基于矩陣法的曲柄連桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析
2022-06-12 02:07:18林瑾
關(guān)鍵詞:分析
林 瑾
(無(wú)錫商業(yè)職業(yè)技術(shù)學(xué)院,江蘇 無(wú)錫 214153)
引 言
機(jī)械設(shè)計(jì)是機(jī)械生產(chǎn)的第一步.一部機(jī)器質(zhì)量的優(yōu)劣,首先取決于設(shè)計(jì)質(zhì)量,而在機(jī)械設(shè)計(jì)環(huán)節(jié)中工作量最大、最重要的是機(jī)械結(jié)構(gòu)設(shè)計(jì)[1].機(jī)械結(jié)構(gòu)設(shè)計(jì)需要綜合考慮機(jī)械產(chǎn)品的工作性能、使用要求、制造成本、材料性能等因素,只有這樣才能在諸多限定條件下設(shè)計(jì)出最優(yōu)性能的機(jī)械.但有些因素之間會(huì)產(chǎn)生互相矛盾,比如,工作性能與使用要求、制造成本與材料性能等,因此,設(shè)計(jì)過(guò)程中不能將各方面因素作片面化分析.為了使機(jī)械產(chǎn)品性能達(dá)到較高水平,必須深入探討每一個(gè)設(shè)計(jì)環(huán)節(jié),對(duì)于復(fù)雜、多解的設(shè)計(jì)方案,需要不斷修改、優(yōu)化和完善,這些都離不開(kāi)機(jī)構(gòu)分析和機(jī)構(gòu)綜合[2].
機(jī)構(gòu)分析和機(jī)構(gòu)綜合常用的方法有圖解法和解析法.進(jìn)行傳統(tǒng)設(shè)計(jì)時(shí),圖解法用得較多,但此方法作圖復(fù)雜且精度不高.隨著現(xiàn)代計(jì)算機(jī)輔助設(shè)計(jì)和優(yōu)化設(shè)計(jì)的發(fā)展,解析法的應(yīng)用越來(lái)越廣泛,其可將機(jī)構(gòu)的位置、速度、加速度等問(wèn)題轉(zhuǎn)化為數(shù)學(xué)問(wèn)題來(lái)解決.機(jī)構(gòu)的結(jié)構(gòu)參數(shù)、運(yùn)動(dòng)參數(shù)也可使用數(shù)學(xué)解析式來(lái)進(jìn)行描述,以便于在機(jī)械設(shè)計(jì)時(shí),進(jìn)行深入分析,確保設(shè)計(jì)的科學(xué)性[3-4].
解析法設(shè)計(jì)時(shí),常用矩陣?yán)碚撟鳛樘幚頂?shù)據(jù)的工具,以解決計(jì)算工作量過(guò)大的難題.應(yīng)用矩陣作為工具對(duì)機(jī)構(gòu)進(jìn)行解析法分析時(shí),可將機(jī)構(gòu)當(dāng)作一個(gè)質(zhì)點(diǎn)系,對(duì)于機(jī)構(gòu)中的運(yùn)動(dòng)副以桿長(zhǎng)作為約束條件,建立非線性方程組,從而求解出機(jī)構(gòu)的各點(diǎn)位置,進(jìn)而可以對(duì)速度和加速度進(jìn)行分析求解[5].
1 運(yùn)動(dòng)分析基礎(chǔ)
以平面連桿機(jī)構(gòu)為例,分析機(jī)構(gòu)運(yùn)動(dòng)情況,確定機(jī)構(gòu)運(yùn)動(dòng)特性.將平面連桿機(jī)構(gòu)用一種特殊的圖形來(lái)描述,把機(jī)構(gòu)中的各個(gè)構(gòu)件當(dāng)做圖形的邊界,運(yùn)動(dòng)副當(dāng)做是圖形的頂點(diǎn).將機(jī)構(gòu)用圖形來(lái)描述后,圖形中的邊界和頂點(diǎn)可以用矩陣來(lái)表示,比如,平面圖形中,可以用點(diǎn)的坐標(biāo)或者向量的坐標(biāo)作為矩陣的參數(shù)值:
利用坐標(biāo)值可進(jìn)行平面連桿機(jī)構(gòu)的位移分析,建立位移方程,這是平面連桿機(jī)構(gòu)運(yùn)動(dòng)分析的基礎(chǔ),其涉及非線性方程的計(jì)算[6].在位移方程的基礎(chǔ)上對(duì)時(shí)間求一階導(dǎo)數(shù),可以得到速度方程,求二階導(dǎo)數(shù),可以得到加速度方程,這些都是線性方程.
