、礦區(qū)5種地物。研究區(qū)內(nèi)的河流呈條帶狀,因此在建立規(guī)則時(shí)可以用長(zhǎng)寬比(length/width)來(lái)分出河流。礦區(qū)占地面積大,在建立規(guī)則時(shí)可以用面積(area)來(lái)區(qū)別礦區(qū)居民點(diǎn)。建設(shè)用地多為居民地,結(jié)構(gòu)分布復(fù)雜,多為零散分布的不細(xì)塊狀,圖像上的亮度較高。植被沒(méi)有明顯的紋理,但可以通過(guò)NDVⅠ來(lái)區(qū)分,同時(shí)植被覆蓋度廣,可以通過(guò)面積(area)來(lái)減小錯(cuò)分的概率。分割尺度過(guò)大過(guò)小都會(huì)降低地類(lèi)提取的精度,尺度過(guò)大,不同的地物類(lèi)別有同一對(duì)象內(nèi)像元素;尺度過(guò)小,很難分清地物類(lèi)別。經(jīng)過(guò)嘗試多種不同尺度分割,最終確定在分割尺度為100時(shí),同質(zhì)對(duì)象之間的光譜差異明顯,并且同一對(duì)象內(nèi)不會(huì)包含多種地物類(lèi)別。
4 礦區(qū)提取結(jié)果與精度評(píng)價(jià)
4.1 礦區(qū)提取結(jié)果及分析
利用eCognition軟件對(duì)面向?qū)ο筮M(jìn)行分類(lèi),得到面向?qū)ο蠓诸?lèi)的礦區(qū)提取結(jié)果圖。但是由于分割尺度選取的較大,導(dǎo)致出現(xiàn)了“淹沒(méi)”現(xiàn)象,部分水體被分割到其他地物對(duì)象里,但本次研究是對(duì)礦區(qū)的提取,面向?qū)ο蠛芎玫靥崛〕鲅芯繀^(qū)的礦區(qū),達(dá)到預(yù)期要求。制作礦區(qū)自動(dòng)分類(lèi)的專(zhuān)題圖,基于像元的最大似然法不能很好地區(qū)分出礦區(qū)和建設(shè)用地,而面向?qū)ο笠驗(yàn)楹芎玫乩昧说匚锏募y理特征,因此可區(qū)分出礦區(qū)和建設(shè)用地。但是面向?qū)ο蠓诸?lèi)時(shí)在影像分割時(shí)選取的分割尺度為100,而在本研究區(qū)域內(nèi)河流呈細(xì)條帶狀,因此在劃分“同質(zhì)對(duì)象”時(shí)把一部分水體分割到建設(shè)用地占大多數(shù)的對(duì)象中。在圖像最下面的“礦區(qū)”,因?yàn)槟瞧ㄔO(shè)用地相對(duì)集中,沒(méi)有呈現(xiàn)碎斑狀,而且在光譜特征方面與礦區(qū)較接近,無(wú)法從光譜特征和紋理特征方面來(lái)區(qū)分,因此錯(cuò)把那些建設(shè)用地分成“礦區(qū)”,屬于錯(cuò)分。
4.2 精度評(píng)價(jià)
4.2.1 礦區(qū)提取后精度分析
面向?qū)ο蠓诸?lèi)很好地提取出了建設(shè)用地和排土場(chǎng),沒(méi)有出現(xiàn)建設(shè)用地和礦區(qū)混在一起的情況。但還是有極少部分的礦區(qū)和排土場(chǎng)與其他地物混到一起,這是因?yàn)榉指畛叨鹊脑颍瑢?duì)于某一特定分割尺度,難以精確表示每個(gè)地物,特別在地物內(nèi)部。因此今后可以考慮利用多尺度分割的方法來(lái)進(jìn)行面向?qū)ο蟮姆指睢?/p>
4.2.2 誤差比較