2 平面四桿機(jī)構(gòu)運(yùn)動(dòng)分析
圖1所示是常見(jiàn)的平面四桿機(jī)構(gòu)ABCD,以運(yùn)動(dòng)副A所在位置為原點(diǎn)建立直角坐標(biāo)系,x軸沿著桿AD的方向.根據(jù)矩陣在機(jī)構(gòu)中的應(yīng)用,先用矢量法建立機(jī)構(gòu)的位置方程.
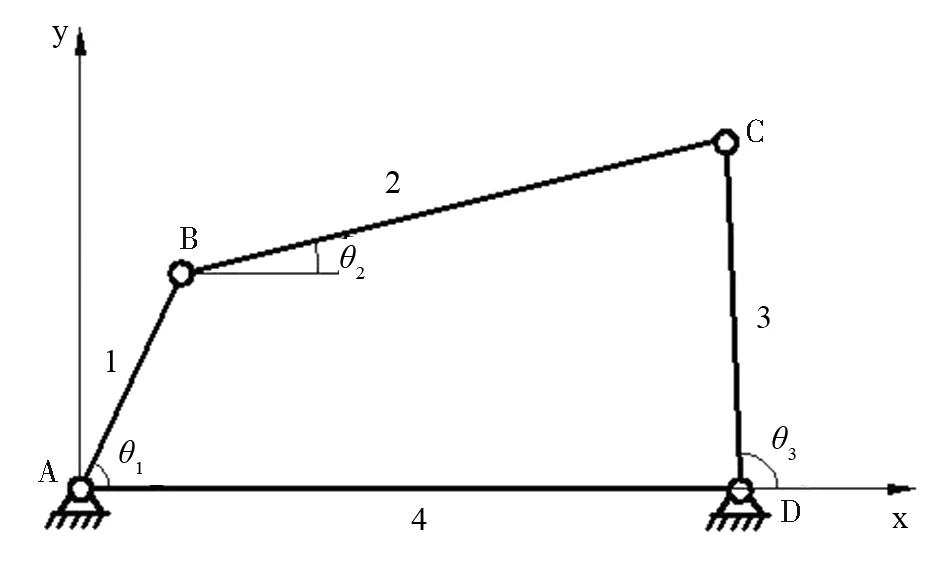
圖1 平面四桿機(jī)構(gòu)
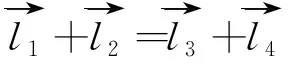
設(shè)四根構(gòu)件的長(zhǎng)度分別為l1、l2、l3和l4,構(gòu)件的方位角度為θ1、θ2、θ3和θ4.桿4沿著x軸的方向,因此θ4=0.四桿件組成封閉的矢量多邊形,矢量和等于零,封閉矢量表達(dá)式為:
(1)
以封閉矢量表達(dá)式為依據(jù),位置方程的分量形式可寫成:
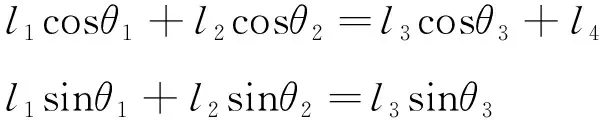
(2)
從式(2)的x軸和y軸分解向量中,可以求得方位角度的代數(shù)式,由此描述各桿件的位置.位置方程可用矩陣形式表示為:

(3)
式(2)閉環(huán)矢量方程分量形式對(duì)時(shí)間求一階導(dǎo)數(shù),就可得到平面四桿機(jī)構(gòu)的速度方程:

(4)
由式(4)可求解出各從動(dòng)桿的角速度,從而為機(jī)構(gòu)的運(yùn)動(dòng)學(xué)分析提供數(shù)據(jù)支持.