根據(jù)分類(lèi)結(jié)果的精度,可得到總體精度、準(zhǔn)確度、Kappa系數(shù)及制造者等信息,通過(guò)混淆矩陣來(lái)體現(xiàn)[16]。利用最大似然法分類(lèi)的Kappa系數(shù)與目視解譯融合后圖像獲得的地表真實(shí)感興趣區(qū)(ROⅠ)計(jì)算混淆矩陣,計(jì)算結(jié)果為0.81。評(píng)價(jià)面向?qū)ο蟮姆诸?lèi)結(jié)果精度,隨機(jī)抽取研究區(qū)內(nèi)270個(gè)樣本[17],每個(gè)地類(lèi)至少抽取50個(gè),得到的誤差矩陣如表2所示。

表2 研究區(qū)面向?qū)ο蠓诸?lèi)結(jié)果精度評(píng)價(jià)誤差矩陣
通過(guò)對(duì)比面向?qū)ο蠓诸?lèi)和最大似然法分類(lèi)的Kappa系數(shù)可以看到,利用面向?qū)ο蟮姆诸?lèi)方法進(jìn)行礦區(qū)提取的分類(lèi)精度更高一些。因?yàn)榛谙裨淖畲笏迫环ㄒ壮霈F(xiàn)混分,而面向?qū)ο笠蚪Y(jié)合考慮光譜、形狀、紋理信息,分類(lèi)效果更好。
5 結(jié)語(yǔ)
采用專(zhuān)門(mén)的面向?qū)ο蠓诸?lèi)的礦區(qū)遙感分類(lèi),運(yùn)用模糊分類(lèi)規(guī)則模型和成員函數(shù)法構(gòu)建分類(lèi)規(guī)則來(lái)實(shí)現(xiàn)礦區(qū)自動(dòng)提取。同時(shí)構(gòu)建分類(lèi)樣本體系,選取合適的樣本來(lái)進(jìn)行礦區(qū)提取。
通過(guò)Kappa系數(shù)得出面向?qū)ο蟮姆诸?lèi)精度要大于最大似然法;對(duì)研究區(qū)域進(jìn)行SPOT影像和TM影像的融合,在保留地物光譜信息的條件下,提高空間分辨率。基于面向?qū)ο笫腔跇?gòu)建類(lèi)似決策樹(shù)的規(guī)則來(lái)實(shí)現(xiàn)影像分類(lèi),最大似然法基于地物的光譜特征來(lái)建立分類(lèi)體系,選取分類(lèi)樣本來(lái)進(jìn)行分類(lèi),而建設(shè)用地和礦區(qū)以及排土場(chǎng)三者之間在圖像上的像元亮度值很接近,不好區(qū)分,因此會(huì)產(chǎn)生“混分”的結(jié)果。而面向?qū)ο蠓诸?lèi)不但可以從地物的光譜方面,還可以從地物的紋理、形狀等特征來(lái)建立分類(lèi)規(guī)則。因此建立的規(guī)則更加完善,對(duì)地物的分類(lèi)也更準(zhǔn)確。面向?qū)ο蠓诸?lèi)最主要的是對(duì)影像的分割,分類(lèi)的對(duì)象不再是像元級(jí)而是一個(gè)集合的對(duì)象,杜絕“碎斑”現(xiàn)象,分類(lèi)結(jié)果更優(yōu)。但是分割尺度選擇太小會(huì)出現(xiàn)把一個(gè)地物分割成幾個(gè)對(duì)象的情況,分割尺度選擇太大會(huì)出現(xiàn)一個(gè)對(duì)象類(lèi)包含其他地物的情況。而且針對(duì)不同的地物一個(gè)分割尺度不可能把每個(gè)地物都完美地分割出來(lái),本文的分割尺度選取能很好地把同一地物分到同一“對(duì)象”中,但還是有部分水體被分到其他地物對(duì)象中。今后可以嘗試選用多尺度分割,建立多個(gè)圖層,逐層提取地物,提高分類(lèi)效果。
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34