若需要使用計(jì)算機(jī)來(lái)分析機(jī)構(gòu)的速度及加速度情況,可將式(4)用矩陣形式進(jìn)行描述.為了表述時(shí)更加清晰,將機(jī)構(gòu)中原動(dòng)件桿1的參數(shù)置于矩陣等式右側(cè),將從動(dòng)件桿2和從動(dòng)桿3的參數(shù)置于矩陣左側(cè),矩陣形式如下:

(5)
速度矩陣的表達(dá)式可簡(jiǎn)寫為:[A][ω]=ω1[B]
(6)
為進(jìn)一步分析機(jī)構(gòu)的運(yùn)動(dòng)情況,可對(duì)式(5)繼續(xù)求二階導(dǎo)數(shù),便可以得到如下平面四桿機(jī)構(gòu)的加速度矩陣表達(dá)式:

(7)
(8)
采用上述方式,可分析平面四桿機(jī)構(gòu)中某個(gè)定點(diǎn)的運(yùn)動(dòng)情況,求出該點(diǎn)的位置方程、速度方程和加速度方程,從而計(jì)算出該點(diǎn)的速度和運(yùn)動(dòng)角度.
3 曲柄連桿機(jī)構(gòu)運(yùn)動(dòng)分析
如圖2所示,在往復(fù)式內(nèi)燃機(jī)中,曲柄連桿機(jī)構(gòu)是核心的傳動(dòng)機(jī)構(gòu),它是內(nèi)燃機(jī)燃燒的場(chǎng)所.曲柄連桿機(jī)構(gòu)可以將燃料燃燒后所產(chǎn)生的熱能轉(zhuǎn)化為機(jī)械能,完成能量轉(zhuǎn)換.在做功行程中,曲柄連桿機(jī)構(gòu)將活塞的往復(fù)運(yùn)動(dòng)轉(zhuǎn)化為曲軸的旋轉(zhuǎn)運(yùn)動(dòng),對(duì)外輸出動(dòng)力.在進(jìn)氣、壓縮和排氣行程中,曲柄連桿機(jī)構(gòu)將曲軸的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為活塞的往復(fù)直線運(yùn)動(dòng),從而實(shí)現(xiàn)工作循環(huán).
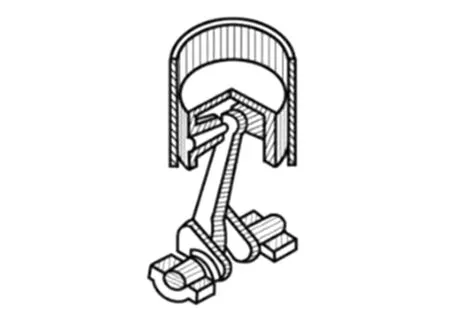
圖2 曲柄連桿機(jī)構(gòu)
曲柄連桿機(jī)構(gòu)的工作條件十分惡劣,需要承受高溫、化學(xué)腐蝕以及周期性變化的沖擊載荷.如果在工作中,曲柄連桿機(jī)構(gòu)出現(xiàn)故障,將會(huì)使發(fā)動(dòng)機(jī)其他部件發(fā)生損壞,引發(fā)嚴(yán)重的安全事故.因此,曲柄連桿機(jī)構(gòu)的結(jié)構(gòu)設(shè)計(jì)和材料選用要求相當(dāng)高,它的結(jié)構(gòu)和性能直接影響發(fā)動(dòng)機(jī)品質(zhì)的優(yōu)劣[7].
曲柄連桿機(jī)構(gòu)由曲軸、連桿和活塞組成,分為中心式和偏心式兩種.圖3為曲柄連桿機(jī)構(gòu)運(yùn)動(dòng)簡(jiǎn)圖.圖3(a)機(jī)構(gòu)中心線經(jīng)過(guò)了曲軸的旋轉(zhuǎn)中心,這是中心式曲柄連桿機(jī)構(gòu),圖3(b)機(jī)構(gòu)中心與曲軸旋轉(zhuǎn)中心偏離了一段距離,這是偏心式曲柄連桿機(jī)構(gòu).
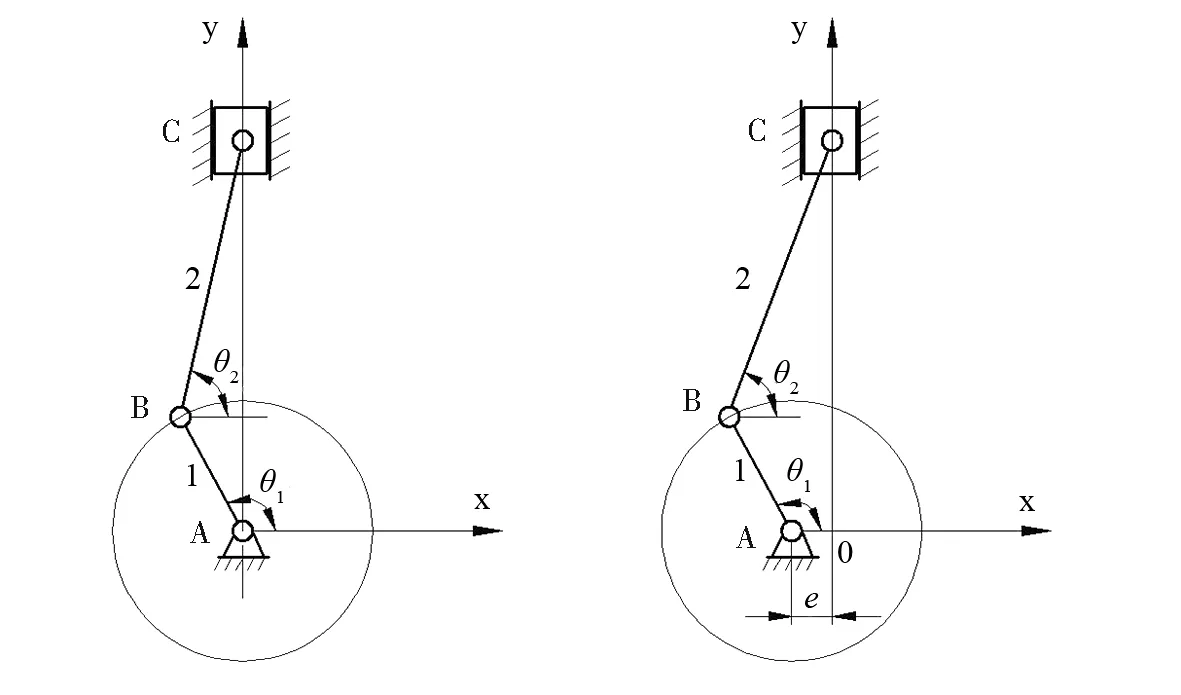
(a)中心式曲柄連桿機(jī)構(gòu) (b)偏心式曲柄連桿機(jī)構(gòu) 圖3 曲柄連桿機(jī)構(gòu)運(yùn)動(dòng)簡(jiǎn)圖
進(jìn)氣行程中,該機(jī)構(gòu)通過(guò)曲軸1的勻速轉(zhuǎn)動(dòng),帶動(dòng)連桿2轉(zhuǎn)動(dòng),從而推動(dòng)活塞C在移動(dòng)副約束下,沿著設(shè)定的軌跡往復(fù)直線運(yùn)動(dòng).用上述矩陣法分析曲柄連桿機(jī)構(gòu)活塞C的運(yùn)動(dòng)情況,了解運(yùn)動(dòng)的具體行程和速度,可為曲柄連桿機(jī)構(gòu)設(shè)計(jì)提供重要的參考數(shù)據(jù).
3.1 位置分析
在圖3的機(jī)構(gòu)簡(jiǎn)圖中,設(shè)定曲柄1和連桿2長(zhǎng)度分別為l1、l2,對(duì)應(yīng)方位角度為θ1、θ2.活塞運(yùn)行方向與y軸重合,設(shè)定x軸正向?yàn)闄C(jī)構(gòu)運(yùn)動(dòng)的起始軸線,機(jī)構(gòu)轉(zhuǎn)動(dòng)的正方向?yàn)槟鏁r(shí)針?lè)较?
下文以偏心式曲柄連桿機(jī)構(gòu)為例,描述進(jìn)氣行程中機(jī)構(gòu)運(yùn)動(dòng)情況.由于偏心式曲柄連桿機(jī)構(gòu)的內(nèi)燃機(jī)中心線和曲軸的中心線不重合,故設(shè)定偏心距為e.
將偏心式曲柄連桿機(jī)構(gòu)應(yīng)用ABCO封閉圖形來(lái)分析(O為C點(diǎn)在x軸上的投影),封閉圖形用矢量表達(dá)式可描述為:

(9)
若AO沿著x軸正方向,OC沿著y軸正方向,由圖形封閉性可得到該機(jī)構(gòu)的位置方程為:
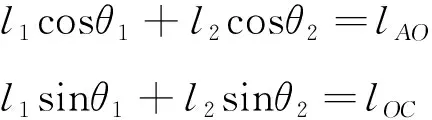
(10)
在式(10)中l(wèi)AO和1、2桿的桿長(zhǎng)均為固定值,由兩個(gè)方程式可求得活塞C的運(yùn)動(dòng)軌跡和從動(dòng)桿2的方位角.
3.2 速度分析
若需要分析曲柄連桿機(jī)構(gòu)中活塞C的運(yùn)動(dòng)速度情況,可對(duì)式(10)求時(shí)間t的一階導(dǎo)數(shù),得速度方程如下:
(11)
進(jìn)氣行程中,曲柄1為原動(dòng)件,將其參數(shù)置于等式右側(cè),其余從動(dòng)件參數(shù)置于等式左側(cè),得到速度矩陣為:

(12)

由式(12)可得知活塞C的速度,并可求得連桿2的角速度.
3.3 加速度分析
式(12)繼續(xù)對(duì)時(shí)間t求一階導(dǎo)數(shù),可得加速度矩陣為:

(13)
由式(13)可求得活塞C的加速度,并可求得連桿2的角加速度.
通過(guò)以上運(yùn)動(dòng)分析,可得到進(jìn)氣行程中連桿和活塞的運(yùn)動(dòng)參數(shù),當(dāng)需要對(duì)做功行程進(jìn)行運(yùn)動(dòng)分析時(shí),可參照以上方法進(jìn)行推導(dǎo).由矩陣分析得出的各項(xiàng)參數(shù)可為曲柄連桿機(jī)構(gòu)的動(dòng)力分析及強(qiáng)度校核提供數(shù)據(jù)支持.
4 曲柄連桿機(jī)構(gòu)運(yùn)動(dòng)仿真
隨著軟件技術(shù)的發(fā)展,連桿機(jī)構(gòu)的運(yùn)動(dòng)學(xué)仿真應(yīng)用越來(lái)越普遍.在使用牛頓經(jīng)典力學(xué)完整分析連桿機(jī)構(gòu)的運(yùn)動(dòng)情況、建立矢量方程和矩陣后,可以很方便地應(yīng)用計(jì)算機(jī)軟件來(lái)建立連桿機(jī)構(gòu)的仿真模型,從而對(duì)連桿機(jī)構(gòu)的運(yùn)動(dòng)和工作情況進(jìn)行仿真分析,模擬工作情況,預(yù)測(cè)工作性能.仿真分析可應(yīng)用于連桿機(jī)構(gòu)的設(shè)計(jì)階段,可視化的結(jié)果有助于提高連桿機(jī)構(gòu)的設(shè)計(jì)效率.
MATLAB 軟件是一種交互式計(jì)算分析軟件,該軟件具有科學(xué)計(jì)算、程序設(shè)計(jì)、圖形繪制等多種功能.利用該軟件強(qiáng)大的矩陣運(yùn)算分析功能,可在眾多的數(shù)據(jù)中獲取最優(yōu)結(jié)果,輕松完成連桿機(jī)構(gòu)的仿真分析過(guò)程,并有效提高連桿機(jī)構(gòu)的設(shè)計(jì)水平和質(zhì)量.
將上述曲柄連桿機(jī)構(gòu)的矢量方程和矩陣用MATLAB 的計(jì)算工具來(lái)求值,結(jié)合其可視化手段,將計(jì)算值擬合成曲線,可得到曲柄連桿機(jī)構(gòu)的運(yùn)動(dòng)仿真軌跡.
選取某一型號(hào)發(fā)動(dòng)機(jī)參數(shù)如下:曲軸半徑l1=57.5 mm,連桿長(zhǎng)度l2=210 mm,活塞高度h=32.5 mm,曲軸偏移e=13 mm.
假定機(jī)架為參考系,曲柄與x軸重合,活塞行程設(shè)為s.非線性超越方程組如下:

(14)
根據(jù)式(14)創(chuàng)建函數(shù)crankshaft,其格式如下:
function t=crankshaft(th,th1,L1,L2,e)
t=[L1*cos(th1)+L2*cos(th(1))-e;L1*sin(th1)+L2*sin(th(1))-th(2)];
在MATLAB中應(yīng)用軟件自帶的fsolve函數(shù),調(diào)用上述crankshaft函數(shù),可求解出連桿2對(duì)應(yīng)方位角度θ2和活塞行程s,這部分運(yùn)行程序如下:
th23(m,:)=fsolve('crankshaft',[1 1],options,th1(m),L1,L2,e)];
為了直觀顯示出相關(guān)參數(shù),可利用MATLAB中plot命令來(lái)繪制連桿2運(yùn)動(dòng)仿真圖形,繪圖的程序如下:
plot([x;xx],[y;yy],'k',[0 L1],[0 0],'k--^',x,y,'ko',xx,yy,'ks')];
在上述程序完全運(yùn)行后,繪制出連桿的運(yùn)動(dòng)仿真位置,如圖4所示.從圖4中可清楚了解連桿的運(yùn)行路徑,為運(yùn)動(dòng)過(guò)程分析提供基礎(chǔ)數(shù)據(jù).
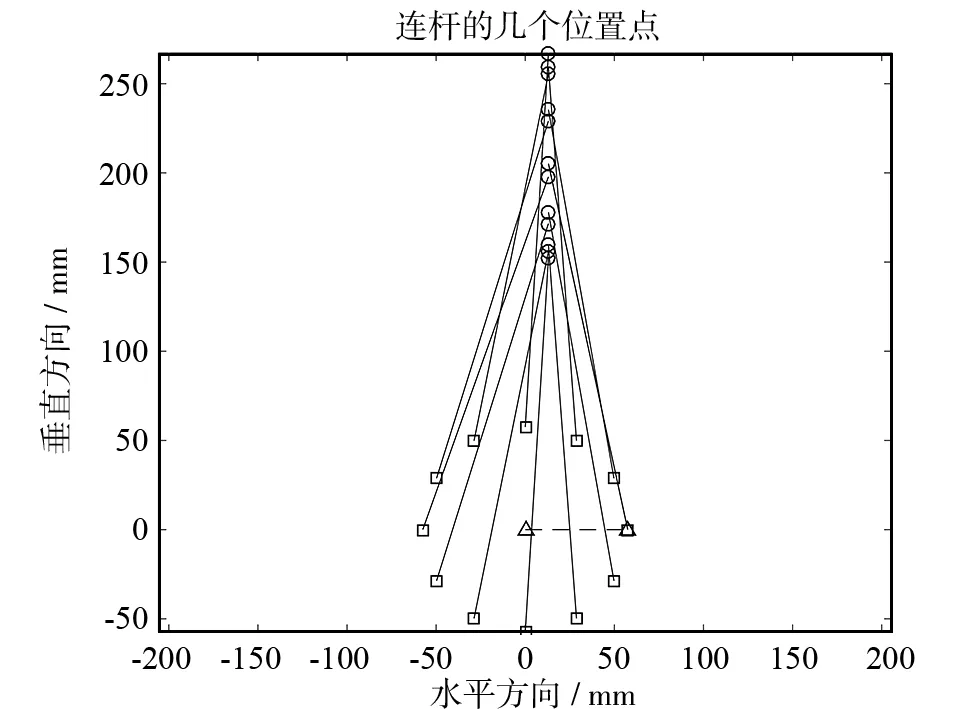
圖4 連桿仿真位置
根據(jù)式(12),可利用上述fsolve函數(shù)以及inv函數(shù)、plot命令繪制θ2和s的仿真曲線圖,直觀描述曲軸勻速轉(zhuǎn)動(dòng)時(shí),連桿2對(duì)應(yīng)方位角度θ2以及活塞行程s的變化情況,主要程序指令如下:
plot(th1,th23(:,1));
axis([0 2*pi 0 0.94*pi]);
w1=250;
for i=1:length(th1);
A=[-L2*sin(th23(i,1)) 0;-L2*cos(th23(i,1)) 1];
B=[w1*L1*sin(th1); w1*L1*cos(th1)];
w=inv(A)*B;
繪制出曲柄連桿機(jī)構(gòu)中連桿的角位移仿真曲線圖和活塞位移仿真曲線圖,如圖5和圖6所示.
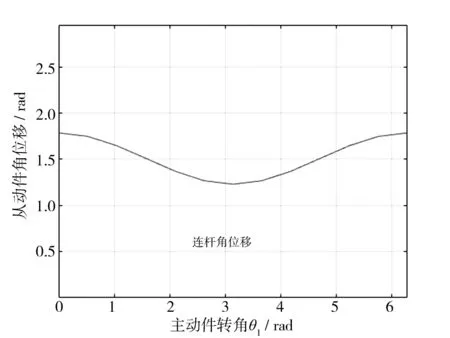
圖5 連桿角位移仿真曲線圖
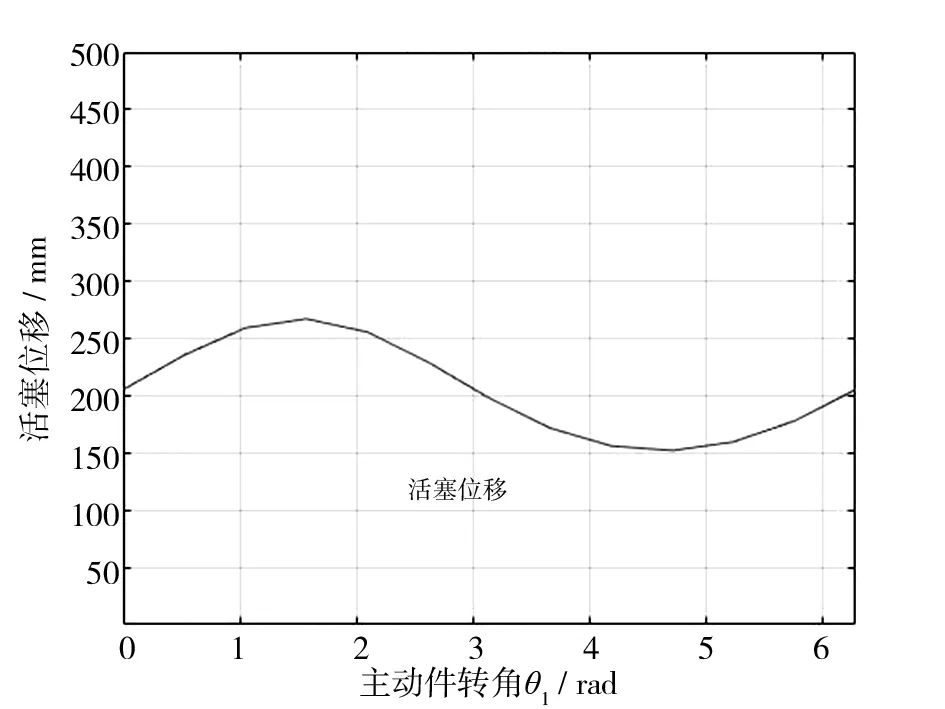
圖6 活塞位移仿真曲線圖
5 結(jié)論
矩陣可以表達(dá)構(gòu)件的坐標(biāo)位置,還可用于描述位移、速度、加速度等參數(shù)的變化情況.文中利用矩陣分析內(nèi)燃機(jī)中曲柄連桿機(jī)構(gòu)的運(yùn)動(dòng)學(xué)規(guī)律,先建立機(jī)構(gòu)矢量方程,再通過(guò)矩陣獲取活塞、連桿的位移、速度、加速度等運(yùn)動(dòng)參數(shù),最后可將矢量方程和矩陣用計(jì)算機(jī)軟件進(jìn)行運(yùn)動(dòng)模擬,將機(jī)構(gòu)的運(yùn)動(dòng)分析過(guò)程可視化,使設(shè)計(jì)結(jié)果更為直觀.
實(shí)例分析表明,在曲柄連桿機(jī)構(gòu)設(shè)計(jì)研究中,應(yīng)用矩陣進(jìn)行分析和運(yùn)算,可以很方便地獲取該機(jī)構(gòu)的各種屬性,分析過(guò)程簡(jiǎn)單易懂,同時(shí),也使曲柄連桿機(jī)構(gòu)的設(shè)計(jì)過(guò)程更為精確、可靠.在此基礎(chǔ)上,利用計(jì)算軟件輔助設(shè)計(jì)曲柄連桿機(jī)構(gòu),充分發(fā)揮了計(jì)算機(jī)強(qiáng)大的運(yùn)算能力,提高了機(jī)械設(shè)計(jì)的質(zhì)量和效率[8].當(dāng)然,在對(duì)連桿機(jī)構(gòu)以外的其他類型機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)分析時(shí),亦可引入合理的矩陣來(lái)描述連桿機(jī)構(gòu)的內(nèi)部信息.
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06